Изобретение относится к области инерциальных навигационных систем (ИНС), а более конкретно к автономной самоинтеграции их собственных навигационных параметров, и может быть использовано для самокоррекции ошибок ИНС в начальный период работы и в процессе всего времени работы в составе инерциально-спутниковой навигационной системы (ИСНС), на интервалах неработоспособности приемника спутниковой навигационной системы (СНС), без привлечения внешней навигационной информации, а также для создания ИНС платформенного и бесплатформенного типа с режимом самокоррекции и ИСНС на их основе.
Известны способы интеграции (комплексирования) навигационной информации ИНС и базовой системы, а также интегрированные (комбинированные) навигационные системы. Например, "Способ комплексирования инерциальных навигационных систем и комбинированная навигационная система", патент РФ N 2082098 с приоритетом от 23.09.93 г.
Известный способ физического комплексирования и комбинированная навигационная система имеют следующие недостатки:
- для комплексирования и коррекции ошибок ИНС используется внешняя навигационная информация с приемника СНС;
- не обеспечивается непрерывность интеграции и коррекции ошибок ИНС, так как при наличии помех или затенении антенны приемник СНС может терять работоспособность.
Известен также способ математической интеграции навигационной информации на основе фильтра Калмана и интегрированные системы, созданные на его базе. Например, описанные в книге: "Интегрированные системы ориентации и навигации для морских подвижных объектов". // Под общ. ред. академика РАН В.Г.Пешехонова. - Спб.: ЦНИИ "Электроприбор", 1999, - 357 с. Кроме этого известны зарубежные интегрированные ИСНС LN-100G и H764G (США), ЭЙ "Авиационные системы и приборы" №1, 1994 г., №4, 1991 г. Этот способ и интегрированные системы, созданные на его базе имеют следующие недостатки:
- для интеграции навигационной информации и оценки ошибок ИНС фильтром Калмана используется внешняя навигационная информация от приемника СНС;
- требуется априорная информация о математической модели ошибок ИНС и существенное время для их оценки, не менее 5 минут;
- фильтр Калмана по известным причинам может терять устойчивость;
- не обеспечивается непрерывность работы интегрированной системы из-за возможной потери работоспособности приемника СНС.
Все известные способы интеграции используют навигационную информацию базовой системы, в данном случае приемника СНС. Аналогов способа самоинтеграции навигационной информации ИНС не обнаружено.
Известна также ИСНС, построенная на базе способа физической интеграции навигационной информации ИНС и приемника СНС, патент РФ №2148796 с приоритетом от 05.11.98 г., которая по своей технической сущности и достигаемым результатам может быть выбрана в качестве прототипа для самоинтегрированной ИНС.
Известный способ физической интеграции навигационной информации, включающий построение дополнительного интегрированного канала навигации, содержащего фильтр физической интеграции (ФФИ) в каждом горизонтальном канале и блок вычисления интегрированных навигационных параметров, интеграцию одноименных скоростей горизонтальных каналов ИНС и приемника СНС, для чего направляют сигналы по скоростям ИНС на первый вход ФФИ, а сигналы по скоростям приемника СНС на второй и третий входы ФФИ, в них одновременно фильтруют ошибки ИНС и приемника СНС и формируют интегрированные скорости, затем на их основе вычисляют интегрированные координаты местоположения объекта.
Инерциально-спутниковая навигационная система для реализации известного способа содержит инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления интегрированных навигационных параметров, фильтр физической интеграции в каждом горизонтальном канале, который включает первый, второй, третий, четвертый и пятый сумматоры, фильтр коррекции, первый интегратор с обратной связью, второй интегратор без обратной связи, фильтр управления, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления интегрированных навигационных параметров и с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов, приемника спутниковой навигационной системы, а выходы первых сумматоров соединены со входами фильтров коррекции, выходы которых соединены с первыми входами пятых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов, приемника спутниковой навигационной системы, а выходы пятых сумматоров соединены со входами вторых интеграторов без обратной связи, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами первых интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами первых интеграторов с обратной связью и входами фильтров управления, вторые выходы первых интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами первых интеграторов с обратной связью.
Известные способ и устройство имеют следующие недостатки:
- для интеграции и коррекции ошибок ИНС используется внешняя навигационная информация приемника СНС;
- не обеспечивается непрерывность определения интегрированных навигационных параметров на интервалах неработоспособности приемника СНС.
Сущность изобретения для способа состоит в том, что в известном способе интеграции навигационной информации, включающем построение дополнительного интегрированного канала навигации, содержащего фильтр физической интеграции в каждом горизонтальном канале и блок вычисления интегрированных навигационных параметров, интеграцию одноименных скоростей горизонтальных каналов инерциальной навигационной системы и приемника спутниковой навигационной системы, для чего направляют сигналы по скоростям инерциальной навигационной системы на первый вход фильтров физической интеграции, а сигналы по скоростям приемника спутниковой навигационной системы на второй и третий входы фильтров физической интеграции, в них одновременно фильтруют ошибки инерциальной навигационной системы и приемника спутниковой навигационной системы и формируют интегрированные скорости, затем на их основе вычисляют интегрированные координаты местоположения объекта, вместо интеграции одноименных скоростей горизонтальных каналов инерциальной навигационной системы и приемника спутниковой навигационной системы выполняют самоинтеграцию автономных и скорректированных скоростей инерциальной навигационной системы, при этом вместо внешней коррекции ошибок инерциальной навигационной системы от приемника спутниковой навигационной системы осуществляют самокоррекцию ее ошибок, для чего дополнительно формируют скорректированные скорости путем коррекции автономных скоростей с помощью сигналов на коррекцию ошибок, сформированных фильтрами физической интеграции, затем направляют скорректированные скорости на второй и третий входы фильтров физической интеграции вместо скоростей приемника спутниковой навигационной системы, при этом при реализации способа в автономной инерциальной навигационной системе скорректированные скорости направляют с задержкой по отношению к автономным скоростям, перед началом движения объекта фильтры физической интеграции одновременно фильтруют ошибки инерциальной навигационной системы и формируют интегрированные скорости, затем на их основе вычисляют интегрированные координаты местоположения объекта, при этом автономный инерциальный и интегрированный канал навигации начинают счисление координат одновременно с переводом инерциальной навигационной системы в рабочий режим, а при реализации способа в инерциальной - навигационной системе, работающей в составе инерциально-спутниковой навигационной системы, скорректированные скорости формируют по сигналу приемника спутниковой навигационной системы в начальные моменты интервалов его неработоспособности и направляют без задержки в процессе движения объекта на второй и третий входы фильтров физической интеграции, которые осуществляют самокоррекцию ошибок инерциальной навигационной системы, затем при появлении сигнала работоспособности приемника спутниковой навигационной системы его скорости вновь направляют на второй и третий входы фильтров физической интеграции вместо скорректированных скоростей инерциальной навигационной системы, затем этот процесс повторяют на каждом интервале неработоспособности приемника спутниковой навигационной системы.
