Изобретение относится к измерительной технике и может применяться в микромеханических гироскопах, используемых в инерциальной навигации.
Известен чувствительный элемент микромеханического гироскопа [1], содержащий четыре подвижные массы, соединенные с помощью упругих Г-образных подвесов с внутренней рамкой и центром, соединенным четырьмя жесткими растяжками с внутренней рамкой, и внешнюю рамку, соединенную с внутренней рамкой четырьмя переходами.
Недостатком данного устройства является то, что конструкция чувствительного элемента предусматривает только выравнивание частот рабочих мод чувствительного элемента, посредством уменьшения жесткости упругих Г-образных подвесов, без возможности выравнивания добротности у рабочих мод, что в свою очередь проявляется в снижении точности.
Ближайшим аналогом является чувствительный элемент микромеханического гироскопа [2], содержащий основание, прямоугольную внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижных массы, каждая из которых соединена с центром двумя упругими Г-образными подвесами, а с внутренней рамкой шестью упругими Г-образными подвесами, внешнюю рамку, соединенную с внутренней рамкой четырьмя переходами. В местах соединения упругих Г-образных подвесов с центом и внутренней рамкой сформированы тонкие мембраны между упругими Г-образными подвесами и жесткими растяжками.
Недостатком данного устройства является то, что после начальной балансировки, производящейся уменьшением жесткости отдельных упругих Г-образных подвесов посредством подрезания части тонких мембран, производится более точное выравнивание частот рабочих мод резонатора с помощью частичного увеличения жесткости некоторых упругих Г-образных подвесов и массы подвижных частей за счет нанесения в профили вязкого клея. Вследствие чего увеличивается погрешность измерения угловой скорости при воздействии повышенных и пониженных температур, так как коэффициенты линейного расширения клея и материала резонатора различны. Это ведет к появлению разнодобротности и разночастотности рабочих мод резонатора, а, следовательно, к появлению температурной погрешности гироскопа.
Вторым недостатком является то, что предусмотренные в прототипе технологические элементы (тонкие мембраны) для дискретного измерения разночастотности путем уменьшения жесткости колебательной системы не обеспечивают точного сведения разночастотности и не предусматривают устранения разноамплитудности, которая также влияет на добротность чувствительного элемента и точность измерения угловой скорости.
Техническим результатом, на который направлено данное изобретение, является повышение точности измерения угловой скорости за счет того, что каждая из подвижных масс соединена с центром четырьмя упругими Г-образными подвесами, а с внутренней рамкой двенадцатью упругими Г-образными подвесами и при этом на углах каждого из упругих Г-образных подвесов закреплены гофрированные элементы.
На резонансные гармоники колебаний влияют подвижные массы, массы упругих Г-образных подвесов и гофрированных элементов.
Подвижные массы, гофрированные элементы, упругие Г-образные подвесы, внешняя и внутренняя рамки, центр и жесткие растяжки образуют резонансную систему с набором резонансных гармоник.
Повышение точности измерения угловой скорости достигается:
А) удвоением упругих Г-образных подвесов, которые используются в прототипе, при этом жесткость и масса резонансной системы остаются неизменными. Удвоение упругих Г-образных подвесов с сохранением упругих свойств по отношению к прототипу направлено на уменьшение прогрева подвеса вследствие его интенсивного движения. Это вызывает увеличение добротности резонансной системы за счет уменьшения термоупругого демпфирования вследствие снижения процесса перераспределения энергии из зоны сжатия в зону растяжения. Потеря добротности связана с повышением температуры подвесов и переходе части энергии колебательного контура во внутреннею (самонагрев мест максимальной деформации);
Б) устранением разнодобротности мод колебаний вследствие выравнивания амплитуд колебаний подвижных масс за счет удаления части гофрированных элементов. Наличие гофрированного элемента на каждом из 64 подвесов позволяет обеспечить полную балансировку. Она достигается за счет сведения разночастотности и разноамплитудности каждой пары масс во всех возможных направлениях путем удаления части гофрированных элементов.
