Область техники, к которой относится изобретение
Настоящее изобретение относится к функциональному узлу для промышленной установки, такой как робот, типа, содержащего:
- опорную раму, содержащую фланец для прикрепления к запястью робота или к другому элементу промышленной установки,
- рабочий блок, например, захватное устройство или рабочий инструмент, поддерживаемый упомянутой опорной рамой,
- защитный кожух для упомянутого рабочего блока, размещенный на упомянутой опорной раме и образующий объем ограничения,
- при этом упомянутый функциональный узел выполнен с возможностью принятия первой рабочей конфигурации, в которой упомянутый защитный кожух окружает и покрывает упомянутый рабочий блок, и второй рабочей конфигурации, в которой упомянутый рабочий блок расположен, по меньшей мере частично, снаружи объема ограничения упомянутого защитного кожуха.
Уровень техники
Функциональный узел вышеупомянутого типа описан и показан в документе WO 2017/036690 А1. В известном устройстве этого документа рабочий блок в виде захватного устройства размещен на запястье многоосевого манипуляционного робота. Захватное устройство окружено защитным кожухом и может перемещаться между извлеченным положением для захвата предмета и отведенным положением, в котором оно размещено внутри защитного кожуха.
В последнее время широко используются промышленные роботы так называемого "коллаборативного" типа, выполненные с возможностью работы в открытой, не загороженной среде, в которой также находятся операторы, выполняющие ручные операции. Разумеется, роботы этого типа должны обеспечивать необходимую степень безопасности для операторов, по этой причине они оснащены системами датчиков, способными обнаруживать, когда части робота находятся слишком близко или контактируют с инородным телом, и, в частности, с оператором, находящимся в той же рабочей зоне.
Таким образом, существует потребность в распространении тех же критериев безопасности на рабочие органы, размещенные на коллаборативных роботах. Известное вышеупомянутое решение является примером попытки улучшения в этом направлении, однако оно не является полностью удовлетворительным с точки зрения безопасности, функциональности и конструктивной простоты.
Функциональные узлы вышеупомянутого типа также раскрыты в DE 20 2013 105501 U1, DE 10 2012 217764 А1 и WO 2017/158120 А1.
Проблемы, на решение которых направлено изобретение
Проблема, на решение которой направлено настоящее изобретение, заключается в создании функционального узла вышеупомянутого типа, обладающего очень высокой степенью безопасности в отношении его использования в открытой среде, доступной для операторов, которые должны выполнять ручные операции в той же рабочей зоне.
Другая проблема, на решение которой направлено настоящее изобретение, заключается в создании функционального узла вышеупомянутого типа, на эксплуатационные характеристики которого не влияет размер защитного кожуха, которым он оснащен.
Предпочтительной задачей настоящего изобретения является решение вышеупомянутых проблем с помощью относительно простой, легкой и недорогой конструкции.
Раскрытие сущности изобретения
Для решения одной или нескольких вышеупомянутых проблем, настоящее изобретение относится к функциональному узлу для промышленной установки, в частности для робота, причем упомянутый функциональный узел содержит:
- опорную раму, содержащую фланец для крепления к запястью робота или к другим элементом промышленной установки,
- рабочий блок, например, захватное устройство или рабочий инструмент, поддерживаемый упомянутой опорной рамой,
- защитный кожух для упомянутого рабочего блока, образующий объем ограничения,
- при этом упомянутый функциональный узел выполнен с возможностью принятия первой рабочей конфигурации, в которой упомянутый защитный кожух окружает и покрывает упомянутый рабочий блок, и второй рабочей конфигурации, в которой упомянутый рабочий блок расположен, по меньшей мере частично, снаружи объема ограничения упомянутого защитного кожуха,
причем упомянутый защитный кожух имеет фиксированную часть и часть, выполненная подвижной вдоль основного направления относительно фиксированной части, при этом упомянутая подвижная часть защитного кожуха выполнена подвижной между опущенным положением, в котором она окружает и полностью покрывает упомянутый рабочий блок, и поднятым положением, в котором упомянутый рабочий блок непокрыт,
причем:
- фиксированная часть защитного кожуха жестко соединена с упомянутой опорной рамой, обеспечивающей опору для рабочего блока,
- подвижная часть защитного кожуха расположена снаружи фиксированной части и подвижно установлена на упомянутой опорной раме,
- как фиксированная часть, так и подвижная часть упомянутого защитного кожуха имеют коллаборативную внешнюю конструкцию, оснащенную датчиками близости и/или контактными датчиками так, чтобы обеспечить возможность использования функционального узла совместно и в непосредственной близости с одним или более людьми-операторами.
В настоящем описании и в прилагаемой формуле изобретения выражение "коллаборативная внешняя конструкция" используется для обозначения стенки или кожуха, оснащенных датчиками близости и/или контактными датчиками любого типа, обеспечивающими возможность использования функционального узла совместно и в непосредственной близости с одним или более людьми-операторами. Датчики могут быть выполнены с возможностью автоматического уменьшения скорости перемещения робота или автоматической остановки робота всякий раз, когда обнаруживается чрезмерная близость или контакт с инородным телом, таким как человек-оператор. Это позволяет безопасно использовать функциональный узел даже в открытой, не загороженной среде, в которой вблизи робота находятся люди-операторы.
Благодаря вышеупомянутым характеристикам функциональный узел согласно настоящему изобретению может отвечать необходимым требованиям безопасности; при этом наличие защитного кожуха не ухудшает его эксплуатационные характеристики, и он конструктивно прост и эффективен в процессе использования.
В соответствии с другой предпочтительной характеристикой, рабочий блок согласно настоящему изобретению выполнен с возможностью смещения относительно упомянутой опорной рамы по меньшей мере в одном поперечном направлении относительно упомянутого основного направления, так что упомянутый рабочий блок может быть перемещен в непосредственную близость к границам зоны обслуживания в плоскости упомянутой подвижной части защитного кожуха. Благодаря вышеупомянутым признакам защитный кожух функционального узла согласно настоящему изобретению не представляет собой ограничение на эксплуатационные характеристики функционального узла. Например, в случае, когда рабочий блок представляет собой захватное устройство, используемое для подхвата предметов из контейнера, размер защитного кожуха не препятствует захватному устройству подхватывать предметы, расположенные даже рядом со стенками контейнера. В предпочтительном варианте осуществления вышеупомянутый рабочий блок выполнен подвижным относительно упомянутой опорной рамы в двух дополнительных направлениях, перпендикулярных друг другу и перпендикулярных упомянутому основному направлению. В другом варианте осуществления упомянутый рабочий блок также выполнен с возможностью вращения относительно упомянутой опорной рамы вокруг оси, перпендикулярной к упомянутому основному направлению.
В предпочтительном варианте осуществления функциональный узел согласно настоящему изобретению предназначен для соединения с запястьем многокоординатного манипуляционного робота.
По сравнению с решением, раскрытым в WO 2017/036690 А1, в котором защитный кожух является неподвижным относительно крепежного фланца робота, и именно захватное устройство может перемещаться относительно кожуха, настоящее изобретение имеет ряд преимуществ.
Во-первых, в узле согласно настоящему изобретению основная часть, которая может перемещаться, представляет собой вышеупомянутую подвижную часть защитного кожуха, имеющую "коллаборативную" конструкцию, то есть, она оснащена датчиками, конфигурированными обнаруживать присутствие или близость оператора. Это представляет собой существенное улучшение безопасности относительно вышеупомянутого известного решения, в котором основная часть, которая может перемещаться, представляет собой захватное устройство, которое для выполнения захвата и разгрузки предметов должно выходить из кожуха. Захватное устройство, по своей природе, не может обладать коллаборативной конструкцией, поэтому оно всегда представляет опасность для операторов, находящихся в рабочей зоне.
В случае узла согласно настоящему изобретению основная часть, которая может перемещаться, обладает коллаборативной конструкцией. Кроме того, устройство может быть таким, что подвижная часть коллаборативного кожуха приводится в свое поднятое положение с открытым рабочим блоком только тогда, когда весь узел находится в недоступной для оператора зоне, например, в пределах контейнера для подхвата предметов.
Дополнительное преимущество узла согласно настоящему изобретению заключается в том, что направляющая и приводная система перемещения защитного кожуха является более простой и легкой по сравнению с направляющей и приводной системой захватного устройства. Во-вторых, настоящее изобретение позволяет обеспечить, если это необходимо, дополнительный ход подвижной части защитного кожуха вверх, так что в ее поднятом положении подвижная часть может образовывать дополнительный защитный барьер, проходящий вверх, над рабочей зоной.
Дополнительно, в случае применения захвата предметов в контейнере, размеры и вертикальный ход подвижной части защитного кожуха предпочтительно выбирают в соответствии с размером захватываемых предметов таким образом, чтобы при подхвате предметы кожух может быть опущен в положение, в котором подхваченный предмет находится внутри защитного кожуха. Таким образом, когда робот перемещает функциональный узел наружу контейнера для подхвата частей, подхваченный предмет не может служить источником опасности для операторов в рабочей зоне.
