Изобретение относится к машиностроению, использующему в производстве адаптивные роботы, имеющие гидросистему и следящую систему управления.
Известен гидроблок стабилизации скорости линейных приводов трехкоординатной тележки "Пневмогидравлического робота" по а.с. СССР 574292, МПК кл. В 23 К 11/10, В 23 К 37/02, в гидросистеме которого к каждому из трех линейных приводов присоединен тормозной гидродроссель, настроенный на одну и ту же постоянную технологическую линейную скорость.
К каждой паре тормозных гидродросселей двух линейных приводов, взаимно перпендикулярный ход которых проецируется на одну плоскость декартова пространства, присоединены параллельно два фазовых гидродросселя-датчика одного гидрорезольвера, закрепленного на одной из трех осей гироскопа, которая в начальном положении (при котором все его оси параллельны или перпендикулярны плоскостям декартова пространства) обращена к проекциям хода двух взаимно перпендикулярных приводов как третья ось декартова пространства, причем в каждом из трех гидрорезольверов гидродроссели-датчики сдвинуты по фазе на четверть оборота.
Недостатком известного гидроблока является то, что в нем не содержатся схемные решения взаимосвязи элементов гидроблока и комбинации их переключении.
Задачей изобретения является автоматизация подачи рабочего инструмента с постоянной технологической скоростью независимо от кривизны отслеживаемой траектории.
Эта задача решается за счет того, что гидроблок стабилизации скорости линейных гидроприводов трехкоординатной тележки адаптивного робота, имеющего четырехосный гироскоп с тремя гидрорезольверами и гидросистему, содержащий три одноименных с направлениями хода линейных приводов (X, Y и Z) гидрораспределителя 4/3 с закрытым центром и присоединенные к их входам тормозные гидродроссели, настроенные каждый на одинаковую технологическую скорость, выполнены так, что выход каждого гидрораспределителя 4/3 подключен к линии бака гидросистемы, а присоединенный к его входу тормозной гидродроссель соединен с выходом гидрораспределителя 3/2, поочередно подключающего к нему через два своих входа одноименные с гидрораспределителем 4/3 фазовые гидродроссели-датчики двух гидрорезольверов с разных осей гироскопа, и через них параллельно к линии высокого давления гидросистемы, причем одноименные гидродроссели-датчики расположены на осях, которыми образованы смежные углы гироскопа, и каждая из них обращена к проекциям направления хода двух взаимно перпендикулярных приводов как третья ось декартова пространства.
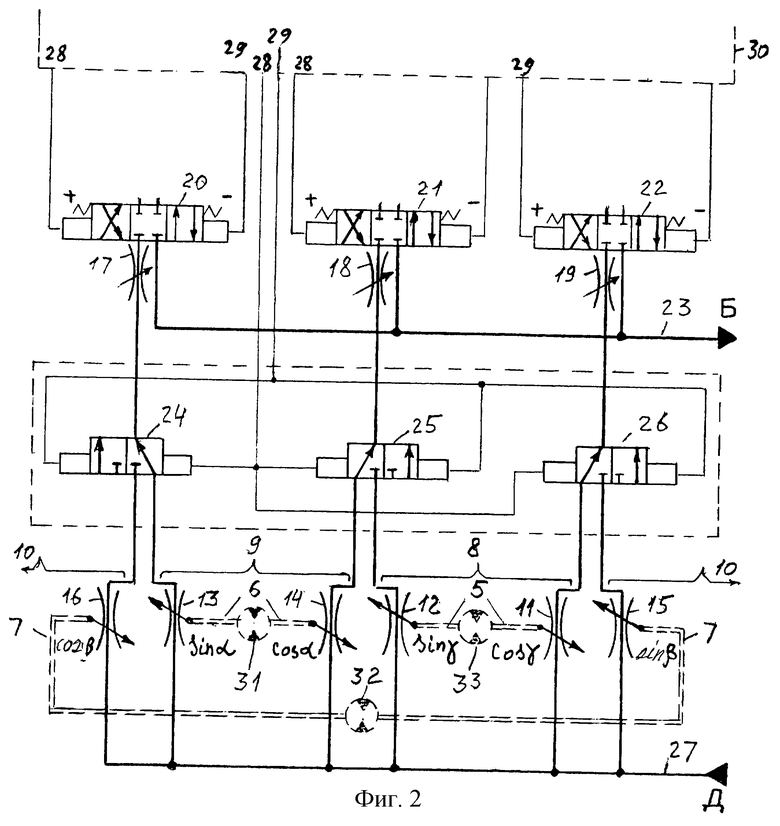
На фиг.1 упрощенно показан адаптивный робот в системе декартовых координат в предварительном рабочем положении.
На фиг.2 показана взаимосвязь элементов гидроблока и комбинации их переключении.
