Таблицыы
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УРАВНОВЕШИВАНИЯ ЖЕСТКИХ РОТОРОВ С МОМЕНТНО-НЕУРАВНОВЕШЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ЭЛЕМЕНТАМИ | 2001 |
|
RU2183824C1 |
| УСТРОЙСТВО УСТАНОВКИ И КОМПЕНСАЦИИ МОМЕНТНОЙ НЕУРАВНОВЕШЕННОСТИ НАКЛОННОГО К ПЛОСКОСТИ ВРАЩЕНИЯ ДИСКА | 2007 |
|
RU2345342C1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ СТРУКТУРНО-НЕОДНОРОДНОГО ЖЕСТКОГО РОТОРА С НАКЛОННЫМ ДИСКОМ | 1999 |
|
RU2153154C1 |
| СПОСОБ КРЕПЛЕНИЯ И УРАВНОВЕШИВАНИЯ НАКЛОННОГО К ПЛОСКОСТИ ВРАЩЕНИЯ ДИСКА | 2005 |
|
RU2288455C1 |
| СПОСОБ КРЕПЛЕНИЯ И УРАВНОВЕШИВАНИЯ ДИСКА, НАКЛОННОГО К ПЛОСКОСТИ ВРАЩЕНИЯ | 2006 |
|
RU2325266C2 |
| СПОСОБ УСТАНОВКИ, ВЗАИМНОЙ ФИКСАЦИИ И УРАВНОВЕШИВАНИЯ ЭЛЕМЕНТОВ УЗЛА КРЕПЛЕНИЯ НАКЛОННОГО К ПЛОСКОСТИ ВРАЩЕНИЯ ДИСКА | 2007 |
|
RU2330253C1 |
| СБОРНЫЙ ПРОДОЛЬНО-ПРЕРЫВИСТЫЙ ШЛИФОВАЛЬНЫЙ КРУГ | 2001 |