Настоящее изобретение также относится к роботу или промышленной установке, содержащей вышеописанный функциональный узел, причем упомянутый робот или промышленная установка содержит контроллер, при этом упомянутый контроллер конфигурирован для получения сигналов от упомянутых датчиков близости и/или контактных датчиков защитного кожуха, чтобы автоматически уменьшать скорость перемещения упомянутого робота или промышленной установки или автоматически останавливать упомянутый робот или промышленную установку всякий раз, когда обнаружена чрезмерная близость или контакт с инородным телом, таким как человек-оператор.
Осуществление изобретения
Дополнительные признаки и преимущества изобретения будут очевидны из приведенного ниже описания со ссылками на прилагаемые чертежи, приведенные исключительно в качестве неограничивающего примера, где:
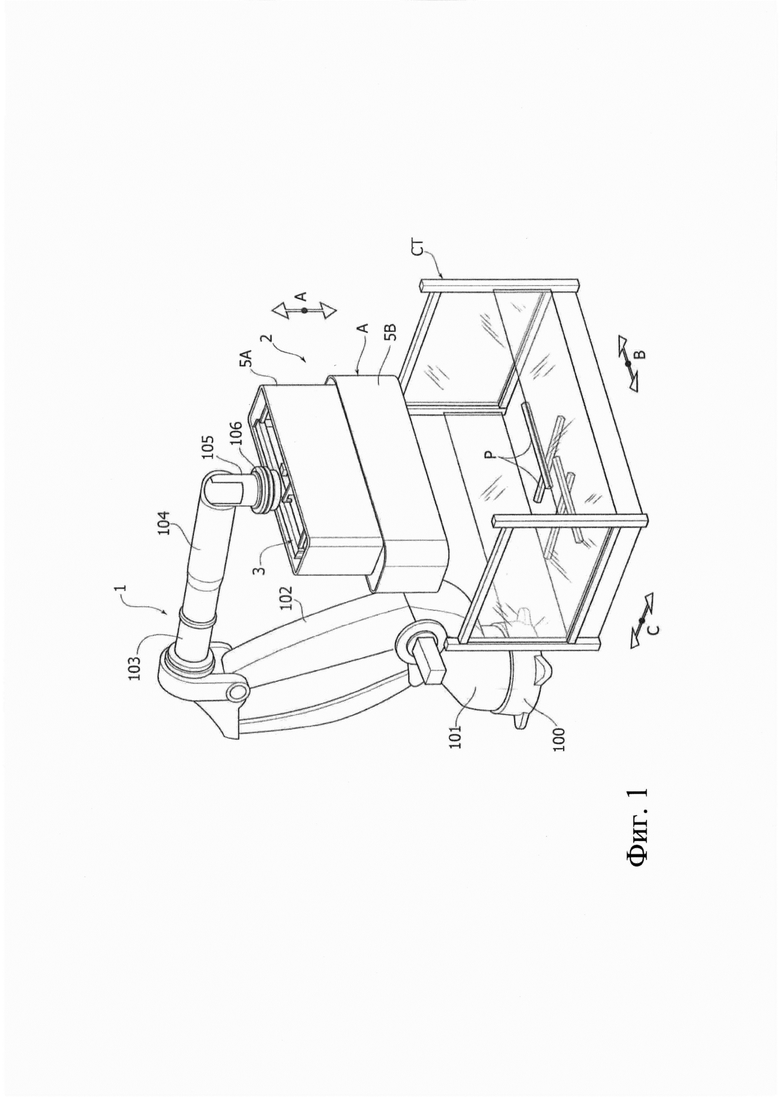
- на фиг. 1 на виде в аксонометрии показан промышленный робот, содержащий функциональный узел согласно настоящему изобретению, в первом рабочем состоянии,
