Предлагаемое изобретение относится к области навигационных систем, а более конкретно к инерциально-спутниковой навигационной системе (ИСНС) и может быть использовано при создании интегрированных ИСНС, имеющих точность определения навигационных параметров выше, чем у интегрируемых в ее составе инерциальной навигационной системы (ИНС) и приемника спутниковой навигационной системы (СНС), а также способных с высоким быстродействием непрерывно определять текущие ошибки по скорости ИНС, сглаживать шумы и устранять влияние систематических ошибок приемника СНС на точность интегрированного канала навигации.
Известны интегрированные ИСНС, в которых интеграция ИНС и приемника СНС осуществляется на основе метода математического комплексирования с использованием фильтра Калмана или его модификаций. Например, ИСНС LN-100G фирмы LittoN (США), LASEREF SM и H764G фирмы HoNeywell (США), ЭИ “Авиационные системы и приборы” №1, 1994 г., а также ИСНС IRS45 фирмы Sagem (Франция), ЭИ “Авиационные системы и приборы” №24, 1990 г. и другие.
Недостатками этих ИСНС являются:
- точность ИСНС не может быть выше точности приемника СНС, так как интеграция при математическом комплексировании осуществляется для оценки ошибок ИНС и последующей их коррекции с использованием навигационных параметров приемника СНС;
- отсутствие интегрированного канала навигации;
- необходимость получения достоверных априорных данных по математической модели и статистике погрешностей ИНС, что требует дополнительных затрат;
- существенно большое время (15-20 минут) для оценки составляющих ошибок ИНС, в частности ее дрейфов;
- низкая функциональная надежность фильтра Калмана из-за потери устойчивости в динамических режимах и при недостоверности априорных данных;
- сложное программно-математическое обеспечение.
Известна также комбинированная ИСНС, спроектированная на основе способа физического комплексирования (см., например, патент РФ №2082098 с приоритетом от 23.09.93 г.).
Известная комбинированная система имеет следующие недостатки:
- определяется не полная ошибка по скорости ИНС, а только ее часть (постоянная составляющая горизонтальных дрейфов), причем для этого требуется определенное время;
- управляющие и корректирующие сигналы от приемника СНС подаются на гироскопы горизонтальных каналов ИНС и в случае наличия сильных помех или сбоев в этих сигналах ИНС может терять функциональную надежность и не обеспечивать требуемой точности;
- необходимость аппаратурно-алгоритмической реализации каналов управления контуром Шулера от приемника СНС.
Кроме того, известна ИСНС (см., например, патент РФ №2148796 с приоритетом от 05.11.98 г.), которая по своей технической сущности и достигаемым результатам может быть выбрана в качестве прототипа.
Эта инерциально-спутниковая навигационная система содержит инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления навигационных параметров, кроме того, ее каждый горизонтальный канал включает первый, второй, третий, четвертый и пятый сумматоры, фильтр коррекции, первый интегратор с обратной связью, второй интегратор без обратной связи, фильтр управления, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления навигационных параметров и с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы первых сумматоров соединены со входами фильтров коррекции, выходы которых соединены с первыми входами пятых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы пятых сумматоров соединены со входами вторых интеграторов без обратной связи, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами первых интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами первых интеграторов с обратной связью и входами фильтров управления, вторые выходы первых интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами первых интеграторов с обратной связью.
Известная система имеет следующие недостатки:
- точность определения координат местоположения в интегрированном инерциально-спутниковом режиме навигации зависит от систематической ошибки по скорости приемника СНС;
- выделяемая текущая ошибка по скорости ИНС содержит систематическую ошибку по скорости приемника СНС;
- существует ограничение на использование в составе ИСНС сравнительно недорогих приемников СНС, имеющих систематические ошибки, что не позволяет снизить себестоимость системы и расширить область применения.
Сущность изобретения состоит в том, что в инерциально-спутниковой навигационной системе, содержащей инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления навигационных параметров, два горизонтальных канала, кроме того, в каждом горизонтальном канале первый, второй, третий, четвертый и пятый сумматоры, фильтр коррекции, первый интегратор с обратной связью, второй интегратор без обратной связи, фильтр управления, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления навигационных параметров и с первыми входами первых сумматоров, а выходы первых сумматоров соединены со входами первых фильтров коррекции, выходы которых соединены с первыми входами пятых сумматоров, выходы которых соединены со входами вторых интеграторов без обратной связи, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами первых интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами первых интеграторов с обратной связью и входами фильтров управления, вторые выходы первых интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами первых интеграторов с обратной связью, в каждый горизонтальный канал инерциально-спутниковой навигационной системы дополнительно включены шестой сумматор, второй фильтр коррекции и блок задержки, причем выходы шестых сумматоров соединены со вторыми входами первых и пятых сумматоров, а первые выходы по скорости приемника спутниковой навигационной системы соединены с первыми входами вторых фильтров коррекции и с первыми входами шестых сумматоров, вторые входы которых соединены с выходами блоков задержки, входы которых соединены с выходами вторых фильтров коррекции, вторые входы которых соединены со вторыми выходами по координатам приемника спутниковой навигационной системы.
Технический результат изобретения - достижение точности интегрированной ИСНС выше, чем у комплексируемых в ее составе ИНС и приемника СНС, повышение точности выделения текущей ошибки по скорости ИНС, снижение ее себестоимости за счет использования сравнительно недорогих, грубых ИНС и приемников СНС, которые наряду с шумами могут иметь систематические ошибки, расширение области применения для объектов различного типа.