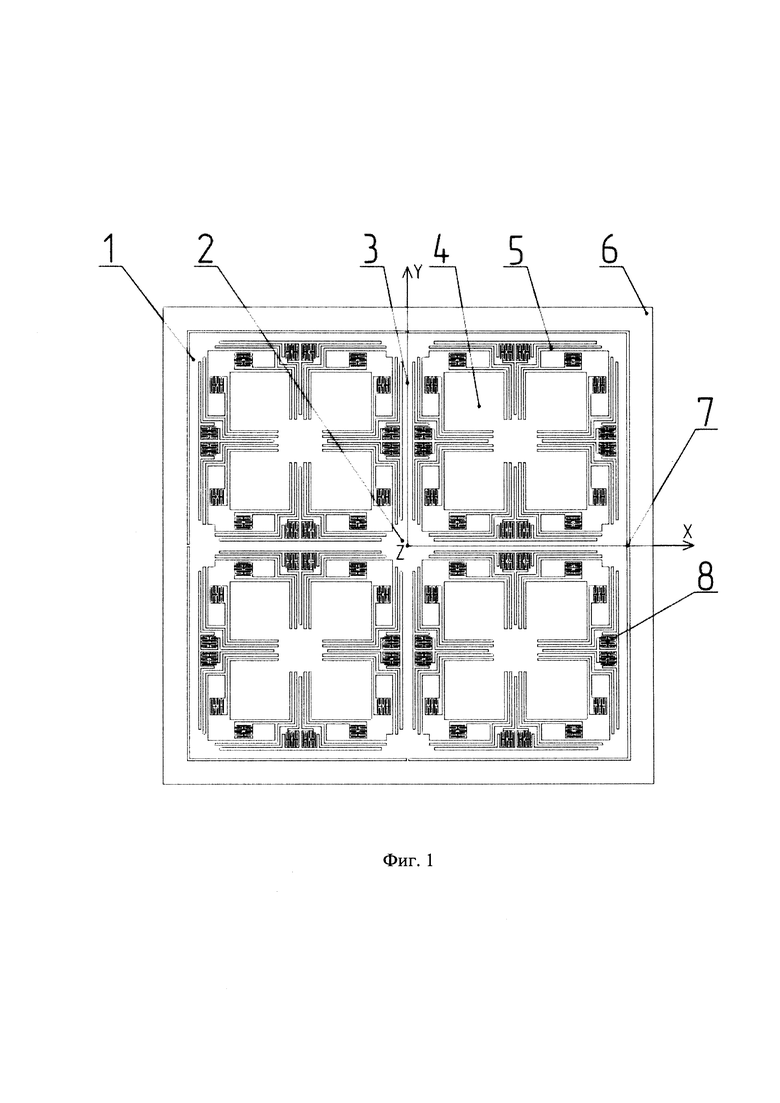
На фиг. 1 показан чувствительный элемент микромеханического гироскопа.
Чувствительный элемент микромеханического гироскопа содержит основание (не показано), внутреннюю рамку 1, центр 2, соединенный четырьмя жесткими растяжками 3 с внутренней рамкой, четыре подвижных массы 4, каждая из которых соединена с центром четырьмя упругими Г-образными подвесами 5, а с внутренней рамкой двенадцатью упругими Г-образными подвесами 5, внешнюю рамку 6, соединенную с внутренней рамкой четырьмя переходами 7, и гофрированные элементы 8, расположенные на углах каждого из упругих Г-образных подвесов.
Чувствительный элемент микромеханического гироскопа работает следующим образом. При включении прибора, возникает попарное перемещение подвижных масс по оси X на резонансной частоте, при этом в каждой паре участвуют смежные массы, которые двигаются навстречу друг другу, а непарные массы двигаются противофазно. При воздействии угловой скорости относительно оси Z на подвижные массы действует кориолисово ускорение, направление которого зависит от направления линейной скорости подвижных масс, а величина определяется величиной угловой скорости. Кориолисово ускорение преобразуется в знакопеременную кориолисову силу, которая перемещает каждую подвижную массу в направлении, перпендикулярном действующей в данный момент линейной скорости возбуждения и воздействующей внешней угловой скорости. При этом по оси Y детектируются перемежения подвижных масс, величины которых пропорциональны действующей угловой скорости.