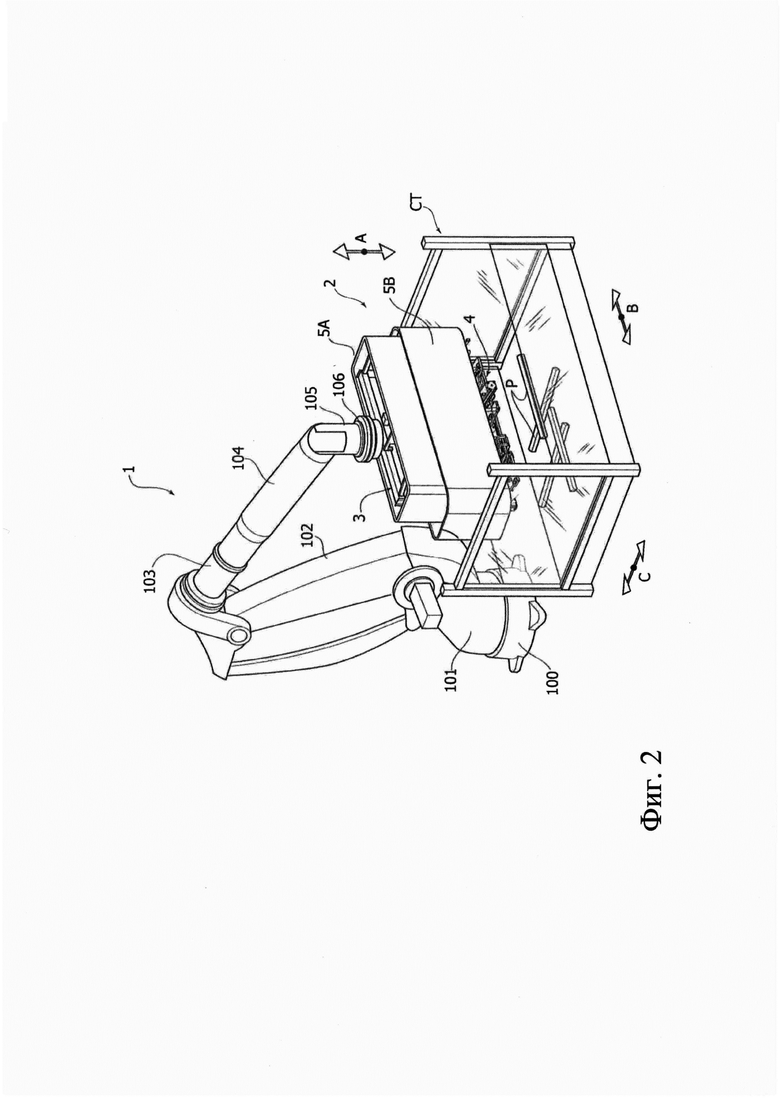
- на фиг. 2 на виде в аксонометрии показан робот с фиг. 1 во втором рабочем состоянии,
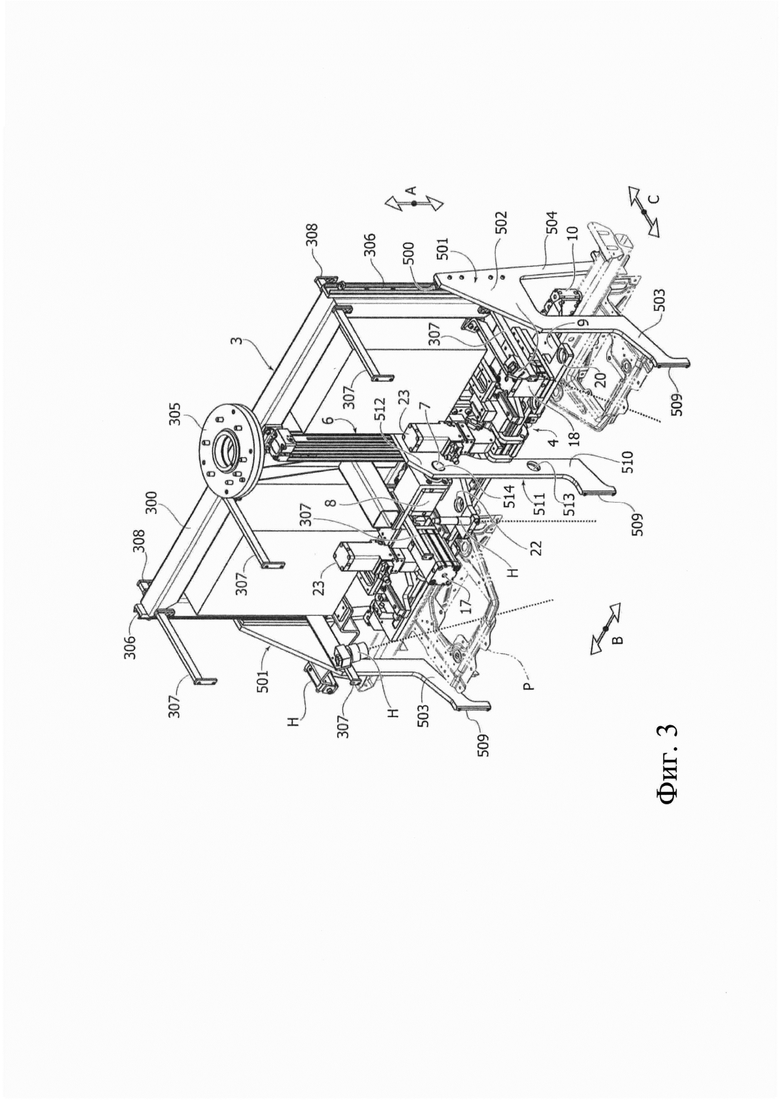
- на фиг. 3 на виде спереди в аксонометрии показан вариант осуществления функционального узла согласно настоящему изобретению, в котором защитный кожух был удален,
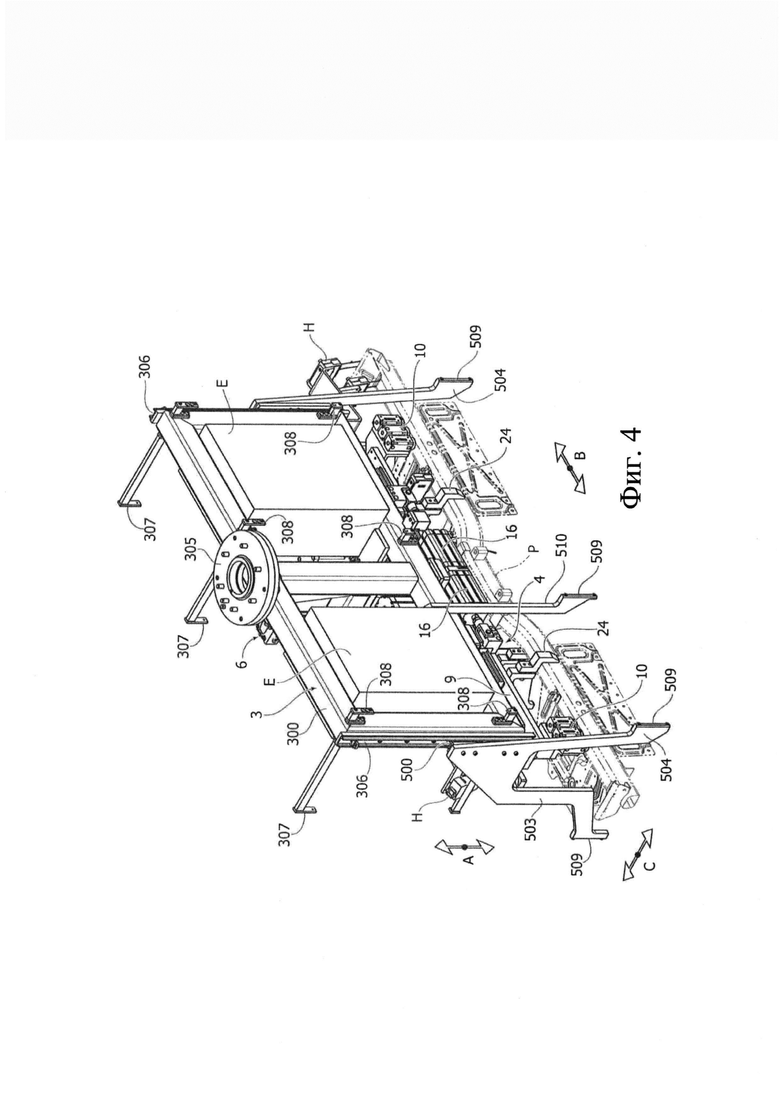
- на фиг. 4 на виде сзади в аксонометрии показан функциональный узел с фиг. 3, в котором защитный кожух был удален,
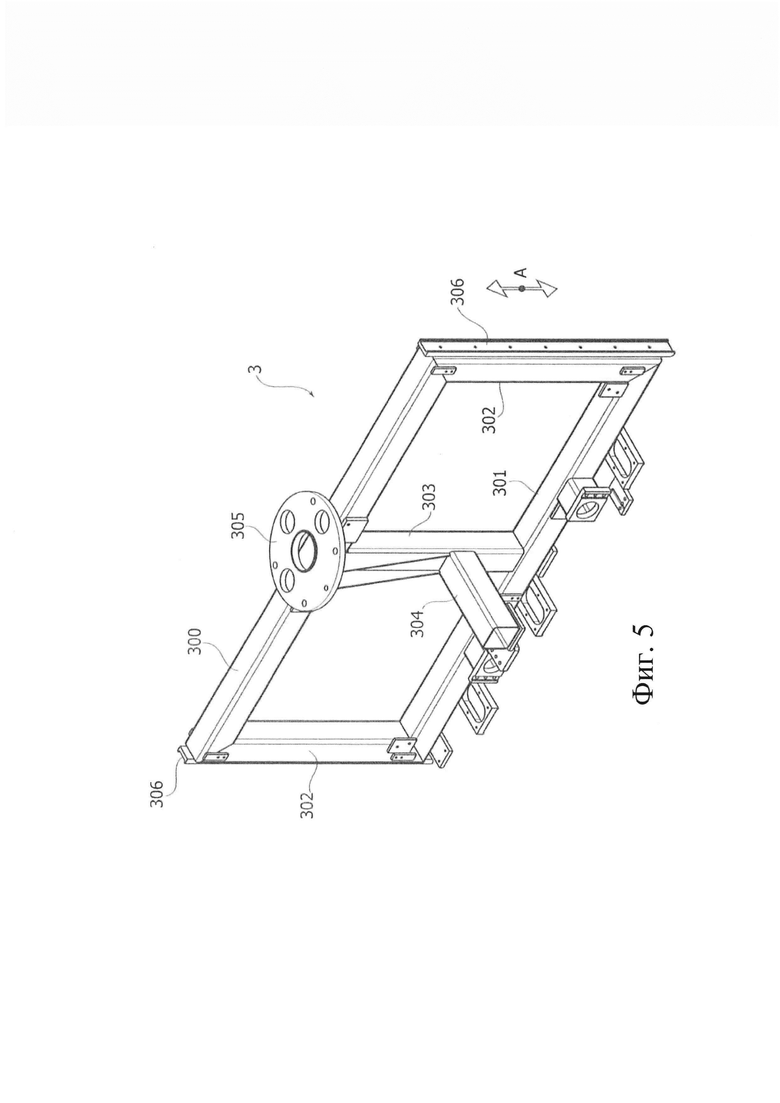
- на фиг. 5 на виде в аксонометрии показана опорная рама, образующая часть функционального узла с фиг. 3,
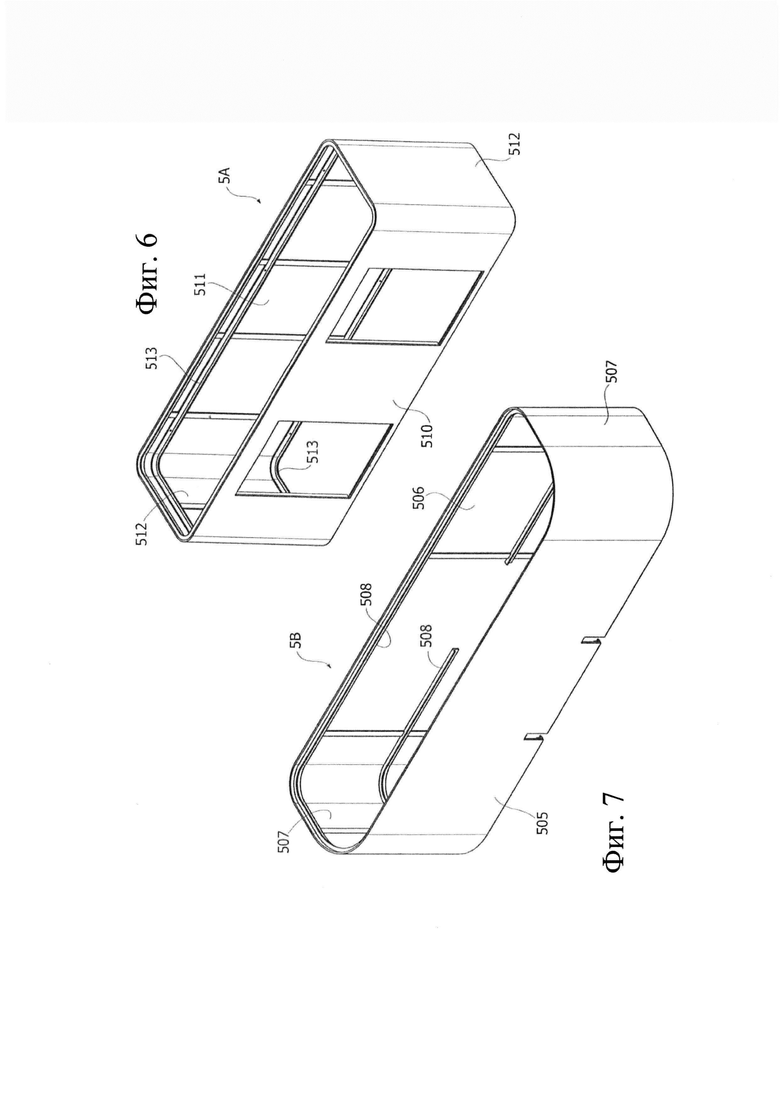
- на фиг. 6, 7 на видах в аксонометрии показана фиксированная часть и подвижная часть защитного кожуха, содержащего функциональный узел с фиг. 3,
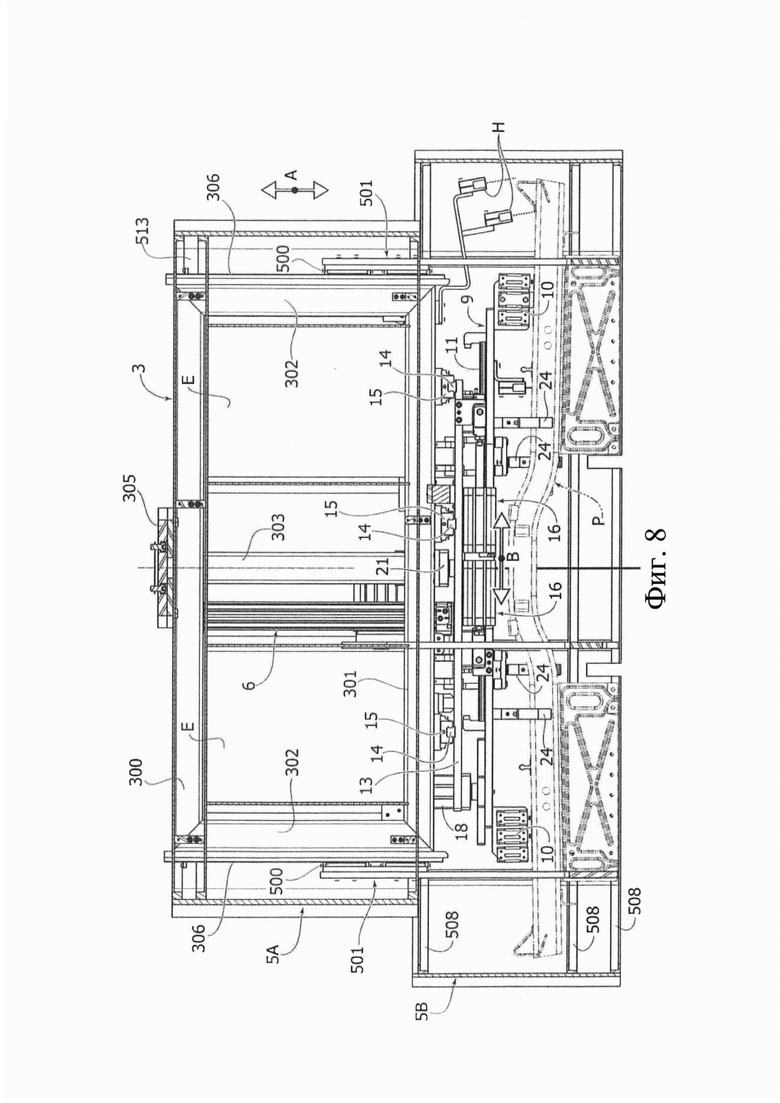
