1
Изобретение относится к области железнодорожного транспорта, в частности к работам, выполняемым Прн всех видах ремо,нта, а также при текущем содержании пути, реконструкции, строительстве и восстановлении железных дорог.
Известны способы выправки железнодорожного пути в плане и продольном профиле, основанные на использовании путевой машины с вышравочным и рихтовочным устройствами, работающими по программе, составленной на основе обработанных измерений параметров натурного состояния пути.
Однако по .известному способу не обеспечивается постановка пути в проектное пололсение.
Цель изобретения - обеспечение возможности постановки пути в проектное положение при его выцраВКе в плане .и продольном профиле за один проход путевой мащины по ремонтируемому участку. Это достигается тем, что в процессе перемещения путевой машины между смежными точками деления пути измеряют параметры натурного состояния пути и рассчитывают величины сдвигов и подъемки на отрезке пути, располол ен.ном .впереди путевой машины на расстоянии 0,050-0,150 км при неограниченной длине ремонтируемого участка, определяют программу работы механизмов сдвига и подъема па отрезке пути
между смежными точками деления, расположенного за указанными механизмами по направлению хода путевой машины, а рихтовку и выправку производят на отрезке пути между точками деления, для которых программа рассчитана при перемещении путевой машн11Ы предшествующими точками деления, и повторяют эти операции при каждом перемещении путевой машины от одной точки
деления к следующей.
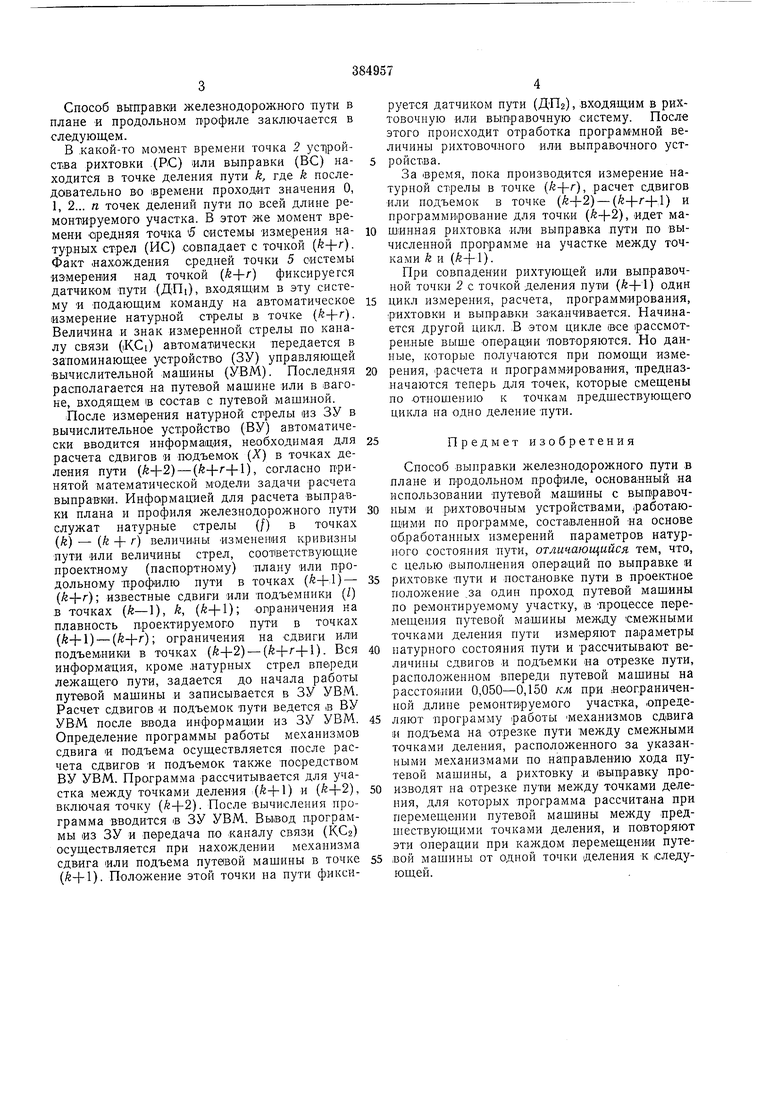
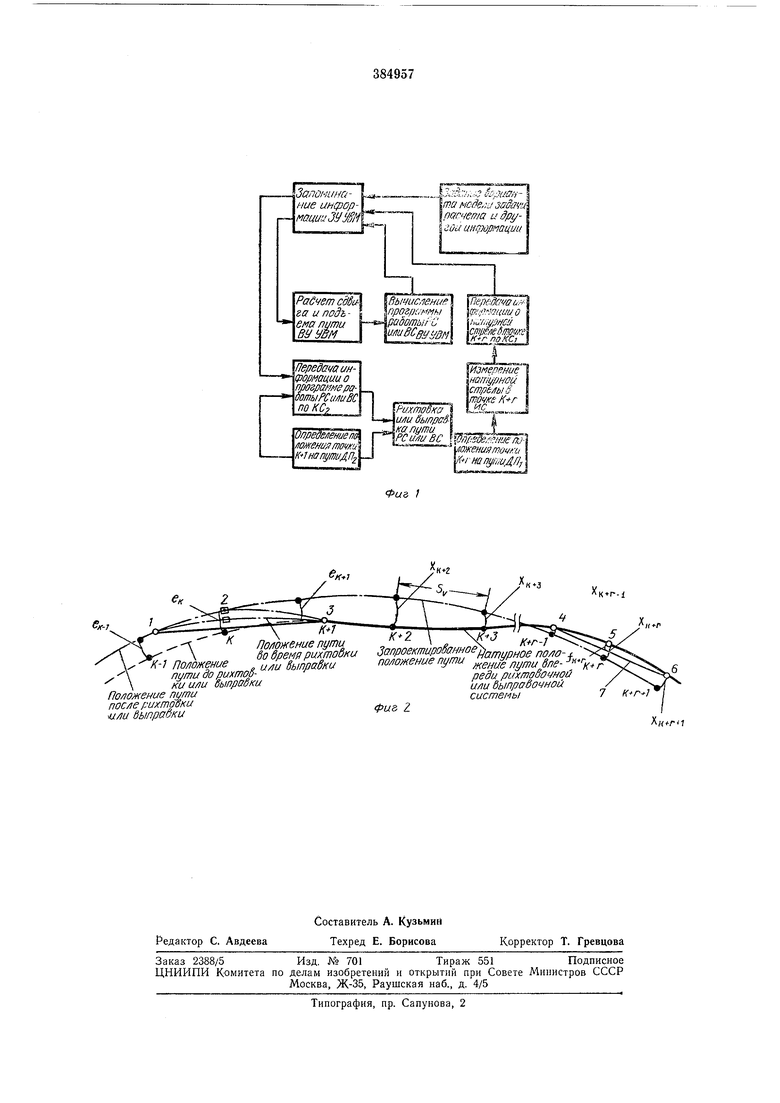