|
RU2200083C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ ПРОДОЛЬНО-ПРЕРЫВИСТОГО ПОНИЖАЮЩЕГО ТЕМПЕРАТУРУ ШЛИФОВАНИЯ | 2001 |
|
RU2199429C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
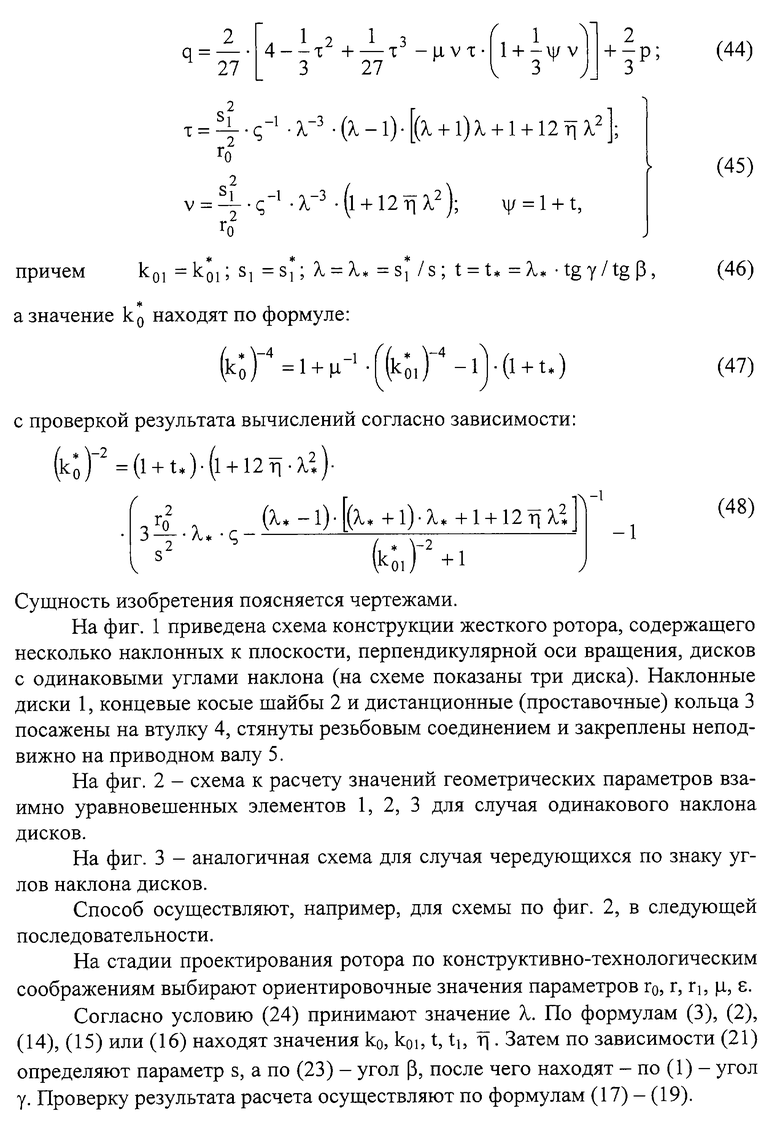
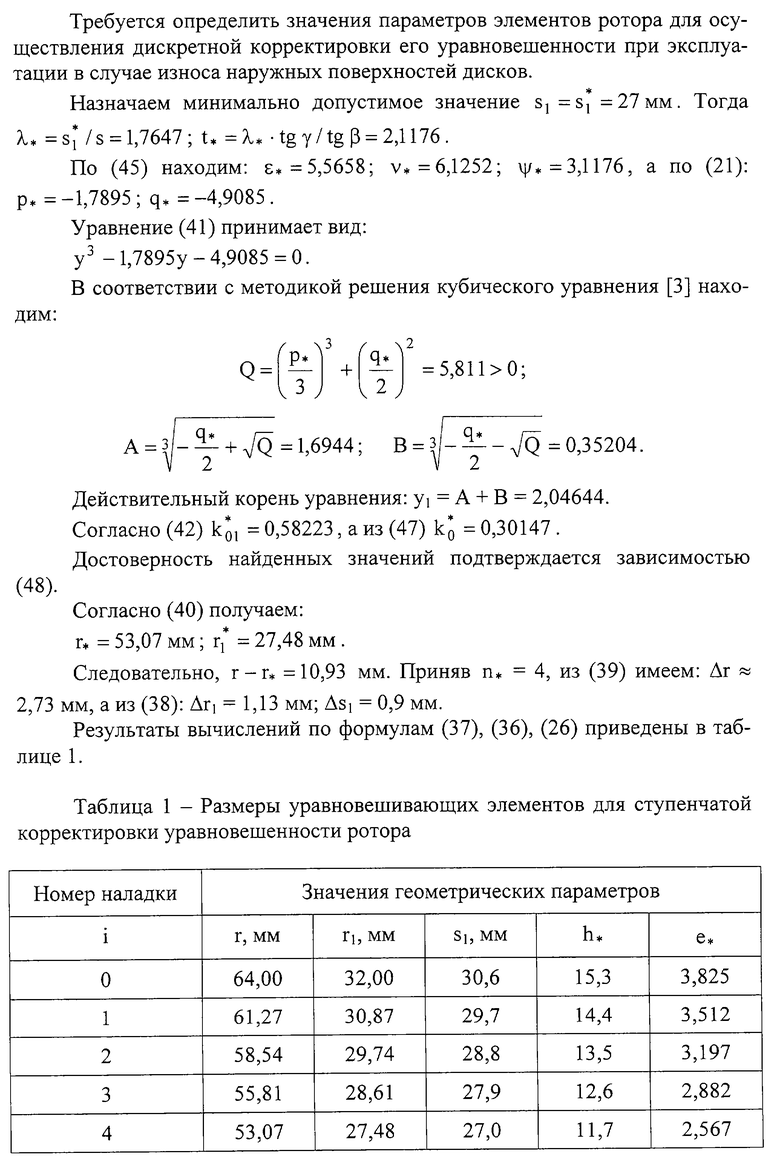
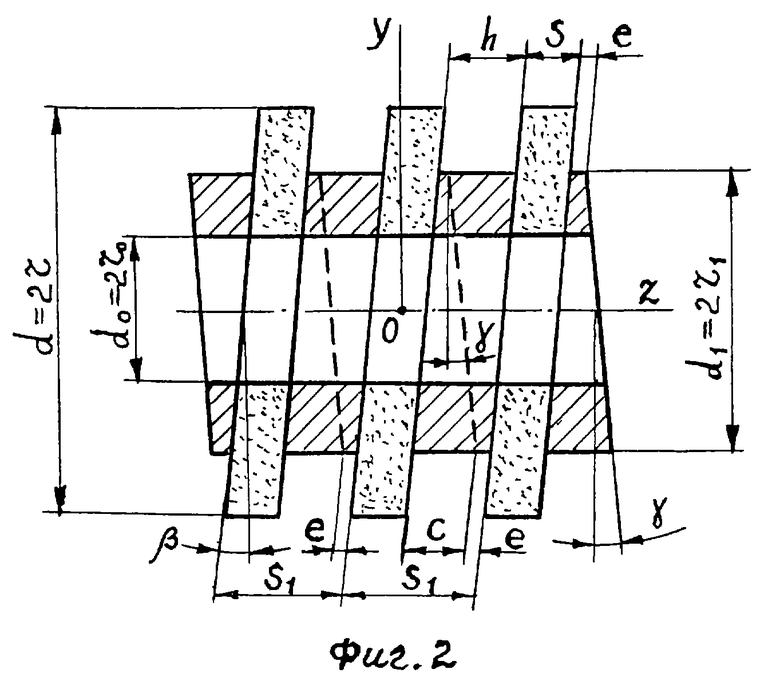
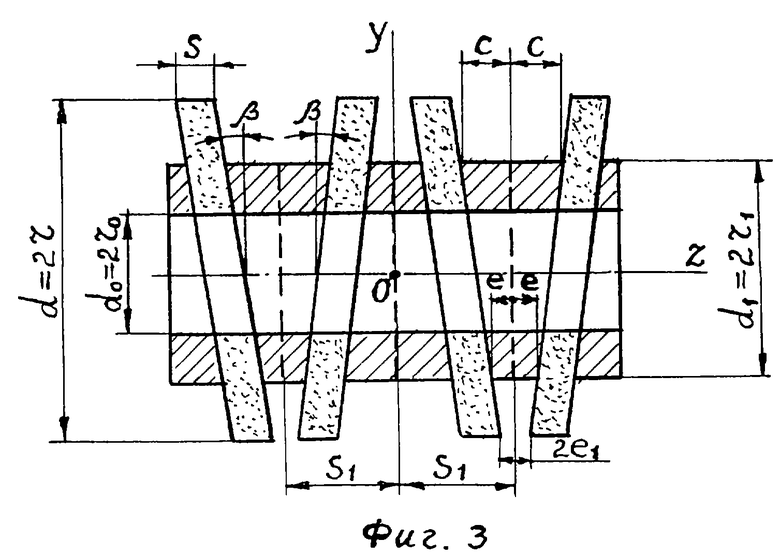
Изобретение относится к машиностроению и может быть использовано при эксплуатации сборных жестких роторов. Способ уравновешивания сборных роторов с наклонными дисками заключается в определении значений геометрических параметров ротора расчетным методом и корректировку его уравновешенности в процессе эксплуатации. Причем в случае ротора с одинаково наклоненными дисками в качестве уравновешивающих элементов используются концевые косые шайбы, наружные плоскости которых отклонены от плоскости, перпендикулярной