Изобретение относится к оптико-механическим и оптико-электронным устройствам и может быть использовано в системах управления авиационными комплексами.
Известен способ определения ориентации оси визира, патент США №3375375, заключающийся в том, что при помощи сканирующих фотоприемных блоков определяют угловое положение источников излучения (фотоэлементов (ФЭ) методом поэлементной пеленгации. Определяют плоскость в пространстве, которая проходит через ФЭ, и восстанавливают к ней перпендикуляр, который колинеарен оси визира.
Известны оптико-электронные устройства дистанционного определения ориентации нашлемного визира, патенты США: №3678823, 4209254, 3375375, 3917412; патенты Франции №2076693, 2168425, выполненные по схеме поэлементной пеленгации источников излучения ФЭ, расположенных на защитном шлеме и ориентированных относительно оси визира таким образом, что по сигналу углов-пеленгов, которые определяются сканирующими фотоприемньми блоками, рассчитывают пространственное положение источников излучения, а значит и угловое положение оптической оси нашлемного визира.
Недостатком известных способов и устройств (аналогов) является недостаточная для решения задач прицеливания точность определения положения линии визирования.
Наиболее близким по технологической сущности к предложенному является способ прицеливания, приведенный в патенте GB №2002986 А, кл. F 41 G 3/22 от 28.02.1979 г.
В способе-прототипе осуществляют оптическими лучами сканирование пространства, в котором расположен нашлемный узел с несколькими излучающими диодами, определяют первичные пеленги на каждый из излучающих диодов и положение каждого из излучающих диодов в пространственной плоскости, проходящей через реперные точки нашлемного узла, в которых размещены излучающие диоды.
Недостатком способа-прототипа является недостаточная для решения задач прицеливания точность определения положения линии визирования.
В качестве устройства-прототипа взято устройство прицеливания нашлемной системой целеуказания, приведеное в патенте GB № 2002986 А, кл. F 41 G 3/22 от 28.02.1979 г.
Данное устройство-прототип содержит нашлемный узел с излучающими диодами, расположенный на защитном шлеме, сканирующие блоки и устройство определения линии визирования.
Ошибка при определении положения линии визирования состоит из инструментальной ошибки устройства и ошибки из-за тремора головы летчика (оператора) в процессе прицеливания. Тремор головы летчика (оператора) во время полета составляет 1°30' при основной частоте 0,1-1,5 Гц (по данным института авиационной и космической медицины НИИАКМ, г.Москва).
Таким образом ошибка тремора является доминирующей в суммарной ошибке определения положения линии визирования, так как инструментальная ошибка прибора равна приблизительно 10'.
Таким образом, недостатком прототипа является недостаточная для решения задачи прицеливания точность.
При разработке способа прицеливания нашлемной системой целеуказания, который заявляется, решалась задача компенсации ошибки определения положения линии визирования, возникающей в результате тремора головы летчика (оператора) и составляющей 1°30' при частоте 0,1-1,5 Гц. При этом сложность заключается в том, что частота тремора соизмерима с частотой полезного сигнала сопровождения цели. Анализируя величину ошибки, возникающей в результате тремора, понятно, что она является основной и дальнейшее уменьшение инструментальной ошибки нашлемной системы целеуказания (НСЦ) нецелесообразно без устранения ошибки, вызванной тремором.
Тремор имеет установочные и основные колебания. Установочные колебания можно не принимать во внимание, потому что стабилизация тремора, то есть переход к основным колебаниям, происходит в первые 5 с полета. При всей динамичности и большом количестве вариантов показателей существует индивидуальное постоянство тремора, то есть стабильный ритм тремора для каждого летчика (оператора) в определенных условиях работы.
Для решения поставленной задачи в известном способе прицеливания нашлемной системой целеуказания, включающем сканирование оптическими лучами пространства, в котором расположен нашлемный узел с несколькими излучающими диодами, определяют первичные пеленги на каждый из излучающих диодов и положение каждого из излучающих диодов в пространственной плоскости, проходящей через реперные точки нашлемного узла, в которых размещены излучающие диоды, сканирование пространства осуществляют плоскими оптическими веерньми лучами, по значениям пеленгов определяют ускорение изменения значений пеленгов, знак изменения ускорения, период изменения знака ускорения, инвертируют значение ускорения изменения каждого первичного пеленга и полученные значения суммируют с соответствующими значениями первичных пеленгов, по полученным суммарным значениям первичных пеленгов определяют положение линии визирования нашлемной системы целеуказания в пространстве.