Указанный технический результат достигается тем, что осуществляется коррекция горизонтальных составляющих скорости приемника СНС с использованием его координат и в контур интегрированного канала навигации ИСНС вместо скоростей приемника СНС поступают его скорректированные скорости с заданной задержкой корректирующего сигнала, формируемого вторым фильтром коррекции, в результате чего исключается влияние не только шумов, но и систематических ошибок по скорости и координатам приемника СНС на точность интегрированного канала навигации ИСНС.
Сущность изобретения поясняется чертежами (фиг.1-13).
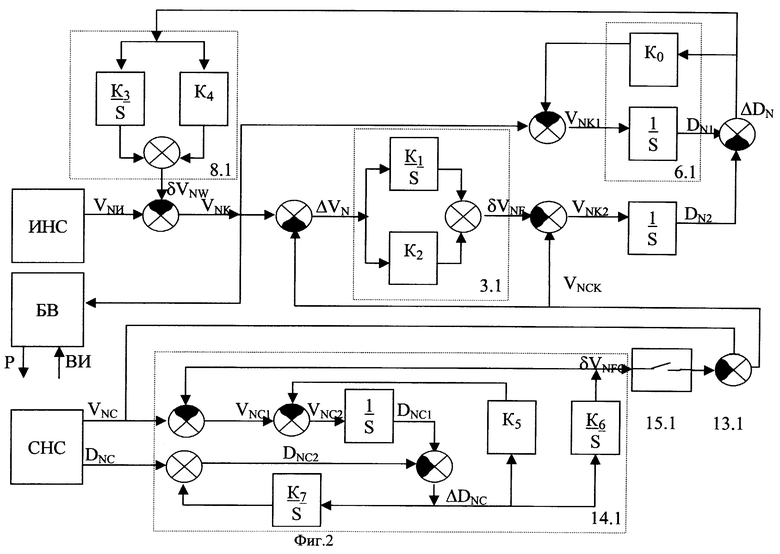
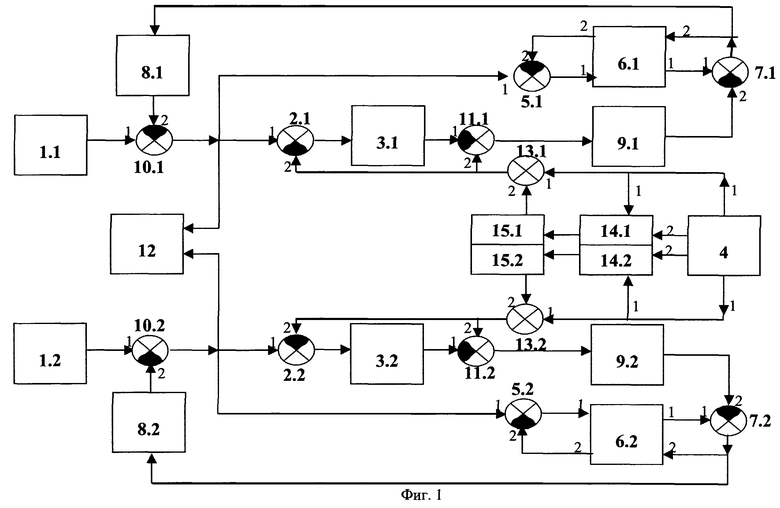
На фиг.1 схематично показаны состав ИСНС и связи между блоками.
На фиг.2 приведена функциональная схема одного из двух идентичных горизонтальных канала ИСНС.
На фиг.3-9 графически изображены точностные характеристики ИСНС, полученные при моделировании ее работы в конкретных условиях эксплуатации, а на фиг.10-13 приведены результаты лабораторного эксперимента на макете ИСНС.
ИСНС содержит (фиг.1):
1.1, 1.2 - горизонтальные каналы ИНС с контуром Шулера;
2.1, 2.2 - первые сумматоры;
3.1, 3.2 - первые фильтры коррекции;
4 - приемник СНС;
5.1, 5.2 - вторые сумматоры;
6.1, 6.2 - первые интеграторы с обратной связью;
7.1, 7.2 - третьи сумматоры;
8.1, 8.2 - фильтры управления;
9.1, 9.2 - вторые интеграторы без обратной связи;
10.1, 10.2 - четвертые сумматоры;
11.1, 11.2 - пятые сумматоры;
12 - блок вычисления навигационных параметров;
13.1, 13.2 - шестые сумматоры;
14.1, 14.2 - вторые фильтры коррекции;
15.1, 15.2 - блоки задержки.
На фиг.2 приняты следующие обозначения:
VNИ, VЕИ, VNC, VEC, VNK, VEK - линейные относительные скорости ИНС, приемника СНС и интегрированного канала ИСНС по горизонтальным осям географической системы координат;
VNCK, VECK - скорректированные линейные скорости приемника СНС;
δVNFС, δVEFC - сигналы на коррекцию скорости приемника СНС (выходные сигналы второго фильтра коррекции);
δVNW, δVEW - сигналы с выхода фильтра управления (выделяемые текущие ошибки по скорости ИНС);
δVNF, δVEF - сигналы с выхода первого фильтра коррекции;
DNC, DEC - приращение координат местоположения приемника СНС по осям N, Е относительно начальных значений;
k1, k2 - коэффициенты первого фильтра коррекции;
k3, k4 - коэффициенты фильтра управления;
k5, k6, k7 - коэффициенты второго фильтра коррекции;
k0 - коэффициент усиления обратной связи первого интегратора;
БВ - блок вычисления навигационных параметров интегрированного канала навигации;
Р - выходные навигационные параметры ИСНС;
ВИ - входная информация и исходные данные, необходимые для работы ИСНС;
1/S - символ интегрирования;
S - оператор Лапласа.
Пунктиром на фиг.2 выделены структурные схемы фильтра управления (8.1), первого фильтра коррекции (3.1), первого интегратора с обратной связью (6.1), второго фильтра коррекции (14.1).
Блок задержки (15.1) представляет собой релейный переключатель, который включается по окончании переходного процесса с заданной задержкой по времени (15-20 секунд) после начала работы ИСНС, в результате чего устраняется влияние систематической ошибки по координате приемника СНС на точность интегрированного канала навигации ИСНС.
Инерциально-спутниковая навигационная система работает следующим образом (фиг.1, 2).
Скорости VNИ, BEИ с горизонтальных каналов ИНС 1.1, 1.2 в географической системе координат направляют в сумматоры 10.1, 10.2, где к ним добавляют сигналы компенсации ошибок по скорости ИНС (δVNW, δVEW) с фильтров управления 8.1, 8.2. Интегрированные скорости (VNK, VEK) с выхода сумматоров 10.1, 10.2 поступают в блок вычисления навигационных параметров 12 (БВ) на алгоритм навигации интегрированного канала ИСНС, который по этим скоростям определяет местоположение объекта. Сигналы компенсации ошибок ИНС (δVNW, δVEW) формируют с использованием скорректированных скоростей приемника СНС (VNCK, VECK), для чего интегрированные скорости (VNK, VEK) с выхода сумматоров 10.1, 10.2 направляют в сумматоры 2.1, 2.2, где их сравнивают с аналогичными скорректированными скоростями приемника СНС (VNCK, VECK), с выхода сумматоров 2.1, 2.2 разности скоростей (ΔVN, ΔVE) поступают на первые фильтры коррекции 3.1, 3.2, сигналы с их выхода (δVNF, δVEF) поступают на сумматоры 11.1, 11.2, где к ним добавляют соответствующие скорректированные скорости приемника СНС (VNCK, VECK), с выхода сумматоров 11.1, 11.2 сигналы поступают через вторые интеграторы без обратной связи 9.1, 9.2 на второй вход сумматоров 7.1, 7.2, на первый вход которых поступают сигналы с первого входа первых интеграторов с обратной связью 6.1, 6.2, сигналы с выхода сумматоров 7.1, 7.2 поступают на второй вход первых интеграторов с обратной связью 6.1, 6.2, со второго выхода которых сигналы поступают на второй вход сумматоров 5.1, 5.2, а на их первый вход поступают сигналы с выхода сумматоров 10.1, 10.2, сигналы с выходов сумматоров 5.1, 5.2 поступают на первый вход первых интеграторов с обратной связью 6.1, 6.2, одновременно сигналы с выходов сумматоров 7.1, 7.2 поступают на вход фильтров управления 8.1, 8.2, которые формируют сигналы компенсации ошибок по скорости ИНС. Скорректированные скорости приемника СНС (VNCK, VECK) формируют с использованием выходных сигналов (δVNCK, δVECK) вторых фильтров коррекции 14.1, 14.2, для чего скорости (VNC, VEC) с первого выхода приемника СНС 4 направляют на первый вход вторых фильтров коррекции 14.1, 14.2, а на их второй вход направляют приращение координат (DNC, DEC) со второго выхода приемника СНС, сигналы коррекции (δVNFc, δVEPC) c выхода вторых фильтров коррекции 14.1, 14.2 через блоки задержки 15.1, 15.2 поступают на второй вход шестых сумматоров 13.1, 13.2, на первый вход которых поступают скорости (VNC, VEC) с первого выхода приемника СНС 4, на выходе шестых сумматоров 13.1, 13.2 получаем скорректированные скорости приемника СНС (VNCK, VECK).
Технический результат достигается следующим образом.
В соответствии с фиг.2 работу интегрированного канала ИСНС по одному из двух идентичных горизонтальных каналов можно описать следующей системой уравнений в преобразовании Лапласа (в операторной форме):
VNИ(S)=VN(S)+δVNИ(S)
VNK(S)=VNИ(S)-δVNW(S)
δVNW(S)=(k3/S+k4)*ΔDN(S)
ΔDN(S)=ΔDN1(S)-ΔDN2(S)
ΔVN(S)=VNK(S)-VNCK(S)
δVNF(S)=(k1/S+k2)*ΔVN(S)
VNK1(S)=VNK(S)-k0*ΔDN(S)
VNK2(S)=VNCK(S)-δVNF(S)
DN1(S)=(1/S)*VNK1(S)
DN2(S)=(1/S)*VNK2(S)
VNCK(S)=VNC(S)-δVCNFC(S)
VNC(S)=VN(S)+δVNC(S)
δVNFC(S)=(k6/S)*ΔDNC(S)
ΔDNC(S)=DNC1(S)-DNC2(S)