Гидроблок, входящий в гидросистему адаптивного робота, состоящего из трехкоординатной тележки 1 (фиг.1) с линейными гидроприводами (Х)2, (Z)3, (Y)4 и четырехосного гироскопа, на трех осях которого 5, 6 и 7 закреплено по гидрорезольверу 8, 9 и 10, состоящему из двух разноименных фазовых гидродросселей-датчиков: (RXcosγ)11-(RZsinγ) 12 в гидрорезольвере 8 на оси 5, (RYsinα)13-(RZcosα) 14 в гидрорезольвере 9 на оси 6, (RXcosβ)15-(RYsinβ) 16 в гидрорезольвере 10 на оси 7. Каждая пара (11-12, 13-14 и 15-16) гидродросселей-датчиков выполнена со сдвигом по фазе на 90o. Величины гидросопротивлений способны пропорционально изменяться от sin=0 до cos=1, где единица соответствует требуемой технологической скорости, на которую одинаково настроены все тормозные гидродроссели 17, 18 и 19, присоединенные к входам гидрораспределителей 4/3 (Y)20, (Z)21 и (Х)22 с нормальнозакрытым центром, одноименные с линейными гидроприводами.
Выходы гидрораспределителей 4/3 подключены к линии бака ("Б")23 гидросистемы. Каждый тормозной гидродроссель, присоединенный к входу гидрораспределителя 4/3, соединен с выходом гидрораспределителя 3/2 (24, 25 и 26), поочередно подключающего через два своих входа одноименные с гидрораспределителем 4/3 фазовые гидродроссели-датчики двух гидрорезольверов с разных осей гироскопа к линии ("Д") 27 высокого давления гидросистемы: к входам гидрораспределителя (Y)24-(RYsinβ) 16 с оси 7 и (RYsinα)13 с оси 6; к входам (Z)25-(RZsinγ)12 с оси 5 и (RZcosα)14 с оси 6; к входам (X)26-(RXcosγ)11 с оси 5 и (RXcosβ)15 с оси 7.
Тонкими линиями 28 и 29 показаны линии управления гидрораспределителями от блока 30 управления роботом.
Рабочий инструмент 34 (например, сварочные клещи) встроен в ротор гироскопа. На каждой его оси имеется свой привод: на оси 5 привод 33, на оси 6 привод 31 и на оси 7 привод 32.
Гидроблок стабилизации скорости линейных гидроприводов тележки адаптивного робота работает следующим образом.
Принципиальная схема гидроблока на фиг.2 показана в исходном рабочем положении в состоянии готовности к поперечной подаче рабочего инструмента 34 к точке А траектории АБВГД декартова пространства (фиг.1). По сигналу 28 логического блока 30 гидрораспределители 20 и 21 переключаются вправо. Гидрораспределитель 22 заблокирован в нейтральном положении. От линии 27 высокого давления "Д" поток жидкости через (RYsinα)13 и нормальнооткрытую линию гидрораспределителя 24 проходит к тормозному гидродросселю 17. Будучи переключенным вправо, гидрораспределитель 20 подает привод Y(4) вперед +у (см. фиг.1). Одновременно через (RZcosα)14 и нормальнооткрытую линию гидрораспределителя 25 поток жидкости проходит к тормозному гидродросселю 18. Еще при наладке (или при слежении по предыдущему изделию - автоматически) приводом 31 гидрорезольвер 9 на его оси 6 был повернут из начального в предварительное рабочее положение со смещением на угол Δα, и (RYsinα)13 оказался приоткрытым на величину Δα, т.е. sinα = 0+Δα, a (RZcosα)14 оказался прикрытым на ту же величину Δα и cosα = 1-Δα. Суммарный вектор скорости подачи рабочего инструмента 34 от доминирующего привода (Z)21 и от дополнительного (Y)20 равен: sinα+cosα = 1. Поперечная подача заканчивается, когда рабочий инструмент достигнет точки А (фиг.1). Тотчас логический блок 30 выдает команду 29 "продольно". Теперь блокируется в нейтральном положении гидрораспределитель (Z)21. Гидрораспределитель (Y)20 остается переключенным вправо, и вправо переключается гидрораспределитель (Х)22. Гидрораспределители 24, 25 и 26 переключаются во вторую позицию.
Теперь поток жидкости от линии 27 идет через гидродроссель-датчик (RYsinβ)16 к тормозному гидродросселю 17. Одновременно через гидродроссель-датчик (RXcosβ)15 поток жидкости проходит к тормозному гидродросселю 19. Оба гидродросселя 15 и 16 составляют один гидрорезольвер 10 на оси 7 привода 32, который при наладке или автоматически был заранее повернут со смещением от начального положения на угол Δβ. Теперь с тормозным гидродросселем 17 связан другой одноименный гидродроссель-датчик (RYsinβ)16, приоткрытый на угол Δβ и sinβ = 0+Δβ, a (RXcosβ) 15, оказавшийся приокрытым на угол Δβ, определил доминирующую скорость, пропорциональную cosβ = 1-Δβ, приводу (Х)2 (фиг.1). Суммарный вектор скорости следящей продольной подачи рабочего инструмента 34 при сложении синуса и косинуса переменного угла β всегда остается постоянным и равным условной единице, на которую настроены все тормозные гидродроссели.
