Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических гироскопов со сферическим ротором.
Известна система демпфирования гироскопа со сферическим ротором [Гироскопические системы./Под редакцией Д.С. Пельпора. Ч II. М.: Высшая школа, 1988 г., стр.141, рис.5.2д], включающая наружную сферическую поверхность ротора и внутреннюю сферическую поверхность корпуса, поддерживающую жидкость, заполняющую зазор между сферическими поверхностями. Колебания ротора, возникающие в процессе работы гироскопа, демпфируются силами вязкого трения.
Недостатком данной системы демпфирования является ограниченная область применения. Данная система применяется только на гироскопах малой точности.
Известна также система демпфирования сферического ротора электростатического гироскопа [Новые типы гироскопов. П.И. Малеев. Л.: Судостроение, 1971 г., стр.20, рис.15], которую принимаем за прототип.
Система демпфирования ротора электростатического гироскопа содержит источник постоянного тока, две катушки с одинаковыми геометрическими и электрическими параметрами. Катушки установлены на противоположных сторонах корпуса гироскопа в положение, при котором их оси симметрии совпадают с продольной осью корпуса. Конец обмотки первой катушки и конец обмотки второй катушки соединены между собой и с одной из клемм источника. Начало обмотки первой катушки и начало обмотки второй катушки соединены между собой и со второй клеммой источника. При включении источника питания через катушки протекает электрический ток, образуется магнитное поле. Под действием магнитного поля катушек в материале вращающегося ротора образуются вихревые токи, которые являются источником магнитного поля ротора. За счет взаимодействия радиальной составляющей магнитного поля катушек с радиальной составляющей магнитного поля ротора осуществляется демпфирование его нутационных колебаний. За счет взаимодействия осевой составляющей магнитного поля катушек с осевой составляющей магнитного поля ротора (направленной по оси вращения ротора) осуществляется приведение оси вращения ротора к продольной оси корпуса прибора. Для повышения эффективности (уменьшения времени приведения) используют две катушки демпфирования. При этом точность приведения определяется погрешностью выставки оси симметрии одной и второй катушки относительно продольной оси корпуса гироскопа.
Недостатком системы является большое время демпфирования нутационных колебаний ротора гироскопа (большое время готовности гироскопа). Указанный недостаток обусловлен тем, что в результате сложения магнитных полей двух последовательно включенных катушек создаваемый ими магнитный потенциал уменьшается за счет взаимной компенсации части их составляющих. (Магнитный потенциал, создаваемый данной конструкцией, не содержит третьего и четных членов разложения в ряд по сферическим функциям с применением полиномов Лежандра [Г.А. Штамбергер. Устройства для создания слабых постоянных магнитных полей. Новосибирск: Наука, 1972]).
Задачей настоящего изобретения является уменьшение времени демпфирования нутационных колебаний ротора гироскопа при сохранении эффективности (времени, точности) приведения.
Поставленная задача решается тем, что в известной системе демпфирования ротора электростатического гироскопа, содержащей источник тока, две катушки, установленные на противоположных сторонах корпуса гироскопа в положение, при котором их оси симметрии совпадают с продольной осью корпуса, конец обмотки первой катушки и конец обмотки второй катушки соединены между собой и с одной из клемм источника, в цепь источника тока дополнительно введен генератор импульсов и управляемое переключающее устройство (например, реле) с тремя выходами и управляющим входом, первый выход соединен с началом первой катушки, второй выход - с началом второй катушки, третий выход - со второй клеммой источника, управляющий вход переключающего устройства соединен с генератором, вырабатывающим импульсы частотой F, значение которой определяется из соотношения:
где α - действительная часть коэффициента магнитной поляризуемости ротора;
L - модуль вектора момента количества движения ротора;
Н - модуль вектора напряженности магнитного поля;
ρ1 - допускаемое отклонение оси симметрии ротора от оси симметрии первой катушки;
ρ2 - допускаемое отклонение оси симметрии ротора от оси симметрии второй катушки.
Предлагаемое изобретение поясняется чертежами, представленными на фиг.1 и 2.