Сущность изобретения для устройства состоит в том, что из иинерциально-спутниковой навигационной системы, содержащей инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления интегрированных навигационных параметров, фильтр физической интеграции в каждом горизонтальном канале, который включает первый, второй, третий, четвертый и пятый сумматоры, фильтр коррекции, первый интегратор с обратной связью, второй интегратор без обратной связи, фильтр управления, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления интегрированных навигационных параметров и с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы первых сумматоров соединены со входами фильтров коррекции, выходы которых соединены с первыми входами пятых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов, приемника спутниковой навигационной системы, а выходы пятых сумматоров соединены со входами вторых интеграторов без обратной связи, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами первых интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами первых интеграторов с обратной связью и входами фильтров управления, вторые выходы первых интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами первых интеграторов с обратной связью, исключен приемник спутниковой навигационной системы, в результате этого она становится самоинтегрированной инерциальной навигационной системой, в каждый горизонтальный канал которой дополнительно включены блок коммутации и задержки сигналов и шестой сумматор, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы, кроме того, соединены со вторыми входами блока коммутации и задержки сигналов, первые входы которого с соединены с выходами фильтров управления, а его первый и второй выходы соединены соответственно с первыми и вторыми входами шестых сумматоров, выходы которых соединены со вторыми входами первых и пятых сумматоров.
Технический результат изобретения - повышение точности и сокращение времени готовности ИНС без использования внешней информации и априорных данных по модели ее ошибок путем самоинтеграции собственной навигационной информации ИНС в ФФИ с целью непрерывной самокоррекции ее ошибок на начальном участке работы до 20 минут, а также обеспечение непрерывной выдачи интегрированной навигационной информации и повышение точности ИНС при ее работе в составе ИСНС на интервалах неработоспособности (до 10 минут) приемника СНС, снижение себестоимости при использовании недорогих грубых ИНС, с относительно высокой точностью выдачи навигационной информации за счет самокоррекции, на объектах с небольшим временем работы, расширение области применения самоинтегрированных ИНС для объектов, стартующих с неподвижного и подвижного основания, а также их использование в составе ИСНС на объектах различного типа.
Указанный технический результат достигается тем, что в ИНС дополнительно реализуется унифицированный интегрированный канал навигации, содержащий ФФИ, блок вычисления интегрированных навигационных параметров, блок коммутации и задержки сигналов и сумматор, интегрированный канал навигации может работать либо в режиме самокоррекции, либо в инерциально-спутниковом режиме при использовании информации от приемника СНС, в результате чего точность интегрированного канала навигации ИНС выше автономного.
Сущность изобретения поясняется чертежами (фиг.1÷8) и таблицами 1÷5.
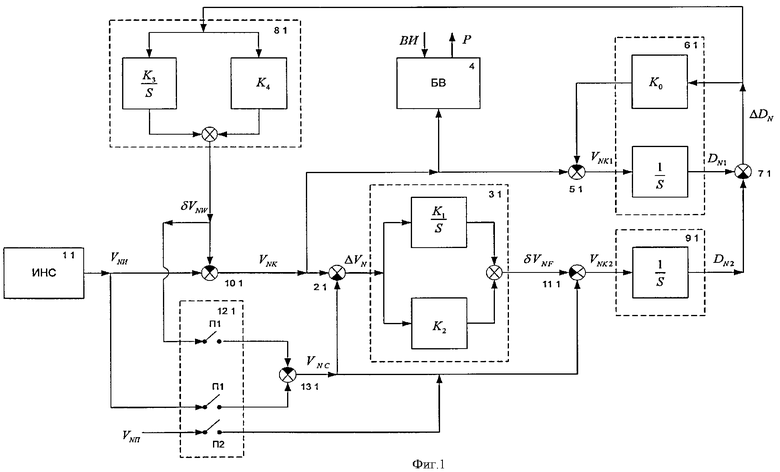
На фиг.1 показан пример реализации способа и приведена функциональная схема одного из двух идентичных горизонтальных каналов ИНС при ее использовании на различных объектах.
На фиг.2 схематично показаны состав самоинтегрированной ИНС и связи между блоками.
На фиг.3÷8 и в таблицах 1÷5 приведены ошибки, полученные при моделировании и эксперименте на лабораторных образцах самоинтегрированных ИНС.
На фиг.1 приняты следующие обозначения:
VNИ, VNC, NNK, VNП - линейные скорости ИНС, соответственно автономные, скорректированные, интегрированные и приемника СНС по оси N географической системы координат;
δVNW - сигнал на коррекцию ошибок автономной скорости ИНС;
БВ - блок вычисления интегрированных навигационных параметров;
БКЗ - блок коммутации и задержки сигналов;
П1, П2 - релейные переключатели;
k0, k1, k2 k3, k4 - коэффициенты фильтра физической интеграции;
Р - выходные параметры интегрированного канала навигации (интегрированные скорости и географические координаты);
ВИ - входная информация, необходимая для работы ИНС;
1/S - символ интегрирования;
S - оператор Лапласа.
Сущность работы способа поясним с помощью фиг.1 для трех вариантов использования самоинтегрированной ИНС на объектах.
1) Самоинтегрированная ИНС используется на объекте, стартующем с неподвижного основания.