оси вращения, на угол, противоположный углу наклона дисков, в совокупности с проставочными кольцами, геометрические параметры которых определяют расчетным путем из выполнения условия динамической уравновешенности каждого условного блока, состоящего из диска и прилегающих к нему косых шайб. А в случае ротора с наклонными дисками, направление углов наклона которых чередуется, наружные плоскости концевых косых шайб выполняют перпендикулярными к оси вращения, а их геометрические параметры определяют расчетным путем из выполнения условия динамической уравновешенности каждого упомянутого условного блока. Данное изобретение решает задачу расширения возможностей и повышения эффективности способа уравновешивания жестких роторов сборного типа, содержащих моментно-неуравновешенные элементы. 2 с. и 5 з.п.ф-лы, 1 табл., 3 ил.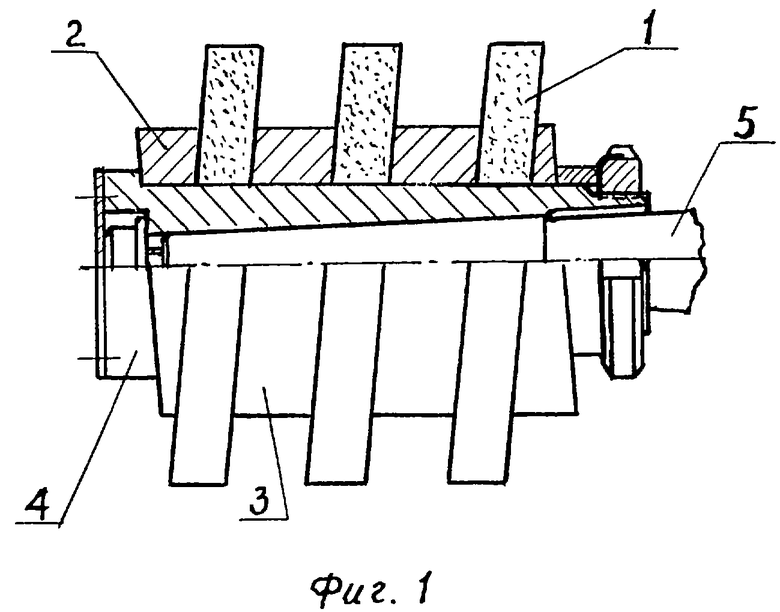

