Изобретение относится к роботу-рабочему для работы в космическом пространстве для контроля состояния конструкции жилого модуля в космическом пространстве или замены прикрепляемого элемента. Робот-рабочий содержит корпус и, по меньшей мере, одно устройство рук, которое включает в себя множество элементов рук, шарнирно сочлененных в своих концевых частях, прикрепленных с возможностью поворота одними своими концами к корпусу робота, имеет манипуляционный инструмент, соединенный с другими его концами, и выполнено в виде выдвигаемого и втягиваемого устройства. Устройство рук включает в себя, по меньшей мере, одну перемещающую руку и одну многофункциональную руку. Перемещающая рука перемещает корпус робота с помощью манипуляционного инструмента, захватывающего головку болта для прикрепления прикрепляемого элемента, который прикрепляется к поверхности конструкции либо для удаления этого болта и завинчивания другого болта с помощью выдвижения или втягивания самой перемещающей руки. Изобретение позволит надежно перемещаться по поверхности конструкции модуля в космическом пространстве и может отвинчивать болты для замены целевой конструкции новой и устанавливать эту конструкцию, надежно закреплять корпус робота, легко и точно перемещаться для наблюдений. 5 с. и 28 з.п.ф-лы, 34 ил.
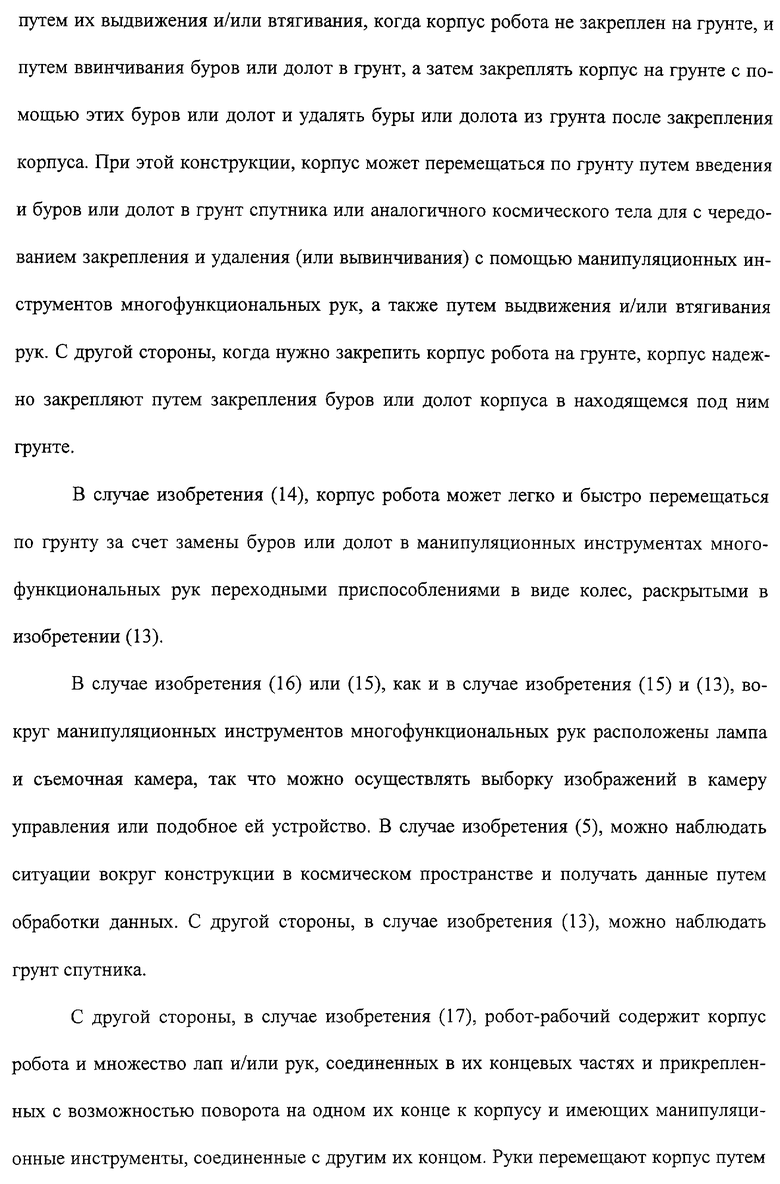
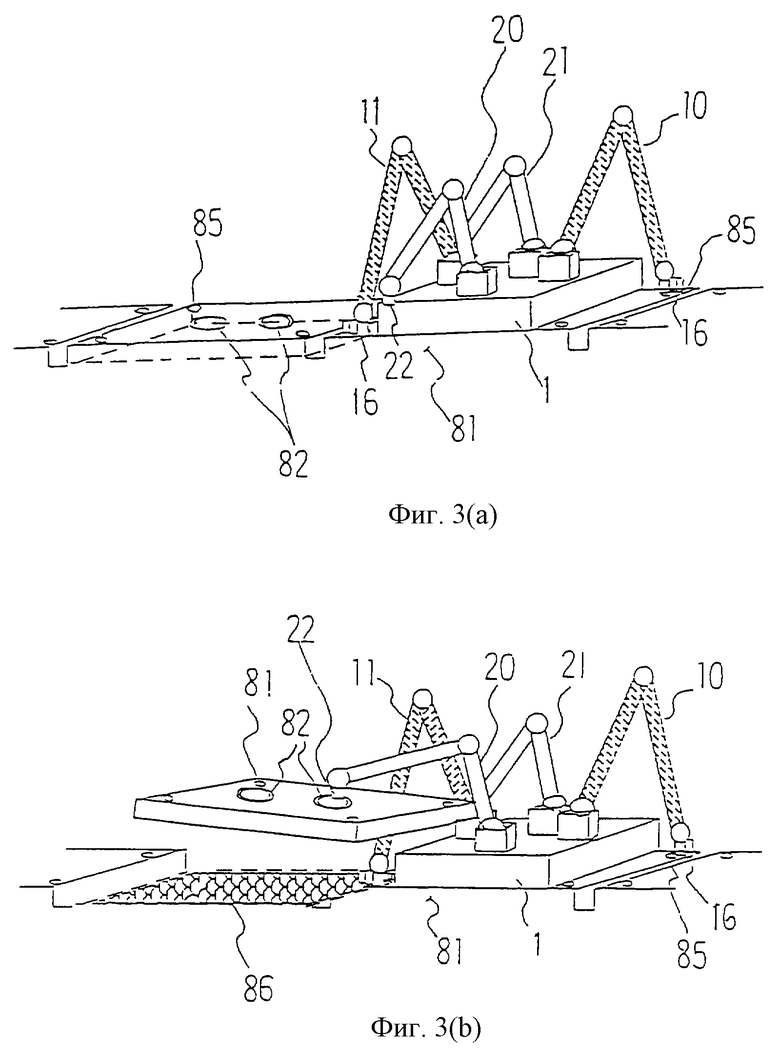
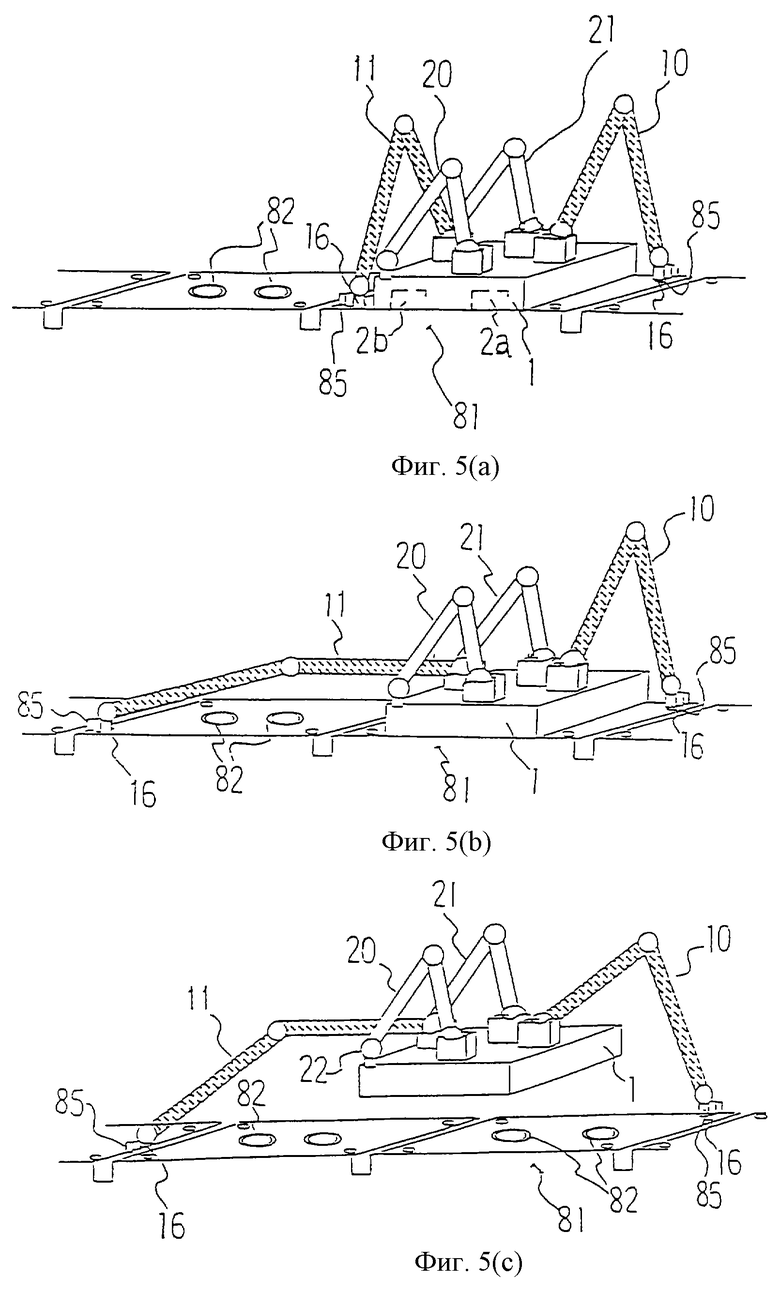
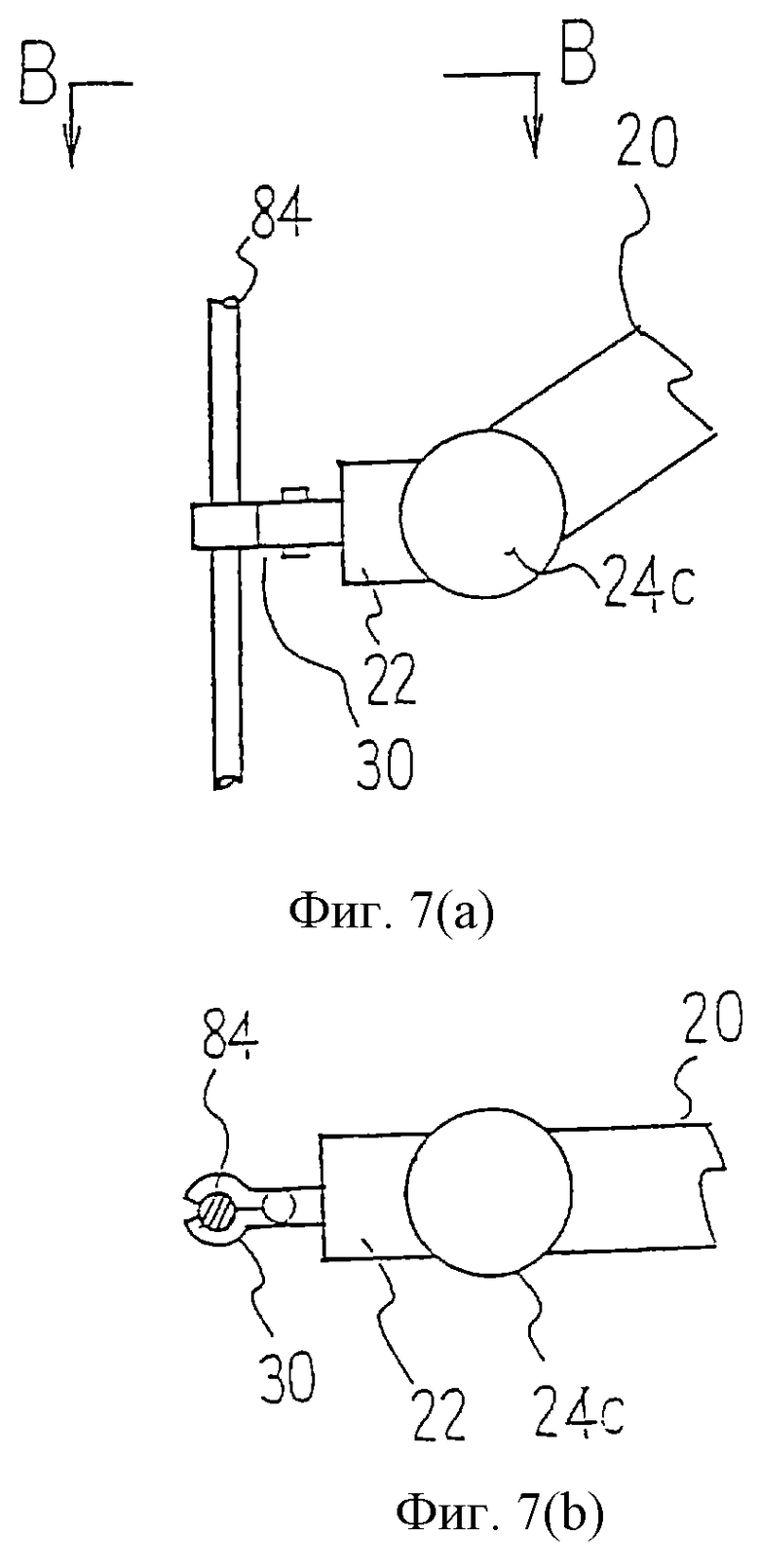
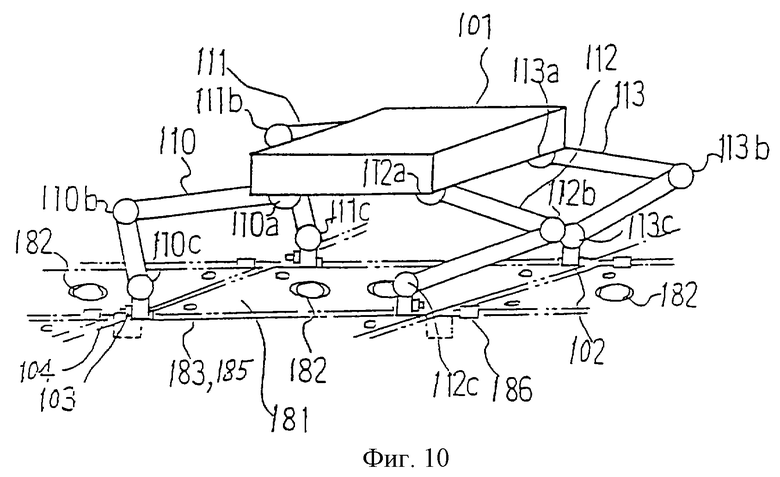
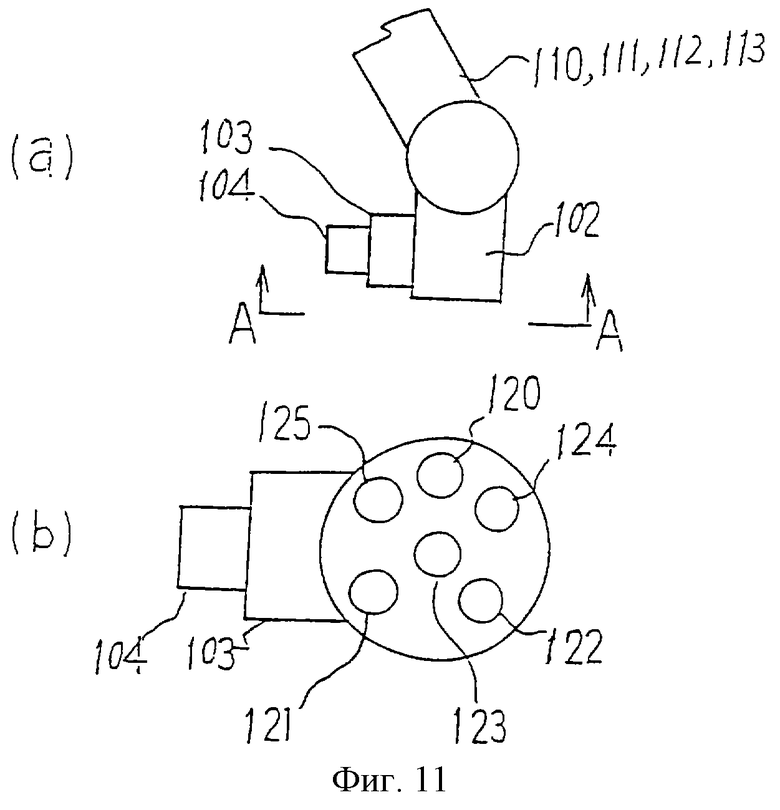
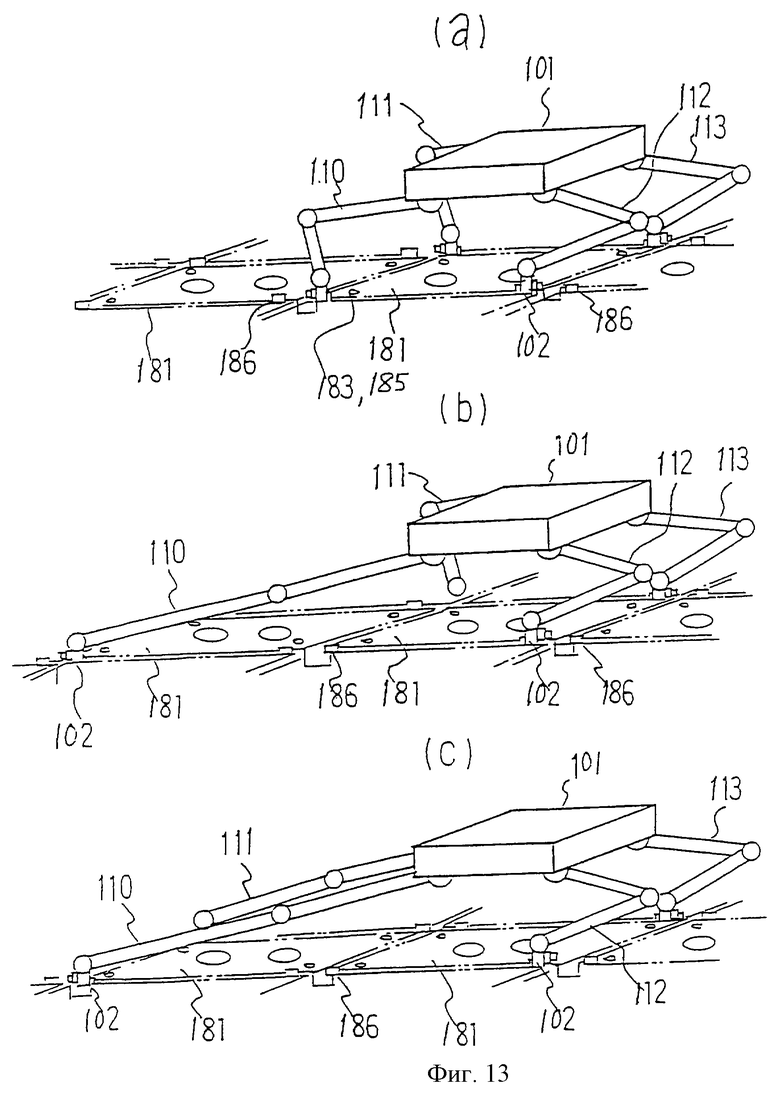
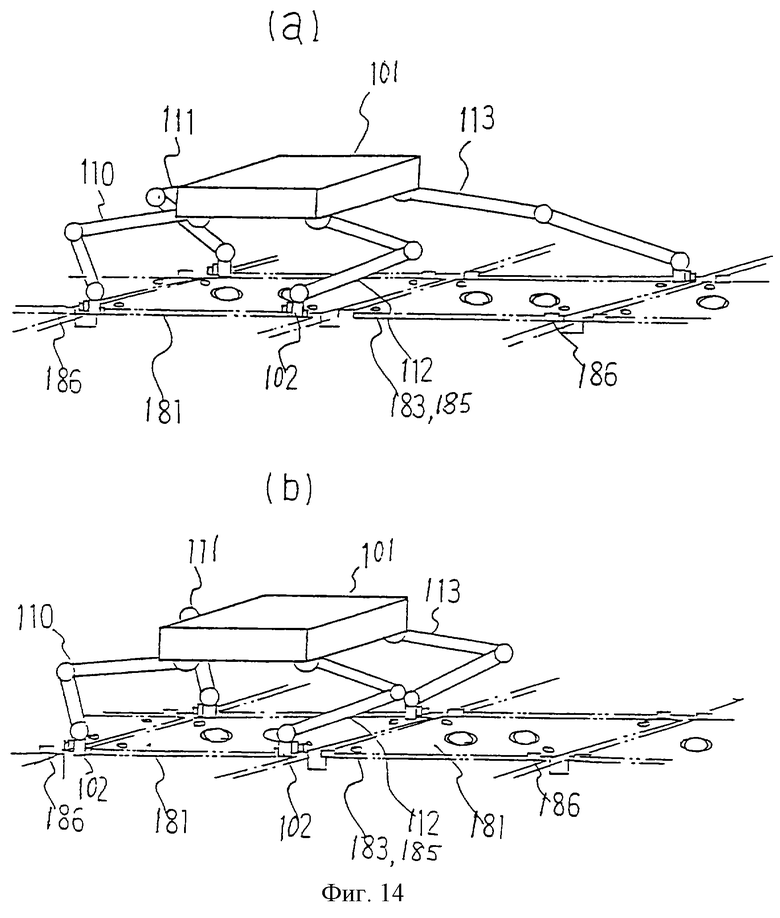