Таким образом осуществляют вычисление положения линии визирования с учетом компенсации тремора головы летчика (оператора).
Основной предпосылкой для этого является то, что тремор имеет возвратно-поступательное движение, период и амплитуда для каждого индивидуума и условия эксплуатации постоянные, отслеживание на последнем отрезке слежения за целью происходит с постоянной скоростью, то есть на этом участке все колебания линии визирования происходят только из-за тремора головы.
Значение тремора головы летчика (оператора) определяют так.
Два оптических блока сканируют плоскими веерными оптическими лучами нашлемный узел. Все смещения нашлемного узла в вертикальной плоскости, при данном способе определения его положения, не учитываются, а горизонтальные - определяют путем вычисления первичных пеленгов, в значениях которых учтено и значение тремора.
Определяем прирост значений первичных пеленгов в каждом периоде сканирования (определяем скорость смещения линии визирования):


Затем определяем ускорение линии визирования:
и т.д. для всех n излучающих диодов.
Учитывая ранее сказанное, ускорение изменения положения линии визирования зависит только от тремора головы летчика (оператора).
При разработке заявляемого устройства решалась задача компенсации ошибки тремора при определении положения линии визирования с помощью нашлемной системы целеуказания.
Для решения поставленной задачи известное устройство прицеливания нашлемной системой целеуказания, содержащее нашлемный узел с излучающими диодами, расположенный на защитном шлеме, сканирующие блоки, устройство определения линии визирования, снабжено блоком определения кодов пеленгов, счетчиком периодов сканирования и несколькими устройствами определения и учета тремора головы летчика (оператора), каждое из которых соединено с соответствующим выходом блока определения кодов пеленгов через первые схемы управления, каждая из которых состоит из двух элементов «И», вторые входы которых соединены с соответствующими выходами счетчика периодов сканирования, которые являются и вторыми входами вторых схем управления, каждая из которых состоит из двух элементов «И», а входы - со входами регистров первичных пеленгов, выходы которых соединены с первой схемой вычитания, соединенной выходами через вторые схемы управления с регистрами прироста, выходы которых соединены со входами второй схемы вычитания, выход которой соединен со входом пик-детектора и запоминающего устройства, а выход запоминающего устройства соединен с одним из входов сумматора, второй вход которого соединен с соответствующим выходом блока определения кодов пеленгов, третий - с выходом счетчика делителя, входом которого является выход пик-детектора, а выход сумматора соединен с одним из входов устройства определения линии визирования, при этом вход счетчика периодов сканирования соединен с одним из выходов сканирующих блоков.
Таким образом, задача, поставленная перед авторами при разработке заявляемого устройства, достигается за счет введения в известную систему целеуказания устройства определения и учета тремора головы летчика (оператора), счетчика периодов сканирования, которые позволяют получить информацию о величине периода и амплитуде тремора головы летчика (оператора) по данным о пространственном положении каждого из излучающих диодов от всех сканирующих блоков.