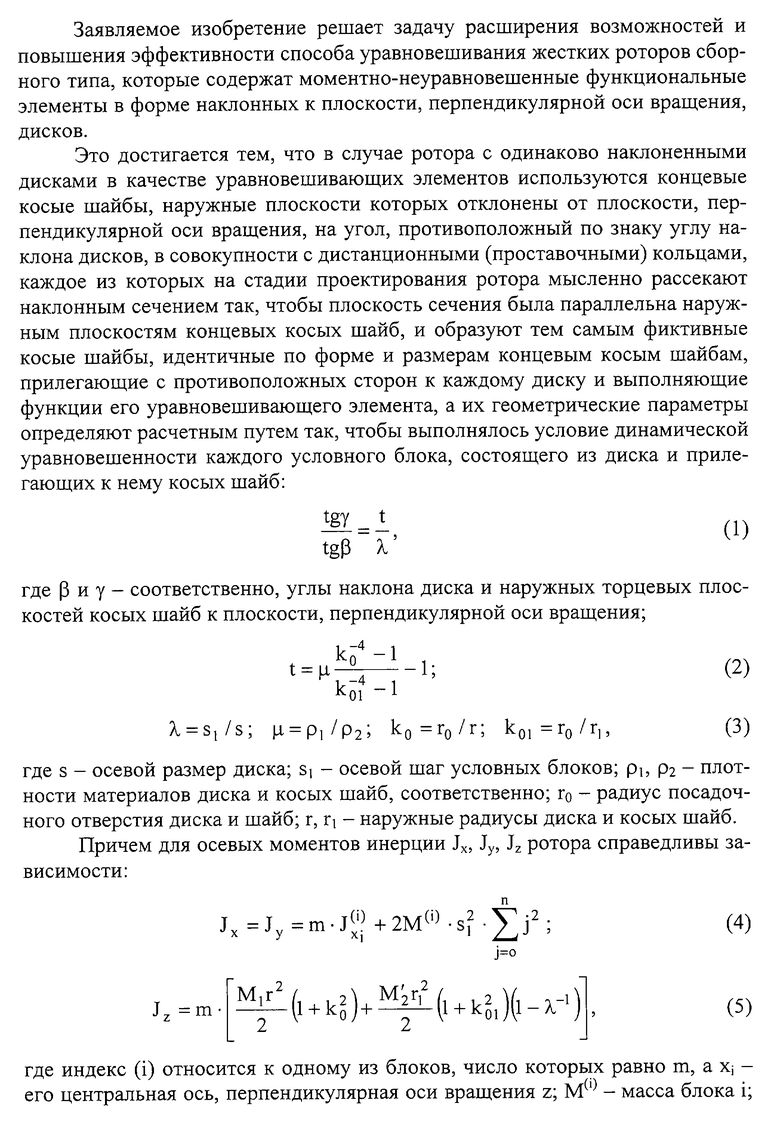
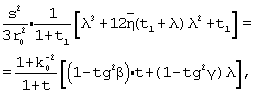
где β и γ - соответственно углы наклона диска и наружных торцевых плоскостей косых шайб к плоскости, перпендикулярной оси вращения;
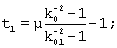
λ=s1/s; μ=ρ1/ρ2; k0=r0/r; k01=r0/r1,
где s - осевой размер диска;
s1 - осевой шаг условных блоков;
ρ1, ρ2 - плотности материалов диска и косых шайб соответственно;
r0 - радиус посадочного отверстия диска и шайб;
r, r1 - наружные радиусы диска и косых шайб, имея в виду, что для осевых моментов инерции Jx, Jy, Jz ротора справедливы зависимости