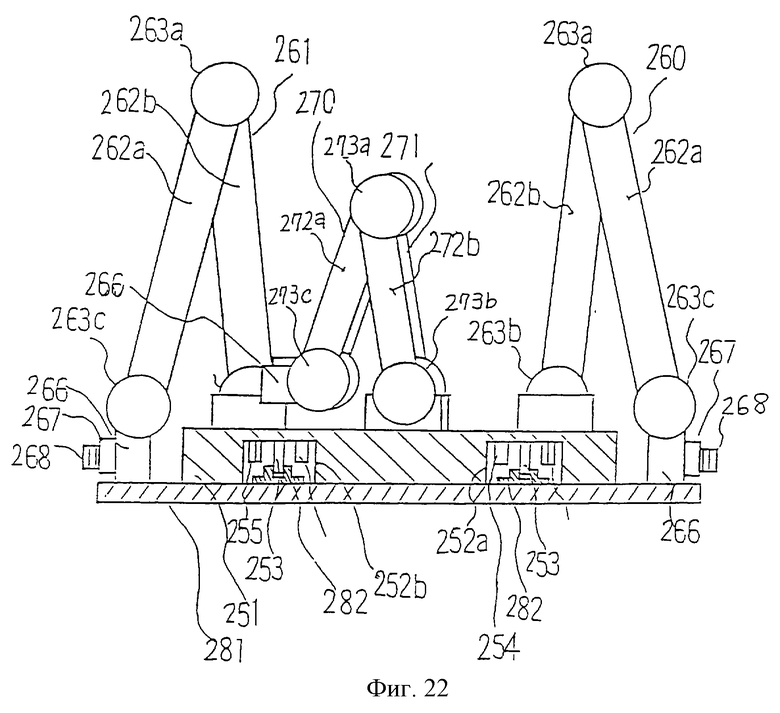
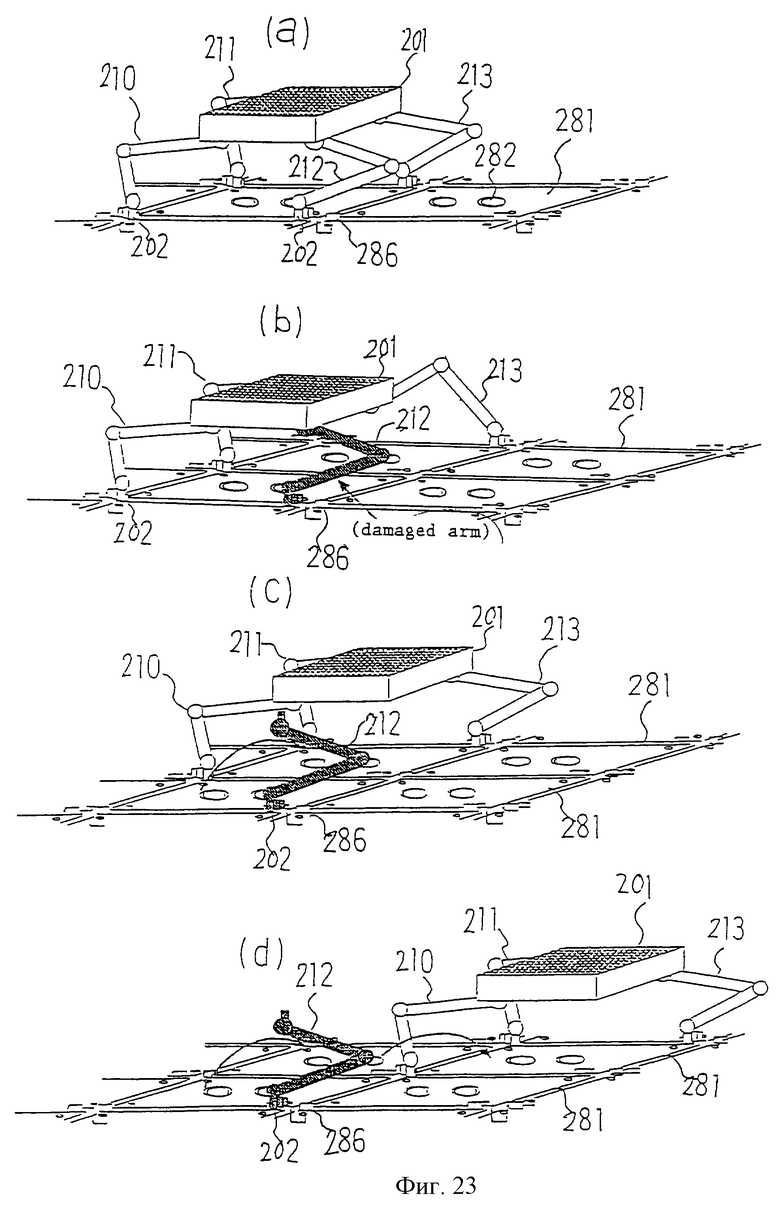
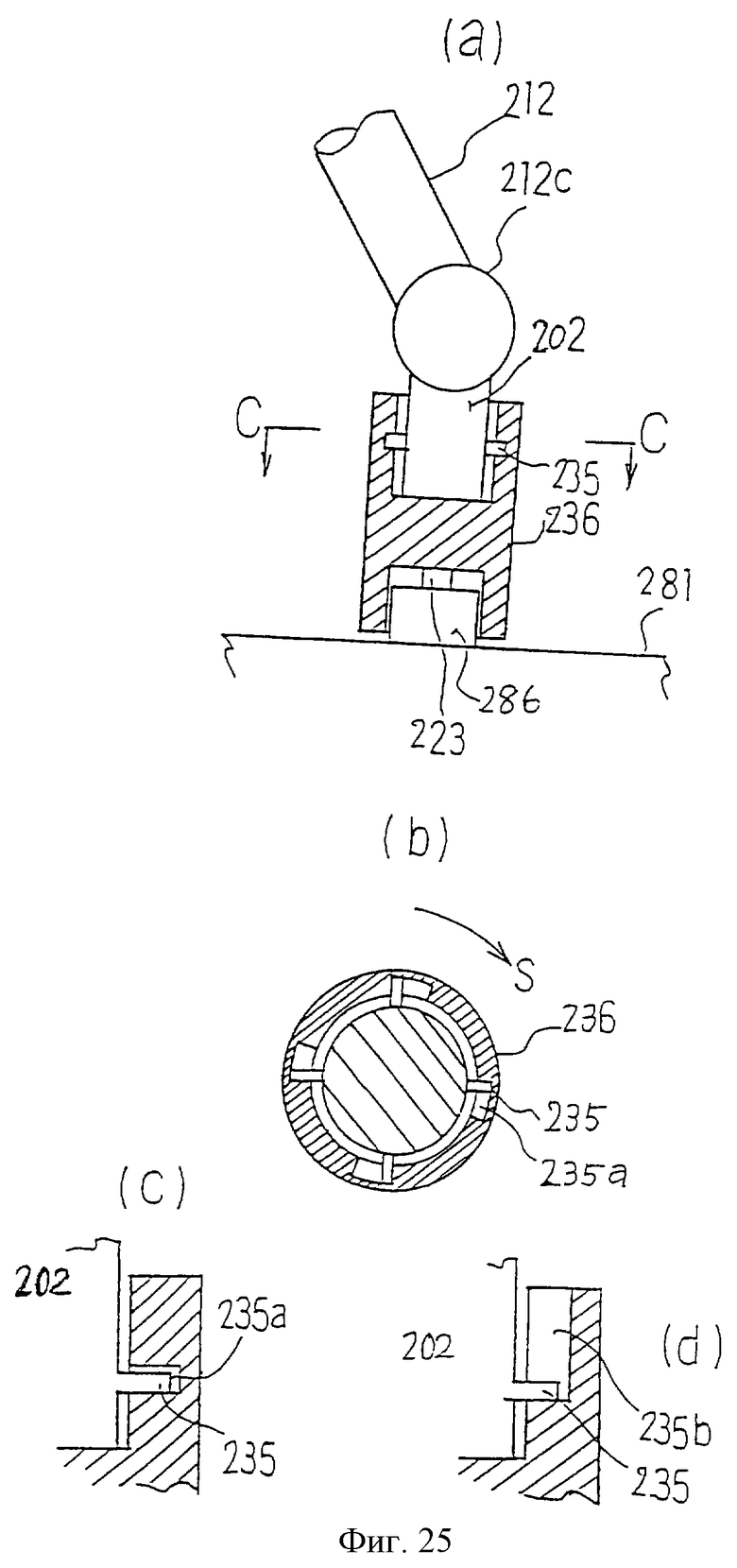
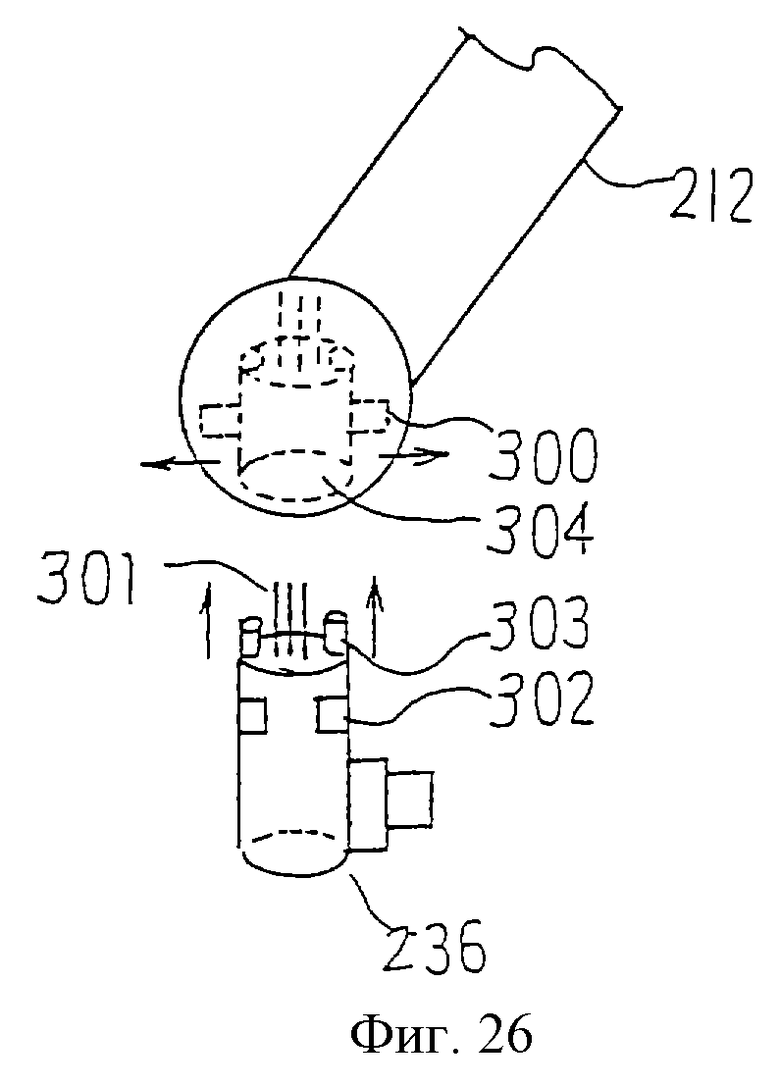
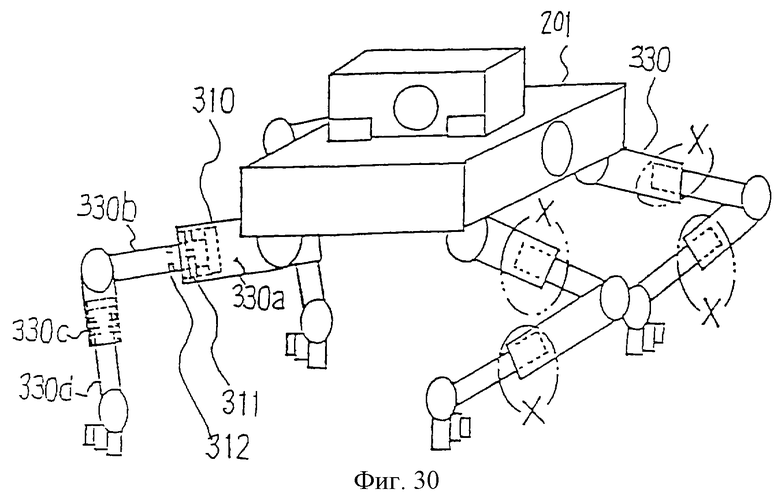
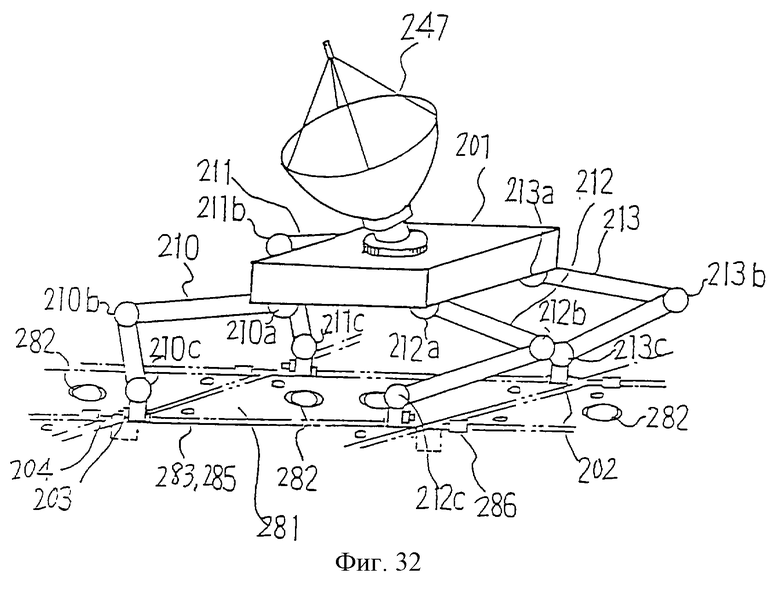
1. Робот-рабочий, содержащий корпус робота и, по меньшей мере, одно устройство рук, включающее в себя множество элементов рук, шарнирно сочлененных в своих концевых частях, прикрепленных с возможностью поворота одними своими концами к корпусу робота, имеет манипуляционный инструмент, соединенный с другими его концами, и выполнено в виде выдвигаемого и втягиваемого устройства, отличающийся тем, что устройство рук включает в себя, по меньшей мере, одну перемещающую руку и одну многофункциональную руку, а упомянутая перемещающая рука перемещает корпус робота с помощью манипуляционного инструмента, захватывающего головку болта для прикрепления прикрепляемого элемента, который прикрепляется к поверхности конструкции либо для удаления этого болта и завинчивания другого болта с помощью выдвижения, либо втягивания самой перемещающей руки.2. Робот-рабочий по п.1, отличающийся тем, что корпус робота и многофункциональная рука выполнены с возможностью подъема прикрепляемого элемента с помощью корпуса робота, крепящего крепежный элемент к прикрепляемому элементу на нижней поверхности корпуса робота, и с помощью многофункциональной руки, крепящей манипуляционный инструмент к прикрепляемому элементу, подлежащему замене.3. Робот-рабочий по п.2, отличающийся тем, что корпус робота и многофункциональная рука оснащены переходными приспособлениями поршневого