Суть предложенного изобретения поясняется чертежами, где изображены на:
Фиг.1 - принцип работы нашлемной системы целеуказания;
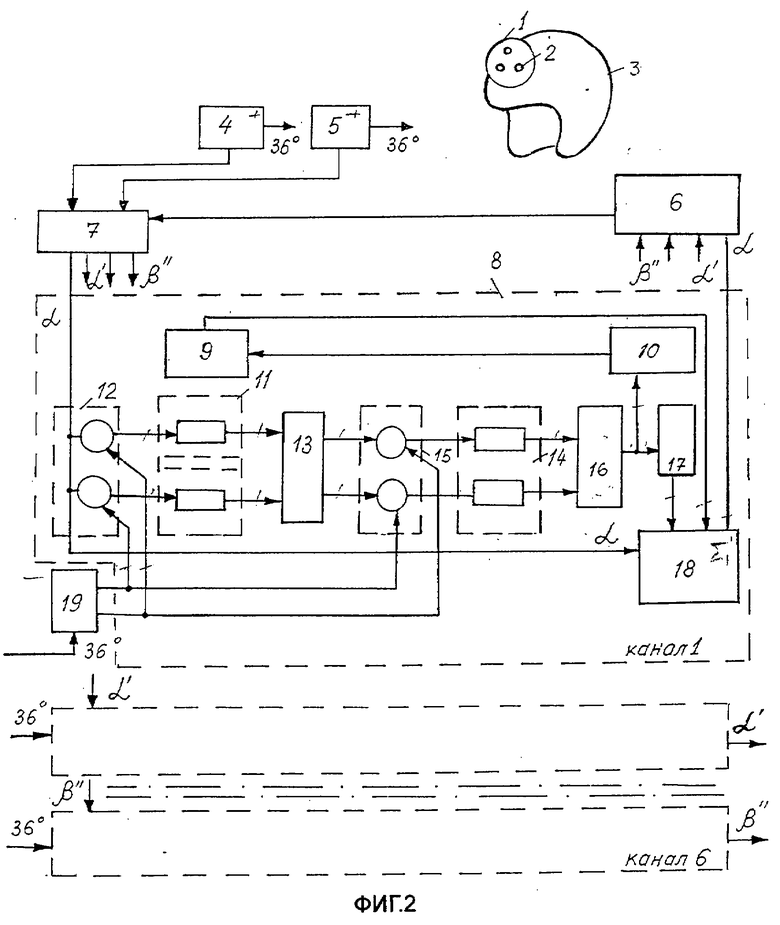
Фиг.2 - блок-схема предложенного устройства;
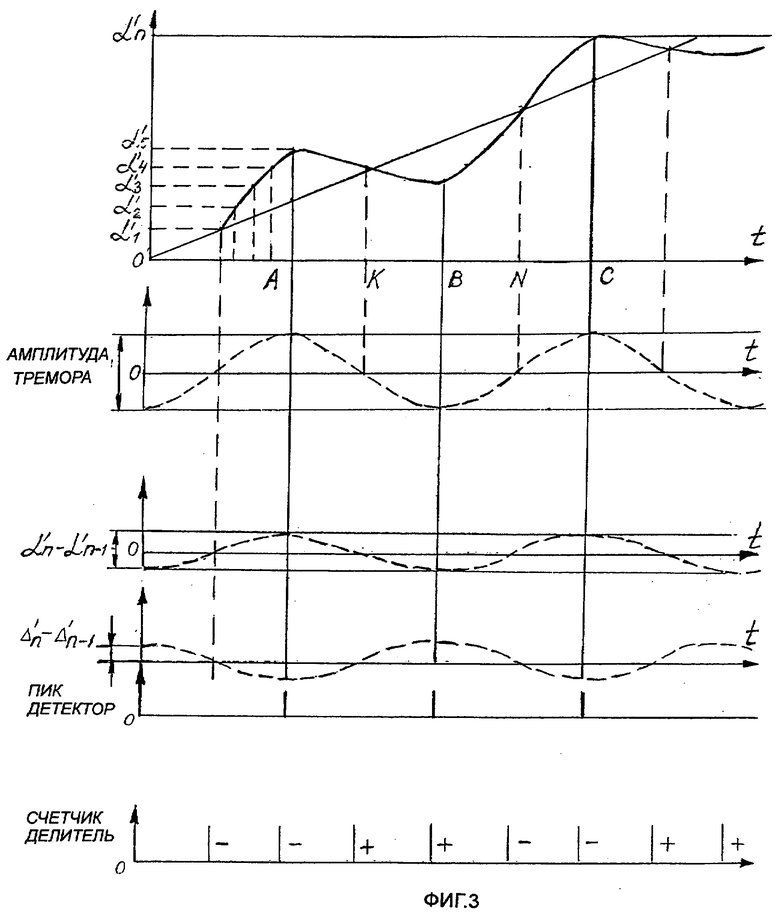
Фиг.3 - диаграмма работы предложенного устройства.
Рассмотрим способ прицеливания нашлемной системой целеуказания. Сканирующие блоки формируют плоские вертикальные веерные лучи, сканирующие пространство, в котором находится нашлемный узел с излучающими диодами. Когда луч пересекает какой-либо ИД, вырабатывается сигнал, формирующий первичный пеленг на данный ИД. Если учитывать, что сканирующих блока два, а излучающих диодов три, то получаем шесть пеленгов на ИД, а именно: α; α'; α''; β; β'; β''.
Учитывая, что тремор имеет синусоидальную форму с постоянной амплитудой и периодом для каждого индивидуума, то результат сигнала, представленный на Фиг.3, является суммой полезного движения головы и тремора.