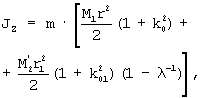
где индекс (i) относится к одному из блоков, число которых равно m;
хi - его центральная ось, перпендикулярная оси вращения z;
M(i) - масса блока i;
 - момент инерции блока i относительно оси хi;
- момент инерции блока i относительно оси хi;
х, y - центральные оси ротора, перпендикулярные оси вращения z;
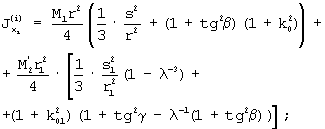

 масса цилиндра, соответствующего уравновешивающему элементу (паре косых шайб);
масса цилиндра, соответствующего уравновешивающему элементу (паре косых шайб);
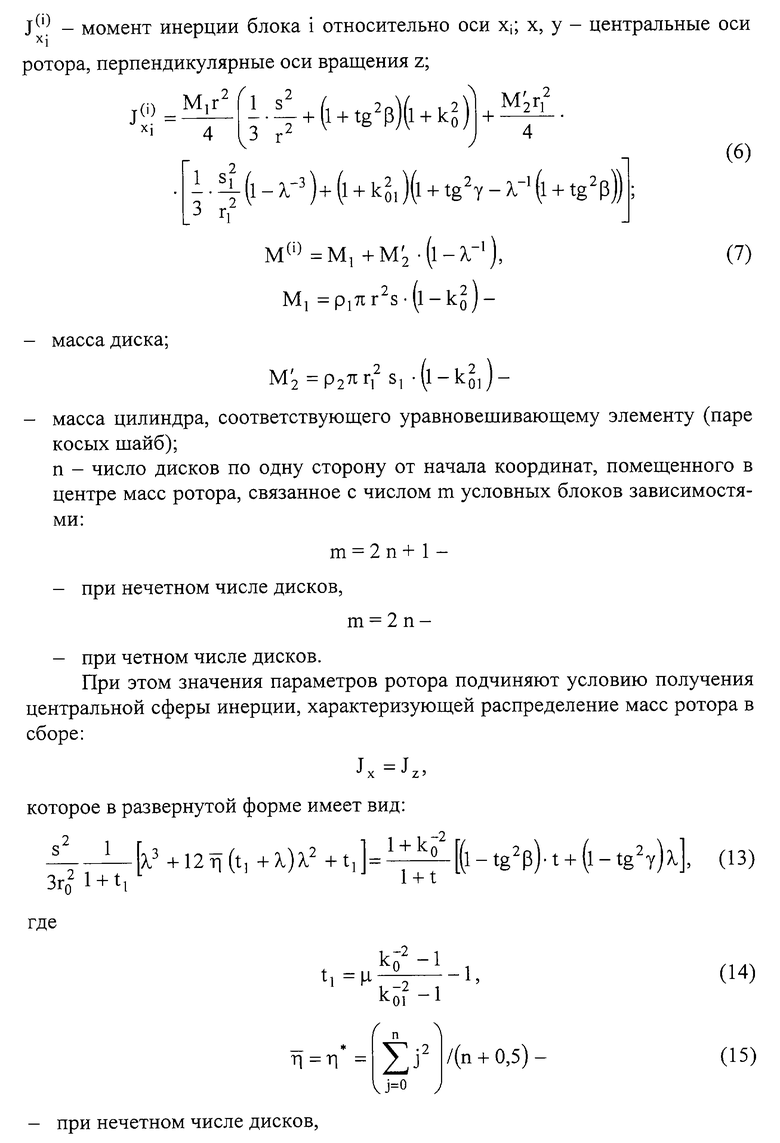
n - число дисков по одну сторону от начала координат, помещенного в центре масс ротора, связанное с числом m условных блоков зависимостями:
m=2n+1 - при нечетном числе дисков,
m=2n - при четном числе дисков.
где
при нечетном числе дисков,
при четном числе дисков,
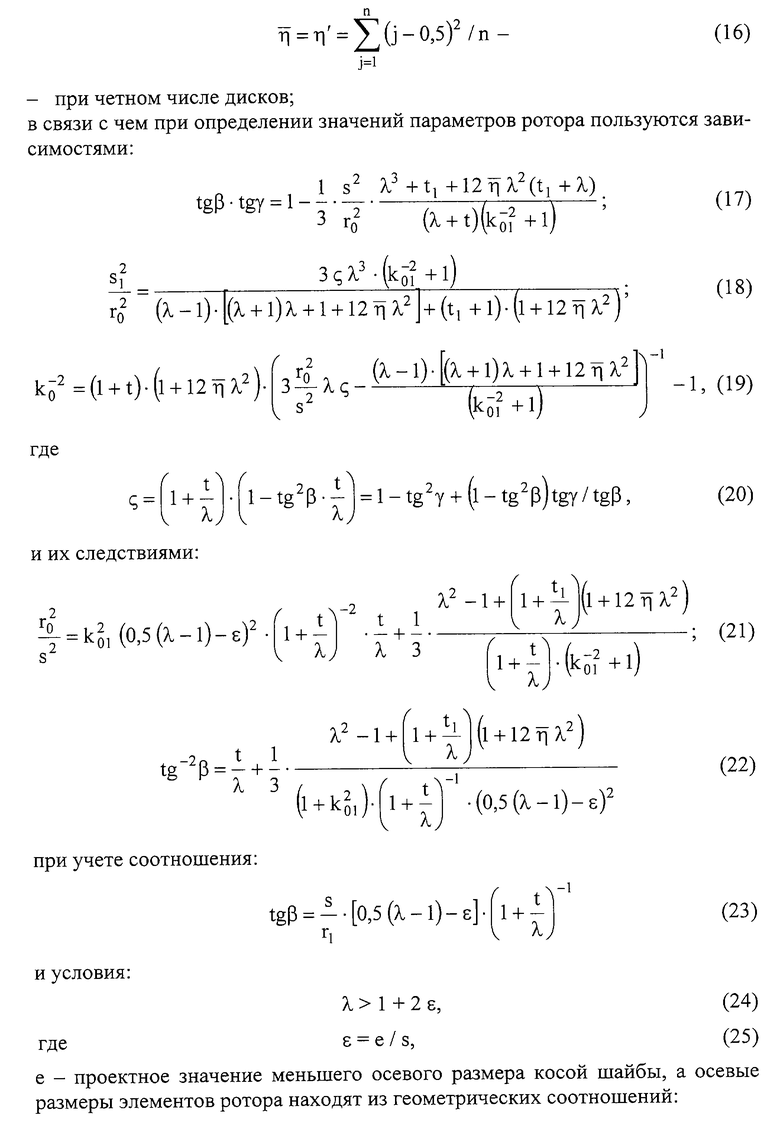
в связи с чем при определении значений параметров ротора пользуются зависимостями