- на фиг. 8 в вертикальной проекции с частичным разрезом показан функциональный узел с фиг. 3, причем также показана фиксированная часть и подвижная часть защитного кожуха,
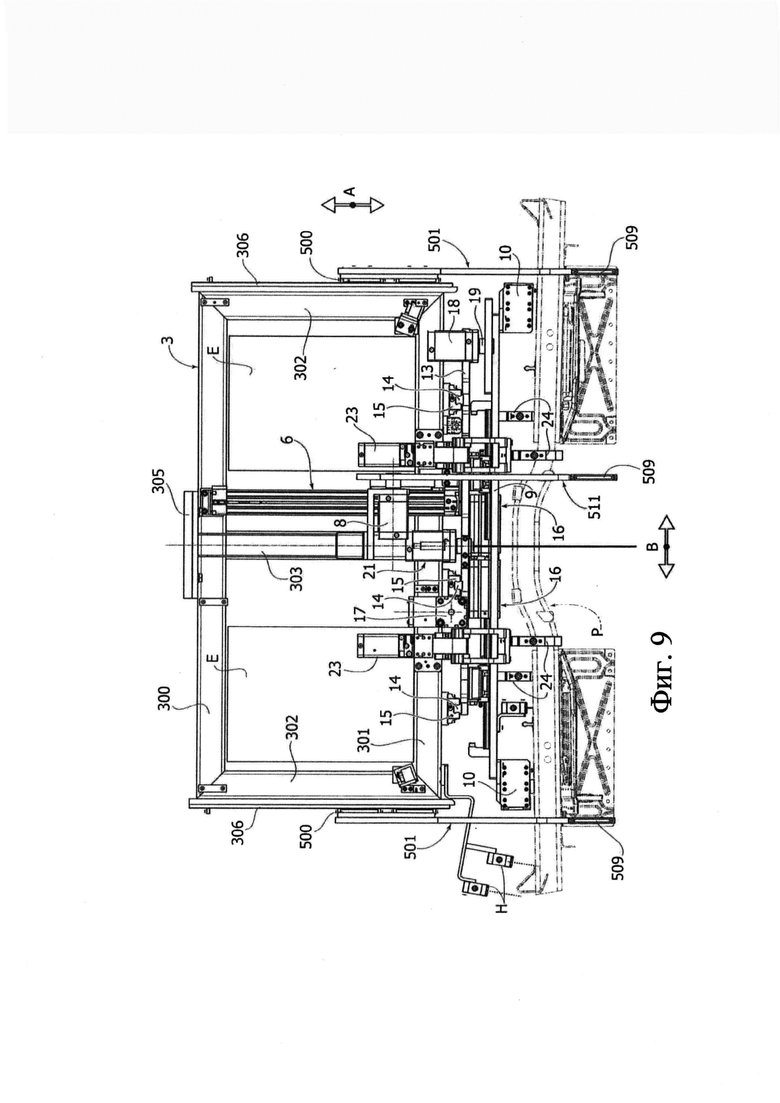
- на фиг. 9 в вертикальной проекции сзади с частичным разрезом показан функциональный узел с фиг. 3, на котором защитный кожух был удален,
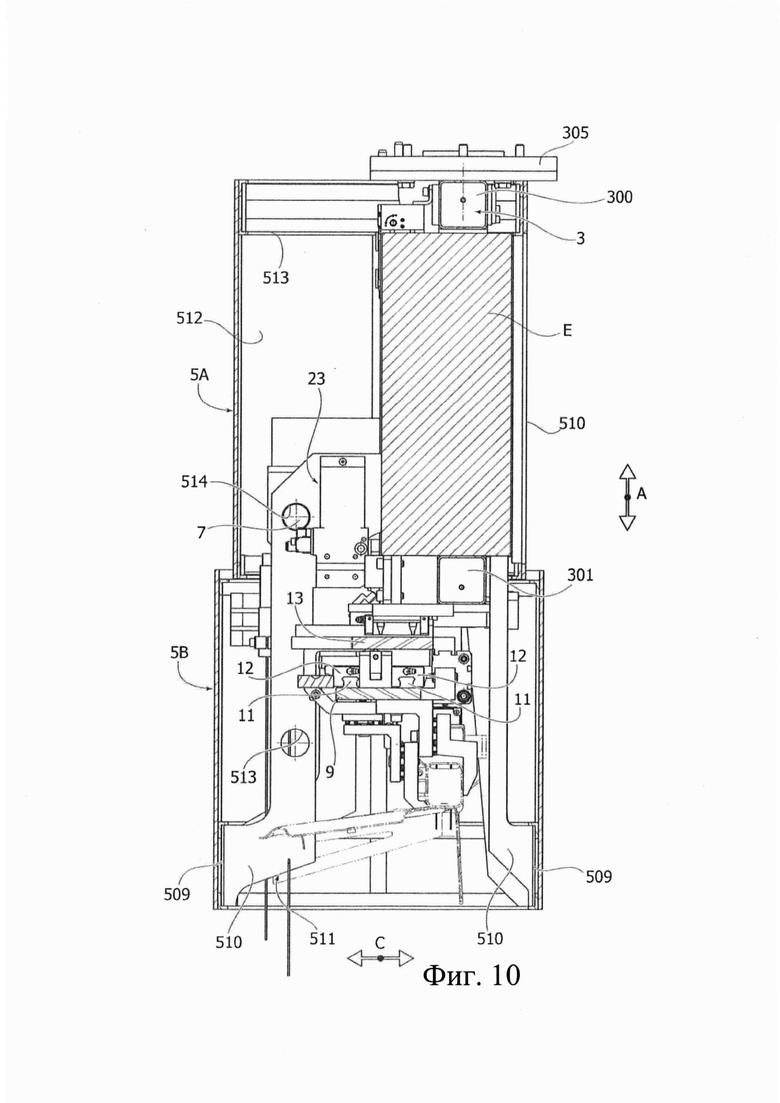
- на фиг. 10 на виде сбоку в поперечном разрезе показан функциональный узел с фиг. 3, причем также показана фиксированная часть и подвижная часть защитного кожуха,
- на фиг. 11, 12А, 12В, 13 схематично проиллюстрирован принцип работы вариантов осуществления настоящего изобретения, и
- на фиг. 14-16 показаны схемы, демонстрирующие преимущества настоящего изобретения.
На чертежах показан пример функционального узла согласно настоящему изобретению, оснащенный рабочим блоком в виде захватного устройства, соединенным с запястью многоосевого манипуляционного робота и пригодного для захвата предметов Р, расположенных в контейнере СТ.
