Изобретение относится к машиностроению и может быть использовано в станках роторного типа с механическим приводом исполнительных органов, в частности в роторе мойки штучных изделий в составе автоматической роторной линии.
Цель изобретения - расширение технологических возможностей ротора.
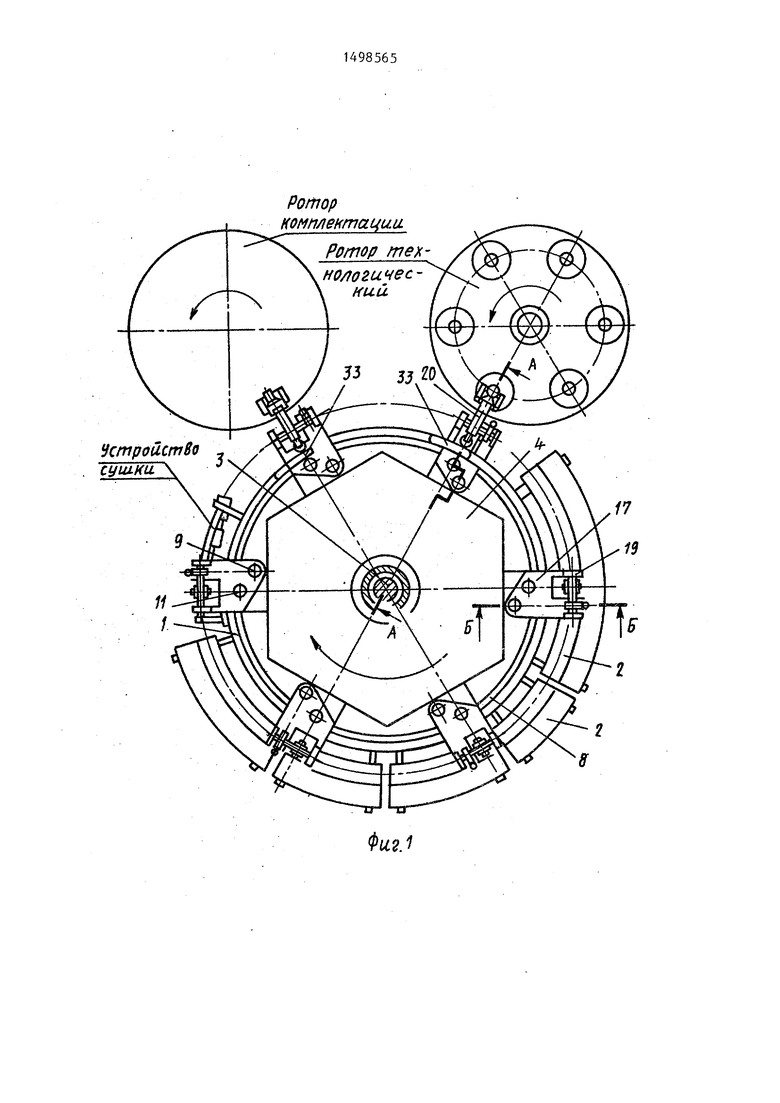
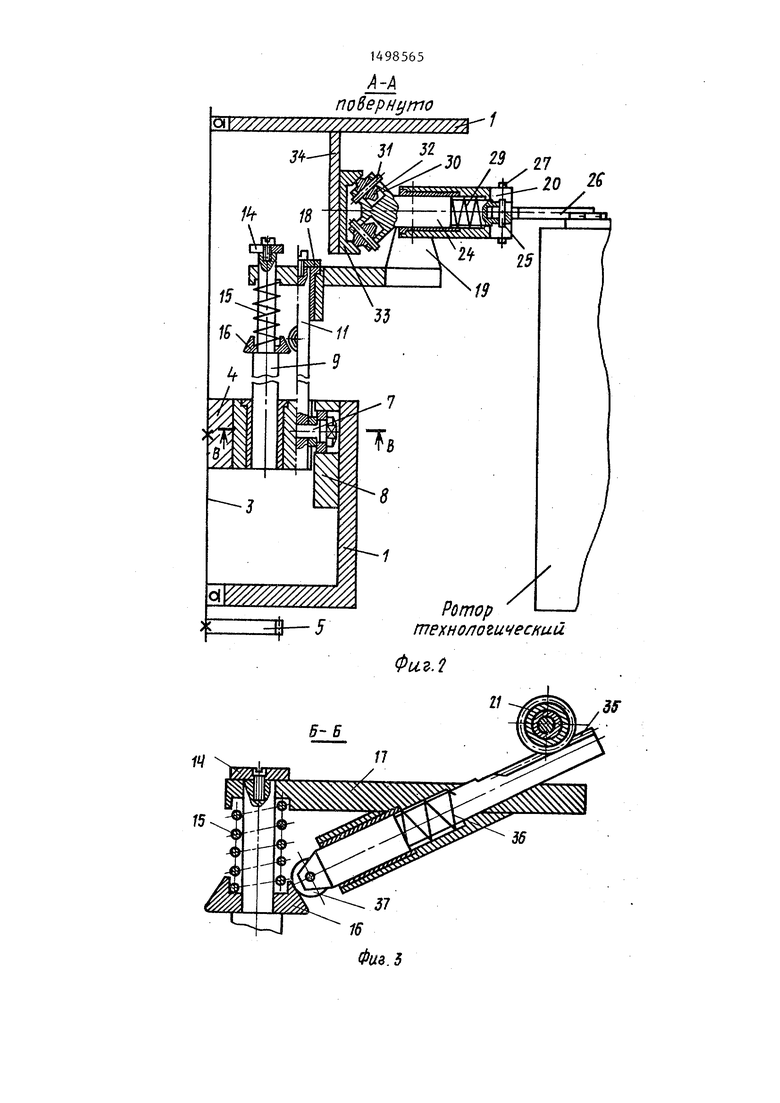
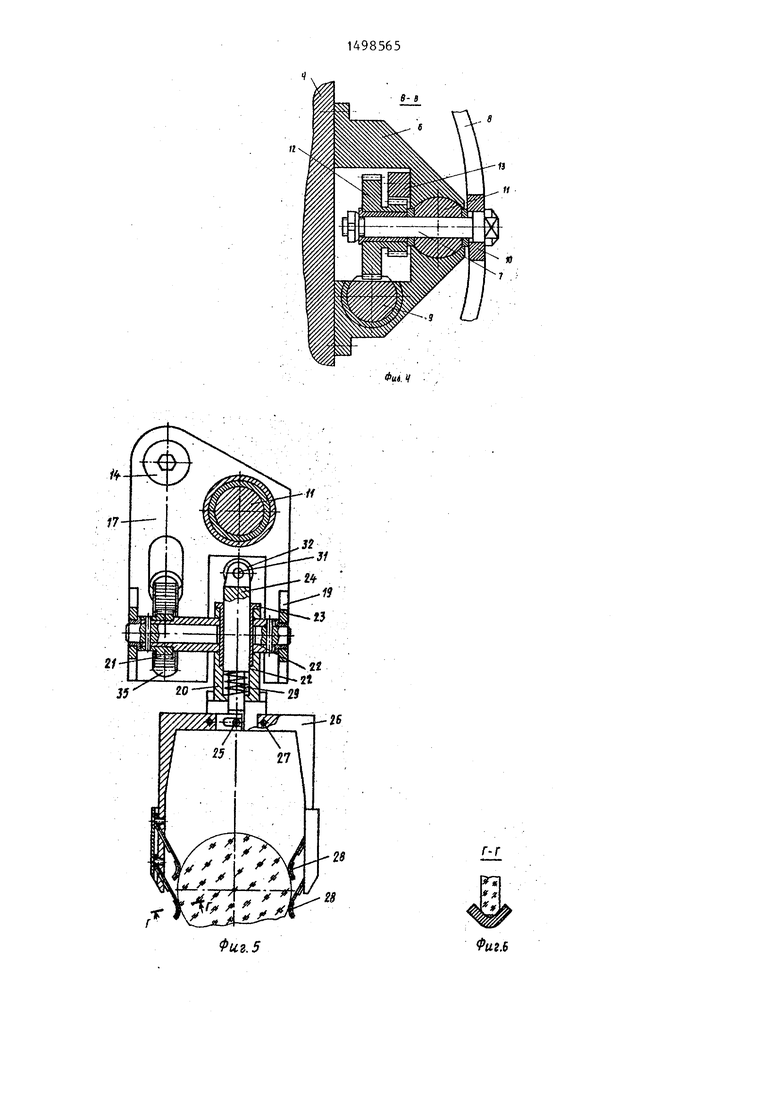
На фиг.1 изображен транспортно- технологический ротор, вид сверху; на фиг о 2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на-фиг.; на фиг.4 - разрез В-В на фиг.2;на фиг.З- кронштейн с захватным органом; на фиг.6 - разрез Г-Г на фиг.5; на
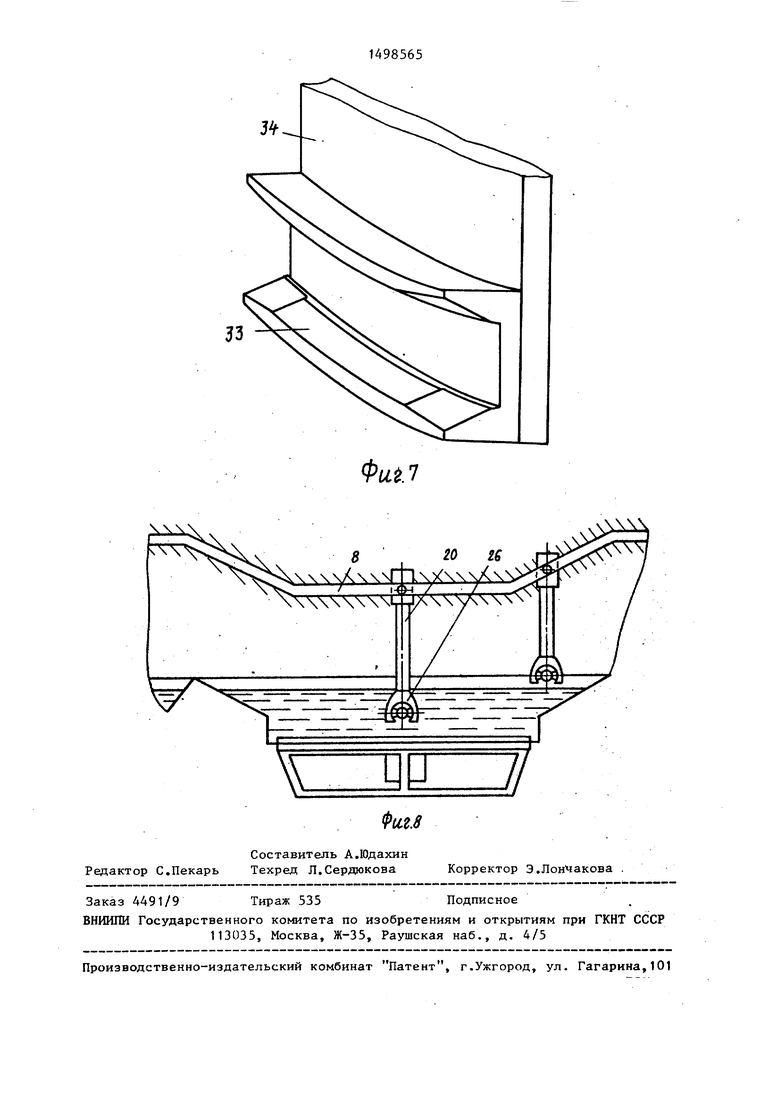
фиг.7 - кронштейн с упором;на фиг.8- часть ротора в зоне технологической ванны.
Ротор содержит станину 1 с размещенными вокруг нее по окружности технологическими ваннами 2, верти- кальнь1Й вал 3, установленный на под- шипниковьпс опорах, находящихся в станине 1, и закрепленный на валу 3 барабан 4., Нижний конец вала 3 по- сгредство м зубчатого колеса 5 связан с вертикальными валами технологического ротора и ротора комплектации (не обозначены). В барабане 4 равномерно по окружности по числу рабочих позиций технологических роторов
Jib СО 00 СП
сь
ел
3
закреплены суммирующие механизмы 6,
в состав которых входят насаженные на ось 7 между копирным пазом 8, выполненньш на станине, и выходным исполнительным ползуном 9, вьтолнен ным в виде подвижной зубчатой рейки, ролик 10, связанньш с пазами 8 копира направляющий ползун 11, блок колес 12 ,с двумя зубчатыми венцами, взаимодействующими с неподвижной рейкой 13 и рейкой, выполненной на ползуне 9, на котором посредством концевого упора 14 через пружину 15 закреплен кулачок 16 и кронштейн 17 установленный с возможностью возвратно-поступательного перемещения на ползуне 11, в верхней части которого закреплен концевой упор 18, фиксирующий ход кронштейна в верхней части ползуна 11 о В общем случае блок колес 12 может иметь два венца: малый диаметром d, взаимодействующий с неподвижной рейкой 13, и большой диаметром D, взаимодействующий с подвижной рейкой - исполнительным ползуном 9. В этом случае, скорость перемещения исполнительного ползуна 9 и путь будут больше скорости перемещения и пути направляющего ползуна 11 в (1 + -7-) раз .а