При подготовке ИНС (платформенного или бесплатформенного типа) к работе на неподвижном основании одновременно с переводом ее в рабочий режим начинает работать ФФИ в подготовительном режиме в течение времени от одной до трех минут (конкретное время определяется классом точности автономного канала навигации ИНС), при этом переключатели П1 и П2 находятся в разомкнутом положении, а автономная скорость ИНС (VNИ) поступает на первый вход ФФИ. По истечении указанного времени ФФИ переводится в рабочий режим и объект может начинать движение, при этом переключатели П1 переводятся в замкнутое положение и на второй и третий входы ФФИ поступает из БКЗ скорректированная скорость ИНС (VNC), полученная путем суммирования (коррекции) автономной скорости (VNИ) и сигнала на коррекцию ошибок (δVNW), сформированного ФФИ. С этого момента ФФИ начинает работать в режиме самоинтеграции не более 20 минут, при этом интегрированный канал навигации (БВ) начинает выдавать интегрированные навигационные параметры одновременно с автономным каналом с момента его перевода в рабочий режим.
2) Самоинтегрированная ИНС используется на объекте, стартующем с подвижного основания.
При подготовке ИНС к работе на объекте, стартующем с подвижного основания и на нем нет приемника СНС, одновременно с переводом ИНС в рабочий режим ФФИ начинает работать в инерциально-спутниковом режиме на интервале времени от одной до трех минут. При этом переключатели П1 разомкнуты, а переключатель П2 замкнут и на первый вход ФФИ поступает автономная скорость ИНС (VNИ), а на второй и третий его входы поступает скорость от приемника СНС (VNП), установленного на подвижном основании. По истечении указанного времени ФФИ переводится в режим самоинтеграции и объект может стартовать с подвижного основания, при этом переключатели П1 замыкаются, а переключатель П2 размыкается и ИНС работает в режиме самокоррекции не более 10 минут.
3) Самоинтегрированная ИНС используется в составе ИСНС на объектах, имеющих на своем борту приемник СНС и стартующих с подвижного или неподвижного основания.
Одновременно с переводом ИНС в рабочий режим интегрированный канал навигации без подготовительного режима начинает работать в инерциально-спутниковом режиме. При этом переключатели П1 разомкнуты, а переключатель П2 замкнут и на первый вход ФФИ поступает автономная скорость ИНС (VNИ), а на его второй и третий входы поступает скорость приемника СНС (VNП); а с выхода ФФИ поступает интегрированная скорость (VNK) в БВ. При потере работоспособности приемника СНС, в любой момент времени, по его сигналу переключатель П2 размыкается, а переключатели П1 замыкаются и интегрированный канал навигации переходит в режим самокоррекции продолжительностью не более 10 минут. При возобновлении работоспособности приемника СНС по его сигналу переключатель П2 замыкается, а переключатели П1 размыкаются и интегрированный канал навигации вновь переходит в инерциально-спутниковый режим работы. Этот процесс повторяется при каждом интервале неработоспособности приемника СНС.
Работу самоинтегрированной ИНС поясним с помощью фиг.1, на которой обозначены блоки, входящие в ее состав:
1.1, 1.2 - автономные горизонтальные каналы ИНС;
2.1, 2.2 - первые сумматоры;
3.1, 3.2 - фильтры коррекции;
4 - блок вычисления интегрированных навигационных параметров;
5.1, 5.2 - вторые сумматоры;
6.1, 6.2 - первые интеграторы с обратной связью;
7.1, 7.2 - третьи сумматоры;
8.1, 8.2 - фильтры управления;
9.1, 9.2 - вторые интеграторы без обратной связи;
10.1, 10.2 - четвертые сумматоры;
11.1, 11.2- пятые сумматоры;
12 - блок коммутации и задержки сигналов;
13.1, 13.2 - шестые сумматоры.
Блок коммутации и задержки сигналов (12) представляет собой релейный переключатель, который переключает режимы работы ФФИ и задерживает по времени поступление сигналов на ФФИ по специальным признакам.
Работу самоинтегрированной ИНС опишем для основного режима, то есть при подготовке ее на неподвижном основании, так как работа ФФИ и БВ во всех режимах одинакова.
Самоинтегрированная ИНС работает следующим образом (фиг.1, 2).
В момент перевода ИНС из режима подготовки в рабочий режим ФФИ начинает работать в подготовительном режиме на неподвижном объекте, при этом переключатели П1 и П2 в БКЗ 12.1, 12.2 разомкнуты (фиг.1), а БВ 4 в это время счисляет координаты местоположения. Автономные скорости с горизонтальных каналов ИНС 1.1, 1.2 направляют через первые входы ФФИ в сумматоры 10.1, 10.2, где к ним добавляют сигналы на коррекцию ошибок с фильтров управления 8.1, 8.2, эти сигналы формируют путем направления интегрированных скоростей по двум параллельным ветвям, в первой ветви интегрированные скорости направляют через сумматоры 2.1, 2.2, фильтры коррекции 3.1, 3.2, сумматоры 11.1, 11.2 и вторые интеграторы без обратной связи 9.1, 9.2 на сумматоры 7.1, 7.2 во второй ветви интегрированные скорости направляют через сумматоры 5.1, 5.2 и первые интеграторы с обратной связью 6.1, 6.2, на сумматоры 7.1, 7.2, разность сигналов с выхода сумматоров 7.1, 7.2, направляют на вход фильтров управления 8.1, 8.2. По истечении времени подготовительного режима ФФИ переключатели П1 БКЗ 12.1, 12.2 замыкаются и ФФИ переходит в режим самокоррекции, при этом объект может начинать движение. Работа самоинтегрированной ИНС в этом режиме отличается тем, что на входы сумматоров 2.1, 2.2 и 11.1, 11.2 поступают скорректированные скорости, сформированные путем направления через замкнутые переключатели П1 БКЗ 12.1, 12.2 (фиг.1) по своим входам автономных скоростей с горизонтальных каналов ИНС 12.1, 12.2 и сигналов на коррекцию ошибок с выхода фильтров управления 8.1, 8.2 на соответствующие входы сумматоров 13.1, 13.2.
Технический результат достигается следующим образом.
В соответствии с фиг.1 работу интегрированного канала ИНС по одному из двух идентичных горизонтальных каналов можно описать следующей системой уравнений в преобразовании Лапласа (в операторной форме).