На фиг. 1, 2 номер позиции 1 обозначает, в целом, многоосевый манипуляционный робот, содержащий основание 100 и цепь элементов 101, 102, 103, 104 робота, взаимно сочлененных друг с другом, заканчивающуюся запястьем 105 робота, содержащим фланец 106 для присоединения функционального узла согласно настоящему изобретению.
Разумеется, конструкция и конфигурация робота 1 могут быть любого известного типа. По этой причине конструктивные предметы робота 1, такие как двигатели, обеспечивающие перемещение различных элементов робота, и электронная система управления робота, не описаны в данном документе и не показаны, в том числе потому, что удаление этих предметов из чертежей делает их более ясными и легко понятными.
Следует также отметить, что функциональный узел согласно настоящему изобретению также может быть использован на промышленной установке, отличной от многоосевого манипуляционного робота, такой как, декартовый манипуляционный робот, или на установке любого другого типа с возможностью перемещения рабочего инструмента.
Функциональный узел согласно настоящему изобретению, в целом, обозначен на фиг. 1, 2 номером позиции 2. Функциональный узел содержит опорную раму 3, жестко связанную с крепежным фланцем 106 запястья 105 робота. Опорная рама 3 поддерживает рабочий блок, обозначенный в целом номером позиции 4 (см. также фиг. 3, 4) и представляющий собой в показанном варианте осуществления захватное устройство. Понятно, что настоящее изобретение применимо к "рабочему органу" любого другого типа, например, к сварочной головке, головке сшивателя или к инструменту или устройству любого другого типа, включая оптико-электронные устройства наблюдения.
Захватное устройство 4 окружено и покрыто защитным кожухом, обозначенном на фиг. 1, 2 в целом номером позиции 5. Кроме того, согласно настоящему изобретению защитный кожух 5 содержит фиксированную часть 5А, жестко соединенную с опорной рамой 3, и подвижную часть 5В, выполненную подвижной относительно фиксированной части 5А снаружи ее в основном направлении А (фиг. 1,2).
Согласно предпочтительному варианту осуществления, обе части 5А, 5В защитного кожуха 5 имеют оснащенную датчиками наружную конструкцию, содержащую датчики, например емкостного и/или пьезорезистивного типа, конфигурированные для обнаружения близости и/или контакта с инородным телом. Детали конфигурации и расположения этих датчиков не описаны и не показаны в данном документе, поскольку они могут быть любого известного типа.
Однако в предпочтительном варианте осуществления каждая из частей 5А, 5В защитного кожуха имеет конструкцию типа, раскрытого в европейской патентной заявке ЕР 3246137 А1, поданной тем же заявителем и все еще секретной на дату приоритета настоящего изобретения. Согласно решениям, предложенным в этой патентной заявке, кожух со встроенными датчиками содержит множество активных слоев и пассивных слоев, включающих в себя:
- опорную конструкцию из жесткого или полужесткого материала (например, из металлического или пластикового материала), имеющую заданную форму,
- амортизирующий слой, выполненный из упруго-пластичного материала и связанный с наружной стороной опорной конструкции,
- пьезорезистивный контактный датчик над амортизирующим слоем, содержащий пьезорезистивный слой, расположенный между нижним электропроводящим слоем и верхним электропроводящим слоем,
- нижний покрывающий слой и верхний покрывающий слой, выполненные из электроизолирующего материала, между которыми расположен пьезорезистивный контактный датчик,
- емкостный датчик близости, расположенный над пьезорезистивным контактным датчиком и содержащий первый электропроводящий слой и второй электропроводящий слой, между которыми расположен промежуточный слой из электроизолирующего материала,
наружный слой конструкции над емкостным датчиком близости, предпочтительно выполненный с электроизолирующим материалом.
Благодаря такому конструктивному исполнению защитного кожуха 5 с конструкцией со встроенными датчиками, система управления робота обеспечена возможностью автоматически останавливать робота всякий раз при обнаружении чрезмерной близости или контакта с инородным телом. Это позволяет безопасно использовать функциональный узел даже в открытой, не загороженной среде, в которой вблизи робота находятся операторы.
Подразумевается, что для приложений такого типа робот 1, на котором размещен функциональный узел, также предпочтительно представляет собой робот коллаборативного типа, то есть, он конфигурирован для безопасной работы в среде, к которой имеют доступ операторы. Для этой цели эти роботы обычно оснащены кожухами, окружающими подвижные элементы робота и имеющими оснащенную датчиками наружную поверхность.
Подвижная часть 5В защитного кожуха 5 функционального узла согласно настоящему изобретению выполнена подвижной между опущенным положением, в котором захватное устройство 4 полностью покрыто и окружено защитным кожухом 5, и поднятым положением (фиг. 2), в котором захватное устройство выступает под кожухом 5 так, что оно может захватывать предмет Р внутри контейнера СТ без того, чтобы кожух 5 создавал помехи для захваченной предметы Р.
Подразумевается, что в настоящем описании и в приложенной формуле изобретения термины "поднятый" и "опущенный" используются со ссылкой на вертикальную ориентацию основного направления А. Очевидно, что если робот ориентирует функциональный узел для изменения основного направления А так, чтобы оно больше не было вертикальным, перемещение подвижного кожуха, тем не менее, следует по направлению А, при этом подвижная часть 5В, однако, может перемещаться между крайним покрытым положением устройства 4 и противоположным крайним положением, в котором устройство 4 непокрыто.
В процессе использования подвижная нижняя часть 5В защитного кожуха 5 поднимается только тогда, когда функциональный узел 2 перемещается внутри контейнера СТ, поскольку при этом исключен контакт между захватным устройством 4 и инородным телом (в частности, оператором, находящимся вблизи контейнера СТ). Подвижная часть 5В удерживается вместо этого в опущенном положении, когда функциональный узел 2 перемещается роботом 1 в зону снаружи контейнера СТ для обеспечения необходимой безопасности операторов, находящихся в этой же зоне.
По сравнению с решением, раскрытым в WO 2017/036690 А1, в котором защитный кожух является неподвижным относительно крепежного фланца робота и именно захватное устройство может перемещаться в основном направлении А, настоящее изобретение имеет ряд преимуществ. Во-первых, направляющая и приводная система перемещения защитного кожуха является более простой и легкой, чем направляющая и приводная система захватного устройства. Во-вторых, настоящее изобретение обеспечивает возможность расположения в случае необходимости дополнительного хода вверх (как показано на фиг. 1, 2) подвижной части защитного кожуха таким образом, что в ее поднятом положении подвижная часть создает защитный барьер над стенками контейнера.
Кроме того, как раскрыто более подробно ниже, система согласно настоящему изобретению обеспечивает предпочтительный вариант осуществления, в котором рабочий блок 4 (в показанном примере, захватное устройство 4) также выполнен подвижным по меньшей мере в одном направлении, перпендикулярном основному направлению А, так что, когда подвижная часть 5В защитного кожуха поднимается, рабочий блок 4 может быть перемещен за пределы проекции объема ограничения подвижной части защитного кожуха. Таким образом, эксплуатационные характеристики рабочего блока не уменьшаются из-за размера защитного кожуха. Как указано, этот аспект рассматривается более подробно ниже.
Конфигурация опорной рамы 3 в случае конкретного примера, показанного в данном документе, хорошо видна на фиг. 5, поскольку на этом чертеже показана только рама 3. Рама содержит верхнюю перекладину 300 и нижнюю перекладину 301, параллельные и отстоящие друг от друга, которые жестко соединены двумя боковыми стойками 302 и центральной стойкой 303, от которой выступает нависающая часть 304 балки. Дополнительно со ссылкой на показанный конкретный пример, все элементы 300-304 выполнены в виде сварных металлических листовых элементов с прямоугольным поперечным сечением. Над центральной частью верхней перекладины 300 приварен круглый фланец 305, используемый для жесткого соединения, путем завинчивания, с фланцем 106 запястья 105 робота 1.
На сторонах двух боковых стоек 302 расположены две направляющие секции 306 для направляющего скольжения в основном направлении А подвижной части 5В защитного кожуха 5.
Как показано на фиг. 3, 4, внутри направляющих секций 306 установлены с возможностью скольжения соответствующие башмаки 500, жестко соединенные с двумя боковыми пластинами 501, опорными подвижную часть 5В защитного кожуха 5. Каждая пластина 501 проходит по существу в плоскости, перпендикулярной общей плоскости опорной рамы 3, и имеет верхнюю часть 502 с треугольным профилем, от которой выступают передний рычаг 503 и задний рычаг 504.
Подвижная часть 5В защитного кожуха 5 показана на фиг. 7. Она выполнена в виде корпуса, состоящего из листа металла или синтетического материала, навитого на себя так, чтобы образовать переднюю основную стенку 505, заднюю основную стенку 506 и две торцевые стенки 507. Стенка корпуса жестко соединена (например, путем завинчивания или склеивания) с внутренними полосами 508, закрепленными, например, путем завинчивания, на крепежных концах 509 рычагов 503, 504. Как указано выше, на опорной конструкции корпуса 5В размещен кожух со встроенными датчиками, например, имеющий слоистую конструкцию, которая была описана выше.
