Изобретение относится к машиностроению и предназначено для использования в промышленных манипуляторах, применяемых для подъемно-транспортных и технологических операций при укладке изделий.
Известны манипуляторы, содержащие схват, механизмы его вертикального перемещения и поворота.
Наиболее близким по технологической сущности является манипулятор, состоящий из руки, схвата и двух механизмов его поворота. Каждый из этих механизмов выполнен в виде водила, пары коаксиально закрепленных относительно друг друга втулок с фланцами на торцах, причем одна из втулок каждой пары соединена гибкой связью с соответствующим ей зубчатым колесом механизма поворота.
Как выяснилось при создании и испытании опытного образца, данное конструктивное исполнение привода механизма поворота включает много деталей, влечет за собой увеличение его габаритов и снижает надежность работы. Кроме того, появляется возможность проскальзывания гибкого элемента (ремня в пазах втулки). Увеличение же силы натяжения этого элемента приводит к росту момента сопротивления при повороте водила и усиления на пневмоцилиндре.
Задачей изобретения является повышение надежности, снижение массы и избежание проскальзывания гибких элементов за счет упрощения и изменения конструкции механизмов поворота манипулятора.
Технический результат достигается тем, что в устройстве, состоящем из руки, схвата и механизмов его поворота в виде двух подвижных водил с шарнирными опорами и силовыми цилиндрами, в пазах каждый фланцевой втулки закреплены одними концами два гибких элемента, другие концы которых соединены со штоком своего силового пневмоцилиндра.
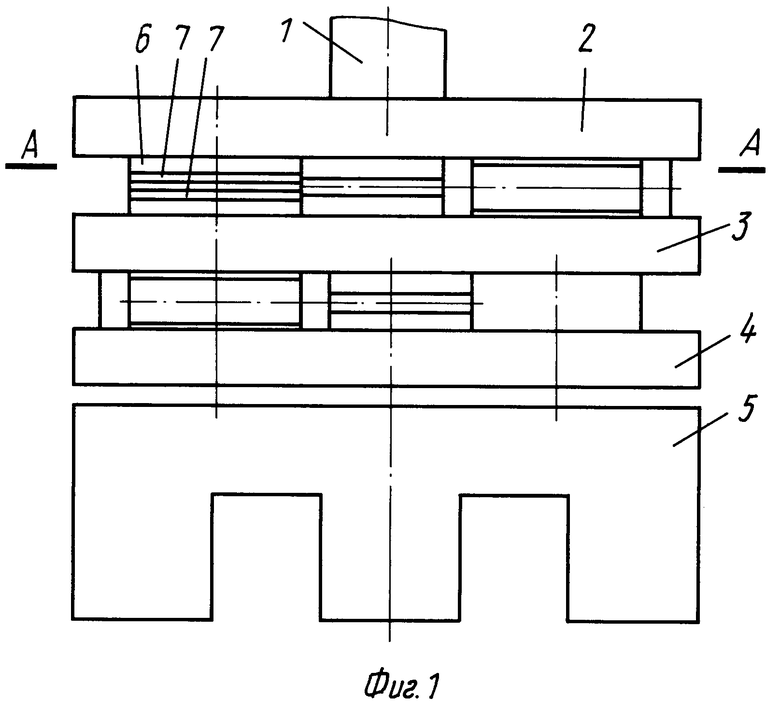
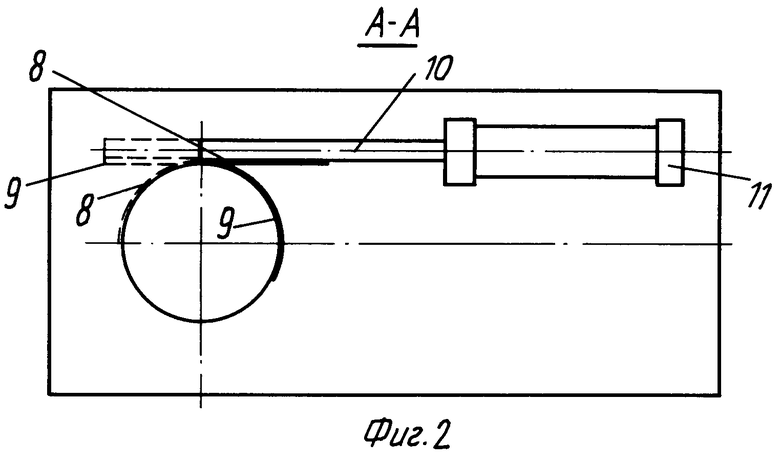
На фиг.1 представлено устройство, общий вид; на фиг.2 разрез А-А на фиг. 1. Манипулятор содержит руку 1 с закрепленной на ней рамой 2, подвижные верхнее 3 и нижнее 4 водила, схват 5, жестко соединенный с водилом 4. На раме 2 и водиле 3 закреплены симметрично относительно оси руки и параллельной ей поворотные опоры. Фланцевые втулки 6 опоры имеют пазы 7, в которых находятся гибкие элементы 8, 9 (например, ленты металлические), одним концом закрепленные к фланцевым втулкам, другим концом к штоку 10 силового цилиндра 11. Пунктиром на фиг.2 показано второе крайнее положение штока и гибких элементов.
Манипулятор работает следующим образом.