DNC2(S)=DNC(S)+(k7/S)*DNC(S)
VNC2(S)=VNC1(S)-k5*ΔDNC(S)
VNC1(S)=VNC(S)-(k6/S)*ΔDNC(S)
δV
δVNK(S)=VNK(S)-VN(S)
δVNCK(S)=VNCK(S)-VN(S)
DNC(S)=(B(S)-B0)*RN+δDNC(S)
(B(S)-B0)*RN=(1/S)*VN(S)
В системе уравнений (1) дополнительно обозначено:
δVNИ, δVNC, δVNK - ошибка по скорости соответственно ИНС, приемника СНС и интегрированного канала ИСНС по оси N географической системы координат;
δVNCK - ошибка по скорости приемника СНС после коррекции;
δV
VN - составляющая скорости объекта по оси N;
δDNC - ошибка по координате приемника СНС по оси N;
δDNK - ошибка по координате интегрированного канала ИСНС по оси N;
В, В0 - географическая широта местоположения объекта и ее начальное значение;
RN - радиус кривизны меридиального сечения Земли.
Найдем решение системы уравнений (1) относительно следующих переменных: δVNK, δVNW, δV





a0=1
a1=k0+k4+k2k4

a3=k1k3
Проанализируем и определим значения коэффициентов фильтров, исходя из условия устойчивости работы ИСНС.
Если в выражениях (2) - (4) подставить выражение (6), то в знаменателе будем иметь произведение двух характеристических уравнений, поэтому условие устойчивости можно рассматривать отдельно для каждого из них.
Условие устойчивости для первого характеристического уравнения, на основании критерия Гурвица будет

Подставляя значения ai из (7) в (8), получим

Устойчивость может быть обеспечена с большим запасом, так как коэффициенты k0, k2, k4 входят только в положительную часть выражения (9). Исходя из условия устойчивости (9), были проведены расчеты и анализ, на основании которого были выбраны значения коэффициентов, обеспечивающие фильтрацию систематической и низкочастотной (с периодом Шулера) ошибки по скорости ИНС и сглаживание высокочастотных ошибок приемника СНС по скорости и координатам
k0=0.3 1/с, k1=5*10-2 1/с, k2=1, k3=8*10-3 1/с2, k4=8*10-2 1/с.
Условие устойчивости для второго характеристического уравнения при апериодическом переходном процессе будет
(k5+k7)2 ≥ 4k6.
Для времени переходного процесса не более 20 с примем следующие значения коэффициентов второго фильтра коррекции:
k5=0.5 1/с, k6=0.25 1/с2, k7=0.5 1/с.
По окончании переходного процесса для улучшения динамической точности значение коэффициентов можно уменьшить, например:
k5=0.1 1/с, k6=0.01 1/с2, k7=0.1 1/с.
Проанализируем установившееся значение выражений (2) - (6) для систематических (постоянных) составляющих ошибок ИНС (δVNИ) и приемника СНС (δVNC, δDNC).
Для этого используем теорему о конечном значении

С учетом (10) установившееся значение выражений (2) - (6) во временной области соответственно будет





Как показывает выражение (11), установившееся значение ошибки по скорости интегрированного канала равно нулю, а следовательно и ее ошибка по координатам, равная интегралу от установившейся ошибки по скорости, тоже равна нулю.
Установившееся значение выходного сигнала фильтра управления (δVNW) равно ошибке по скорости ИНС (12), установившаяся ошибка оценки (δV
Установившееся значение выходного сигнала второго фильтра коррекции (δVNFС) равно систематической ошибке по скорости приемника СНС (14), поэтому установившаяся ошибка скорректированной скорости приемника СНС (δVNCK) равна нулю (15).
Чтобы исключить влияние систематической ошибки приемника СНС по координате δDNC (выражения (5), (6) вторые члены числителя) на точность определения координат интегрированного канала навигации ИСНС, вводится задержка (блок 15.1 фиг.2) на коррекцию скорости приемника СНС (VNC) во время переходного процесса.
Таким образом, точность интегрированного канала ИСНС не зависит от систематических ошибок ИНС и приемника СНС, а в прототипе от последних ошибок зависимость имеет место.
Вычислим ошибку интегрированного канала ИСНС в определении координат (δBNK) в зависимости от составляющей ошибки по скорости ИНС, изменяющейся с периодом Шулера по закону  В преобразовании Лапласа ошибка ИНС будет иметь вид
В преобразовании Лапласа ошибка ИНС будет иметь вид
Подставляя (16) в (2), с учетом, что установившееся значение δVNCK равно нулю, и переходя от ошибки по скорости к ошибке по координате, получим

где АИ - амплитуда ошибки ИНС по скорости, ν - частота Шулера,
ν=1,23*10-3 1/с.
Установившееся значение ошибки δDNK(t) будет иметь вид

Методическая ошибка ИСНС в определении координат изменяется по гармоническому закону с частотой Шулера.
Найдем численное значение амплитуды ошибки δDNK при АИ=1 м/с, а3=4*10-4 1/с3, k0=0,3 1/с, подставляя эти значения параметров в (18), получим, что амплитуда ошибки по координате составляет 0,9 м.
Таким образом, методическая ошибка ИСНС в определении координат для ИНС среднего класса точности (1,85 км за 1 час) не превышает 1 м независимо от времени работы.
Определим динамические ошибки ИСНС от шумов по скорости и координатам приемника СНС. Для этого сначала определим динамическую ошибку δVNCK по выражению (6), а затем ее значение подставим в выражение (2) и найдем динамические ошибки по скорости δVNK и координатам δDNK ИСНС.
Для расчетов примем, что динамические ошибки (шум) по скорости и координатам приемника СНС изменяются по гармоническому закону
δVNC=AVsiNωt, δDNC=АдsiNωt
или в преобразовании Лапласа

AV, Ад - амплитуды динамических ошибок по скорости и координатам приемника СНС;
ω - частота динамических ошибок.
Подставляя (19) в (6) и решая отдельно для каждого возмущения, найдем динамическую ошибку скорректированной скорости приемника СНС в зависимости от динамических ошибок по скорости и координатам.