типа, такими, как крепежный элемент и манипуляционный инструмент, а упомянутая конструкция оснащена гнездами для сцепления с этими переходными приспособлениями.4. Робот-рабочий по п.1, отличающийся тем, что перемещающая рука оснащена в ее манипуляционном инструменте лампой и съемочной камерой.5. Робот-рабочий по п.1, отличающийся тем, что многофункциональная рука оснащена лампой и съемочной камерой для определения положения многофункциональной руки и состояния грунта.6. Робот-рабочий по п.2, отличающийся тем, что многофункциональные руки оснащены в своих манипуляционных инструментах болтовертами для болтов упомянутого прикрепляемого элемента.7. Робот-рабочий по п.2, отличающийся тем, что многофункциональные руки оснащены в своих манипуляционных инструментах кистевыми захватами для захвата поручней, прикрепленных к конструкции.8. Робот-рабочий, содержащий корпус робота и, по меньшей мере, одно устройство рук, включающее в себя множество элементов рук, шарнирно сочлененных в своих концевых частях, прикрепленных с возможностью поворота на одном его конце к корпусу робота, и имеет манипуляционный инструмент, соединенный с другими его концами, и выполнено в виде выдвигаемого и втягиваемого устройства, отличающийся тем, что устройство рук включает в себя множество многофункциональных рук, а эти многофункциональные руки перемещают упомянутый корпус робота с помощью манипуляционных инструментов, захватывающих гнезда или головки болтов, выступающие из поверхности конструкции, и с помощью выдвижения или втягивания самих упомянутых многофункциональных рук для перевода захватов к другим гнездам или