Корпус подвижной части 5В защитного кожуха также прикреплен к крепежному концу 509 двух рычагов 510, образующих часть пластины 511, расположенной в промежуточном положении между двумя боковыми пластинами 501. Пластина 511 также имеет верхнюю часть 512, от которой выступают два рычага 510 и которая непосредственно управляется приводом 6, выполненным для приведения в действие перемещения подвижной части 5В защитного кожуха вдоль основного направления А. Привод 6 может быть любого известного типа, например, он может быть гидравлическим приводом или электрическим приводом. Основная часть привода 6 поддерживается рамой 3, имеющей концы, жестко соединенные с верхней перекладиной 300 и с нижней перекладиной 301 рамы 3.
В показанном примере привод 6 представляет собой пневматический линейный привод безштокового типа, содержащий наружный корпус фиксированной длины и боковой паз, из которого выступает подвижный элемент, жестко соединенный с верхней частью промежуточной пластины 512. Конструктивные детали привода 6 не раскрыты в данном документе, поскольку этот привод может относиться к любому известному коммерчески доступному типу. Линейный привод без штока такого типа, например, изготовляется и продается компанией Festo AG & Co. KG.
Как показано на фиг. 3, 4, от перекладин 300, 301 опорной рамы 3 выступают нависающие передние кронштейны 307 и задние кронштейны 308, с которыми соединен корпус верхней фиксированной части 5 А защитного кожуха 5.
Верхняя часть 5А защитного кожуха показана на фиг. 6. В этом случае эта часть защитного кожуха также содержит корпус, состоящий из металлического листа или синтетического материала, навитого на себя для образования передней основной стенки 510, задней основной стенки 511 и двух торцевых стенок 512. Корпус части 5А кожуха закреплен посредством винтов или путем склеивания с кольцевыми полосами 513, закрепленными в свою очередь на крепежных кронштейнах 307, 308, как описано выше.
Как и в случае части 5В, часть 5А также имеет опорный корпус, на котором размещена стенка со встроенными датчиками, например, имеющая вышеописанную многослойную конструкцию.
В процессе использования работой привода 6 управляют для управления вертикальным перемещением (как показано на фиг. 3, 4) подвижной части 5В защитного кожуха относительно фиксированной части 5А. Как следует из вышеприведенного описания, привод 6 непосредственно управляет промежуточной пластиной 511, соединительные концы 509 которой прикреплены к корпусу подвижной части 5В защитного кожуха. Перемещение подвижной части 5В направляется как непосредственно приводом 6, так и посредством зацепления башмаков 500, размещенных на боковых пластинах 501 в двух боковых направляющих профилях 306.
Кроме того, со ссылкой на показанный конкретный пример, подвижная часть 5В защитного кожуха 5 точно установлена в положении и может быть блокирована как в своем опущенном положении, так и в своем поднятом положении путем зацепления задвижного пальца 7 внутри первого отверстия 513 (фиг. 3, 10) или внутри второго отверстия 514. Отверстия 513, 514 выполнены в промежуточной пластине 511. Задвижной палец 7 приводится в действие в осевом направлении пневматическим приводом 8, корпус которого жестко поддерживается частью 304 балки (фиг. 5) опорной рамы 3.
Как показано, в частности, на фиг. 8-10, в показанном конкретном примере рабочий блок 4 образован захватным устройством, содержащим нижнюю опорную пластину 9 с вытянутой формой, плоскость которой перпендикулярна основному направлению А, и которая проходит параллельно направлению В, перпендикулярному направлению А, и параллельно перекладинам 300, 301 опорной рамы 3. Нижняя пластина 9 поддерживает захватные устройства 10 на своих концах, которые в показанном примере являются магнитными или электромагнитными.
Опорная пластина 9 направляется с возможностью скольжения вдоль ее продольного направления В посредством зацепления ползунков 11 внутри направляющих 12 (см. фиг. 10), размещенных на верхней опорной пластине 13 (см. фиг. 10), расположенной над пластиной 9 (см., в частности, также фиг. 8). Пластина 13 также лежит в плоскости, перпендикулярной основному направлению А, и имеет удлиненную форму, проходящую параллельно направлению В. Пластина 13 направлена с возможностью скольжения относительно опорной рамы 3 в направлении С, перпендикулярном как основному направлению А, так и направлению В. Скользящий узел пластины 13 по отношению к опорной раме 3 получают посредством зацепления ползунков 14, размещенных на пластине 13, внутри направляющих 15, размещенных на нижней перекладине 301 опорной рамы 3.
Перемещением опорной пластины 9 в направлении В управляют посредством двух пневматических приводов 16 (см. фиг. 4, 8), жестко соединенных под пластиной 13. Два привода 16 используют для управления перемещением пластины 9 между центральным положением и двумя противоположными крайними положениями, причем каждый привод может управлять ходом между центральным положением и соответствующим крайним положением. Разумеется, также может использоваться один большой пневматический привод, управляющий всем ходом между двумя крайними положениями. Перемещение пластины 13 в направлении С управляется с помощью одного привода 17 (см. фиг. 3 и 9), жестко соединенного с опорной рамой 3. Привод 17 предпочтительно также представляет собой пневматический привод, при этом предполагается, что можно применять приводы любого типа, в том числе электрические приводы.
Рабочие положения пластины 9 и пластины 13 также могут быть точно установлены и могут быть блокированы посредством активации задвижных устройств. Например, на фиг. 9 показан пневматический привод 18, размещенный на пластине 13 и управляющий задвижным пальцем 19, выполненным с возможностью избирательного взаимодействия с отверстиями 20 (одно из которых видно на фиг. 3), выполненных в элементах, выполненных как целое с пластиной 9 для установки в положение и блокировки пластины 9 в ее рабочих конечных положениях. Рабочие положения пластины 13 также могут быть точно установлены и могут быть блокированы путем зацепления задвижного пальца, управляемого приводом 21, внутри отверстий 22 (одно из которых видно на фиг. 3), выполненных в элементах, выполненных за одно целое с пластиной 13. Приводы 18, 21 также могут быть любого типа.
Наконец, функциональный узел показанного примера содержит два привода 23 (фиг. 3, 9), например, пневматического типа, управляющих захватными руками 24, используемыми для безопасности, в дополнение к магнитным устройствам 10, чтобы гарантировать, что предмет Р, захваченный устройством, не упадет в случае отказа магнитных устройств.
На опорной раме 3, два блока Е управления также установлены на всех устройствах привода, используемых функциональным узлом. В случае показанного конкретного примера, в котором все устройства привода относятся к пневматическому типу, блоки управления содержат узлы электромагнитных клапанов для управления работой различных приводов в соответствии с заданной логикой, программированной в электронном блоке управления электромагнитных клапанов.
Функциональный узел также предпочтительно содержит оптоэлектронные блоки Н.