где b0=1, b1=k5+k7, b2=k6.
Представим выражение (20) в преобразовании Лапласа по аналогии с (19), при этом сдвиги фаз ϕ1 и ϕ2 можно не учитывать, так как они не влияют на амплитуду динамической ошибки, затем подставим его в (2) и найдем решение для динамической ошибки по скорости интегрированного канала ИСНС

A*V1, A*V2, ϕ*1, ϕ*2 - амплитуды и фазы динамической ошибки по скорости интегрированного канала ИСНС, вызванные соответственно динамическими ошибками по скорости и координатам приемника СНС.


Результаты расчетов амплитуд динамических ошибок по выражениям (21), (22), (24), (25) приведены в таблице.

А*Д1, А*Д2 - амплитуды составляющих динамических ошибок по координатам интегрированного канала ИСНС, полученные путем интегрирования выражения (23). Значения коэффициентов фильтров, принятые при расчетах, приведены выше, а также приняли AV=0,1 м/с, АД=10 м, что соответствует реальным ошибкам приемников СНС в горизонтальном полете самолета.
Как видно из таблицы, в диапазоне частот присущих шумам приемников СНС (ω>1 1/с), динамическая ошибка интегрированного канала ИСНС по координате не превышает 0,3 м, при аналогичной ошибке приемника СНС - 10 м.
Таким образом, аналитическими расчетами доказано, что устраняется влияние на точность интегрированного канала ИСНС ошибок ИНС (с уровня 2 км за 1 час до 1 м независимо от времени), систематических ошибок по скорости и координатам СНС и его динамических ошибок (с уровня 10 м до 0,3 в области частот ω>1 1/с).
Для подтверждения полученного технического результата в динамических режимах и численной оценки характеристик было проведено математическое моделирование работы ИСНС в условиях полета самолета и лабораторный эксперимент на макете ИСНС.
При моделировании была принята известная математическая модель ИНС с периодом Шулера, на вход которой поступали соответствующие идеальные параметры движения самолета в осях ИНС. Текущие скорости с горизонтальных каналов математической модели ИНС в географической системе координат (VNИ, VEИ) поступали на соответствующий вход фильтров, на другие входы которых поступали скорости (VNC, VEC) и координаты (DNC, DEC) приемника СНС, сформированные в математической модели путем добавления к их идеальным значениям ошибок, в виде случайных колебаний и систематической составляющей. Таким образом, обеспечивалась работа интегрированного канала ИСНС в условиях моделируемого полета.