VNИ(S)=VN(S)+δVNИ(S)
VNK(S)=VNИ(S)-δVNW(S)
δVNW(S)=(k3/S+k4)*ΔDN(S)
ΔDN(S)=DN1(S)-DN2(S)
ΔVN(S)=VNK(S)-VNC(S)

VNK1(S)=VNK(S)-k0*ΔDN(S)
VNK2(S)=VNC(S)-δVNF(S)
DN1(S)=(1/S)*VNK1(S)
DN2(S)=(1/S)*VNK2(S)
VNC(S)=0,0<t<t1
VNC(S)=VNИ(S)-δVNW(S), t>t1
δVNИ(S)=VNИ(S)-VN(S)
δVNK(S)=VNK(S)-VN(S)
δDNИ(S)=(1/S)δVNИ(S)
δDNK(S)=(1/S)δVNK(S)
В системе уравнений (1) дополнительно обозначено:
δVNИ, δVNK - ошибки по скорости соответственно автономного и интегрированного канала навигации ИНС по оси N географической системы координат;
VN - составляющая скорости объекта по оси N;
δDNИ, δDNK - ошибка по координате соответственно автономного и интегрированного канала ИНС по оси N.
Решение системы уравнений (1) будем производить в два этапа, сначала в подготовительном режиме работы интегрированного канала навигации (VN и VNC равны нулю) на интервале времени от нуля до t1, затем, используя конечные результаты решения в подготовительном режиме в момент времени t1 в качестве начальных условий для рабочего режима, найдем решение на интервале времени от t1 до t, когда VN и VNC не равны нулю.
Решение системы уравнений (1) в преобразовании Лапласа для первого этапа относительно переменных: δVNK, δVNW, δVNF, δVNCK, будет иметь вид:




Исходя из условия устойчивости Гурвица (а1a2-а0а3>0) и приемлемых характеристик переходного процесса были проведены расчеты, на основании которых выбраны значения коэффициентов:
k0=0.21/с, k1=2*10-1 1/с, k2=0,5, k3=1*10-2 1/с2, k4=6*10-2 1/с.
Как показывает выражение (2), в числителе стоит сомножитель (S2), который означает двукратное дифференцирование, поэтому ошибка по скорости (δVNK) и ошибка в определении координаты (δDNK) интегрированного канала не зависят от постоянной составляющей ошибки по скорости (δVNИ), то есть дрейфа, автономного канала ИНС.
Из выражения (3) видно, что установившееся значение (S стремится к нулю) выходного сигнала фильтра управления (δVNW) равно ошибке по скорости (δVNИ) автономного канала ИНС.
Для решения системы уравнений (1) на втором этапе представим ошибку по скорости автономного канала в зависимости от основных инструментальных погрешностей ИНС в виде известного выражения.

В выражении (7) обозначено:
ω - приведенный дрейф горизонтального канала ИНС;
α - ошибка начальной выставки ИНС в плоскость горизонта;
δА - ошибка акселерометра в измерении ускорений;
R - приведенный коэффициент контура Шулера ИНС;
ν - частота Шулера.
Применяя преобразование Лапласа к выражению (7) и подставляя поочередно в выражения (2)-(6), найдем решение для первого этапа во временной области с помощью метода гармонического баланса. Далее, используя значения искомых величин на момент времени t1 в качестве начальных условий, повторим аналогичные процедуры решения первого этапа для второго этапа, но уже с учетом новых исходных данных.
Установившееся решение относительно ошибки в определении координаты местоположения интегрированного канала в режиме самокоррекции (t>t1) в зависимости от инструментальных погрешностей ИНС можно представить в следующем виде

Для сравнения приведем известную ошибку в определении координаты местоположения автономного канала ИНС в зависимости от основных инструментальных погрешностей.

В таблице 1 приведены результаты расчетов ошибок по выражениям (8), (9) в конкретные моменты времени. При расчетах приняли следующие значения инструментальных погрешностей и параметров ИНС: ω=5·10-7 1/с, α=1·10-3 рад, δА=1·10-2 м/с2, t1=120 с,
R=6.4·106 м, g=9.81 м/с2, ν=1,24·10-3 1/с. Для минимизации объема расчетов численные значения величин α и δA/g приняли одинаковыми, так как для них ошибки по выражения (7), (8) изменяются по одинаковым законам и в данном случае будут равны между собой.
В скобках показаны результаты, полученные при решении системы уравнений (1) на компьютере без допустимых упрощений. Эти результаты очень близко совпадают с результатами аналитического решения системы уравнений (1), что подтверждает достоверность выражения (8).
Как видно из таблицы 1, точность интегрированного канала навигации существенно выше автономного, особенно большое различие имеет место из-за ошибки начальной выставки и ошибки акселерометра, которые, как известно, более сильно влияют, по сравнению с дрейфом, на точность автономного канала ИНС в начальный период ее работы. Например, ошибка интегрированного канала в зависимости от ошибки начальной выставки δDNK(α) в несколько десятков раз меньше автономного канала δDNИ(α), чем времени работы до 900 с, что позволяет сократить время готовности автономного канала ИНС за счет исключения режима точной выставки.
Для более убедительного подтверждения полученного технического результата в динамических режимах и оценки точностных характеристик было проведено математическое моделирование работы самоинтегрированной ИНС в условиях полета самолета для различных вариантов реализации предлагаемого способа и экспериментальное исследование лабораторных образцов.
При моделировании была принята известная математическая модель автономной ИНС с упрощенной моделью движения самолета и была дополнительно реализована математическая модель интегрированного канала навигации в соответствии с фиг.1. В модель автономной ИНС поступали соответствующие параметры движения самолета в осях ИНС. Текущие скорости с горизонтальных каналов математической модели ИНС в географической системе координат поступали на соответствующие входы интегрированного канала навигации. Таким образом, обеспечивалась работа автономного и интегрированного каналов навигации самоинтегрированной ИНС в условиях моделируемого полета самолета.
Так как способ самоинтеграции особенно эффективен при реализации в ИНС, построенных на грубых чувствительных элементах, которые применяются на летательных аппаратах и других объектах с небольшим временем работы, поэтому моделирование проводилось для таких ИНС. При моделировании оценивалось влияние на точность интегрированного канала времени подготовительного режима, динамики изменения дрейфа и других погрешностей ИНС.