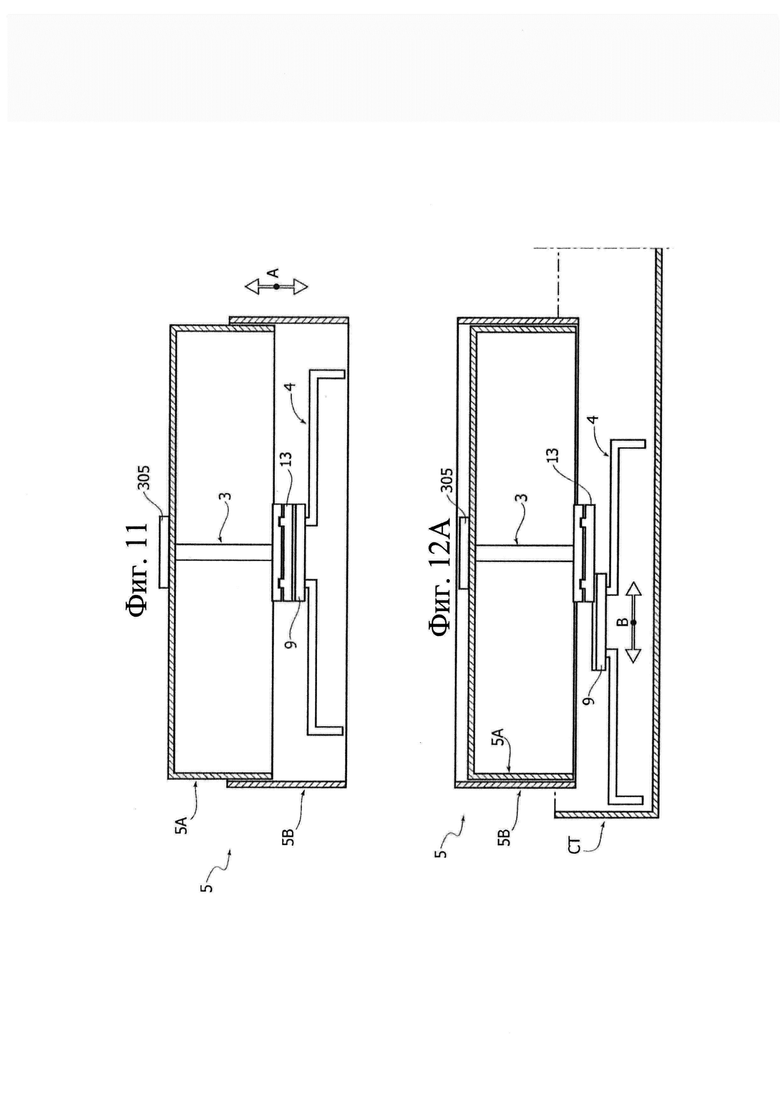
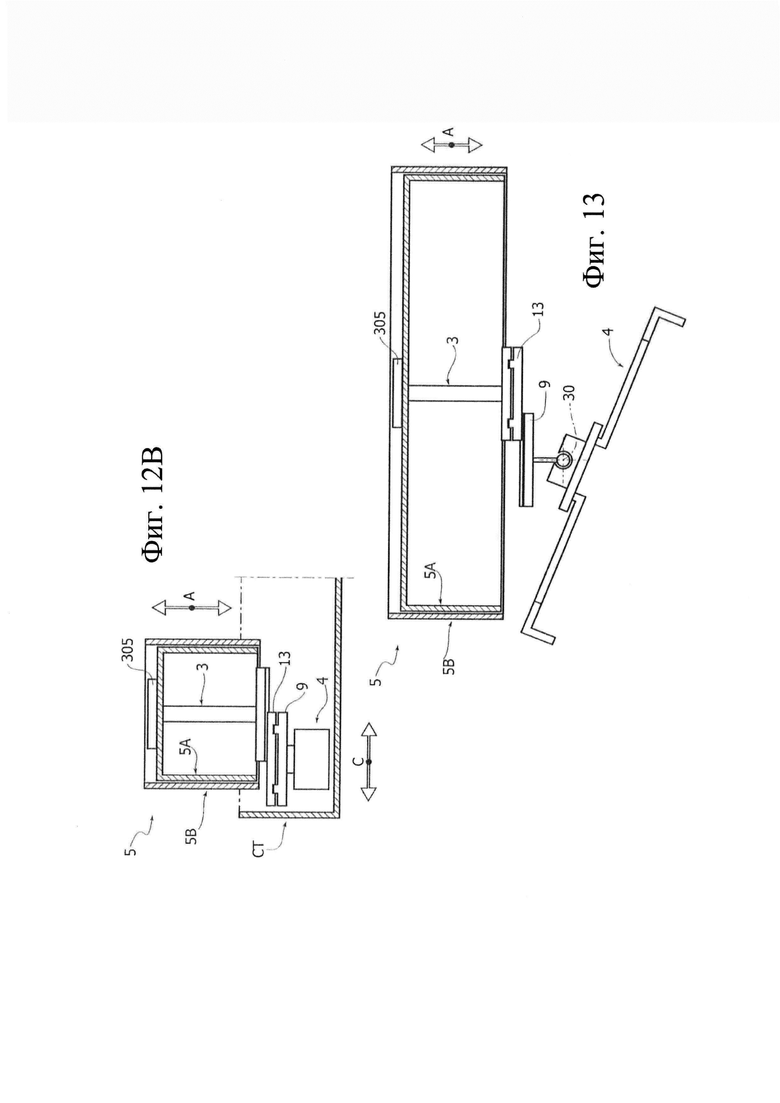
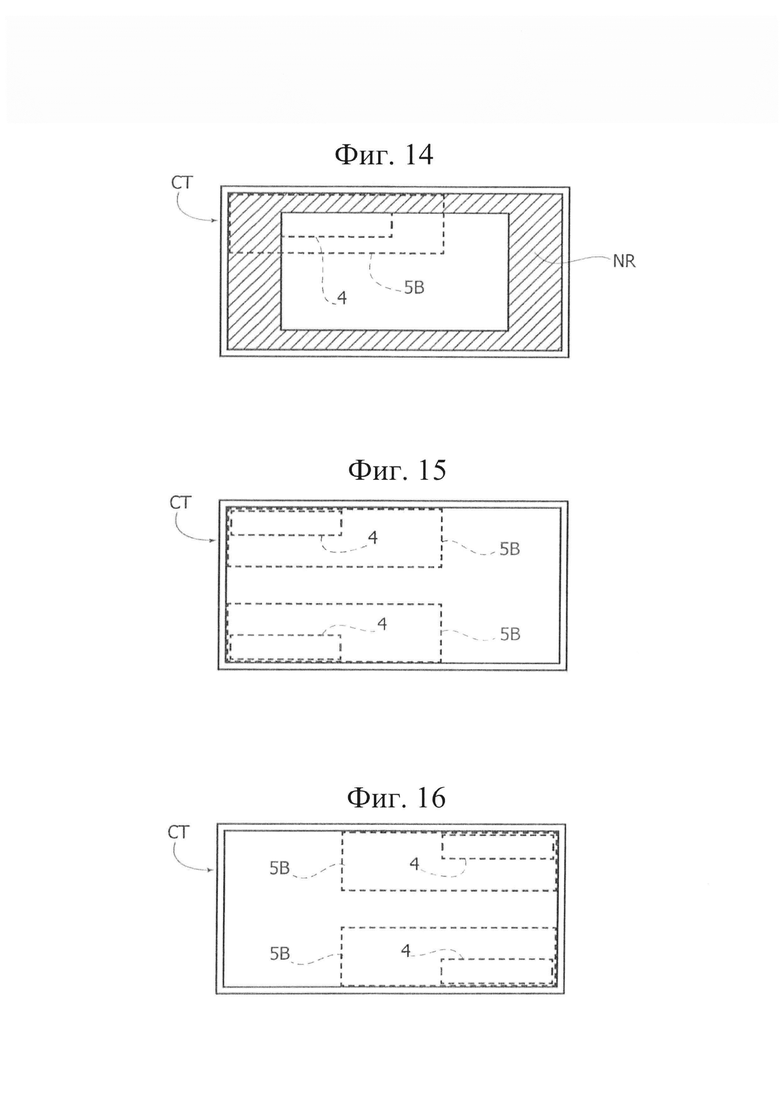
На фиг. 11, 12А, 12В схематично показан вышеописанный функциональный узел в рабочем состоянии с опущенной подвижной частью 5В защитного кожуха (фиг. 11) и в рабочем состоянии с подвижной частью 5В в поднятом положении (фиг. 12А, 12В, при этом на фиг. 12А показан вид спереди, и на фиг. 12В показан вид сбоку). На фиг. 12А, 12В показано состояние, в котором после того, как подвижная часть 5В защитного кожуха была поднята, захватное устройство 4 может быть перемещено поперек как в направлении В (фиг. 12А), так и в направлении С (фиг. 12В), для перемещения к границам зоны проекции защитного кожуха 5 (в частности, нижней части 5В), так что оно также может работать смежно с боковой стенкой контейнера СТ без риска создания помех кожухом 5 для контейнера СТ. Преимущества настоящего изобретения с этой точки зрения ясно видны на фиг. 14-16. На фиг. 1а схематично показан - в виде сверху - контейнер СТ, из которого узел согласно настоящему изобретению должен подбирать предметы. На фиг. 14 номер позиции 5В обозначает проекцию подвижной части 5В защитного кожуха 5, когда она размещена в углу контейнера СТ. Дополнительно на фиг. 14 номер позиции 4 обозначает проекцию захватного устройства 4, как если бы оно всегда должно было оставаться в центральной части защитного кожуха. Очевидно, это состояние приведет к невозможности приведения устройства 4 в контакт со стенками контейнера СТ. Вся зона периметра, заштрихованная на фиг. 14 и обозначенная как NR, будет недоступна (не достижима) для устройства. На фиг. 15, 16 вместо этого показано, что в узле согласно настоящему изобретению, благодаря возможности перемещения устройства 4 в направлениях В и С, упомянутых на фиг. 12А, 12В, устройство 4 может входить в контакт с любым из четырех углов контейнера или, конечно, в любом промежуточном положении между показанными положениями, в которых инструмент расположен смежно с одной стенкой контейнера СТ.
На фиг. 13 показан вариант осуществления, в котором захватное устройство 4 соединено с опорной рамой, так что оно также может быть повернуто по меньшей мере вокруг одной оси 30 относительно фиксированной рамы 3. Показанный пример относится к случаю, в котором используется шаровое сочленение. На фиг. 13 показано дополнительное преимущество функционального узла согласно настоящему изобретению. Как можно видеть, подвижная часть 5В защитного кожуха может быть расположена так, чтобы иметь поднятое положение, в котором она может выступать над фиксированной частью 5А. В частности, таким образом, можно расположить подвижную часть кожуха 5 таким образом, чтобы она перекрывала по высоте и окружала конец робота так, чтобы повысить степень безопасности в зоне работы робота.
Подразумевается, что, без ущерба для принципа изобретения, детали конструкции и варианты осуществления могут значительно варьироваться по отношению к деталям и вариантам, описанным и показанным исключительно в качестве примера, без отхода от объема настоящего изобретения.
