Изобретение относится к машиностроению, использующему адаптивные роботы, содержащие линейные и поворотные приводы и следящую систему уравнения.
Известен гидрорезольер суммарного вектора скорости двух линейных взаимно перпендикулярных гидроприводов в составе "Пневмогидравлического робота" по авт. св. СССР 574292, МПК кл. В 23 К 11/10, В 23 К 37/02 (прототип), упоминаемый в формуле изобретения: "...полости <двух> гидроцилиндров соединены между собой парой дополнительных гидродросселей, служащих датчиками скорости, имеющих сопротивления, меняющие свою величину пропорционально от минимума до бесконечности и наоборот - через каждые четверть оборота гироскопической оси, причем на каждой оси гироскопа расположено по два разноименных указанных гидродросселя, присоединенных к трем парам взаимноперпендикулярных приводов, к плоскости проекций двух направлений движения которых обращена одна из осей <гироскопа> как третья ось декартова пространства; у каждой пары разноименных угловых гидродросселей, кинематически связанных с главной осью, основной и дополнительной осями гироскопа, величины сопротивлений сдвинуты по фазе на четверть оборота осей".
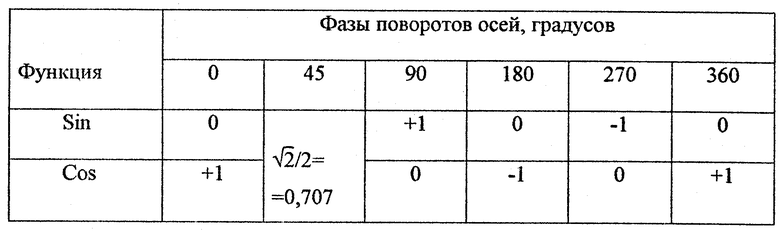
При этом минимальное сопротивление пропорционально cos=1, т.е. гидропоток открыт полностью, а максимальное сопротивление (равное бесконечности) соответствует sin=0, т.е. гидропоток полностью перекрыт.
Задачей изобретения является обеспечение постоянной технологической скорости подачи рабочего инструмента, встроенного в гироскоп адаптивного робота, независимо от кривизны отслеживаемой линии в декартовом пространстве.
Недостатком известного гидрорезольвера суммарного вектора скорости является то, что парные его гидродатчики не содержат признаков их конструктивного выполнения.
Задачей изобретения является автоматическая стабилизация скорости подачи рабочего инструмента двумя или тремя линейными гидроприводами одновременно.
Задача достигается тем, что гидрорезольвер стабилизации суммарного вектора скорости двух линейных взаимно перпендикулярных гидроприводов, расположенный на каждой из трех осей гироскопа адаптивного робота и выполненный в виде пары угловых гидродросселей, являющихся датчиками скорости и имеющих гидравлические сопротивления, меняющие свою величину пропорционально от минимума, соответсвующего cos=1, к бесконечности, соответствующей sin=0, и наоборот каждые четверть оборота гироскопа (см.таблицу в конце описания).
При этом пара гидродросселей каждого гидрорезольвера сблокирована из разноименных гидродатчиков, просоединенных к указанным взаимно перепендикулярным линейным гидроприводам, к плоскости проекций двух направлений хода которых обращена ось гидрорезольвера как третья ось декартова пространства, а величины гидравлических сопротивлений пары гидродросселей одного гидрорезольвера сдвинуты по фазе на четверть оборота его оси, пара его угловых гидродросселей снабжена одним золотником с корпусом, при этом в золотнике выполнены два параллельных прямоугольных отверстия, а в его корпусе - два сквозных взаимно перпендикулярных круглых отверстия одинакового диаметра, причем золотник установлен в корпусе с возможностью одновременного перекрытия одного указанного круглого отверстия по закону синуса от ноля до единицы, а другого - по закону косинуса от единицы до ноля и наоборот.