Уравнения фильтров по одному из горизонтальных каналов представлены выражением (1), аналогичные уравнения были использованы для другого горизонтального канала. Моделирование проводилось при следующих условиях, ИСНС начинала работать с момента взлета самолета, который в течении 200 с набирал высоту и скорость и далее летел с постоянной скоростью 200 м/с, время полета составляло 6000 с. Начальное значение географической широты и долготы было принято равным ϕ0=46°, λ0=29°, начальное значение угла ИНС относительно севера было равно нулю.
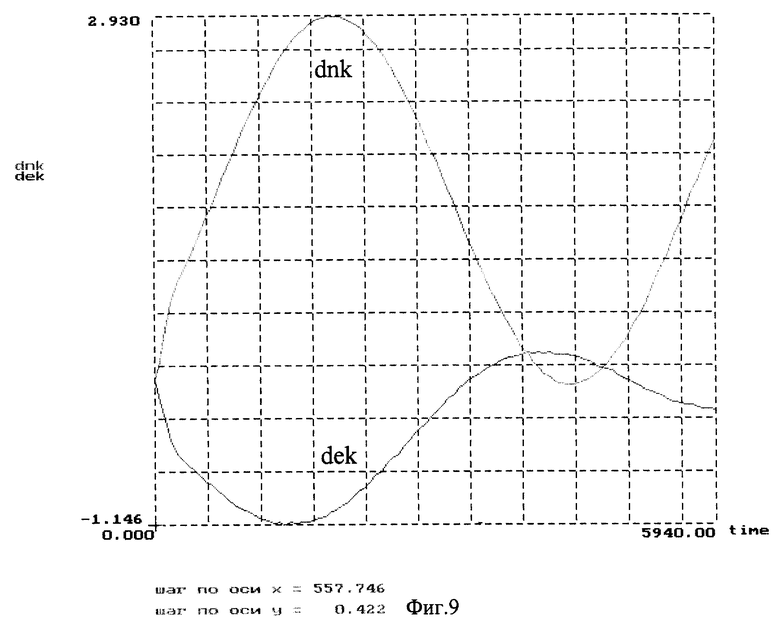
Результаты моделирования приведены на фиг. 3-9, на которых ранее принятым обозначениям присвоены новые в кодах программы ЭВМ:
time - время работы ИСНС, с;
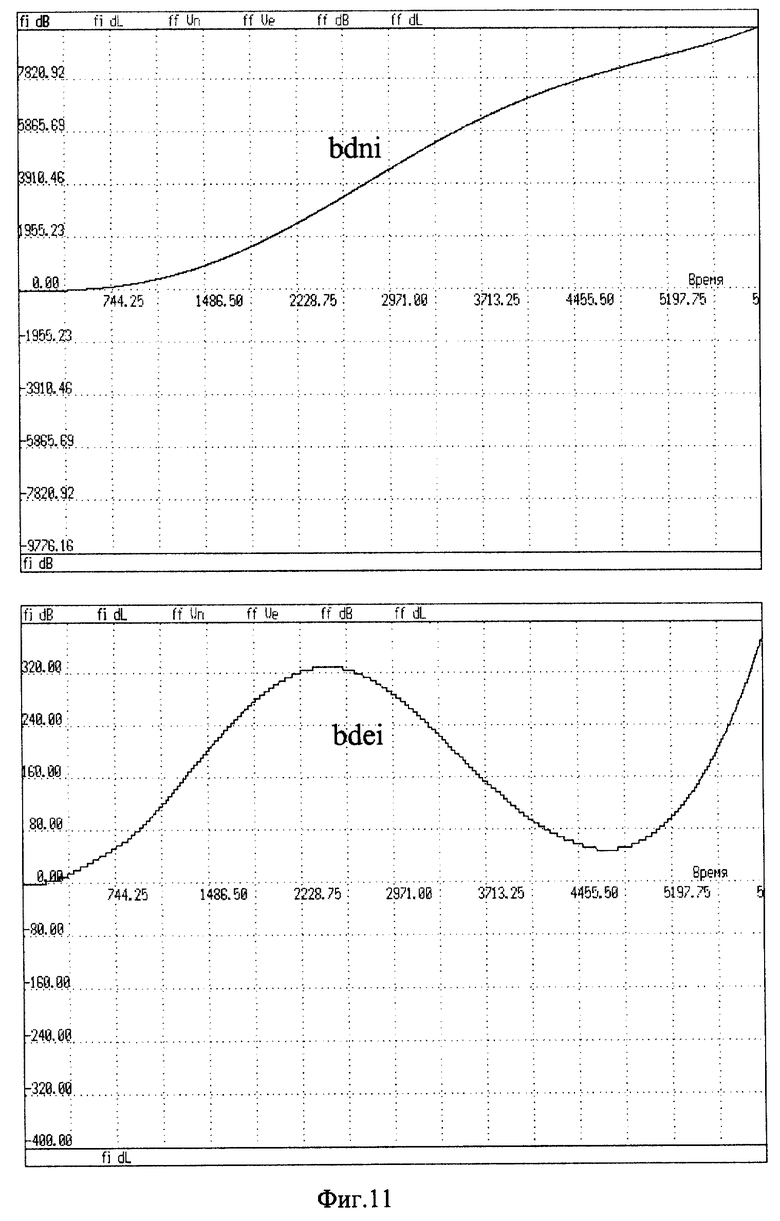
bdei, bdni - ошибки ИНС в определении географических координат местоположения самолета, м;
ode, odn - ошибки интегрированного канала ИСНС в определении географических координат местоположения самолета, м;
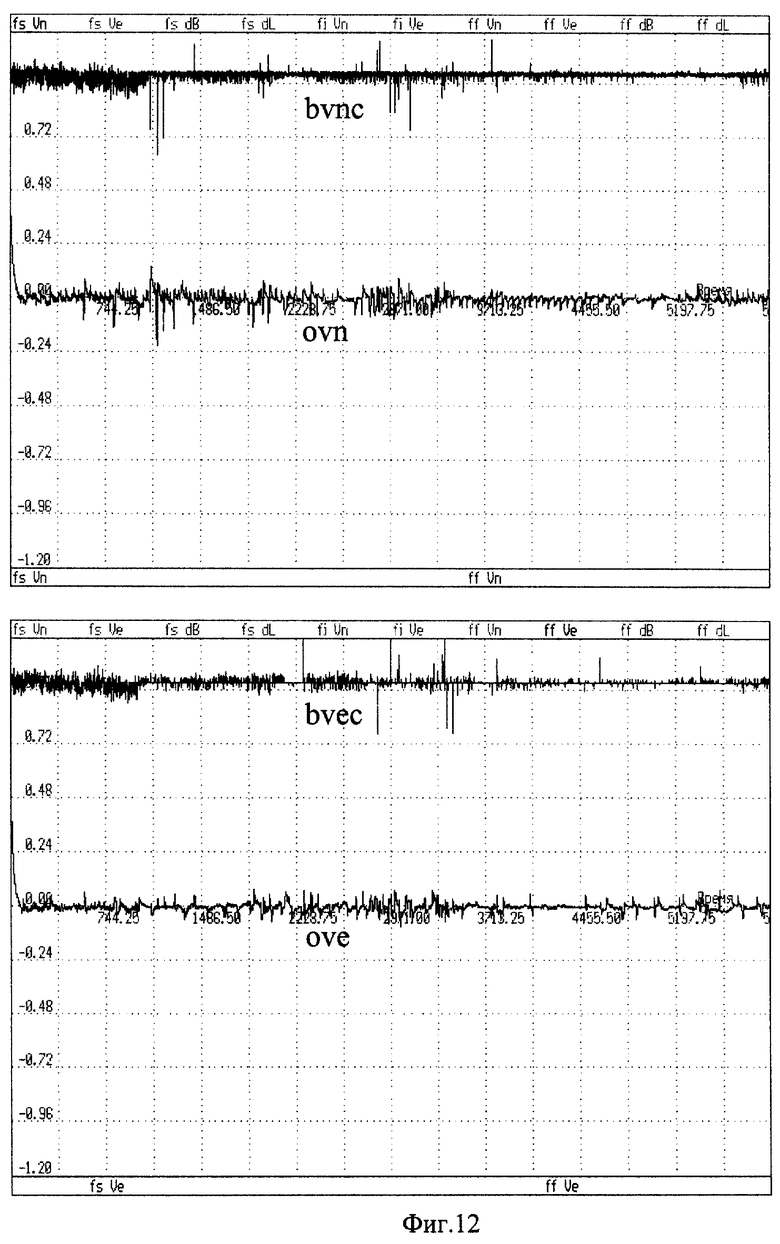
ove, ovn - ошибки интегрированного канала ИСНС в определении скорости по горизонтальным осям географической системы координат, м/с;
bdec, bdnc - ошибки приемника СНС в определении географических координат местоположения самолета, м;
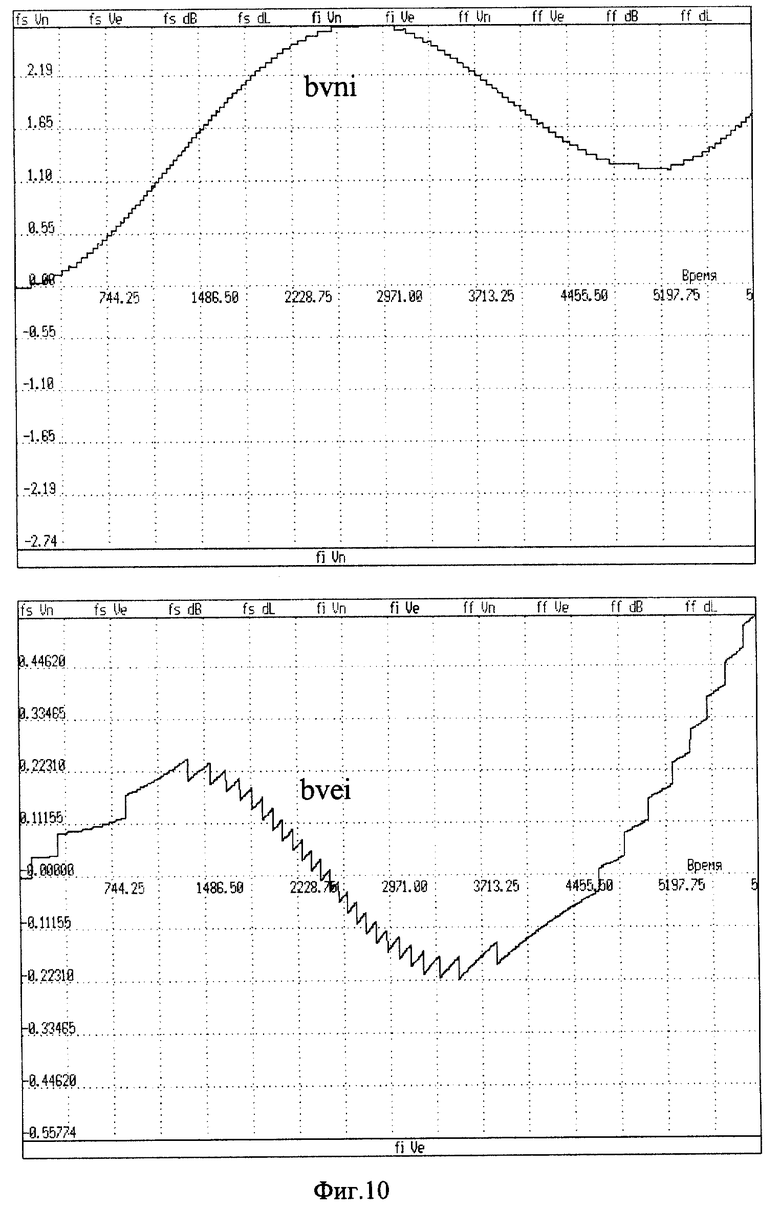
bvec, bvnc - ошибки приемника СНС в определении скорости по горизонтальным осям географической системы координат, м/с;
dEK, dnc - ошибки по скорости ИНС, выделенные фильтром ИСНС, м/с;
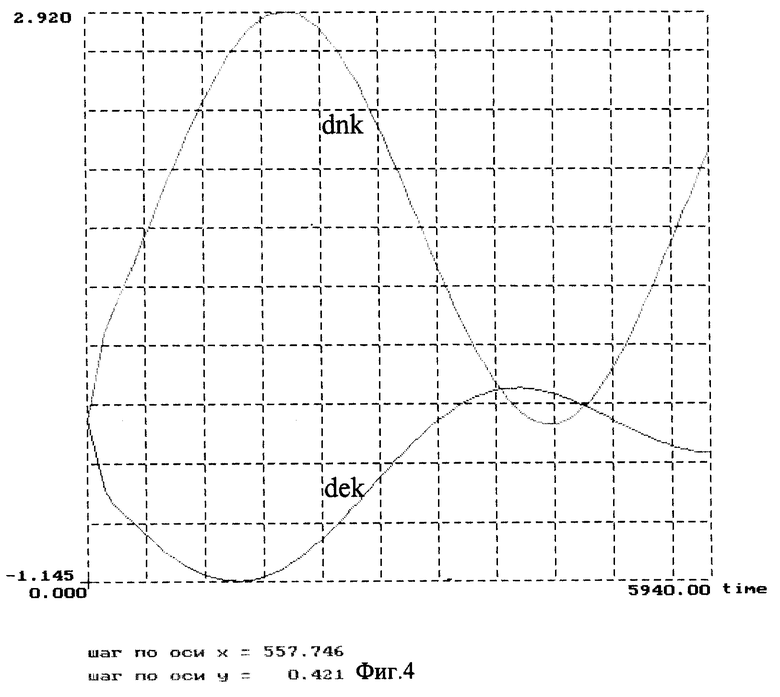
х - масштаб одной клетки по горизонтальной оси по времени (х=557,7 с);
у - масштаб одной клетки по вертикальной оси.
На фиг.3, 4 показаны ошибки ИНС в определении географических координат местоположения и скорости по горизонтальным каналам. За время моделируемого полета 6000 с ошибки ИНС по широте (bdni) не превышали 8,26 км, а по долготе (bdei) - 2,49 км, соответственно ошибки по скорости не превышали 2,92 м/с (bvni) и - 1,15 м/с (bvei).
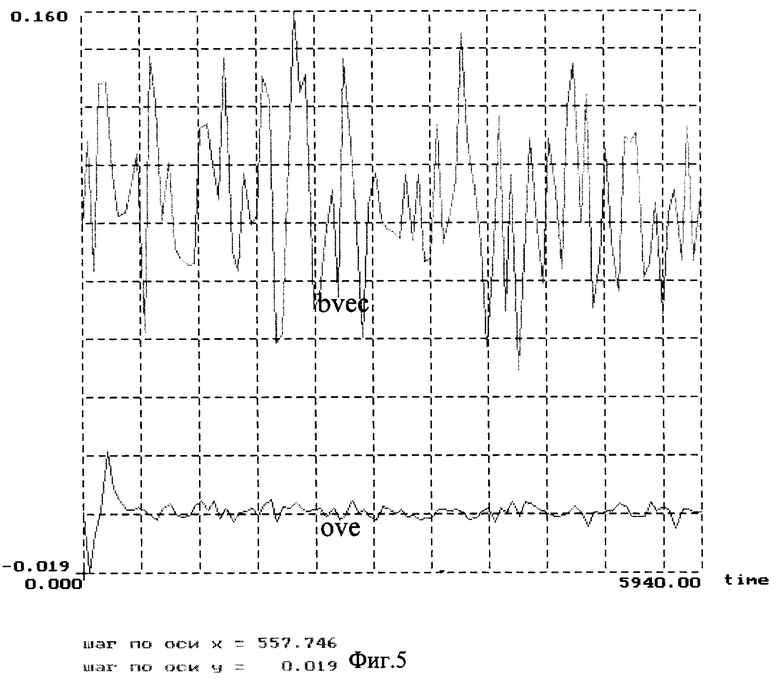
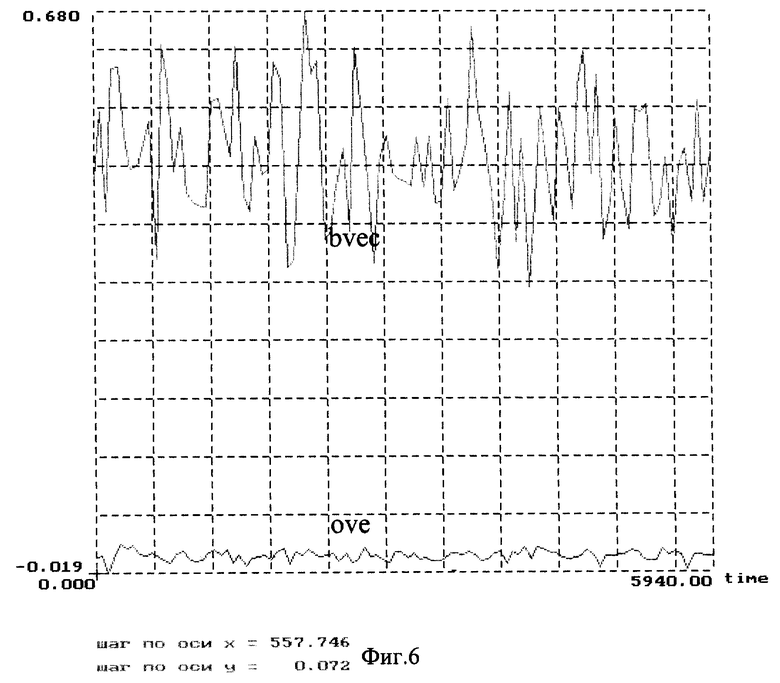
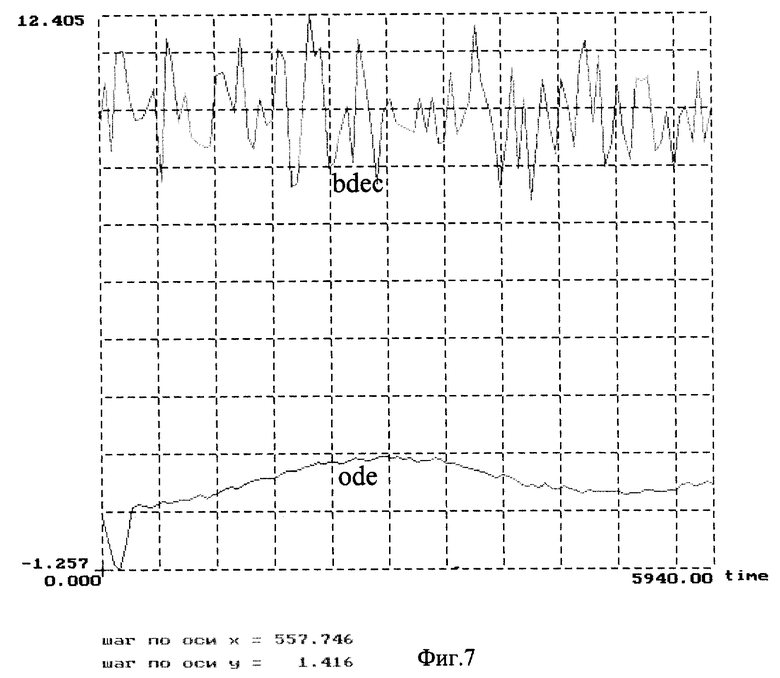
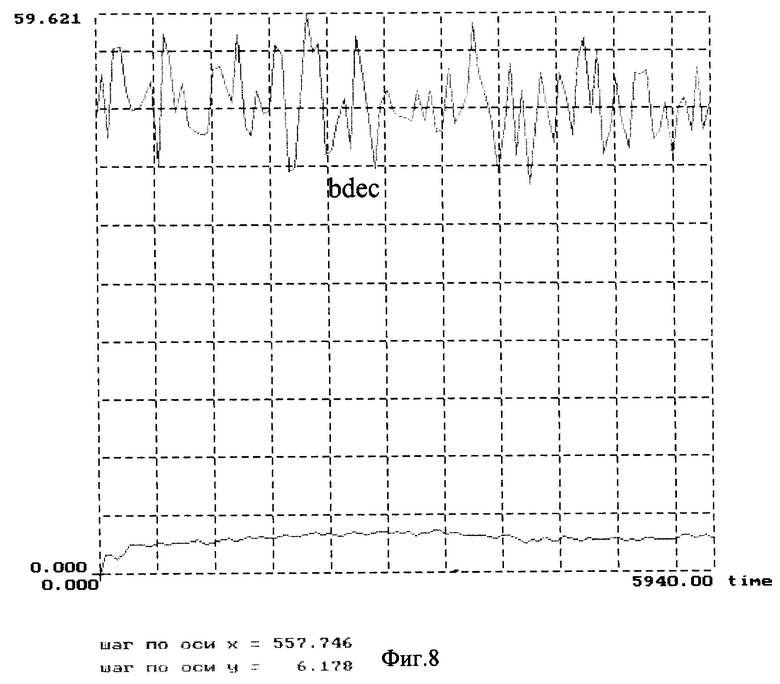