Учитывая, что наблюдение за целью на последнем отрезке слежения происходит с постоянной скоростью, то ускорение полезного сигнала равняется практически нулю.
Рассмотрим путь, который проходит ИД1 при слежении за целью от точки A до точки С (Фиг.1). При этом один из пеленгов на этот ИД1, например, α' изменяется от α1' до αn'.
От точки A до точки B при изменении скорости (то есть α2'-α1'=-Δ1) и т.д. все значения от α' до αn' имеют "-Δ", а все точки от B до С имеют "+Δ". При этом ускорение имеет отрицательную величину на участке AK и NC, а на участке KB и BN - положительную. Если мы знаем величину и знак ускорения, то инвертируем величину значений ускорения и суммируем ее с реально полученным сигналом слежения за целью, получая таким образом величину полезного сигнала без тремора.
Полупериод тремора, который совпадает по направлению с направлением полезного сигнала, дает положительную скорость, а направленный в противоположную сторону - отрицательную. От точки A до точки B скорость отрицательная, а от точки B до точки С - положительная.
В состав предлагаемого устройства (Фиг.2) входят нашлемный узел 1 с излучающими диодами 2, расположенными на защитном шлеме 3, устройство определения линии визирования 6, блок определения кодов пеленгов 7, устройство определения и учета тремора головы оператора 8 для каждого первичного пеленга (то есть m каналов).
Устройство определения и учета тремора головы оператора 8 состоит из счетчика делителя 9, пик-детектора 10, регистров первичных пеленгов 11 со схемами управления 12, схемы вычитания 13, регистров прироста 14 со схемами управления 15, схемы вычитания 16, запоминающего приспособления 17 и сумматора 18.
Кроме этого, в состав устройства входит счетчик периодов сканирования 19. Все элементы данного устройства могут быть выполнены на основе стандартизированной элементной базы.
Устройство работает таким образом.
Пространство, в котором находится нашлемный узел 1 с излучающими диодами 2, расположенными на защитном шлеме 3 летчика (оператора), сканируется веерными плоскими оптическими лучами, которые формируются сканирующими блоками 4, 5 (оптическая локация).
Все смещения нашлемного узла 1 в вертикальной плоскости, при данном способе определения его положения, не учитываются, а горизонтальные - определяются путем вычисления первичных пеленгов в блоке определения первичных кодов пеленгов 7. То есть, значения тремора, которые присутствуют в значениях первичных кодов пеленгов α; α'; α'' и β; β'; β'', если излучающих диодов 2 три.
Рассмотрим работу устройства для одного из излучающих диодов 2 и одного сканирующего блока 4.
Вычисленные значения α с блока определения кодов пеленгов 7 поступают в устройство определения и учета тремора головы летчика (оператора) 8, а именно на первые схемы управления 12, которые состоят из. двух схем "И", на вторые входы которых поступают сигналы со счетчика периодов сканирования 19. Счетчики периодов сканирования 19 считают импульсы начала сканирования, которые формируются в СКАБ 4, 5, то есть в каждом цикле сканирования значение записывается через первую схему "И" первой схемы управления 12 в первый регистр первичных пеленгов 11, а во втором цикле сканирования информация о α2 записывается через вторую схему "И" первой схемы управления 12 во второй регистр первичных пеленгов 11.
Значение α3 записывается в первый регистр первичных пеленгов 11, а α4 - во второй и т.д.
Записанные в регистрах первичных пеленгов значения α1 и α2 поступают на первую схему вычитания 13, где и определяют прирост α вкаждом цикле (то есть скорость - первое производное).
Через вторые схемы управления 15 по тем же командам со счетчика периодов сканирования 19 значения приростов Δ1 и Δ2 записываются в соответствующие регистры прироста 14. Во второй схеме вычитания 16 определяют текущую разницу Δ2-Δ1; Δ3-Δ2; Δ4-Δ3; и т.д., то есть определяют вторую производную прироста α, то есть ускорение. Полученная информация записывается в устройстве 17, которое запоминает значение синусоиды, отвечающей тремору головы летчика (оператора), а учитывая, что скорость изменения α в процессе прицеливания на конечном участке постоянная, то ускорение образуется только за счет тремора. Полученная информация с запоминающего устройства 17 поступает с противоположным знаком на сумматор 18, где и суммируется со значениями α, которые поступают с блока определения кодов пеленгов 7. Знак сложения или вычитания на сумматор 18 поступает со счетчика делителя 9, который считает импульсы с пик-детектора 10, определяющими момент изменения знака прироста со второй схемой вычитания 16 (см. Фиг.3). С выхода сумматора 18 информация поступает на устройство определения линии визирования 6.