Моделирование проводилось при следующих условиях, во всех реализациях параметры полета самолета и маршрут были одинаковыми, так как это практически не влияет на точность при больших инструментальных погрешностях ИНС. По окончании подготовительного режима интегрированного канала самолет начинал взлет, набирал высоту и скорость и далее летел со скоростью 200 м/с. Во всех реализациях автономный и интегрированный каналы навигации начинали одновременное счисление координат местоположения с момента перевода автономного канала ИНС в рабочий режим и продолжали счислять в процессе подготовительного режима интегрированного канала и далее в процессе полета самолета. Инструментальные погрешности задавались с учетом того, что в ИНС, для сокращения времени готовности, отсутствовал режим точной выставки и калибровки дрейфов.
В таблице 2 показаны ошибки в определении координат (в метрах) интегрированного и автономного каналов навигации ИНС в определенные моменты времени при различных значениях времени подготовительного режима интегрированного канала (t1) 120 с, 150 с и 180 с.
Во всех трех реализациях таблицы 2 инструментальные ошибки ИНС были одинаковыми, а менялась только величина t1, поэтому ошибки автономного канала δDNИ, δDЕИ, независящие от величины t1, в этих реализациях тоже были одинаковыми и в таблице 2 приведены для одной реализации (второй и третий столбец). В четвертом и пятом столбце таблицы 2 приведены ошибки интегрированного канала δDNK, δDEK при t1=120 с, в шестом и седьмом столбце при t1=150 с, в восьмом и девятом при t1=180 с.
Реализации в таблице 2 получены при следующих значениях инструментальных ошибок ИНС.
Ошибки начальной выставки ИНС в плоскость горизонта составляли 3·10-3 рад по каждому каналу, в азимуте 8·10-3 рад.
Ошибки в измерении ускорений составляли 2·10-2 м/с2 по каждому каналу, задавались с учетом отсутствия компенсации кориолисовых ускорений в грубой ИНС.
Дрейф по азимутальному и горизонтальным каналам ИНС задавался в соответствии со следующим выражением

Как показывает выражение (10), дрейф имеет следующие составляющие:
- постоянную, равную 5·10-7 1/с;
- скачкообразную, равную 2·10-7 1/с, N1=210 с, момент скачка;
- случайную (оmc), изменяющуюся по закону Гаусса со среднеквадратическим отклонением, равным 5, в итоге 25·10-8 1/с;
- нарастающую со временем (тренд), равную 5·10-10 1/с2.
Как видно из таблицы 2, с увеличением значения t1 от 120 до 180 с точность интегрированного канала улучшается, особенно это заметно при времени работы ИНС до 300-400 с.
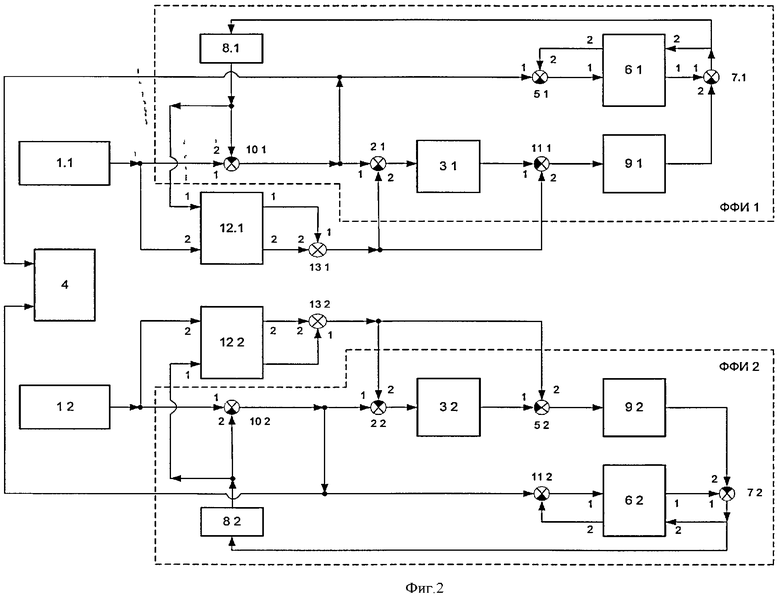
На фиг.3 показана динамика изменения дрейфа, соответствующая выражению (10), за исключением того, что N1=180 с, где обозначено:
drxl - дрейф по осям ИНС, соответствует обозначению ω;
time - время работы ИНС в секундах, соответствует обозначению t;
х - масштаб одной клетки по горизонтальной оси по времени (х=94 с);
y - масштаб одной клетки по вертикальной оси (y=1,416·10-7 1/с).
Как видно из фиг.3, дрейф из начального положения 5·10-7 1/с изменяется в диапазоне от 2,678·10-7 1/с до 16,343·10-7 1/с.
В таблице 3 показано влияние инструментальных ошибок ИНС на точность автономного и интегрированного каналов (м).
В первой реализации (первые четыре столбца после столбца t) поменяли знак плюс на минус у значения ошибки выставки в азимуте, а во второй (последние четыре столбца) поменяли знак у значения ошибки в измерении ускорений, остальные ошибки остались равными значениям для таблицы 2. Реализации в таблице 3 получены при t1=180 с.
Как видно из таблиц 2 и 3, при указанных значениях инструментальных погрешностей влияние ошибки выставки в азимуте на точность автономного и интегрированного каналов менее весомо, чем ошибки в измерении ускорений и дрейфа.
Таким образом, результаты моделирования показали, что точность интегрированного канала может быть выше автономного в несколько десятков раз. А при использовании ИНС на объектах со временем работы до 300-400 с можно достичь точность интегрированного канала, путем выбора значения t1, соизмеримую с точностью СНС GPS/ГЛОНАСС. Например, при времени t1=180 с, времени полета t=300 с (таблицы 2, 3) ошибки интегрированного канала имеют значение порядка 1 м при указанных значениях инструментальных ошибок ИНС.
