Следящая система относится к области систем слежения за подвижными объектами, в том числе с качающегося основания, она также может использоваться для управления воздушным движением.
Известна наблюдательная система, состоящая из двух тепловизионных приборов, работающих в разных диапазонах и установленных на общем основании ([1] , стр. 344-346). В этой системе отсутствуют устройства для определения координат наблюдаемых объектов, и поэтому она не может быть использована для слежения за объектами.
Известна также система ([1], стр.375, рис.а), в которой несколько следящих устройств (инфракрасное, телевизионное, лазерное) установлены на общей платформе. Такая система способна сопровождать находящийся в поле зрения указанных устройств объект. Однако имеет следующие недостатки:
во-первых, все устройства сопровождают один и тот же объект;
во-вторых, при сопровождении этого объекта из-за разъюстировок устройств возникают сложности с определением истинных координат объекта, за которым осуществляется слежение.
Наиболее близкой к предлагаемому техническому решению является оптико-электронная следящая система ([2], стр.117-120, рис.3.28), содержащая несколько установленных на общей платформе пеленгаторов, выходные координаты которых сравниваются с выходом одного из них, принимаемого за базовый, а полученные разности подвергаются фильтрации и используются в качестве поправок к измеряемым пеленгаторами координатам. Указанная система имеет следующие недостатки:
а) она предназначена для сопровождения только одного объекта;
б) при сопровождении этого объекта все пеленгаторы должны работать одновременно, если один из пеленгаторов отключен, ухудшается точность определения координат сопровождаемого объекта;
в) в случае попытки использования пеленгаторов для сопровождения разных объектов ухудшается помехоустойчивость пеленгаторов из-за возможности перехода на сопровождение иного объекта из находящихся в поле зрения.
Задачей предлагаемого технического решения является обеспечение возможности сопровождения нескольких объектов одновременно, повышение устойчивости сопровождения одного объекта, повышение точности определения координат пеленгаторами друг относительно друга, повышение помехозащищенности следящей системы.
Решение указанной задачи достигается за счет того, что в следящую систему, состоящую из механически соединенных первого и второго пеленгаторов, а также фильтра полезного сигнала и блока сравнения координат, первым входом соединенного с первым выходом первого пеленгатора, введены блок преобразования из системы координат второго пеленгатора в систему координат первого пеленгатора и блок памяти, последовательно соединенные блок логики и коммутатор, при этом первый вход блока преобразования из системы координат второго пеленгатора в систему координат первого пеленгатора соединен с первым выходом второго пеленгатора, его второй вход соединен с выходом блока памяти, а выход соединен со входом первого пеленгатора и вторым входом блока сравнения координат, выход которого подключен через второй вход и первый выход коммутатора ко входу фильтра полезного сигнала, выход фильтра полезного сигнала через третий вход и второй выход коммутатора подключен к входу блока памяти, первый и второй входы блока логики соединены соответственно со вторым выходом первого пеленгатора и вторым выходом второго пеленгатора, а третий вход блока логики является входом внешней системы.
Все использованные блоки и устройства являются известными или могут быть выполнены из известных блоков, соединенных известным образом.
Пеленгаторы могут быть выполнены, например, как в [2], [3], [4] или [5]. Блок преобразования из системы координат второго пеленгатора в систему координат первого пеленгатора, блок сравнения координат и фильтр полезного сигнала могут быть реализованы на аналоговой [6] или цифровой [7] элементной базе. Коммутаторы могут быть выполнены на базе электромеханических реле, герконов, полупроводниковых ключей и т.п. Блок памяти может быть исполнен как на базе цифровых (оперативные запоминающие устройства - ОЗУ), так и аналоговых (устройства выборки-хранения) приборов. Блок логики может быть выполнен как с помощью обычных логических элементов "И", так и с помощью цифровых микросхем, например постоянных запоминающих устройств - ПЗУ (входы блока логики играют роль адреса, а выход - содержимое соответствующей ячейки).
В качестве иллюстрации на чертеже приведена функциональная схема предлагаемой следящей системы для канала управления по одной координате.
Следящая система состоит из пеленгаторов 1 и 2, установленных на общей платформе (по крайней мере их приемные устройства), блока преобразования из системы координат второго пеленгатора в систему координат первого пеленгатора (БПК) 3, первый вход которого соединен с первым выходом второго пеленгатора, блока сравнения координат (БСК) 4, первый вход которого соединен с первым выходом первого пеленгатора, а второй вход - с выходом БПК и входом первого пеленгатора, последовательно соединенных коммутатора 5 и фильтра полезного сигнала (ФПС) 6, а также блока логики (БЛ) 7, выходом соединенного с первым входом коммутатора 5, и блока памяти (БП) 8, выходом соединенного со вторым входом БПК 3, а входом - через второй выход и третий вход коммутатора - с выходом ФПС 6. Выход БСК 4 соединен со вторым входом коммутатора. У блока логики 7 первый вход соединен со вторым выходом первого пеленгатора, второй вход - со вторым выходом второго пеленгатора, третий вход является входом внешней системы.