На фиг.5-8 показаны ошибки приемника СНС и интегрированной ИСНС в определении скорости и географических координат местоположения по одному из двух идентичных горизонтальных каналов, аналогичный вид они имеют по другому каналу.
Ошибки приемника СНС по скорости и координатам задавались в виде систематической составляющей и случайного шума. Были выполнены две реализации для различных значений систематических ошибок по скорости, равных 0,1 и 0,5 м/с, в первой реализации суммарные ошибки по скорости приемника СНС (bvec) не превышали 0,16 м/с (фиг.5), а во второй 0,68 м/с (фиг.6). Аналогично были выполнены две реализации для различных значений систематических ошибок по координате, равных 10 и 50 м, в первой реализации суммарные ошибки по координате приемника СНС (bdec) не превышали 12,4 м (фиг.7), а во второй 59,6 м (фиг.8).
Ошибки ИНС для сравнения во всех реализациях имели одно и то же значение (фиг.3, 4).
При указанных ошибках ИНС и приемника СНС ошибки интегрированного канала ИСНС составили:
- по скорости (ove) систематическая ошибка равна нулю независимо от систематических ошибок ИНС и приемника СНС, случайные колебания ошибок не превышают 0,02 м/с (фиг.5, 6);
- по координате (ode) систематическая ошибка в первой реализации равна 0,6 м (фиг.7), во второй 4 м (фиг.8), случайные колебания не превышали 0,3 м.
На фиг.9 показаны ошибки по скорости ИНС, выделенные фильтром ИСНС (dnk, dek). Ошибки по скорости приемника СНС для данной реализации приведены на фиг.6. Сравнивая собственные ошибки ИНС (фиг.4) и выделенные фильтром (фиг.9), увидим, что погрешность выделения ошибок по скорости ИНС составляет 0,01 м/с, время выделения не превышает 20 с.
Моделирование показало, что интегрированный канал ИСНС устраняет влияние на свою точность ошибок ИНС и систематических ошибок по скорости и координатам приемника СНС, снижает уровень шумов и с высокой точностью и быстродействием выделяет текущие ошибки по скорости ИНС. Остаточная систематическая ошибка интегрированного канала ИСНС по координатам обусловлена динамикой переходного процесса и зависит от величины систематической ошибки приемника СНС, примерно в 20 раз меньше ее.
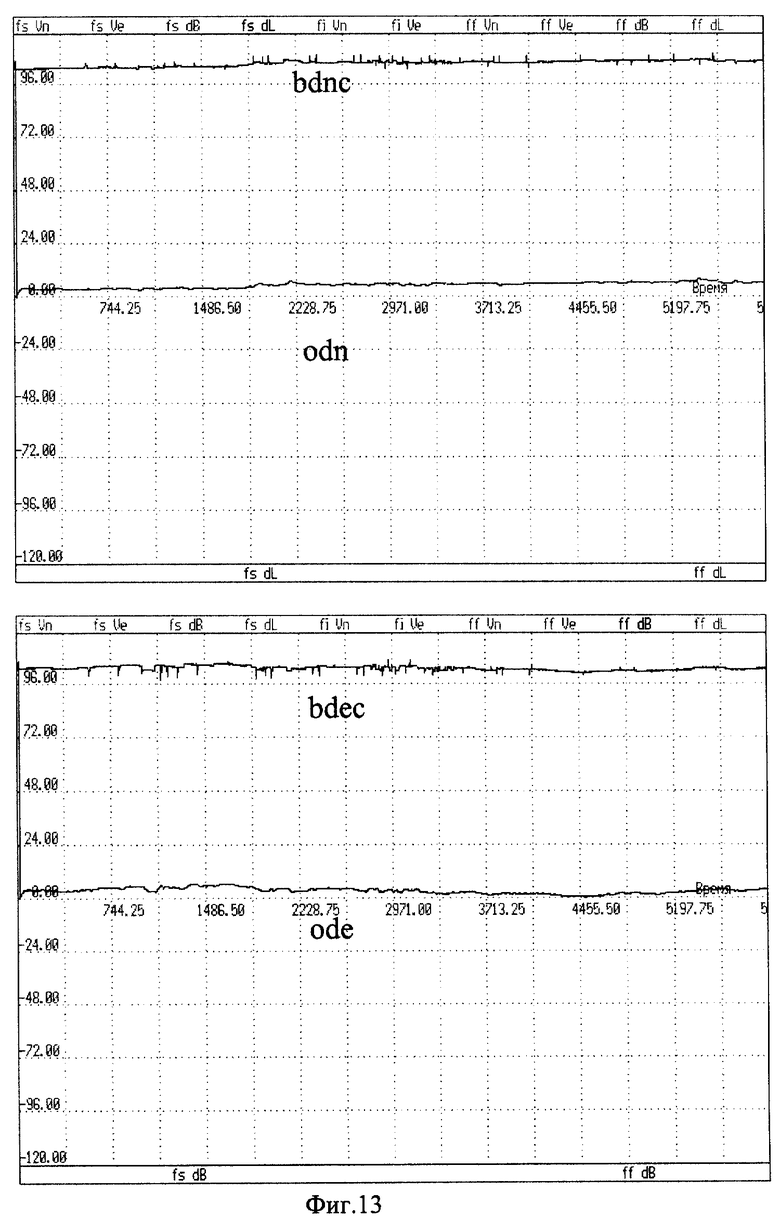
На фиг.10-13 представлены результаты лабораторного эксперимента на макете ИСНС.