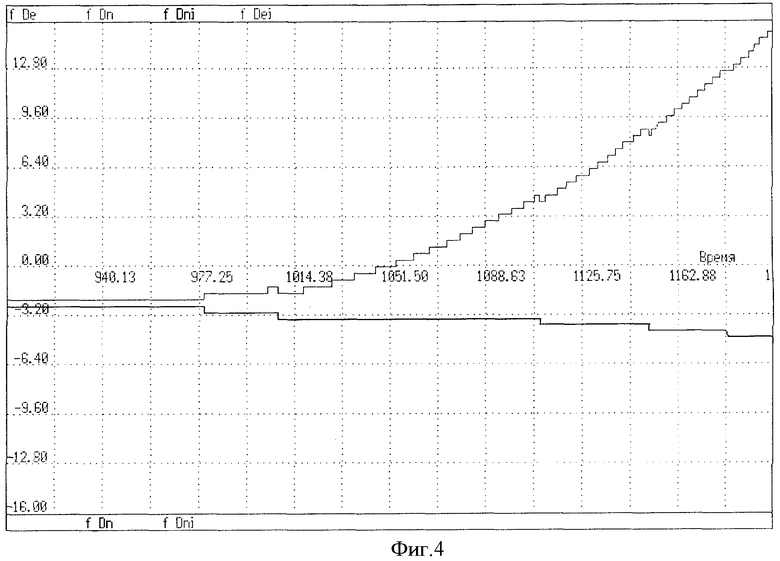
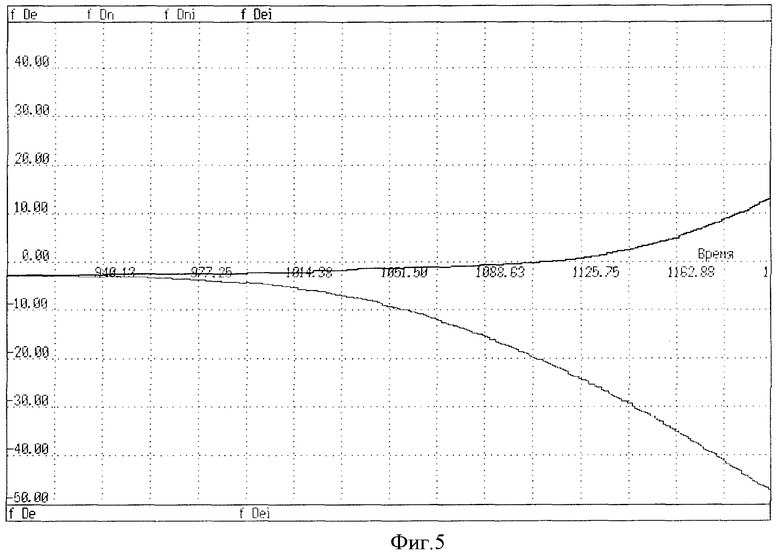
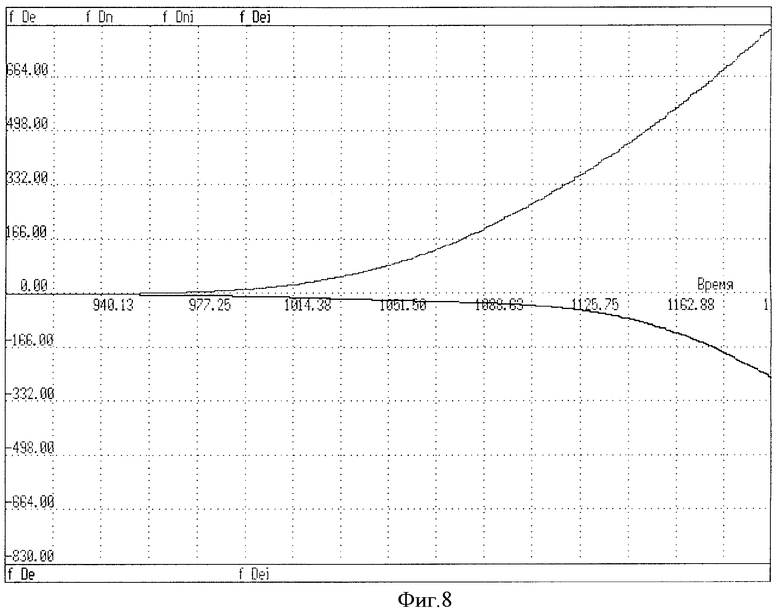
На фиг.4÷8 представлены результаты эксперимента на лабораторном образце самоинтегрированной ИНС. Образец был создан на основе бесплатформенной ИНС БИНС-АК, разработанной АНПП "ТЕМП-АВИА" г.Арзамас и персонального компьютера. БИНС-АК имеет дрейф на уровне 5·10-7 1/с. Навигационная информация с БИНС-АК поступала в компьютер, в котором был реализован интегрированный канал навигации в соответствии с фиг.1 и выражением (1).
Эксперимент проводился следующим образом. Система БИНС-АК была установлена на поворотном стенде и с помощью оптических средств было определено начальное положение ее продольной оси относительно Севера, этот угол вводился в БИНС-АК перед началом ее работы (выставка по заданному курсу). После окончания процесса точной выставки, который в данном эксперименте длился около 800 с, автономный канал навигации БИНС-АК переводился в рабочий режим, одновременно с этим начинал работать интегрированный канал навигации в подготовительном режиме в течение 120 с, затем примерно на 900 с он переводился в рабочий режим.
На фиг.4 и 5 приведены ошибки автономного и интегрированного каналов навигации (в метрах) соответственно в определении географической широты и долготы на интервале времени 300 с. В конце интервала ошибки автономного и интегрированного каналов соответственно имели следующие значения:
- в определении географической широты 15,2 м и -2,9 м;
- в определении географической долготы - 47 и 12,4 м.
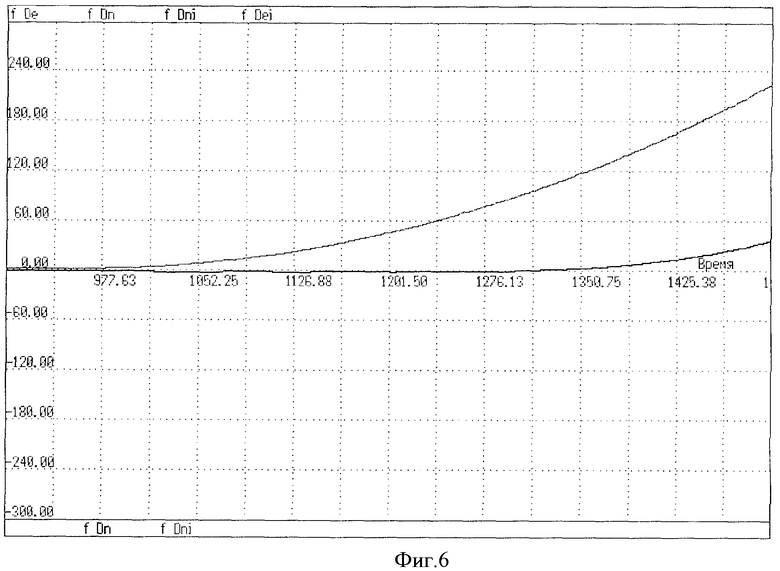
На фиг.6 приведены ошибки автономного и интегрированного каналов навигации в определении географической широты на интервале времени 600 с, в конце интервала они соответственно 226 м и 36 м.