Работа системы осуществляется следующим образом. Пусть в некоторый период времени оба пеленгатора сопровождают один и тот же объект. Сигналы об этом поступают со вторых выходов первого и второго пеленгаторов соответственно на первый и второй входы блока логики 7. Когда от внешней системы на третий вход блока логики поступает команда на проведение сравнения координат пеленгаторов, БЛ выдает команду управления на первый вход коммутатора 5. По этой команде коммутатор подключает выход блока сравнения координат 4 к входу фильтра полезного сигнала 6, а выход фильтра к входу блока памяти 8. На блок преобразования координат 3 с первого выхода второго пеленгатора поступает сигнал о координате сопровождаемого объекта. Хотя приемные устройства пеленгаторов и установлены на общем основании, имеются, по крайней мере, два фактора, вызывающих необходимость в преобразовании координат. Во-первых, это параллакс из-за того, что не всегда возможно совместить положение центров координат приемных устройств в пространстве. Во-вторых, может иметь место несовпадение систем разверток и несовпадение нелинейностей пеленгационных характеристик. Наличие параллакса может быть учтено зависимостью (1):
δϕ = arctg(I/D); (1)
где δϕ - параллакс между пеленгаторами;
I - смещение центров координат пеленгаторов;
D - дальность от пеленгаторов до сопровождаемого объекта.
Необходимая для определения величины параллакса дальность может быть получена как от внешней системы, так и от одного из пеленгаторов. Очевидно, что для малых смещений или очень больших дальностей угол параллакса может быть пренебрежимо малым, но в общем случае он должен быть учтен. Зависимости для пересчета пеленгационных характеристик и законов развертки определяются их конкретными видами у пеленгаторов. В частном случае их подобия они могут быть вырождены в линейные зависимости. Дополнительно в вычисляемую координату вносится поправка на величину рассогласования (разъюстировки) осей пеленгаторов, занесенная ранее в блок памяти 8. Если она не была занесена, то принимается нулевой.
Полученная координата объекта от второго пеленгатора в системе координат первого пеленгатора выдается с выхода БПК 3 на блок сравнения координат 4, куда одновременно выдается с выхода первого пеленгатора координата того же объекта. Эти сигналы вычитаются друг из друга, а результат через второй вход и первый выход коммутатора 5 выдается с выхода БСК 4 на вход фильтра полезного сигнала 6, где из него отделяется информативная составляющая от наложенных шумов. Проектирование фильтров такого назначения подробно описано в [2] , здесь отметим, что для частного случая постоянной во времени разъюстировки хороший результат дает простое осреднение величины сигнала. Полученное значение оценки разъюста через третий вход и второй выход коммутатора заносится в блок памяти 8 из ФПС 6. Наличие связи с выхода БПК 3 на вход первого пеленгатора позволяет в описанном режиме ограничить зону поиска им объекта, по которому проводится определение рассогласования осей пеленгаторов, и более достоверно полагать, что оба пеленгатора сопровождают один и тот же объект.
Очевидно, что при работе в описанном режиме в случае срыва сопровождения объекта хотя бы одним из пеленгаторов пропадет соответствующий сигнал на выходе блока логики 7, сигнал управления коммутатором 5 снимется, его контакты разомкнутся, при этом прекратится фильтрация в ФПС 6 и обновление информации в блоке памяти 8.
Рассмотрим теперь вариант, когда пеленгаторы сопровождают разные объекты. В этом случае на третий вход блока логики 7 сигнал не подается, и потому, несмотря на наличие сигналов о сопровождении от пеленгаторов на первом и втором входах БЛ, коммутатор 5 будет находиться в состоянии, когда его контакты будут разомкнуты. Следовательно, при этом сигнал с выхода блока памяти 8 не будет изменяться. Однако координата в БПК 3 будет определяться аналогично вышеописанному. Поступая на вход первого пеленгатора, координата с выхода преобразователя координат используется как информация о запретной области, где захват объекта первым пеленгатором нежелателен. Тем самым уменьшается возможность захвата первым пеленгатором 1 объекта, сопровождаемого вторым пеленгатором 2. Это создает условия для устойчивого сопровождения пеленгаторами различных объектов, находящихся в пределах их полей зрения (диаграмм направленности).
Очевидно также, что описанная система тривиально может быть применена и при числе пеленгаторов больше двух. Действительно, если получены значения разъюстов относительно некоторого базового пеленгатора, то элементарно как соответствующие разности могут быть получены в этой системе координат и разности между любыми двумя. А если известны разности, параллаксы и виды разверток и пеленгационных характеристик и т.п., всегда может быть определена координата объекта, сопровождаемого пеленгатором i, в системе координат пеленгатора j. В частности, это относится и к определению координат объекта, сопровождаемого первым пеленгатором относительно центра координат второго пеленгатора.