т.ео осуществляется последователь- .ное соединение механизмов для получения большего передаточного отношения. Кроме того, в указанную кинематическую цепочку введены пружина 15, кулачок 16 и концевой упор 14, образующие обратную связь, т.е. при силовом замыкании ползунов 9 и 11 через пружину 15 направляющей ползун будет перемещать кронштейн 17 согласно своей скорости (один), а исполнительный ползун 9 используется для других целей, например для поворота захватного органа со скоростью 2 (два) или 3 (три). В проупмнах 19 кронштейна 17 на опорах скольжения установлены полуоси с заштифтованными на них корпусом 20 и зубчатым колесом 21. Корпус 20 выполнен в виде двух пересекающихся расточенных внутри цилиндров 22, в одном из которых установ пены указанные полуоси, а в другом - в направляюп(ей втулке 23 толкатель 24, соединенный посредством оси 25 с двумя угловыми рычагами - захватн ми лапами 26, насаженными в корпусе
0
20 на осях 27. На вторых концах двуплечих рычагов - з.ахватных лап 26 - закреплены упругие схваты 28, удерживаюш е оптические детали за фаски Толкатель 24 с угловыми рьмагами - захватными лапами 26 - поджат на корпус 20 пружиной 2У. Толкатель 24 выполнен с хвостовиком, В пазах 30
Q хвостовика установлены на осях 31 ролики 32 под углом к упору 33, закрепленному на станине с помощью, кронштейна 34, что обеспечивает не- обохдимую точность и жесткость тол5 кателя 24 и двуплечих рычагов - захватных лап 26 - при приеме - переда- че деталей на позициях технологических роторов. В цилиндрической расточке каретки 17 между кулачками 16
0 и корпусом 20 в зацеплении с зубчатым колесом 21 смонтирована рейка 35, поджатая пружиной 36 на корпус кронштейна 17. В пазах рейки 35 на оси установлен ролик 37, контакти5 руюш;ий с конусообразной поверхностью кулачка 16, что позволяет при перемещении по вертикали исполнительного ползуна 9 после его рассогласования с движением направляющего ползуна 11 перемещать рейку 35 и поворачивать зубчатое колесо 21 с корпусом 20.
