1
Изобретение относится к кинофототехнике, а именно к операторским кранам, применяемым в комплекте с аппаратурой дистанционного управления киносъемочной или телевизчонной камеры.
Известны операторские краны с системой дистанционного управления камерой, содержащие стрелу, установленную с возможностью вертикального поворота вокруг оси, стягивающей щёки лиры, и выполненную в виде рычажно-щарнирного механизма с основной фермой, сдвоенные параллелограммы которой смещены между собой, площадку с панорамной головкой и камерой и контргрузы.
Для повышения надежности работы устройства путем изменения вылета стрелы и автоматического уравновешивания положения камеры в предлагаемом кране рычажно-шарнирный механизм снабжен дополнительной фермой, расположенной параллельно основной и жестко соединенной с нею стержнями, параллельными оси, а на оси и площадке установлены соответственно сельсин-датчик и сельсин-исполнитель системы дистанционного управления камерой.
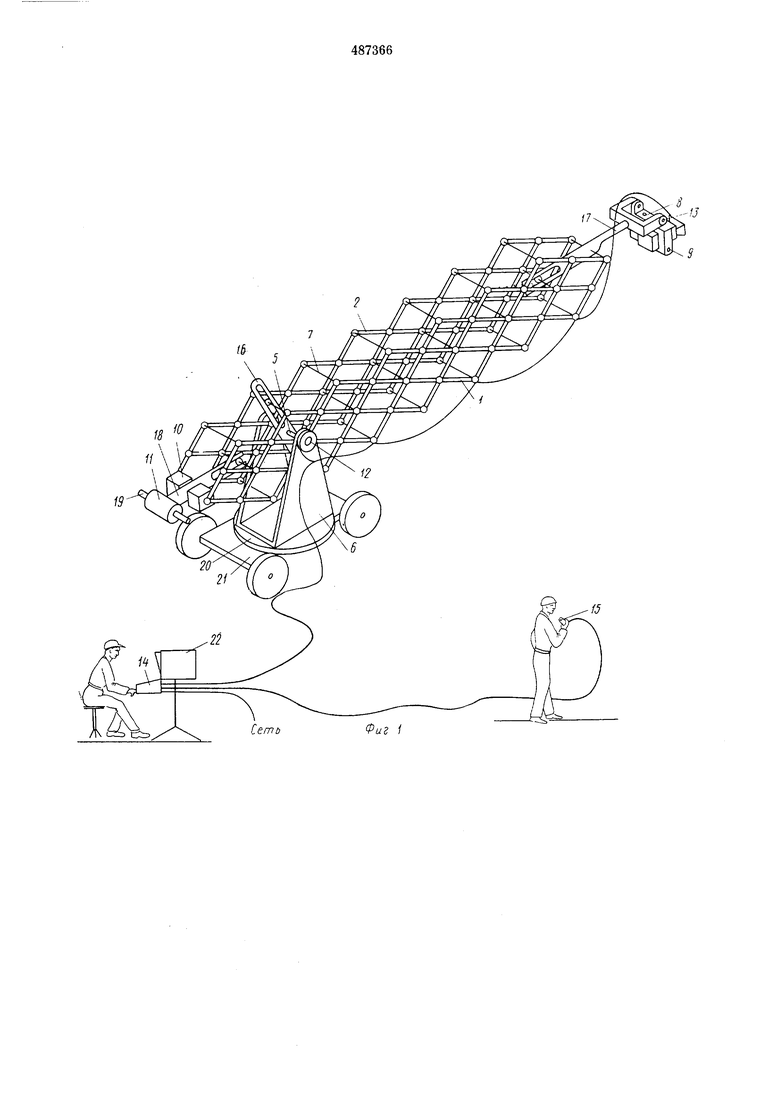
На фиг. 1 изображен предлагаемый кран, общий вид; на фиг. 2 - ферма.
Кран состоит из стрелы в виде рычажнощарнирного механизма с фермами: основной
2
1 и дополнительно 2, параллелограммами 3 и 4, смещенными по оси 5, лиры 6, стери-сней 7, площадки 8 с панорамной головкой 9, контргрузов 10 и 11, системы дистанционного управления в виде сельсина-датчика 12 и сельсина-исполнителя 13, пульта управления 14 и ручного пульта фокусирования 15.