где
и их следствиями
при учете соотношения

и условия
λ>1+2ε;
где ε=e/s;
е - проектное значение меньшего осевого размера косой шайбы,
а осевые размеры элементов ротора находят из геометрических соотношений
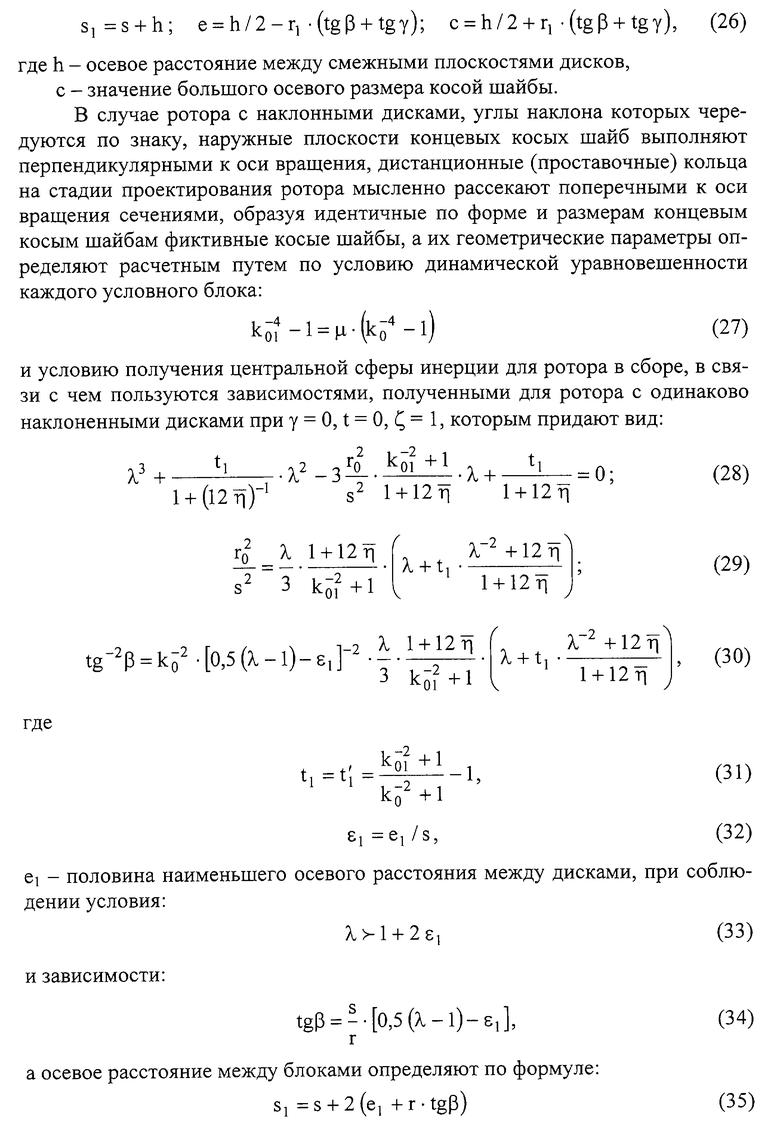
s1=s+h;
e=h/2-r1·(tgβ+tgγ);
c=h/2+r1·(tgβ+tgγ),
где h - осевое расстояние между смежными плоскостями дисков;
с - значение большого осевого размера косой шайбы.
s
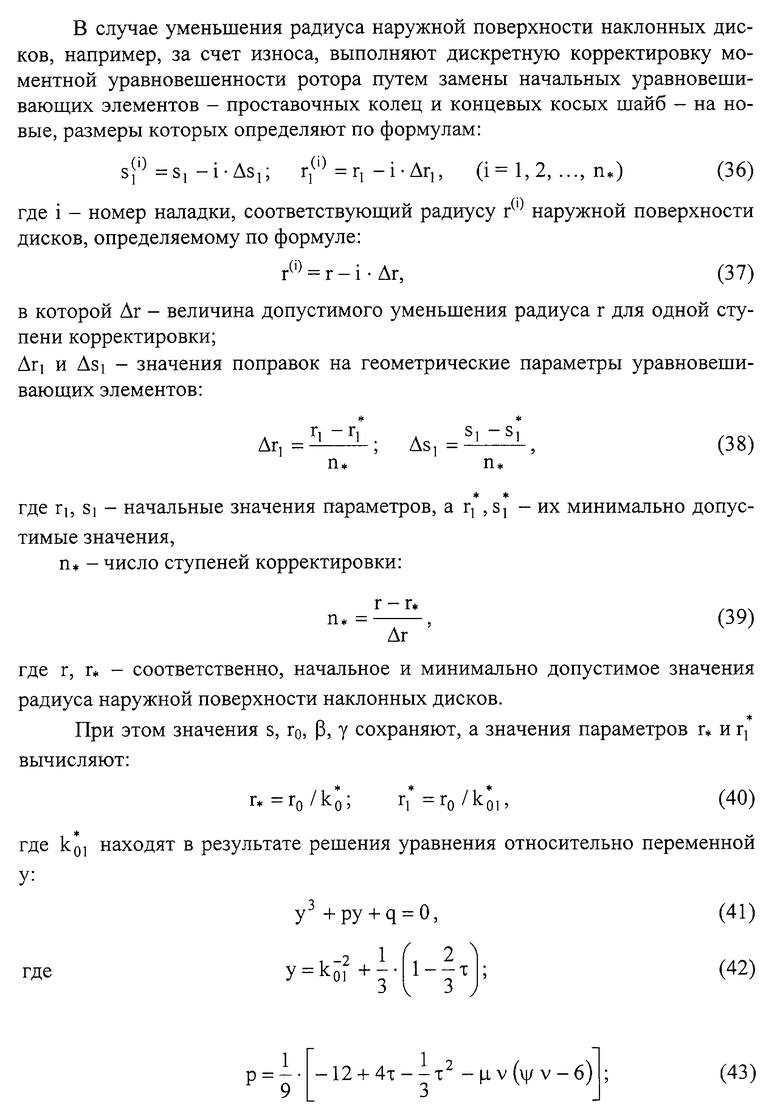
где i - номер наладки, соответствующий радиусу r(i) наружной поверхности дисков, определяемому по формуле