Транспортно-технологический ротор работает следующим образом.
Транспортно-технологический ротор совметсно с технологич еским ротором, и ротором комплектации вращается непрерывно и синхронно. При вращении вала 3 получает вращение барабан 4 с суммирующими механизмами 6 и кронштейнами 17. При вращении ползуны 11 взаимодействуют через ось 7 и ролик 10 с пазами 8 копира, получая вертикальное возвратно-поступательное перемещение. При ходе ползуна 11 по вертикали вверх для приема детали, например, с технологического ротора один из зубчатых венцов блока колес 12 обкатывает ся по неподвижной рейке 13, а дру0 гой, находясь в зацеплении с исполнительным ползуном 9, выталкивает его из барабана 4 с больщей скоростью и на большее расстояние, чем перемещение ползуна 11. Кронштейн
5 17 перемещается по вертикали со ско яростью исполнительного ползуна 9, а ползун 11 вьтолняет функцию направляющего. При дальнейшем перемещении вверх по вертикали полуз5
0
5
20
25
нов 9 и 11 кронштейна 17 направляющий ползун 11 заканчивается и кронштейн 17 начинает контактировать с концевым упором 14. Поскольку скорости ползунов 9 и 11 разные, например ползун 9 имеет скорость 3 (три), а ползун 11 скорость 1 (один), происходит силовое замыкание, при кото- ром деформируется пружина 15, и пол- зун 9 посредством кулачка 16 через зубчато-реечную пару 35, 21 позора-- чивает корпус 20, изменяя его положение в горизонтальной плоскости. При установке угловьк рычагов захватных ig лап 26 взаимно параллельно с деталью на рабочей позиции технологического ротора ролик 10, ползун 11 и 9 своего положения не изменяют, а угловые рычаги - захватные лапы 26 - находятся в положении для приема готовой детали. При дальнейшем вращении барабана 4 ролики 32 встречают упор 33 и начинают контактировать с его заходными кромками. Толкатель 24, получив радиальное перемещение, посредством осей 25 и 27 перемещает короткие плечи двуплечих рычагов захватных лап 26 и разводит вторые плечи с упругими губками на величину, большую диаметра детали. Ролики 32 устанавливаются на базирующих дорожках упора 33. При совмещении траекторий упругих