Предлагаемое изобретение относится к обучающим устройствам и может быть использовано в тренажерах для наземного транспорта или в других тренажерах динамических объектов для воспроизведения усилий на органах управления имитируемого объекта (автомобиля).
Известно устройство имитатора рычага управления самолетом, содержащее рычаг с рукояткой на одном конце и сферой на другом, которая расположена между двумя пластинами, передающими на нее фрикционные силы, затрудняющие ее вращение, но не препятствующие ее вращению при манипулировании рукояткой рычага (1).
Недостатками данного устройства являются линейная характеристика загрузки органа управления и невозможность дистанционно изменять нагрузочную характеристику.
Наиболее близким к предлагаемому изобретению является адаптивный имитатор загрузки на рычагах управления авиационного тренажера. Имитатор содержит рычаг управления, например ручку управления, включающую ось вращения ручки управления с установленной на ней вилкой, при этом рычаг управления кинематически связан с датчиком его перемещений, вычислительным комплексом, системой управления двигателем и загрузочным устройством. Рычаг дополнен полой осью вращения вилки, выполненной заодно с вилкой, при этом полая ось вращения вилки и ось вращения ручки управления снабжены жестко установленными на них направляющими тросовой проводки сегментами загрузки, расположенными в двух перпендикулярных плоскостях, которые кинематически связаны с электродвигателями загрузочного устройства, например, по тангажу и крену посредством тросовой проводки, при этом тросовая проводка проходит внутри полой оси вращения вилки (2).
Загрузка органов управления в данном устройстве осуществляется электродвигателями загрузочных устройств, каждый из которых снабжен системой управления.
Недостатком данного устройства является сложная система управления загрузочными электродвигателями, работающими в режиме противовключения, и, следовательно, удорожание конструкции имитатора в тех случаях, когда по начальным условиям не требуется воспроизведение сложной загрузочной характеристики.
Существует большое количество органов управления, для имитации работы которых загрузочная характеристика имеет только два режима - штатный и аварийный.
Задачей изобретения является упрощение конструкции, удешевление стоимости имитатора загрузки при сохранении заданных нагрузочных характеристик.
Поставленная задача достигается тем, что в имитаторе загрузки рычага управления транспортным средством, содержащем загрузочное устройство, рычаг управления, соединенный через датчик положения с вычислительным комплексом, который электрически связан с системой управления загрузочного устройства, загрузочное устройство выполнено в виде пружинного механизма со штоком и поршнем и с установленными на штоке основной и дополнительной загрузочными пружинами с одной стороны от поршня и возвратной пружиной с другой стороны, система управления загрузочного устройства содержит электромагнит, причем рычаг управления жестко связан со штоком, а поршень выполнен с пазом, в котором перемещается запорная подпружиненная планка, взаимодействующая со штоком и управляемая электромагнитом, установленным на загрузочном устройстве.
Применение в загрузочном устройстве двух загрузочных пружин позволяет обеспечить заданную загрузочную характеристику, изменяемую на различных участках хода рычага, а применение управляемой планки, связывающей шток с поршнем, позволяет при необходимости обеспечить другую загрузочную характеристику, соответствующую взаимодействию рычага только с возвратной пружиной.
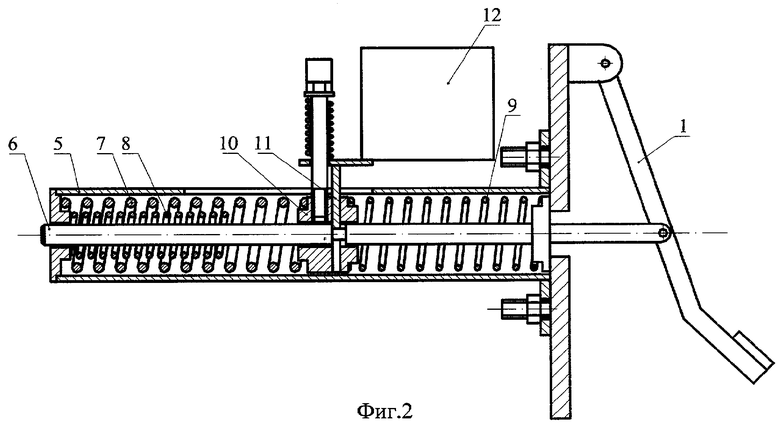
На фиг.1 представлена блок-схема имитатора загрузки на рычаге управления транспортным средством.