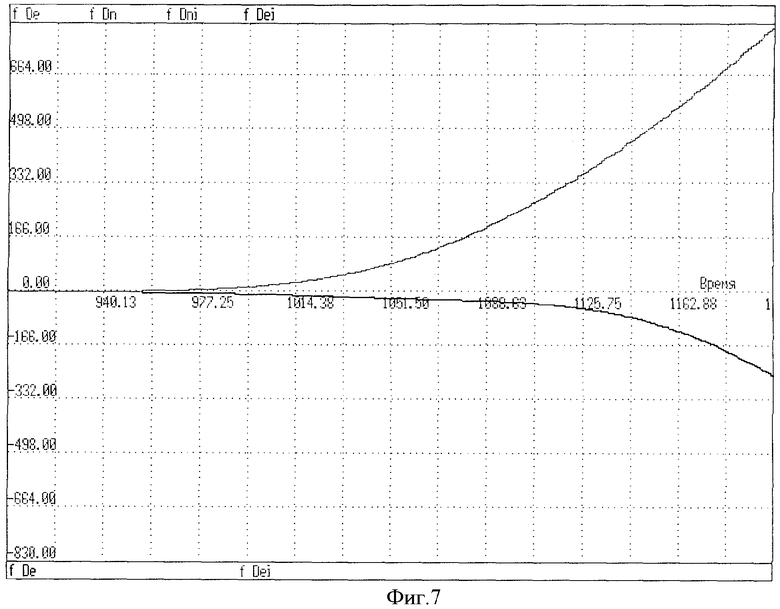
Результаты эксперимента, приведенные на фиг.7 и 8, аналогичны эксперименту на фиг.4 и 5, за исключением того, что начальный азимутальный угол БИНС-АК задавали с ошибкой 0,5 градуса. В конце интервала ошибки автономного и интегрированного каналов соответственно имели следующие значения:
- в определении географической широты 47 м и -1 м;
- в определении географической долготы 802 и -251 м.
Таким образом, результаты эксперимента показали, что во всех реализациях точность интегрированного канала навигации существенно выше точности автономного канала, и подтвердили результаты аналитических расчетов и математического моделирования.
Для оценки способа самоинтеграции навигационной информации ИНС при ее самокоррекции в составе ИСНС на интервалах неработоспособности приемника СНС также было проведено математическое моделирование и лабораторный эксперимент.
При математическом моделировании использовались описанные ранее модели ИНС, движения самолета и интегрированного канала, а скорость приемника СНС по горизонтальным каналам задавалась путем добавления к скорости самолета случайной ошибки уровнем 0,1 м/с, которую устранял ФФИ до уровня 0,02 м/с. Инструментальные ошибки ИНС соответствовали ее уровню точности в определении координат местоположения 1,85 км за 1 час. Значения инструментальных ошибок ИНС для сравнения во всех реализациях были одинаковы.
Математическое моделирование проводилось по следующей методике. Одновременно с началом работы автономного канала ИНС и приемника СНС начинал работать интегрированный канал навигации в инерциально-спутниковом режиме (на фиг.1 переключатели П1 разомкнуты, а П2 замкнут). По истечении определенного времени t1 прерывали поступление скорости приемника СНС в интегрированный канал навигации и он переходил в режим самокоррекции (на фиг.1 переключатели П1 замкнуты, а П2 разомкнут). В момент времени t2 приемник СНС вновь возобновлял работу и его скорость поступала в интегрированный канал навигации и он переходил в инерциально-спутниковый режим работы (на фиг.1 переключатели П1 разомкнуты, а П2 замкнут). Таким образом моделировались интервалы неработоспособности приемника СНС и режимы самокоррекции ИНС.
Результаты математического моделирования представлены в таблице 4, в которой приведены значения приращения ошибок в определении географической долготы и широты интегрированного (δDEK, δDNK) и автономного канала (δDEИ, δDNИ), а также значения приращений ошибок по скорости интегрированного канала (δVEK, δVNK) за 300 с в режиме самокоррекции ИНС. При моделировании было сделано 30 реализаций продолжительностью 9200 с, которые отличались только временем начала t1 и конца t2 режима самокоррекции ИНС.
Среднеквадратические ошибки (СКО) по 30 реализациям в конце режима самокоррекции в определении географической долготы и широты соответственно составили:
- в интегрированном канале навигации 16,1 м и 11,2 м;
- в автономном канале навигации 131 м и 265 м.
Результаты моделирования показали, что точность интегрированного канала навигации в режиме самокоррекции в несколько раз выше точности автономного канала навигации.
Для подтверждения результатов моделирования был проведен лабораторный эксперимент на системе ИСНС-4, созданной в ГосНИИАС как экспериментальный образец в соответствии с патентом РФ №2233431 от 27.07.2004 г., авторы Волжин А.С., Вязьмикин А.А. и другие.
Система ИСНС-4 построена на основе платформенной ИНС И-21, разработанной МИЭА, приемника СНС СН-3700 фирмы "Навис" и персонального компьютера, в котором осуществляется физическая интеграция навигационной информации ИНС и приемника СНС.
Так как в системе ИСНС-4 отсутствовал режим самокоррекции ИНС, то в ее компьютере был реализован интегрированный канал навигации в соответствии с фиг.1 и выражением (1).
Эксперимент проводился по методике математического моделирования. Было сделано 20 реализаций, результаты которых представлены в таблице 5.
Среднеквадратические ошибки (СКО) по 20 реализациям в конце режима самокоррекции в определении географической долготы и широты соответственно составили:
- в интегрированном канале навигации 15,2 м и 15,4 м;
- в автономном канале навигации 128 м и 95 м.