Стрелка крана установлена на оси 5, сидящей на подшипниках в щеках лиры 6. На оси
5 жестко закреплено водило 16 с прямолинейной кулисой, через которую проходят верхняя и нижняя оси центральных звеньев рычажношарнирного механизма. Водило 16 в любом иоложении стрелы в вертикальной плоскости
всегда перпендикулярно оси стрелы и угол поворота центральной оси всегда равен углу подъема (опускания стрелы).
Панорамная головка 9 с камерой крепится к площадке 8, висящей на горизонтальном валу на кронштейне 17. Последний имеет кулису, благодаря которой положение центра тяжести головки 9 и кронщтейна 17 независимо от вылета стрелы не изменяется относительно оси фермы. На оси 5, стягивающей щеки лиры 6, установлен сельсин-датчик 12 угла поворота стрелы в вертикальной плоскости, который с сельсином-исполнителем 13, установленном на кронштейне 17, обеспечивает заданное (горизонтальное) положение площадки 8. В качестве механизма сохранения заданного (горизонтального) положения площадки 8 с головкой 9 может использоваться также кинематически замкнутая тросовая система; барабан на оси 5 с закрепленным на нем тросом, сходящие с него и свободно расположенные в гибких пружинных оплетках две ветви троса,- барабан на валу площадки 8 с охватывающими и закрепленными на нем двумя ветвями троса.
На хвостовой части стрелы находится контргруз 10, балансирующий вес стрелы, и на рычаге 18 - съемный контргруз И, балансирующий вес панорамной головки с камерой. На рычаге 18 расположены ручки 19 управления стрелой. Лира 6 установлена на вращающемся вокруг вертикальной оси на каретках диске 20. Кран установлен на четырехколесной тележке 21. В рабочем состоянии стрела тщательно балансируется.
Крановщик может соверщать панорамирование стрелой в вертикальной и горизонтальной плоскостях и изменять вылет стрелы. При этом можно получить сложные перемещения камеры в пространстве или, используя только одно движение - изменение вылета стрелы, производить наезды и отъезды без движения тележки крана, что очень важно при съемке в малогабаритных декорациях и при низких точках съемки. Оператор, находясь за пультом управления 14, может соверщать панорамирование камерой по вертикали и горизонтали, включение и контроль за работой камеры и визуальный контроль за снимаемым объектом по экрану монитора 22. Ассистент оператора, находясь непосредственно на съемочной площадке, дистанционно управляет фокусированием.
Предмет изобретения
1. Операторский кран с системой дистанционного управления камерой, содержащий стрелу, установленную с возможностью вертикального поворота вокруг оси, стягивающей щеки лиры, и выполненную в виде рычажнощарнирного механизма с основной фермой, сдвоенные параллелограммы которой смещены между собой, площадку с панорамной головкой и камерой и контргрузы, отличающийся тем, что, с целью повыщения надежности устройства, рычажно-шарнирный механизм снабж;ен дополнительной фермой, расположенной параллельно основной и жестко соединенной с нею стержнями, параллельными оси.
2. Операторский кран по п. 1, отличающийся тем, что на оси и площадке установлены соответственно сельсин-датчик и сельсин-исполнитель системы дистанционного управления камерой.
Приоритет исчислять с 12.02.72 г.
2
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
| ОПЕРАТОРСКИЙ СЕКЦИОННЫЙ ТЕЛЕСКОПИЧЕСКИЙ КРАН | 2004 |
|
RU2281907C1 |
| Операторский кран с дистанционно управляемой киносъемочной камерой | 1982 |
|
SU1100222A1 |
| ОПЕРАТОРСКИЙ КРАН | 1993 |
|
RU2041156C1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| ОПЕРАТОРСКИЙ КРАН | 2002 |
|
RU2228897C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |
| ОПЕРАТОРСКИЙ КРАН | 1990 |
|
RU2028271C1 |
| Подвесная операторская дорога | 1987 |
|
SU1500535A1 |
| Грузоподъемное устройство для железнодорожных рельсов или иного проката | 2023 |
|
RU2807780C1 |