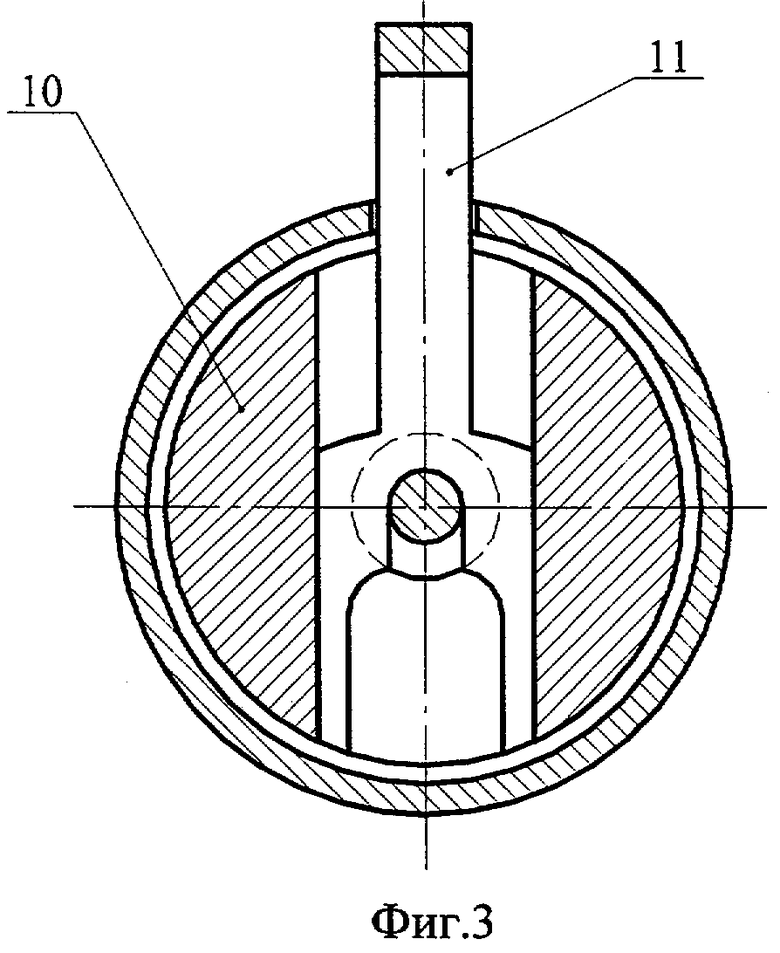
На фиг.2 представлено загрузочное устройство с рычагом управления транспортным средством.
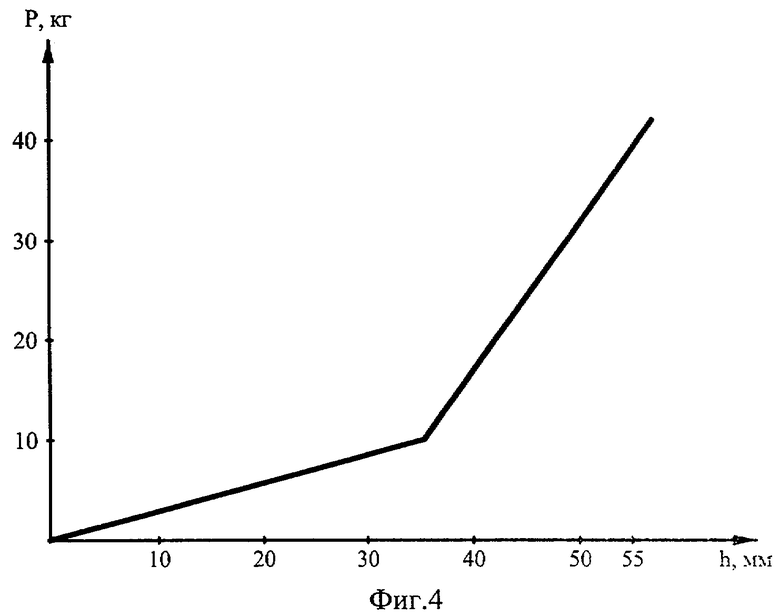
На фиг.3 - разрез поршня загрузочного устройства с установкой запорной планки.