головкам болтов.9. Робот-рабочий по п.8, отличающийся тем, что прикрепленный элемент, подлежащий замене, когда прикреплен к поверхности конструкции, выполнен с возможностью подъема с помощью одной из упомянутых многофункциональных рук, крепящих упомянутый манипуляционный инструмент к прикрепленному элементу, подлежащему замене, и с помощью упомянутых манипуляционных инструментов остальных многофункциональных рук захватывает гнезда или головки болтов прикрепляемого элемента, отличного от прикрепленного элемента, подлежащего замене.10. Робот-рабочий по п.8, отличающийся тем, что многофункциональная рука оснащена лампой и съемочной камерой для определения положения многофункциональной руки и состояния грунта.11. Робот-рабочий по п.8, отличающийся тем, что манипуляционные инструменты оснащены на своих передних концах лампами и съемочными камерами.12. Робот-рабочий по п.9, отличающийся тем, что многофункциональные руки оснащены в манипуляционных инструментах переходными приспособлениями поршневого типа, а упомянутая конструкция оснащена гнездами для сцепления с этими переходными приспособлениями.13. Робот-рабочий по п.9, отличающийся тем, что многофункциональные руки оснащены в своих манипуляционных инструментах болтовертами для болтов упомянутого прикрепляемого элемента.14. Робот-рабочий по п.9, отличающийся тем, что многофункциональные руки оснащены в своих манипуляционных инструментах кистевыми захватами для захвата поручней, прикрепленных к конструкции.15. Робот-рабочий, содержащий корпус робота и, по меньшей мере, одно устройство рук, включающее в себя множество элементов рук, шарнирно