При следящем движении по полупериметру АБВГД (фиг.1) поочередно блокируются то гидрораспределитель (Z)21, то (Х)22 (фиг.2) и меняют свою позицию гидрораспределители 24, 25 и 26 в зависимости от логики слежения то по углу β, то по углу α, то по углу γ (привод 33). Постоянной остается скорость рабочей подачи, всегда равная условной единице.
Так гидроблок выполняет условие стабилизации скорости подачи рабочего инструмента тремя линейными гидроприводами трехкоординатной тележки независимо от искривления траектории отслеживаемой линии.
По окончании слежения логический блок 30 вновь выдает сигнал 28 ("поперечно") и гидрораспределители 21 и 20, переключившись влево, подают потоки жидкости приводам (Z)3 и(Y)4, но на отвод рабочего инструмента от изделия. По окончании поперечного отвода гидрораспределители встают в нейтральное положение до следующего цикла.
Изобретение относится к области машиностроения, в частности к гидравлическим промышленным роботам со следящей адаптивной системой управления. Сущность изобретения: гидроблок трехкоординатной тележки адаптивного робота содержит гидрораспределители, которые связаны с тормозными гидродросселями линейных гидроприводов и с фазовыми гидродатчиками, установленными на осях гироскопа адаптивного робота. Реализация изобретения позволяет автоматизировать подачу рабочего инструмента с постоянной технологической скоростью независимо от кривизны отслеживаемой линии изделия. 2 ил.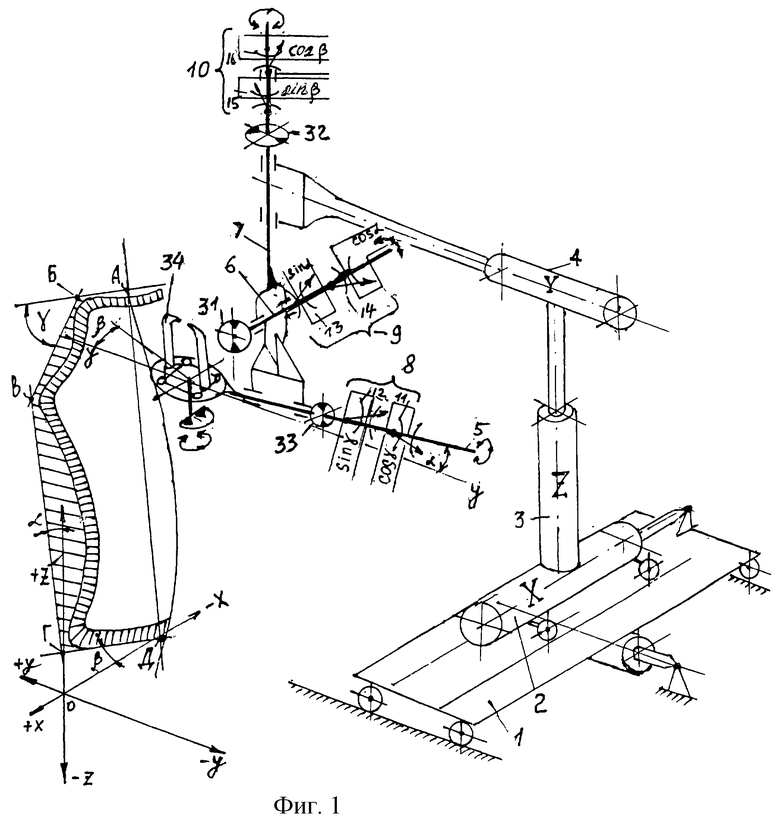
Гидроблок стабилизации скорости линейных гидроприводов трехкоординатной тележки адаптивного робота, включающего четырехосный гироскоп с тремя гидрорезольверами и гидросистему, содержащий три гидрораспределителя 4/3 с закрытым центром и присоединенные к их входам тормозные гидродроссели, настроенные каждый на одинаковую технологическую скорость, отличающийся тем, что выход каждого гидрораспределителя 4/3 подключен к линии бака гидросистемы, а присоединенный к его входу тормозной гидродроссель соединен с выходом гидрораспределителя 3/2, выполненный с возможностью поочередного подключения к нему через два своих входа одноименных с гидрораспределителем 4/3 фазовых гидродросселей-датчиков двух гидрорезольверов с разных осей гироскопа и через них параллельно к линии высокого давления гидросистемы, причем одноименные гидродроссели-датчики расположены на осях гироскопа, которые образуют его смежные углы и каждая из них обращена к проекциям направления хода двух взаимно перпендикулярных гидроприводов, как третья ось декартова пространства.
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU2028929C1 |
| ПАРИТЕТНЫЙ РАСПОЗНАВАТЕЛЬ | 2003 |
|
RU2230357C1 |
| US 4986074, 22.01.1991 | |||
| DE 3800990 A1, 27.07.1989. | |||