Изобретение относится к функциональному узлу для промышленного робота и промышленному роботу. Функциональный узел содержит опорную раму (3), содержащую фланец (305) для крепления к запястью (105) робота, рабочий блок (4), например, захватное устройство или рабочий инструмент, поддерживаемый опорной рамой (3) и защитный кожух (5) для рабочего блока (4), образующий объем ограничения. Функциональный узел выполнен с возможностью принятия первой рабочей конфигурации, в которой защитный кожух (5) окружает и покрывает рабочий блок (4), и второй рабочей конфигурации, в которой рабочий блок (4) расположен, по меньшей мере частично, снаружи объема ограничения защитного кожуха (5). Защитный кожух (5) имеет фиксированную часть (5А) и часть (5В), подвижную вдоль основного направления (А) относительно фиксированной части (5А). Подвижная часть (5В) выполнена подвижной между опущенным положением, в котором она окружает и полностью покрывает рабочий блок (4), и поднятым положением, в котором рабочий блок (4) непокрыт. Фиксированная часть (5А) жестко соединена с опорной рамой (3), поддерживающей рабочий блок. Подвижная часть (5В) расположена снаружи фиксированной части и подвижно установлена на опорной раме (3). Фиксированная часть (5А) и подвижная часть (5В) имеют коллаборативную внешнюю конструкцию, оснащенную датчиками близости и/или контактными датчиками, конфигурированными для обнаружения близости и/или контакта с инородным телом. Изобретения обеспечивают высокой степенью безопасности в отношении его использования в открытой среде. 2 н. и 10 з.п. ф-лы, 16 ил.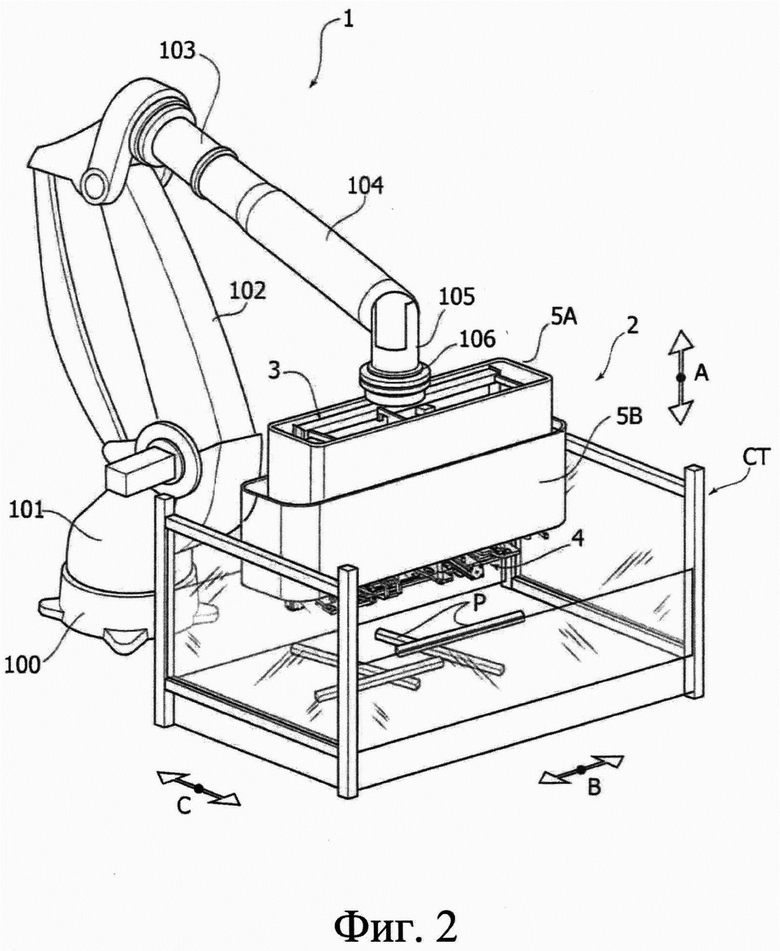
1. Функциональный узел для промышленного робота, при этом упомянутый функциональный узел содержит:
- опорную раму (3), содержащую фланец (305) для крепления к запястью (105) робота,
- рабочий блок (4), например, захватное устройство или рабочий инструмент, поддерживаемый упомянутой опорной рамой (3),
- защитный кожух (5) для упомянутого рабочего блока (4), образующий объем ограничения,
- при этом упомянутый функциональный узел выполнен с возможностью принятия первой рабочей конфигурации, в которой упомянутый защитный кожух (5) окружает и покрывает упомянутый рабочий блок (4), и второй рабочей конфигурации, в которой упомянутый рабочий блок (4) расположен, по меньшей мере частично, снаружи объема ограничения упомянутого защитного кожуха (5),
причем упомянутый защитный кожух (5) имеет фиксированную часть (5А) и часть (5В), подвижную вдоль основного направления (А) относительно фиксированной части (5А), при этом упомянутая подвижная часть (5В) защитного кожуха (5) выполнена подвижной между опущенным положением, в котором она окружает и полностью покрывает упомянутый рабочий блок (4), и поднятым положением, в котором упомянутый рабочий блок (4) непокрыт,
причем:
- фиксированная часть (5А) защитного кожуха (5) жестко соединена с упомянутой опорной рамой (3), поддерживающей рабочий блок,
- подвижная часть (5В) защитного кожуха (5) расположена снаружи фиксированной части и подвижно установлена на упомянутой опорной раме (3),
- как фиксированная часть (5А), так и подвижная часть (5В) упомянутого защитного кожуха (5) имеет коллаборативную внешнюю конструкцию, оснащенную датчиками близости и/или контактными датчиками, конфигурированными для обнаружения близости и/или контакта с инородным телом.
2. Функциональный узел по п.1, отличающийся тем, что упомянутый рабочий блок (4) выполнен подвижным относительно упомянутой опорной рамы (3) по меньшей мере в одном поперечном направлении (В, С) относительно упомянутого основного направления (А) так, что, когда упомянутая подвижная часть (5В) защитного блока (5) находится в своем поднятом положении, упомянутый рабочий блок (4) подвижен в положении снаружи объема ограничения, образованного упомянутой подвижной частью (5B) защитного кожуха (5).
3. Функциональный узел по п.2, отличающийся тем, что упомянутый рабочий блок (4) выполнен подвижным в двух дополнительных направлениях (B, C) относительно упомянутой опорной рамы (3), причем упомянутые дополнительные направления (B, C) перпендикулярны друг другу и перпендикулярны упомянутому основному направлению (А).
4. Функциональный узел по п.1, отличающийся тем, что содержит первую пластину (13), направляемую с возможностью скольжения вдоль первого дополнительного направления (С) на упомянутой опорной раме (3), и вторую пластину (9), несущую один или более рабочих инструментов (10) и направляемую на упомянутой первой пластине (13) во втором дополнительном направлении (В), перпендикулярном первому дополнительному направлению (С) и основному направлению (А).
5. Функциональный узел по п.4, отличающийся тем, что содержит приводное устройство (6) для перемещения подвижной части (5В) защитного кожуха (5), приводное устройство (17) для перемещения упомянутой первой пластины (13) и приводное устройство (16) для перемещения упомянутой второй пластины (9), а также множество задвижных устройств (8, 18, 21) для точной установки в положение и блокировки упомянутой нижней части (5В) защитного кожуха (5), упомянутой первой пластины (13) и упомянутой второй пластины (9).
6. Функциональный узел по любому из пп.1-5, отличающийся тем, что упомянутый рабочий блок (4) поддерживается так, что обеспечена возможность его вращения по меньшей мере вокруг одной оси (30) относительно опорной рамы (3).
7. Функциональный узел по п.5, отличающийся тем, что на упомянутой опорной раме (3) установлен по меньшей мере один блок (Е) управления для управления упомянутыми приводными устройствами и упомянутыми задвижными устройствами.
8. Функциональный узел по любому из пп.1-7, отличающийся тем, что подвижная часть (5В) защитного кожуха (5) в своем поднятом положении проходит над упомянутым крепежным фланцем (305).
9. Функциональный узел по любому из пп.1-8, отличающийся тем, что упомянутый рабочий блок представляет собой захватное устройство (4) для захвата предметов (Р) в контейнере (С), и отличающийся тем, что размеры и вертикальный ход подвижной части защитного кожуха заданы в соответствии с размером захватываемых предметов так, что при подхвате предмета (Р) подвижная часть (5В) защитного кожуха может опускаться в положение, в котором подхватываемый предмет находится внутри защитного кожуха.
10. Функциональный узел по любому из пп.1-8, отличающийся тем, что датчики близости и/или контактные датчики выполнены с возможностью обнаружения близости и/или контакта с оператором.
11. Промышленный робот, оснащенный функциональным узлом по любому из пп.1-10, причем упомянутый робот содержит контроллер, при этом упомянутый контроллер конфигурирован для получения сигналов от упомянутых датчиков близости и/или контактных датчиков защитного кожуха (5), чтобы автоматически уменьшать скорость перемещения упомянутого робота или автоматически останавливать упомянутый робот всякий раз, когда обнаружена чрезмерная близость или контакт с инородным телом.
12. Промышленный робот по п.11, отличающийся тем, что датчики близости и/или контактные датчики выполнены с возможностью обнаружения близости и/или контакта с оператором.
| US 9475200 B2, 25.10.2016 | |||
| DE 102012217764 A1, 12.06.2014 | |||
| DE 202013105501 U1, 09.04.2015 | |||
| JP 2010010116 A, 14.01.2010 | |||
| US 9272415 B2, 01.03.2016. |