Источники информации
1. Патент РФ №2423668, МПК G01C 19/56, 2006.01
2. Патент РФ №148254, МПК G01C 19/56, 2012.01 (ближайший аналог).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2009 |
|
RU2423668C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2301969C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2379630C1 |
| Способ управления четырехмассовым резонатором в микромеханическом гироскопе | 2023 |
|
RU2825192C1 |
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2003 |
|
RU2234679C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
Изобретение относится к измерительной технике и может применяться в микромеханических гироскопах с чувствительным элементом, содержащим основание, внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижных массы, каждая из которых соединена с центром и внутренней рамкой системой упругих Г-образных подвесов, внешнюю рамку, соединенную с внутренней рамкой четырьмя переходами. Техническим результатом является повышение точности измерения угловой скорости. 1 ил.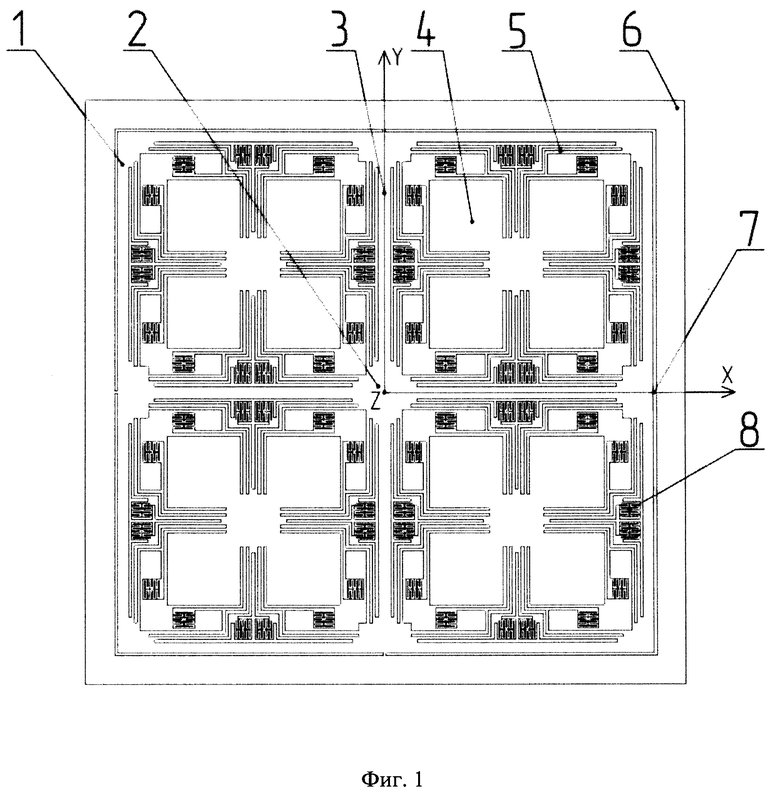
Чувствительный элемент микромеханического гироскопа, содержащий основание, внутреннюю рамку, центр, соединенный четырьмя жесткими растяжками с внутренней рамкой, четыре подвижных массы, каждая из которых соединена с центром и внутренней рамкой системой упругих Г-образных подвесов, внешнюю рамку, соединенную с внутренней рамкой четырьмя переходами, отличающийся тем, что каждая из подвижных масс соединена с центром четырьмя упругими Г-образными подвесами, а с внутренней рамкой двенадцатью упругими Г-образными подвесами и при этом на углах каждого из упругих Г-образных подвесов закреплены гофрированные элементы.
| Акустический способ для измерения расхода потоков жидкости или газа и устройство для его осуществления | 1961 |
|
SU148254A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2009 |
|
RU2423668C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| US 2006207327 A1, 21.09.2006. | |||