На фиг.4 - загрузочная характеристика устройства при взаимодействии рычага с основной и дополнительной загрузочными пружинами.
Имитатор загрузки рычага управления транспортным средством представляет собой устройство, состоящее из рычага управления 1, кинематически связанного с датчиком положения 2, который, в свою очередь, электрически связан с вычислительным комплексом 3 и системой управления загрузочного устройства 4 (фиг.1).
Загрузочное устройство состоит из корпуса 5, штока 6, основной 7 и дополнительной 8 загрузочных пружин и возвратной пружины 9, которые взаимодействуют с поршнем 10 (фиг.2).
Поршень 10 загрузочного устройства выполнен с пазом, в котором установлена подпружиненная планка 11 (фиг.3).
Для перемещения подпружиненной планки 11 на загрузочном устройстве 5 установлен электромагнит 12 системы управления загрузочным устройством.
Устройство работает следующим образом.
В исходном состоянии запорная планка 11 находится в нижнем положении, т.е входит в паз штока 6 и тем самым связывает шток 6 с поршнем 10. При перемещении рычага 1 шток 6 перемещается вместе с поршнем 10, взаимодействуя с основной загрузочной пружиной 7. Так происходит на первом участке хода рычага управления, пока поршень 10 не начинает взаимодействовать с дополнительной загрузочной пружиной 8. Усилия обеих пружин складываются и загрузочная характеристика на втором участке хода рычага управления становится намного жестче (фиг.4).
При введении внештатной ситуации, например отказа системы управления, и как следствие значительное уменьшение усилия на рычаге управления с вычислительного комплекса 2 на электромагнит 12 системы управления загрузочным устройством подается сигнал. Он переводит запорную планку 11 в верхнее положение и выводит ее из зацепления со штоком 6, т.е. шток 6 и поршень 10 становятся разомкнутыми, при этом при перемещении рычага 1 шток 6 не взаимодействует с поршнем 10 и загрузочными пружинами 7,8 и перемещению рычага 1 противодействует только возвратная пружина 9.
Жесткость возвратной пружины 9 существенно меньше, чем жесткость загрузочных пружин 7 и 8, и при ее сжатии создается усилие, достаточное только для возврата рычага 1 в исходное положение.
Таким образом, предлагаемый имитатор загрузки на рычаге управления транспортным средством позволяет создать штатную загрузочную характеристику, нелинейно изменяющуюся на разных участках хода управления транспортным средством и дополнительной загрузочной характеристикой, соответствующей работе рычага управления при введении внештатной ситуации. При этом система управления загрузочным устройством значительно упрощается и сводится к двухпозиционной системе, подающей или отключающей питание электромагнита системы управления загрузочного устройства.