На фиг. 1 представлена блок-схема операций рыправки л елезнодорол пого пути в плане н продольно.м профиле при помощи рихтовочного НЛП выправочного устройства путевой машины с рассчетом программы в процессе вы.правки управляющей вычислительной машиной; на фиг. 2 - схема расположения рихтовочного или выправочяого устройства путевой машины на пути с рихтующей или
выправочной точкой 2 и измерительными точками 1 и 3. Здесь же показано расположение системы с точками 4, 5 и 6, предназначенными для измерения параметров стрел изгиба натурного состояния пути в горизонтальной и
вертикальной плоскостях в точка1Х деления пути, находящихся па равном расстояния (5 5-10 м) друг от друга. Система измерения с хордой 7 раснолол ена впереди устройства рихтовки или выправки па расстоянии
точек «г деления пути, где г 10.
Способ выправки железнодорожного пути в плане и продольном профиле заключается в следующем.
В какой-то момент времени точка 2 уст|ройст,ва рихтовки (PC) «ли выправки (ВС) находится в точке деления пути k, где k последовательно во времени проходит значения О, 1, 2... п точек делений пути по всей длине ремонтируемого участка. В этот же момент времени оредняя точ-ка 5 системы измерения натурных стрел (ИС) совпадает с точкой (. Факт нахождения средней точки 5 системы измерения над точкой () фиксируется датчиком пути (ДПО, входящим в эту систему и подающим команду на автоматическое измерение натурной стрелы в точке (). Величина и знак измеренной стрелы по каналу связи (iKCi) автоматически передается в запоминающее устройство (ЗУ) управляющей вычислительной машины (УВМ). Последняя располагается на путевой машине или в вагоне, входящем IB состав с путевой машиной.