сочлененных в своих концевых частях, прикрепленных с возможностью поворота на одном его конце к корпусу робота, и имеет манипуляционный инструмент, соединенный с другими его концами, и выполнено в виде выдвигаемого и втягиваемого устройства, отличающийся тем, что устройство рук включает в себя, по меньшей мере, одну перемещающую руку и многофункциональную руку, при этом нижняя поверхность корпуса робота и манипуляционный инструмент перемещающей руки оснащены бурами или долотами, вставляемыми в грунт и закрепляемыми в нем, а перемещающая рука выполнена с возможностью перемещения корпуса робота, когда корпус робота не закреплен на грунте, с помощью выдвижения или втягивания самой перемещающей руки и ввинчивания буров или долот в грунт, с последующим закреплением корпуса робота на грунте с помощью буров или долот и извлечением буров или долот перемещающей руки из грунта после закрепления корпуса робота.16. Робот-рабочий по п.15, отличающийся тем, что перемещающая рука оснащена в своем манипуляционном инструменте переходным приспособлением в виде колеса вместо упомянутых буров или долот, так что она может осуществлять перемещение с помощью колеса.17. Робот-рабочий по п.15, отличающийся тем, что перемещающая рука оснащена в ее манипуляционном инструменте лампой и съемочной камерой.18. Робот-рабочий по п.15, отличающийся тем, что многофункциональная рука оснащена лампой и съемочной камерой для определения положения многофункциональной руки и состояния грунта.19. Робот-рабочий, содержащий корпус робота и, по меньшей мере, одно устройство рук, включающее в себя множество элементов рук, шарнирно