губок с осью го-г товой детали, установленной в рабочей позиции технологического ротора, ролики 32 сходят с базирующих дорожек упора 33 и пружина 29 возвращает толкатель 24 в исходное положение, ри этом большие плечи рычагов захватных лап 26 сходятся и упругие губки захватывают за фаски очередную готовую деталь с базирующих штоков патрона технологического ротора. осле прохода кронштейном 17 зоны ехнологического ротора ползун 11, взаимодействуя через ось 7 и ролик 10с пазами копира получает вертикальное возвратное перемещение озвращаясь быстрее ползуна 11, ползун 9 производит их силовое размыка- 0 ие и концевой упор 14 сопровождает ронштейн 17 по направляющему ползуу 1 1 к первой промывочной ванне. дновременно под воздействием выпрям30
35
40
45
0
5
Q g
0
5
0
5
ляющейся пружины рейка 35- возвращается по конусной поверхности кулачка 16 в исходное положение и поворачивает зубчатое колесо 21 Корпус 20 под собственным весом и воздействием зубчатого колеса 21 устанавливает двуплечий рычаг с готовой деталью в необходимое положение для промывки, например в- вертикальное. Перевод детали из ванны в ванну осуществляется от возвратно-поступательного перемещения корпуса 20, получаемого посредством входящих в зубчато- реечный механизм оси 7 ролика 10 и ползуна 9, взаимодействующих с пазом 8 копира. При передаче деталей в ротор комплектации цикл повторяется.
Формула изобретения
Транспортно-технологический ро- тор, содержащий станину с размещенными вокруг нее по окружности технологическими ваннами и приводным валом с закрепленным на нем барабаном с кронштейнами, снабженными средствами для крепления деталей, и средство вертикального перемещения кронштейнов, включающее установленные на барабане ролики и выполненньш в станине копирный паз, отличающийся тем, что, с целью расширения его технологических возможностей, средство вертикального перемещения кронштейнов имеет установленные в барабане суммирующие зубчато- реечные механизмы, направляющие ползуны и снабженные, кулачками исполнительные ползуны,причем каждый направляющий и исполнительный ползун взаимодействует с соответствующим кронштейном и через