Из таблиц 4 и 5 видно, что значения СКО интегрированного канала очень близко совпадают и подтверждают эффективность способа при работе ИНС в режиме самокоррекции в составе ИСНС. Некоторое различие значений СКО автономного канала ИНС можно объяснить тем, что при математическом моделировании, для сравнения, инструментальные ошибки ИНС были одинаковы во всех реализациях и заданы в соответствии с технической документацией для условий полета, а в экспериментах инструментальные ошибки могут отличаться от запуска к запуску как по значению, так и по знаку, в пределах заданного уровня.
Таким образом, результаты аналитических расчетов, математического моделирования и экспериментальных исследований подтверждают технический результат и цель предложения.
Основная цель предложения в отличие от прототипа - повышение точности ИНС путем самоинтеграции собственной навигационной информации и самокоррекции - достигнута, что позволяет использовать грубые и дешевые самоинтегрированные ИНС, сохраняя при этом относительно высокую точность при низкой себестоимости. Эти качества расширяют их область применения в различных сферах.
Способ и самоинтегрированные ИНС, созданные на его основе, могут быть использованы на летательных аппаратах различного назначения и других объектах с относительно небольшим временем работы до 20 минут, а также в составе ИСНС без ограничения времени работы на самолетах, других летательных аппаратах, морских судах и наземных средствах передвижения и рекомендованы для внедрения организациям и фирмам, занимающимся созданием, испытаниями и эксплуатацией ИНС и ИСНС на их основе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2233431C1 |
| Способ самокоррекции спутниковых навигационных приёмников и устройство для его осуществления | 2022 |
|
RU2794703C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2019 |
|
RU2725029C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
Изобретение относится к области приборостроения и может быть использовано при проектировании инерциальных навигационных систем (ИНС) для летательных аппаратов и других подвижных объектов. Технический результат - повышение точности. Для достижения данной цели в ИНС дополнительно с автономным каналом формируют интегрированный канал навигации на основе фильтра физической интеграции (ФФИ). В ФФИ обеспечивают самоинтеграцию собственных скоростей автономной и скорректированной ИНС. При этом осуществляют непрерывную коррекцию ошибок ИНС. 2 н. и 1 з.п. ф-лы, 8 ил., 5 табл.
1. Способ интеграции навигационной информации, включающий построение дополнительного интегрированного канала навигации, содержащего фильтр физической интеграции в каждом горизонтальном канале и блок вычисления интегрированных навигационных параметров, интеграцию одноименных скоростей горизонтальных каналов инерциальной навигационной системы и приемника спутниковой навигационной системы, для чего направляют сигналы по скоростям инерциальной навигационной системы на первый вход фильтров физической интеграции, а сигналы по скоростям приемника спутниковой навигационной системы - на второй и третий вход фильтров физической интеграции, в них одновременно фильтруют ошибки инерциальной навигационной системы и приемника спутниковой навигационной системы и формируют интегрированные скорости, затем на их основе вычисляют интегрированные координаты местоположения объекта, отличающийся тем, что вместо интеграции одноименных скоростей горизонтальных каналов инерциальной навигационной системы и приемника спутниковой навигационной системы выполняют самоинтеграцию автономных и скорректированных скоростей инерциальной навигационной системы, при этом вместо внешней коррекции ошибок инерциальной навигационной системы от приемника спутниковой навигационной системы осуществляют самокоррекцию ее ошибок, для чего дополнительно формируют скорректированные скорости путем коррекции автономных скоростей с помощью сигналов на коррекцию ошибок, сформированных фильтрами физической интеграции, затем направляют скорректированные скорости на второй и третий входы фильтров физической интеграции вместо скоростей приемника спутниковой навигационной системы, при этом при реализации способа в автономной инерциальной навигационной системе скорректированные скорости направляют с задержкой по отношению к автономным скоростям, перед началом движения объекта фильтры физической интеграции одновременно фильтруют ошибки инерциальной навигационной системы и формируют интегрированные скорости, затем на их основе вычисляют интегрированные координаты местоположения объекта, при этом автономный инерциальный и интегрированный канал навигации начинают счисление координат одновременно с переводом инерциальной навигационной системы в рабочий режим.
2. Способ интеграции навигационной информации по п.1, отличающийся тем, что при его реализации в инерциальной навигационной системе, работающей в составе инерциально-спутниковой навигационной системы, скорректированные скорости формируют по сигналу приемника спутниковой навигационной системы в начальные моменты интервалов его неработоспособности и направляют без задержки в процессе движения объекта на второй и третий входы фильтров физической интеграции, которые осуществляют самокоррекцию ошибок инерциальной навигационной системы, затем при появлении сигнала работоспособности приемника спутниковой навигационной системы его скорости вновь направляют на второй и третий входы фильтров физической интеграции вместо скорректированных скоростей инерциальной навигационной системы, далее этот процесс повторяют на каждом интервале неработоспособности приемника спутниковой навигационной системы.
3. Инерциально-спутниковая навигационная система, содержащая инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления интегрированных навигационных параметров, фильтр физической интеграции в каждом горизонтальном канале, который включает первый, второй, третий, четвертый и пятый сумматоры, фильтр коррекции, первый интегратор с обратной связью, второй интегратор без обратной связи, фильтр управления, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления интегрированных навигационных параметров и с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы первых сумматоров соединены со входами фильтров коррекции, выходы которых соединены с первыми входами пятых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы пятых сумматоров соединены со входами вторых интеграторов без обратной связи, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами первых интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами первых интеграторов с обратной связью и входами фильтров управления, вторые выходы первых интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами первых интеграторов с обратной связью, отличающаяся тем, что исключен приемник спутниковой навигационной системы, в результате этого она становится самоинтегрированной инерциальной навигационной системой, в каждый горизонтальный канал которой дополнительно включены блок коммутации и задержки и шестой сумматор, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы, кроме того, соединены со вторыми входами блоков коммутации и задержки сигналов, первые входы которых с соединены с выходами фильтров управления, а его первый и второй выходы соединены соответственно с первыми и вторыми входами шестых сумматоров, выходы которых соединены со вторыми входами первых и пятых сумматоров.
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| US 5237952 A, 24.08.1993 | |||
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-8. | |||