Таким образом, в заявляемом техническом решении за счет определения разъюстировок в процессе слежения за объектами, запоминания их величины и определения координат сопровождаемых объектов в единой системе координат обеспечивается:
повышение устойчивости сопровождения одного объекта разными пеленгаторами;
возможность сопровождения разных объектов пеленгаторами при уменьшении возможности захвата не того объекта, т. е. повышение помехозащищенности системы;
повышение точности определения координат пеленгаторами друг относительно друга как при сопровождении общего, так и разных объектов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Госсорг Ж. "Инфракрасная термография. Основы, техника, применение". Пер. с франц., М., "Мир", 1988, стр.344-346, стр.375, рис.а, аналоги.
2. Максимов М. В., Горгонов Г.И. "Радиоэлектронные системы самонаведения", М., "Радио и связь", 1982, стр.117-120, рис.3.28, прототип.
3. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. "Телевизионные системы летательных аппаратов", М., "Советское радио", 1979 г.
4. "Радиолокационные устройства", под ред. В.В. Григорина-Рябова, М., "Советское радио", 1970 г., стр.570, рис.21.12.
5. Патент Российской федерации 2168753, МПК7 G 05 D 3/12, 2000 г.
6. Тетельбаум И. М. , Шнейдер Ю.Р. "Практика аналогового моделирования динамических систем", М., "Энергоатомиздат", 1987 г.
7 Фрэнк Т. С. "РДР-11 архитектура и программирование", М., "Радио и связь", 1986 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
Следящая система относится к области систем слежения за подвижными объектами, в том числе с качающегося основания, она также может быть использована для управления воздушным движением. Следящая система состоит из пеленгаторов, установленных на общей платформе, блока преобразования координат из системы координат второго пеленгатора в систему координат первого пеленгатора (БПК), блок сравнения координат (БСК), коммутатора, фильтра полезного сигнала (ФПС), блока логики (БЛ) и блока памяти (БП). Достигаемым техническим результатом является обеспечение возможности сопровождения нескольких объектов одновременно, повышение устойчивости сопровождения одного объекта, повышение точности определения координат пеленгаторами относительно друг друга, повышение помехозащищенности следящей системы. 1 ил.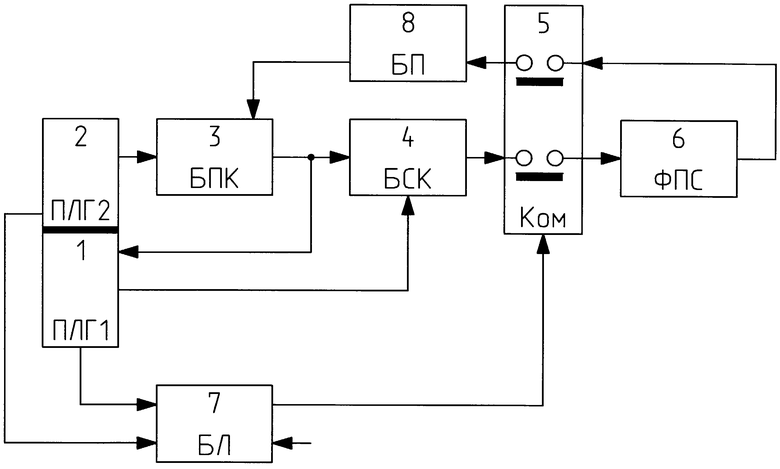
Следящая система, состоящая из механически соединенных первого и второго пеленгаторов, а также фильтра полезного сигнала и блока сравнения координат, первым входом соединенного с первым выходом первого пеленгатора, отличающаяся тем, что в ее состав введены блок преобразования из системы координат второго пеленгатора в систему координат первого пеленгатора и блок памяти, последовательно соединенные блок логики и коммутатор, при этом первый вход блока преобразования из системы координат второго пеленгатора в систему координат первого пеленгатора соединен с первым выходом второго пеленгатора, его второй вход соединен с выходом блока памяти, а выход соединен со входом первого пеленгатора и вторым входом блока сравнения координат, выход которого подключен через второй вход и первый выход коммутатора ко входу фильтра полезного сигнала, выход фильтра полезного сигнала через третий вход и второй выход коммутатора подключен ко входу блока памяти, первый и второй входы блока логики соединены соответственно со вторым выходом первого пеленгатора и вторым выходом второго пеленгатора, а третий вход блока логики является входом внешней системы.
| МАКСИМОВ М.В., ГОРГОНОВ Г.И | |||
| Радиоэлектронные системы самонаведения | |||
| - М.: Радио и связь, 1982, с.117-120 | |||
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО АВТОЗАХВАТА И АВТОСОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1992 |
|
RU2032916C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| US 5214433 А, 25.05.1993 | |||
| US 4837576, 06.06.1989. | |||