в которой Δr - величина допустимого уменьшения радиуса r для одной ступени корректировки;
Δr1 и Δs1 - значения поправок на геометрические параметры уравновешивающих элементов:

где r1, s1 - начальные значения параметров;
r1*, s1* - их минимально допустимые значения;
n* - число ступеней корректировки:
где r, r* - соответственно начальное и минимально допустимое значения радиуса наружной поверхности наклонных дисков.
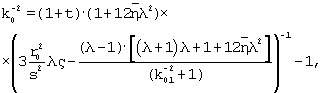
r*=r0/k0*; r1*=r0/k01*,
где k01* находят в результате решения уравнения относительно переменной у:
y3+py+q=0,
где

причем

а значение k0* находят по формуле:

с проверкой результата вычислений согласно зависимости:

и условию получения центральной сферы инерции для ротора в сборе, в связи с чем пользуются зависимостями, полученными для ротора с одинаково наклоненными дисками при γ=0,t=0,ς=l, которым придают вид:

где
ε1= e1/s;
e1 - половина наименьшего осевого расстояния между дисками, при соблюдении условия
λ>1+2ε1
и завиcимости

а осевое расстояние между блоками определяют по формуле
s1=s+2(e1+r·tgβ).
s
где i - номер наладки, соответствующий радиусу r(i) наружной поверхности дисков, определяемому по формуле
r(i)=r-i•Δr,
в которой Δr - величина допустимого уменьшения радиуса r для одной ступени корректировки;
Δr1 и Δs1 - значения поправок на геометрические параметры уравновешивающих элементов:

где r1, s1 - начальные значения параметров, a r1*, s1* - их минимально допустимые значения;
n* - число ступеней корректировки:
где r, r* - соответственно начальное и минимально допустимое значения радиуса наружной поверхности наклонных дисков.
r*=r0/k0*; r1*=r0/k01*,
где k01* находят в результате решения уравнения относительно переменной у:
y3+py+q=0,
где

причем

а значение k0* находят по формуле

с проверкой результата вычислений согласно зависимости
| СПОСОБ УРАВНОВЕШИВАНИЯ ЖЕСТКИХ РОТОРОВ С МОМЕНТНО-НЕУРАВНОВЕШЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ЭЛЕМЕНТАМИ | 2001 |
|
RU2183824C1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ СТРУКТУРНО-НЕОДНОРОДНОГО ЖЕСТКОГО РОТОРА С НАКЛОННЫМ ДИСКОМ | 1999 |
|
RU2153154C1 |
| БАЛАНСИРУЮЩЕЕ УСТРОЙСТВО ШЛИФОВАЛЬНОГО КРУГА | 1991 |
|
RU2006804C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ШЛИФОВАЛЬНОГО КРУГА | 1993 |
|
RU2042495C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| US 5811678 А, 22.09.1998 | |||
| DT 1573764 А1, 02.05.1974. | |||