сочлененных в своих концевых частях, прикрепленных с возможностью поворота на одном его конце к корпусу робота, и имеет манипуляционный инструмент, соединенный с другими его концами, и выполнено в виде выдвигаемого и втягиваемого устройства, отличающийся тем, что устройство рук включает в себя множество многофункциональных рук, а эти многофункциональные руки оснащены в их манипуляционных инструментах бурами или долотами, вставляемыми в грунт и закрепляемыми в нем, и упомянутые многофункциональные руки выполнены с возможностью перемещения упомянутого корпуса робота, когда упомянутый корпус робота не закреплен на грунте, с помощью выдвижения или втягивания самих многофункциональных рук и ввинчивания упомянутых буров или долот в грунт, с последующим закреплением корпуса робота на грунте с помощью буров или долот и извлечением буров или долот многофункциональных рук из грунта после закрепления корпуса робота.20. Робот-рабочий по п.19, отличающийся тем, что многофункциональные руки оснащены в своих манипуляционных инструментах переходными устройствами в виде колес вместо буров или долот, так что они могут осуществлять перемещение с помощью колес.21. Робот-рабочий по п.19, отличающийся тем, что манипуляционные инструменты оснащены на своих передних концах лампами и съемочными камерами.22. Робот-рабочий по п.19, отличающийся тем, что многофункциональная рука оснащена лампой и съемочной камерой для определения положения многофункциональной руки и состояния грунта.23. Робот-рабочий, содержащий корпус робота и, по меньшей мере, одно устройство рук, включающее в себя множество элементов рук, шарнирно