:После измерения натурной стрелы из ЗУ в вычислительное устройство (ВУ) автоматически вводится информащия, необходимая для расчета сдвигов и подъемок (X) в точках деления пути (+2) - (fe+r+l), согласно принятой математической модели задачи расчета выправтаи. Информацией для расчета выправки плана и профиля железнодорожного пути служат натурные стрелы (/) в точках (k) - (k г) величины изменения кривизны пути или величины стрел, соотйетствующие проектному (паспортному) плану или продольному Профилю пути в точках ()- (k-}-r); известные сдвиги или подъемники (/) в точках (k-1), k, ( ограничения на плавность проектируемого пути в точках (/г+1) - (); ограничения на сдвиги или подъемники в точках (fe+2) -(й+r-f 1). Вся информация, кроме натурных стрел впереди лежащего пути, задается до начала работы путевой машины и записывается в ЗУ УВМ. Расчет сдвигов и подъемок пути ведется в ВУ УВМ после ввода информации из ЗУ УВМ. Определение программы работы механизмов сдвига и подъема осуществляется после расчета сдвигов И подъемок также посредством ВУ УВМ. Программа рассчитывается для участка между точками деления ( и (fe-|-2), включая точку (k-{-2. После вычисления программа вводится в ЗУ УВМ. Вывод программы из ЗУ и передача по каналу связи (КС2) осуществляется при нахождении механизма сдвига или подъема путевой машины в точке (й+1). Положение этой точки на пути фиксируется датчиком пути (ДПа), входящим в рихтовочную или выправочную систему. После этого происходит отработка программной величины рихтовочного или выправочного устройства.
За время, пока производится измерение натурной стрелы в точке (k-{-r), расчет сдвигов или подъемок в точке (й-|-2) - () и программирование для точки (й+2), идет машинная рихтовка «ли выправка пути по вычисленной программе на участке между точками k и (fe+l)При совпадении рихтующей или выправочной точки 2 с точкой деления пути (fe+1) один цикл измерения, расчета, программирования, рихтовки и выправки заканчивается. Начинается другой цикл. В этом цикле все рассмотренные выше операции повторяются. Но данные, которые получаются при помощи измерения, расчета и программирования, предназначаются теперь для точек, которые смещены по отношению к точкам предшествующего цикла на одно деление пути.
Предмет изобретения
Способ выправки железнодорожного пути в плане и продольном профиле, основанный на использовании путевой .машины с выправочным и рихтовочным устройствами, работающими по программе, составленной на основе обработанных измерений параметров натурного состояния пути, отличающийся тем, что, с целью выполнения операций по выправке и рихтовке пути и постановке пути в проектиое положение ,за один проход путевой машины по ремонтируемому участку, в Процессе перемещения путевой машины между смежными точками деления пути измеряют параметры натурного состояния пути и рассчитывают величины сдвигов и подъемки иа отрезке пути, расположенном впереди путевой машины на расстоянии 0,050-0,150 км при неограниченной длине ремонтируемого участка, определяют Программу работы механизмов сдвига :и подъема на отрезке пути между смежными точками деления, расположенного за указанными механизмами по направлению хода путевой машины, а рихтовку и вьшравку прОизводят на отрезке пупи между точками деления, для которых программа рассчитана при перемещении путевой машины между предшествующими точками деления, и повторяют эти операции при каждом перемещении путевой машины от одной точки деления к следующей.
та мсде,-:и sadavu расчета и dpt/гои ин/ро/л ации
Вычис,1ени(;
прогриты
радотыгС
UMSCffuyfff.;,
измерение натурной стрбюо
fnOVKS
ис
РцхтоВха U/1U дыпрсй т . j KMyAK / /;;//-//
rhiint/fi/u fl,
Л №%УА К-1 По/южение .. или выправки пити до рихтор ки или выправки Положение пути noc/ie рихтобки ,u/iu дыпрабки
7
и жЖ Г - - Чпо/южение пути f y fjgng. реди puxmooowqu им дыправочной системы ф 2