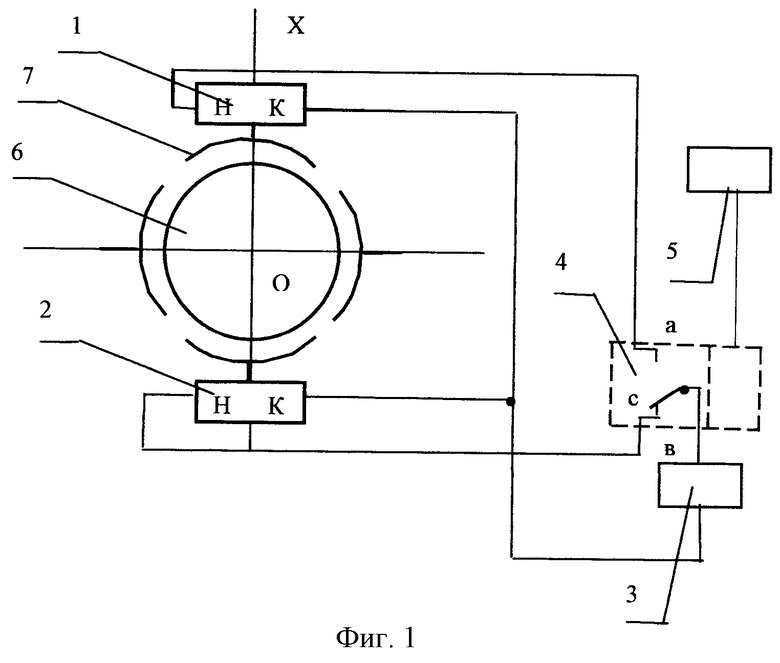
На фиг.1 изображена функциональная схема включения системы демпфирования сферического ротора электростатического гироскопа.
На фиг.2 изображена схема прохождения силовых линий магнитных полей, создаваемых катушками.
На чертежах приняты следующие обозначения:
1 - первая катушка демпфирования,
2 - вторая катушка демпфирования,
3 - источник постоянного тока,
4 - переключающее устройство,
5 - генератор импульсов,
6 - ротор гироскопа,
7 - электроды электростатического подвеса ротора,
8, 9 - магнитные силовые линии катушки 1 и 2,
а, в, с - контакты переключающего устройства,
ОХ1, ОХ2 - оси симметрии катушек,
OX - продольная ось корпуса гироскопа.
Предлагаемое устройство содержит (фиг.1) две одинаковые по электрическим и геометрическим параметрам катушки 1 и 2 демпфирования, источник 3 постоянного тока, переключающее устройство (например, реле) 4, генератор 5 импульсов. Катушки установлены по продольной оси корпуса (не показан) на его противоположных сторонах. Концы катушек 1 и 2 соединены между собой и подключены к одной клемме источника 3 постоянного тока. Начало катушки 1 подключено к контакту "а", начало катушки 2 - к контакту "в" переключающего устройства 4. Вторая клемма источника 3 подключена к контакту "с" переключающего устройства 4. Управляющий вход переключающего устройства 4 соединен с выходом генератора 5.
Работа системы демпфирования осуществляется следующим образом. При включении генератора 5 с помощью контактов "а", "в" и "с" переключающего устройства 4 (реле) происходит поочередное подключение источника 3 постоянного тока к катушкам 1 или 2. При подключении контакта “с” к контакту “а” через катушку 1 протекает электрический ток, образуется магнитное поле, силовые линии 8 которого изображены на фиг.2. Под действием магнитного поля катушки 1 в материале вращающегося ротора 6 образуются вихревые токи, которые являются источником магнитного поля ротора 6. За счет взаимодействия радиальной составляющей магнитного поля катушки 1 с радиальной составляющей магнитного поля ротора 6 осуществляется демпфирование его нутационных колебаний. При этом используются все компоненты магнитного поля катушки 1. За счет взаимодействия осевой составляющей магнитного поля катушки 1 с осевой составляющей магнитного поля ротора 6 (направленной по оси вращения ротора) осуществляется приведение оси вращения ротора 6 в положение, заданное ориентацией оси ОХ1 симметрии катушки 1. При подключении контакта "с" к контакту "в" через катушку 2 протекает электрический ток, образуется магнитное поле, силовые линии 9 которого изображены на фиг.2. Под действием магнитного поля катушки 2 в материале вращающегося ротора 6 образуются вихревые токи, которые являются источником магнитного поля ротора 6. За счет взаимодействия радиальной составляющей магнитного поля катушки 2 с радиальной составляющей магнитного поля ротора 6 осуществляется демпфирование его нутационных колебаний. При этом используются все компоненты магнитного поля катушки 2. За счет взаимодействия осевой составляющей магнитного поля катушки 2 с осевой составляющей магнитного поля ротора 6 (направленной по оси вращения ротора 6) осуществляется приведение оси вращения ротора 6 в положение, заданное ориентацией оси ОХ2 симметрии катушки 2. Для сохранения эффективности (времени приведения и точности) приведения оси вращения ротора в заданное положение переключение с одной катушки на другую осуществляется с частотой, определяемой соотношением:
которое получено после простых преобразований соотношений приведенных в [В.И. Завгородний, Б.Е. Ландау, Ю.Г. Мартыненко. Экспериментальное определение коэффициентов магнитной поляризуемости вращающегося проводящего шара в однородном магнитном поле, 1994, Письма в ЖТФ, том 20, вып.14].