сочлененных в своих концевых частях, прикрепленных с возможностью поворота на одном его конце к корпусу робота, и имеет манипуляционный инструмент, соединенный с другими его концами, и выполнено в виде выдвигаемого и втягиваемого устройства, отличающийся тем, что устройство рук перемещает корпус робота с помощью манипуляционного инструмента, захватывающего гнезда или головки болтов, выступающие из поверхности конструкции, и с помощью выдвижения или втягивания самого устройства рук для перевода захватов к другим гнездам или головкам болтов, и устройство рук выполнено с возможностью захвата, переноса и передачи прикрепляемого элемента, который прикрепляется к поверхности конструкции, с помощью своего манипуляционного инструмента.24. Робот-рабочий по п.23, отличающийся тем, что прикрепляемая часть каждого устройства рук соединена с корпусом робота таким образом, что устройство рук можно удалять во время работы.25. Робот-рабочий по п.23, отличающийся тем, что к поверхности корпуса робота прикреплено множество видеодатчиков.26. Робот-рабочий по п.23, отличающийся тем, что к переднему концу каждого устройства рук прикреплено переходное приспособление для захвата гнезд или головок болтов, выступающих из поверхности конструкции, и это переходное приспособление можно удалять с переднего конца устройства рук во время работы.27. Робот-рабочий по п.23, отличающийся тем, что на верхней поверхности корпуса робота установлен опираемый элемент произвольной формы, и на этой верхней поверхности упомянутого корпуса робота может быть установлено опорное устройство, которое выполнено с возможностью перемещения