Макет был создан на базе отечественной ИНС И-21, приемника GPS/ГЛОНАСС GG-24 фирмы ASHTECH и вычислителя, в котором были реализованы фильтры и алгоритмы навигации интегрированного канала.
Эксперимент проводился по аналогии с математическим моделированием. Поступательное движение самолета имитировалось путем добавления к соответствующим выходным сигналам системы И-21 и приемника GG-24 сигналов из модели движения самолета, которые поступали на соответствующие входы интегрированного канала ИСНС, обеспечивая его работу в условиях полета самолета.
На фиг.10, 11 приведены ошибки ИНС И-21 соответственно по скорости и координатам, ошибки по скорости не превышали 2,74 м/с (bvni) и 0,56 м/с (bvei), а ошибки по координатам не превышали 9,7 км (bdni) и 0,4 км (bdei) на интервале времени 6000 с.
На фиг.12, 13 приведены ошибки приемника СНС и интегрированного канала ИСНС соответственно по скорости и координатам.
Для проверки заявленных возможностей ИСНС к выходным сигналам по скорости и координатам приемника СНС GG-24 из модели добавлялись систематические ошибки как и при математическом моделировании, соответственно 0,5 м/с (bvnc, bvec) и 50 м (bdnc, bdec).
При указанных ошибках ИНС И-21 (фиг.10, 11) и приемника СНС GG-24 (фиг.12, 13) ошибки интегрированного канала ИСНС составили по скорости 0,03 м/с (ovn, ove), по координате не превышали 4 м (odn) и 5 м (ode).
Таким образом, результаты эксперимента практически совпадают с результатами аналитических расчетов и математического моделирования и подтверждают технический результат и цель предложения.
Основная цель предложения, в отличие от прототипа, устранение влияния систематических ошибок и шумов приемников СНС на точность интегрированного канала ИСНС достигнута, что позволяет использовать относительно грубые и дешевые бесплатформенные ИНС и приемники СНС в ее составе, сохраняя при этом высокую точность, соизмеримую с работой СНС в дифференциальном режиме, при низкой себестоимости. Эти качества ИСНС расширяют область ее применения в нетрадиционных коммерческих сферах.
Интегрированная ИСНС может быть использована на летательных аппаратах, морских судах и наземных средствах передвижения для точного определения навигационных параметров и рекомендована для внедрения организациям и фирмам, занимающимися созданием, испытаниями и эксплуатацией ИСНС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |

Изобретение относится к области инерциально-спутниковых навигационных систем (ИСНС) и может быть использовано при создании интегрированных ИСНС для самолетов и других подвижных объектов. Сущность изобретения состоит в том, что осуществляется коррекция составляющих скорости приемника спутниковой навигационной системы (СНС) с использованием его координат и в контур интегрированного канала навигации ИСНС вместо скоростей с приемника СНС, поступают его скорректированные скорости с заданной задержкой корректирующего сигнала, формируемого вторым фильтром коррекции, в результате чего исключается влияние не только шумов, но и систематических ошибок по скорости и координатам приемника СНС на точность интегрированного канала навигации ИСНС. Технический результат изобретения - достижение точности интегрированной ИСНС выше, чем у комплексируемых в ее составе инерциальной навигационной системы (ИНС) и приемника СНС, повышение точности выделения текущей ошибки по скорости ИНС, снижение себестоимости ИСНС за счет использования сравнительно недорогих, грубых ИНС и приемников СНС, которые наряду с шумами могут иметь систематические ошибки, расширение области применения для объектов различного типа. 1 табл., 13 ил.
Инерциально-спутниковая навигационная система, содержащая инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления навигационных параметров, два горизонтальных канала, кроме того, в каждом горизонтальном канале первый - пятый сумматоры, первый фильтр коррекции, первый интегратор с обратной связью, второй интегратор без обратной связи, фильтр управления, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления навигационных параметров и с первыми входами первых сумматоров, а выходы первых сумматоров соединены со входами фильтров коррекции, выходы которых соединены с первыми входами пятых сумматоров, выходы которых соединены со входами вторых интеграторов без обратной связи, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами первых интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами первых интеграторов с обратной связью и входами фильтров управления, вторые выходы первых интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами первых интеграторов с обратной связью, отличающаяся тем, что в каждый горизонтальный канал инерциально-спутниковой навигационной системы дополнительно включены шестой сумматор, второй фильтр коррекции и блок задержки, причем выходы шестых сумматоров соединены со вторыми входами первых и пятых сумматоров, а первые выходы по скорости приемника спутниковой навигационной системы соединены с первыми входами вторых фильтров коррекции и с первыми входами шестых сумматоров, вторые входы которых соединены с выходами блоков задержки, входы которых соединены с выходами вторых фильтров коррекции, вторые входы которых соединены со вторыми выходами по координатам приемника спутниковой навигационной системы.
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |