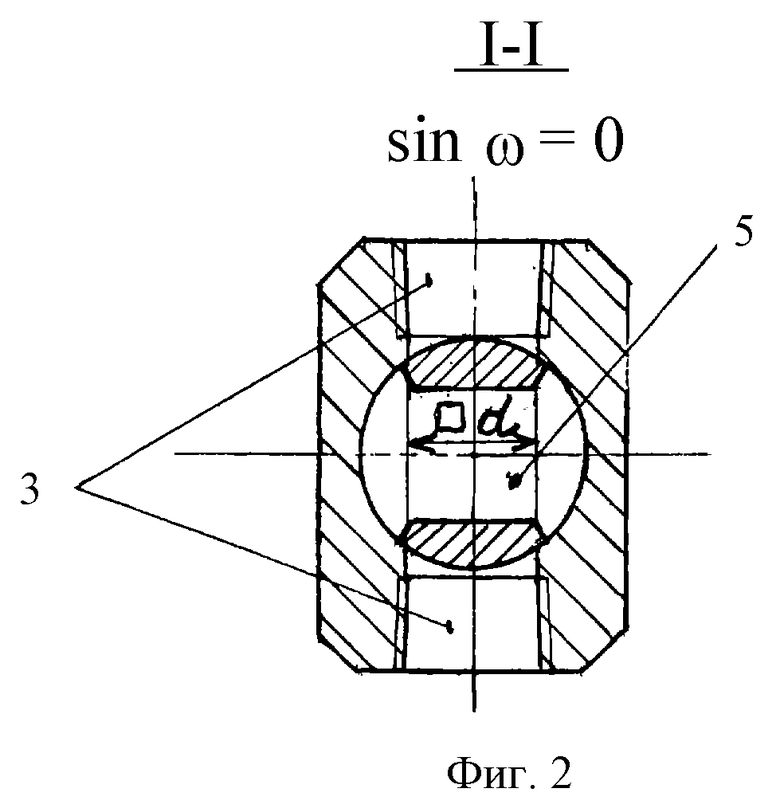
На фиг. 1 показано устройство гидрорезольвера стабилизации суммарного вектора скорости; нa фиг.2 - разрез I-I; на фиг.3 - разрез II-II.
При рассмотрении сущности изобретения нужно иметь в виду следущее.
Гироскопом названо устройство, которое содержит четыре приводных оси: три гироскопических - "чистого" вращения (главную), прецессий в широтном направлении, нутаций в меридианальном направлении, - а также ось манипулирования нормалью технологического инструмента, перпендикулярную касательной к кривизне траектории слежения (последняя ось в данном описании не фигурирует).
Начальным положением гироскопа названа позиция адаптивного робота, при которой все гироскопические оси параллельны или перпендикулярны плоскостям декартова пространства.
Адаптивный робот содержит три линейных гидропривода, поименованных так же, как оси декартова пространства в соответствии с направлением их хода. С линейными гидроприводами соединены гидрорезольверы вектора скорости подачи технологического инструмента, встроенного в гироскоп. На каждой из трех осей гироскопа расположен один гидрорезольвер, выполненный в виде пары угловых гидродросселей, являющихся датчиками скорости линейных гидроприводов.
Пара гидродросселей гидрорезольвера имеет гидравлические сопротивления, меняющие свою величину пропорционально от минимума, соответствующего cos=1, к бесконечности, соответствующей sin=0, и наоборот каждые четверть оборота оси гироскопа. Сблокирована эта пара из разноименных гидродатчиков, присоединенных к двум взаимно перпендикулярным гидроприводам того же наименования, что и гидродатчики гидрорезольвера, ось которого обращена к плоскости проекций их хода как третья ось декартова пространства. Величины гидросопротивлений пары гидродросселей одного гидрорезольвера сдвинуты по фазе на четверть оборота его оси.
Каждая пара гидродросселей гидрорезольвера сблокирована в корпусе 1 с золотником 2. Одни сквозные круглые отверстия 3 корпуса соединены с линейным гидроприводом одного наименования (например, X), а другие 4 - с гидроприводом другого наименования (например, Y) и оси этих круглых отверстий сдвинуты по фазе на 90o. Золотник 2 выполнен с двумя параллельными прямоугольными отверстиями.
При этом ось гидрорезольвера (в начальном положении, например, параллельная оси Z) перпендикулярна к плоскости проекций хода гидроприводов Х и Y как третья ось декартова пространства. То же свойство присуще и двум другим гидрорезольверам: к плоскости проекций хода приводов Х и Z ось гидрорезольвера Y, а к плоскости Z и Y - соответственно ось X.
Следует иметь в виду, что сдвиг по фазе на 90o прямоугольных отверстий золотника и параллельное расположение сквозных круглых отверстий корпуса не меняет функции гидрорезольвера.
Гидрорезольвер выполняет такую же функцию, как резольвер системы электроуправления германского робота "КУКА" (см. фирменный проспект, а также лицензионные инструктивные материалы "АВТОВАЗ - КУКА"), имеющего в качестве приводов шаговые электродвигатели. Указанный электрорезольвер робота КУКА выполнен в виде двух вращающихся синусно-косинусных трансформаторов, сдвинутых по фазе на 90o, соосно расположенных на осях робота. Система управления записывает и считывает дискретные сигналы резольвера в виде магнитных штрихов на ленте магнитофона.
Гидрорезольвер суммарного вектора скорости линейных взаимно перпендикулярных гидроприводов управляет скоростью линейных гидроприводов без посредничества системы электроуправления, напрямую автоматически влияя на скорость их хода путем суммирования штрихов - отрезков диаметров круглых отверстий 3 и 4 (фиг.1, 2 и 3) корпуса 1, отсекаемых краем прямоугольных отверстий 5 золотника 2, а также тригонометрического суммирования длин штрихов-катетов прямоугольных треугольников, вершины которых скользят по окружности совмещенных в одну проекцию круглых отверстий 4 и 5 корпуса 1 и у которых ⊘d есть гипотенуза, принимаемая за единицу.
Работа гидрорезольвера стабилизации суммарного вектора скорости происходит следующим образом.
При поворотах золотника гидрорезольвера автоматически выполняется:
- суммирование отрезков диаметров двух круглых отверстий в корпусе стабилизатора. Краем прямоугольного отверстия 5 (□d, фиг.2) золотника 2 приоткрывается одно круглое отверстие 3 (⊘d) корпуса 1 на длину "стрелки" дуги, отсекаемой от диаметра круглого отверстия ⊘d. Одновременно диаметр (⊘d фиг. 3) второго круглого отверстия 4 таким же прямым краем другого прямоугольного отверстия 5 уменьшается на длину такой же "стрелки" дуги. Сумма стрелки одного диаметра круглого отверстия 3 и усеченного на такую же стрелку другого такого же диаметра круглого отверстия 4 при любых поворотах золотника 2 всегда постоянна и равна длине диаметра круглого отверстия (⊘d) корпуса 1;
- суммирование длин хорд, отсекаемых от площади круглых отверстий ⊘d корпуса 1. Отсекаемые хорды в отверстиях 3 и 4 корпуса 1 суть стороны прямоугольного треугольника, опирающиеся на единый (одинаковый) диаметр совмещенных в одну проекцию двух отверстий 3 и 4 ⊘d как на гипотенузу, соотношение с которой есть синус и косинус, как бы ни вращалась вершина треугольника по окружности диаметра (⊘d), принимаемого за единицу.
Тригонометрическая сумма синуса и косинуса в одном прямоугольном треугольнике с катетами, пропорциональными синусу и косинусу, всегда равна единице (sin+cos= 1). Примыкающие вплотную друг к другу хорды, изменяющиеся по длине с поворотом золотника 2, интегрально составляют площадь проходного сечения круглых отверстий пары гидродросселей, присоединенных к двум взаимно перпендикулярным линейным гидроприводам.
Таким образом, согласно тригонометрическому закону гидропоток через площади проходных сечений пары гидродросселей, присоединенных к двум одноименным с ними линейным гидроприводам всегда (стабильно!) равен условной единице, т.е. заданной технологической скорости подачи рабочего инструмента независимо от изгибов траектории слежения.

Изобретение относится к машиностроению, в частности к гидроприводам адаптивных роботов со следящей системой управления. Сущность изобретения заключается в том, что гидрорезольвер расположен на каждой из трех осей гироскопа адаптивного робота и выполнен в виде пары угловых гидродросселей. Указанные гидродроссели являются датчиками скорости и имеют гидравлические сопротивления, меняющие свою величину пропорционально от минимума, соответствующего cos= 1, к бесконечности, соответствующей sin=0, и наоборот каждые четверть оборота оси гироскопа. Пара гидродросселей каждого гидрорезольвера сблокирована из разноименных гидродатчиков, присоединенных к взаимно перпендикулярным линейным гидроприводам, к плоскости проекций двух направлений хода которых обращена ось гидрорезольвера как третья ось декартова пространства. Величины гидравлических сопротивлений пары гидродросселей одного гидрорезольвера сдвинуты по фазе на четверть оборота его оси. Пара угловых гидродросселей снабжена одним золотником с корпусом. В золотнике выполнены два параллельных прямоугольных отверстия, а в его корпусе - два сквозных взаимно перпендикулярных круглых отверстия одинакового диаметра. Золотник установлен в корпусе с возможностью одновременного перекрытия одного указанного круглого отверстия по закону синуса от ноля до единицы, а другого - по закону косинуса от единицы до ноля и наоборот. Техническим результатом изобретения является автоматическая стабилизация скорости подачи рабочего инструмента двумя или тремя линейными гидроприводами одновременно. 3 ил., 1 табл.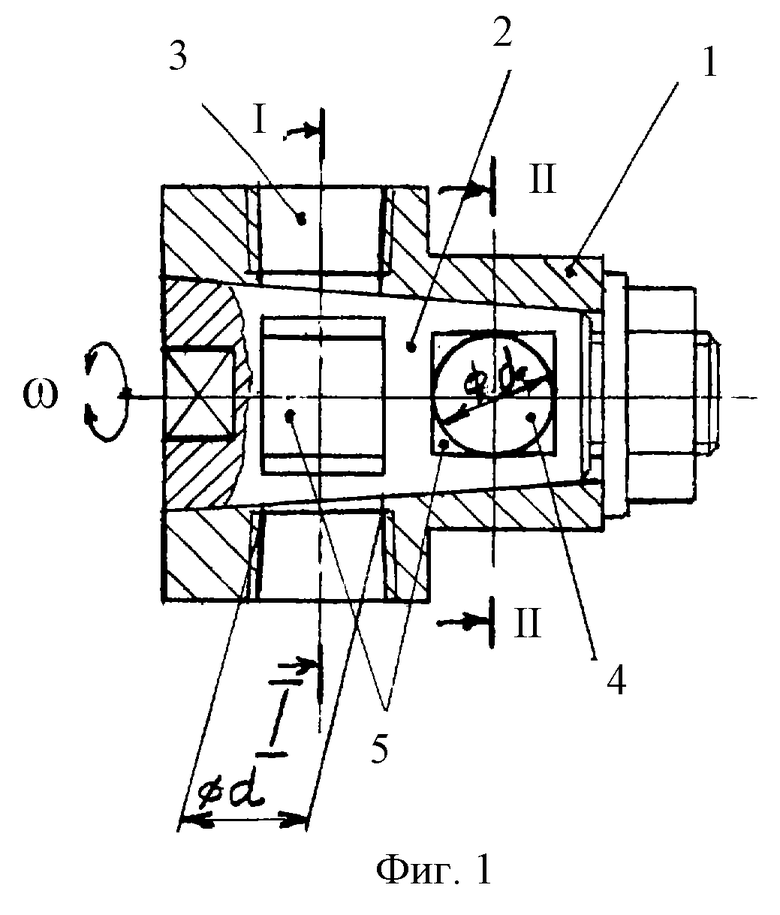
Гидрорезольвер стабилизации суммарного вектора скорости двух линейных взаимно перпендикулярных гидроприводов, расположенный на каждой из трех осей гироскопа адаптивного робота и выполненный в виде пары угловых гидродросселей, являющихся датчиками скорости и имеющих гидравлические сопротивления, меняющие свою величину пропорционально от минимума, соответствующего cos= 1, к бесконечности, соответствующей sin= 0, и наоборот каждые четверть оборота оси гироскопа, причем пара гидродросселей каждого гидрорезольвера сблокирована из разноименных гидродатчиков, присоединенных к указанным взаимно перпендикулярным линейным гидроприводам, к плоскости проекций двух направлений хода которых обращена ось гидрорезольвера как третья ось декартова пространства, а величины гидравлических сопротивлений пары гидродросселей одного гидрорезольвера сдвинуты по фазе на четверть оборота его оси, отличающийся тем, что пара его угловых гидродросселей снабжена одним золотником с корпусом, при этом в золотнике выполнены два параллельных прямоугольных отверстия, а в его корпусе - два сквозных взаимно перпендикулярных круглых отверстия одинакового диаметра, причем золотник установлен в корпусе с возможностью одновременного перекрытия одного указанного круглого отверстия по закону синуса от ноля до единицы, а другого - по закону косинуса от единицы до ноля и наоборот.
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU2028929C1 |
| ПАРИТЕТНЫЙ РАСПОЗНАВАТЕЛЬ | 2003 |
|
RU2230357C1 |
| US 4986074, 22.01.1991 | |||
| DE 3800990 А1, 27.07.1989. | |||