Опытный образец предложенного устройства был использован в качестве имитатора загрузки педали тормоза, изготовлен и прошел испытание на тренажере массового автомобиля, разработанным Донским филиалом Центра тренажеростроения, г.Новочеркасск.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2263352C1 |
| ПРИВОД УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2007 |
|
RU2347695C1 |
| Устройство для поштучной выдачи длинномерных заготовок | 1983 |
|
SU1142376A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| АНТИБЛОКИРОВОЧНАЯ, ПРОТИВОЗАНОСНАЯ, ПРОТИВОМИКСТНАЯ ТОРМОЗНАЯ СИСТЕМА | 2003 |
|
RU2258619C2 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Акустический прибор | 2017 |
|
RU2660174C1 |
| Механизм расфиксации зацепляющего штыря имитатора отрывной платы | 2017 |
|
RU2681803C2 |
| Устройство для обучения трактористов | 1980 |
|
SU1040508A1 |
Изобретение относится к тренажерным устройствам и может быть использовано в тренажерах для наземного транспорта или тренажерах других типов транспортных средств для воспроизведения усилий на органах управления имитируемого объекта. Устройство содержит загрузочное устройство и рычаг управления. Загрузочное устройство выполнено в виде пружинного механизма со штоком и поршнем и с установленными на штоке основной и дополнительной загрузочными пружинами с одной стороны от поршня и возвратной пружиной с другой стороны. Рычаг управления жестко связан со штоком, а поршень выполнен с пазом, в котором перемещается запорная подпружиненная планка, взаимодействующая со штоком и управляемая электромагнитом. При этом он соединен через датчик положения с вычислительным комплексом, который электрически связан с системой управления загрузочного устройства. Технический результат заключается в упрощении конструкции, удешевлении стоимости имитатора при сохранении заданных загрузочных характеристик. 4 ил.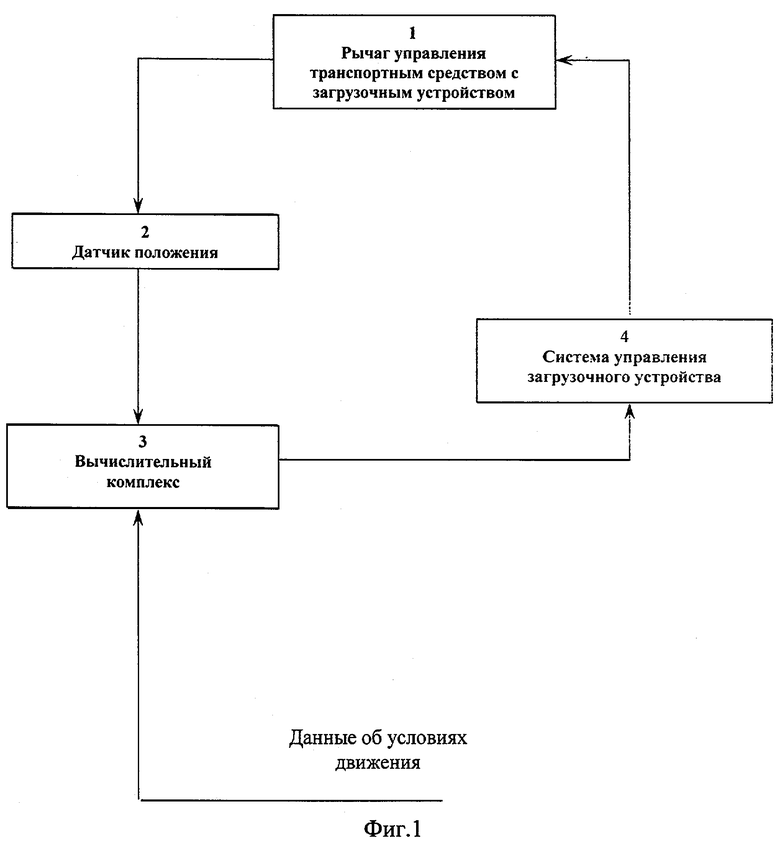
Имитатор загрузки рычага управления транспортным средством, содержащий загрузочное устройство, рычаг управления, соединенный через датчик положения с вычислительным комплексом, который электрически связан с системой управления загрузочного устройства, отличающийся тем, что загрузочное устройство выполнено в виде пружинного механизма со штоком и поршнем и с установленными на штоке основной и дополнительной загрузочными пружинами с одной стороны от поршня и возвратной пружиной с другой стороны, система управления загрузочного устройства содержит электромагнит, причем рычаг управления жестко связан со штоком, а поршень выполнен с пазом, в котором перемещается запорная подпружиненная планка, взаимодействующая со штоком и управляемая электромагнитом, установленным на загрузочном устройстве.
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
| US 5499919 А, 19.03.1996 | |||
| Устройство к автоматическому ткацкому станку для смены шпуль | 1935 |
|
SU43575A1 |
| Имитатор рулевого управления тренажера транспортного средства | 1981 |
|
SU980123A1 |
| Загрузочное устройство рычага управления авиационного тренажера | 1974 |
|
SU490156A1 |
| Имитатор рулевого управления тренажера транспортного средства | 1983 |
|
SU1096684A2 |