По сравнению с базовым объектом, за который взято изделие «Сура», где тремор головы летчика (оператора) присутствует в ошибке прицеливания, а значение ошибки тремора равно 1°30', точность прицеливания увеличена до 5', что позволяет использовать нашлемную систему целеуказания в качестве прицела.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2275651C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2208758C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| СПОСОБ ИЗМЕРЕНИЯ | 1995 |
|
RU2117250C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158406C1 |
Изобретение относится к оптико-механическим и оптико-электронным устройствам и может быть использовано в системах управления авиационными комплексами. Технический результат - повышение точности прицеливания. В основу способа положено сканирование пространства, в котором находится нашлемный узел с несколькими (n) излучающими диодами, определение первичных пеленгов на каждый из n излучающих диодов и положения n излучающих диодов в пространственной плоскости, проходящей через реперные точки нашлемного узла, в которых размещены излучающие диоды. По значениям первичных пеленгов определяют ускорение изменения значений пеленгов, инвертируют значение ускорения изменения каждого первичного пеленга и полученные значения суммируют с соответствующими значениями первичных пеленгов. По полученным суммарным значениям первичных пеленгов определяют положение линии визирования нашлемной системы целеуказания в пространстве. В устройство прицеливания, состоящее из нашлемного узла с излучающими диодами, сканирующих блоков, блока определения кодов пеленгов и устройства определения линии визирования, введен счетчик периодов сканирования и устройство определения и учета тремора головы летчика. Каждый из них соединен с соответствующим выходом блока определения кодов пеленгов. 2 н.п. ф-лы, 3 ил.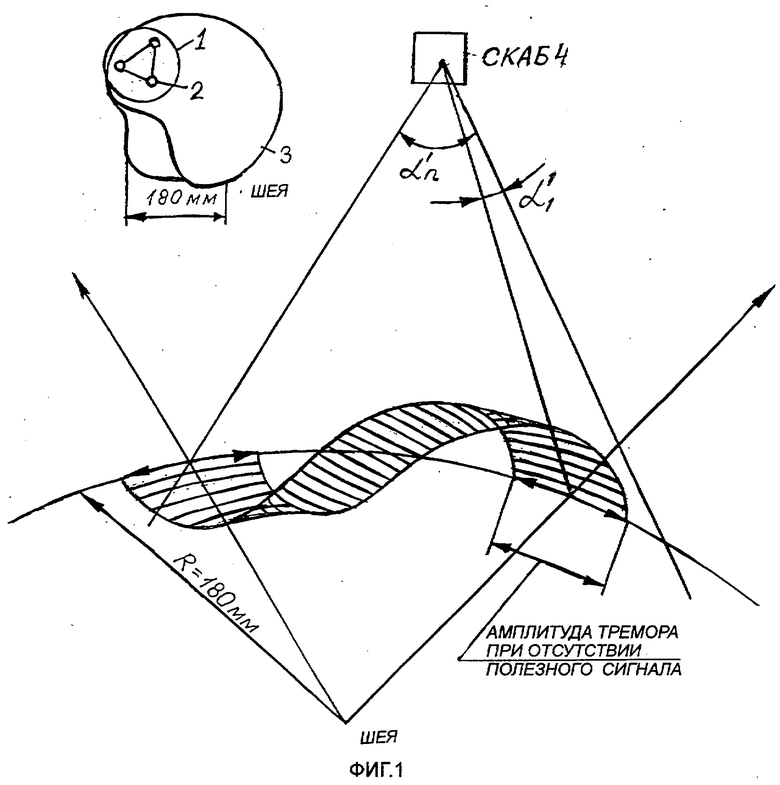
| GB 2002986 А, 28.02.1979 | |||
| US 3375375 А, 26.03.1968 | |||
| US 3917412 А, 04.11.1975 | |||
| КРЕМ ДЛЯ УХОДА ЗА КОЖЕЙ ЛИЦА | 1994 |
|
RU2076693C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168425C2 |