суммирующий зубчато- реечньш механизм с соответствующим роликом, при этом средство для крепления деталей вьтолнено в виде шарнирно установленного на соответствующем кронштейне захватного органа с толкателем и имеет размещенные на станине и. взаимодействующие с толкателем упоры и зубчато-реечный механизм, выполненный с возможностью взаимодействия с кулачком исполнительного ползуна и захватным органом.
POfflOp
комплентациа Ротор fne)(
ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| Роторная машина | 1989 |
|
SU1692820A1 |
| Загрузочный ротор | 1989 |
|
SU1646783A1 |
| Установка для очистки изделий | 1989 |
|
SU1622033A1 |
| Роторная линия | 1989 |
|
SU1710302A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Устройство для укладки цилиндрических изделий в тару | 1987 |
|
SU1442456A1 |
Изобретение относится к машиностроению, касается к мойки штучных изделий и позволяет расширить технологические возможности транспортно-технологического ротора. Ротор содержит станину с размещенными вокруг нее по окружности технологическими ваннами и приводным валом. На валу закреплен барабан с кронштейнами, снабженными средствами для крепления деталей. Ротор имеет средство вертикального перемещения кронштейнов, включающее выполненный в станине копирный паз и установленные в барабане суммирующие зубчато-реечные механизмы, направляющие ползуны и снабженные кулачками исполнительные ползуны. Каждый направляющий и исполнительный ползуны взаимодействуют с соответствующим кронштейном и через суммирующий зубчато-реечный механизм с соответствующим роликом. Средство для крепления деталей выполнено в виде шарнирно установленного на соответствующем кронштейне захватного органа с толкателем. На станине размещены упоры, которые взаимодействуют с толкателями. Захватный орган имеет зубчато-реечный механизм, выполненный с возможностью взаимодействия с кулачком исполнительного ползуна. 8 ил.
Фид.1
AJ. повернуто
f /Sj :,
1- Q 2
Ротор те нологи ескии
ФигЛ
Фив. 5
-ff
3i
31
19
Фиг. 5
и
. Ч ,
Г-Г
Фи2.б
5
820 iS
и./
и./
-иг ли -
L J
| КАРУСЕЛЬНАЯ УСТАНОВКА | 0 |
|
SU369944A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