При срабатывании верхнего силового цилиндра 11 его шток 10 перемещается вправо и воздействует на гибкий элемент 9, который поворачивает фланцевую втулку 6 по часовой стрелке. Последняя жестко связана с верхним водилом 3 и поворачивает его на необходимый угол. Совместно с верхним водилом поворачивается нижнее водило 4 и схват 5. Рабочий цикл поворота совершен. Возвращение водила 3 в исходное положение обеспечивается обратным ходом штока 10 и другим гибким элементом 8. При этом данный элемент жестко закреплен на штоке и заставляет поворачиваться фланцевую втулку 6 против часовой стрелки.
При срабатывании нижнего силового цилиндра его шток воздействует аналогично на фланцевую втулку нижней поворотной опоры, вследствие чего поворачивается нижнее водило 4 со схватом 5 на требуемый угол. Обратный ход штока нижнего силового цилиндра обеспечивает возвращение нижнего водила 4 в исходное положение. Соединение штока 10 силового цилиндра 11 с поворотной опорой посредством гибкого элемента 8, 9 значительно упрощает конструкцию механизма поворота, так как отпадает потребность в зубчатой рейке, шестерне и ее опоре, а также малом шкиве, уменьшает число элементов механизма и повышает тем самым надежность работы.
Путем установки гибких элементов различной длины и изменения хода штока можно получить разный угол поворота схвата, а гибкий элемент позволяет обеспечить плавность хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1990 |
|
SU1808690A1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Устройство для сборки втулок цилиндров тяжелых дизелей | 1983 |
|
SU1184639A1 |
| Механизм поворота исполнительного органа манипулятора | 1987 |
|
SU1481054A1 |
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для подъемно-транспортных и технологических операций по укладке изделий. Задача изобретения повышение надежности манипулятора за счет упрощения конструкций и уменьшение числа элементов конструкции. Сущность изобретения заключается в том, что устройство содержит поворотные опоры в виде коаксиально расположенных и жестко соединенных между собой фланцевых втулок, каждая из которых содержит пазы, в которых находятся гибкие элементы, одним концом закрепленные к фланцевым втулкам, другим концом к штоку силового цилиндра. 2 ил.
МАНИПУЛЯТОР, содержащий руку со схватом и размещенные один под другим механизмы поворота схвата, каждый из которых включает в себя установленное на шарнирной опоре, имеющей фланцевую втулку с торцевыми пазами, подвижное водило и силовой цилиндр, отличающийся тем, что в пазах каждой фланцевой втулки закреплены одними концами два дополнительно введенных гибких элемента, другие концы которых соединены со штоком соответствующего силового цилиндра.
| Манипулятор | 1990 |
|
SU1808690A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