в соответствии с контуром ширины упомянутого опираемого элемента для опирания упомянутого опираемого элемента путем выталкивания и крепления на двух его сторонах.28. Робот-рабочий по п.23, отличающийся тем, что на верхней поверхности упомянутого корпуса робота может быть установлен опираемый элемент произвольной формы, и этот опираемый элемент опирается своей нижней поверхностью на верхнюю поверхность упомянутого корпуса робота с помощью переходного приспособления.29. Робот-рабочий по п.23, отличающийся тем, что каждое устройство рук может свободно выдвигаться или втягиваться в его отдельных сочленениях, а прикрепляемая часть устройства рук на корпусе робота может выдвигаться на заданную длину для регулировки его положения.30. Робот-рабочий по п.23, отличающийся тем, что каждое устройство рук оснащено между его сочленениями выдвигаемым механизмом для изменения диапазона перемещения, диапазона захвата и скорости перемещения.31. Робот-рабочий по п.23, отличающийся тем, что к корпусу робота и к периферии каждого устройства рук прикреплены модули солнечных батарей, так что отдельные части корпуса робота, даже когда они отделены от корпуса робота, могут быть приведены в движение с помощью их собственных связей.32. Робот-рабочий по п.23, отличающийся тем, что на верхней поверхности упомянутого корпуса робота установлена антенна.33. Робот-рабочий по п.23, отличающийся тем, что корпус робота изготовлен в виде конструкции, складываемой вдвое с получением полукорпусов путем поворота в ее центре.
Приоритет по пунктам:
10.03.1999 по пп.1-7 и 15-18;25.08.1999 по пп.8-14 и 19-22;29.10.1999 по пп.23-33.