Таким образом, путем исключения взаимной компенсации составляющих магнитного поля катушек 1 и 2, использования всех компонент их магнитного поля (за счет последовательного подключения) время демпфирования ротора гироскопа уменьшается, сохраняется эффективность приведения оси вращения ротора в заданное положение. Поставленная задача решена.
На предприятии ЦНИИ “Электроприбор” предлагаемое техническое решение реализовано. При испытаниях получены положительные результаты. Время демпфирования удалось уменьшить, примерно, в два раза. В настоящее время разрабатывается техническая документация для его применения при производстве электростатических гироскопов со сферическим ротором.
Технико-экономическая эффективность изобретения заключается в уменьшении времени готовности гироскопа, следовательно, и времени готовности систем, в которых применяются такие гироскопы.
В связи с отсутствием сведений о потребностях страны в таких гироскопах экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2208764C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| Способ изготовления чувствительного элемента криогенного гироскопа | 2017 |
|
RU2678707C1 |
| Устройство с магниторезонансным подвесом ротора | 1991 |
|
SU1795284A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических гироскопов со сферическим ротором. Система содержит источник тока, две катушки, установленные на противоположных сторонах корпуса гироскопа в положение, при котором их оси симметрии совпадают с продольной осью корпуса, конец обмотки первой катушки и конец обмотки второй катушки соединены между собой и с одной из клемм источника тока, в цепь которого введены генератор импульсов и управляемое переключающее устройство (например, реле) с тремя выходами и управляющим входом, первый выход соединен с началом первой катушки, второй выход - с началом второй катушки, третий выход - со второй клеммой источника, управляющий вход переключающего устройства соединен с генератором, вырабатывающим импульсы частотой F, значение которой определяется из соотношения:  где α - действительная часть коэффициента магнитной поляризуемости ротора, L - модуль вектора момента количества движения ротора, Н - модуль вектора напряженности магнитного поля, ρ1 - допускаемое отклонение оси симметрии ротора от оси симметрии первой катушки, ρ2 - допускаемое отклонение оси симметрии ротора от оси симметрии второй катушки. Техническим результатом является уменьшение времени демпфирования нутационных колебаний ротора гироскопа при сохранении эффективности (времени, точности) приведения. 2 ил.
где α - действительная часть коэффициента магнитной поляризуемости ротора, L - модуль вектора момента количества движения ротора, Н - модуль вектора напряженности магнитного поля, ρ1 - допускаемое отклонение оси симметрии ротора от оси симметрии первой катушки, ρ2 - допускаемое отклонение оси симметрии ротора от оси симметрии второй катушки. Техническим результатом является уменьшение времени демпфирования нутационных колебаний ротора гироскопа при сохранении эффективности (времени, точности) приведения. 2 ил.
Система демпфирования сферического ротора электростатического гироскопа, содержащая источник тока, две катушки, установленные на противоположных сторонах корпуса гироскопа в положение, при котором их оси симметрии совпадают с продольной осью корпуса, конец обмотки первой катушки и конец обмотки второй катушки соединены между собой и с одной из клемм источника, отличающаяся тем, что в цепь источника тока дополнительно введен генератор импульсов и управляемое переключающее устройство с тремя выходами и управляющим входом, первый выход соединен с началом первой катушки, второй выход с началом второй катушки, третий выход со второй клеммой источника, управляющий вход переключающего устройства соединен с генератором, вырабатывающим импульсы частотой F, значение которой определяется из соотношения
где α - действительная часть коэффициента магнитной поляризуемости ротора;
L - модуль вектора момента количества движения ротора;
Н - модуль вектора напряженности магнитного поля;
ρ1 - допускаемое отклонение оси симметрии ротора от оси симметрии первой катушки;
ρ2 - допускаемое отклонение оси симметрии ротора от оси симметрии второй катушки.
| МАЛЕЕВ П.И | |||
| Новые типы гироскопов | |||
| - Л.: Судостроение, 1971, с.20, рис.15 | |||
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| US 4076998 А, 28.02.1978 | |||
| US 5035376 А, 30.07.1991 | |||
| GB 987921 А, 31.03.1965. | |||

