Изобретение относится к системам управления подвижными объектами, а именно к системам ориентации летательных аппаратов.
Известно устройство определения углового положения летательного аппарата по магнитному полю Земли, содержащее блок магнитометров и блок вычисления углов курса и тангажа, блоки определения долготы, широты и высоты, вычислитель составляющих вектора индукции магнитного поля Земли, первый, второй и третий входы которого связаны с выходами блоков определения долготы, широты и высоты, а также синхронизатор.
Недостатком указанного устройства является его невысокая точность.
Цель - повышение точности.
В устройство введены первый и второй блоки коммутации, первый и второй регистры и блок пересчета составляющих вектора индукции магнитного поля Земли, причем первый, второй, третий и четвертый входы первого блока коммутации связаны соответственно с первым, вторым и третьим выходами вычислителя составляющих вектора индукции магнитного поля Земли, а также с первым входом синхронизатора, первый и второй входы второго блока коммутации связаны соответственно с первым выходом блока магнитометров и с выходом синхронизатора, первый, второй, третий и четвертый управляющие входы первого регистра связаны соответственно с первым, вторым и третьим выходами блока вычисления составляющих вектора индукции магнитного поля Земли и вторым входом синхронизатора, первый, второй, третий и четвертый входы второго регистра связаны соответственно с первым, вторым, третьим выходами блока вычисления составляющих вектора индукции магнитного поля Земли и с вторым выходом синхронизатора, пятые входы первого и второго регистров связаны с первым выходом синхронизатора, первый, второй, третий, четвертый и пятый входы вычислителя составляющих вектора индукции магнитного поля Земли связаны соответственно с первым и вторым выходами второго регистра, с вторым выходом синхронизатора, а первый, второй, третий и четвертый выходы - соответственно с первым, вторым, третьим и четвертым входами блока вычисления углов курса и тангажа летательного аппарата, пятый, шестой, седьмой, восьмой, девятый и десятый входы которого связаны соответственно с первым, вторым, третьим выходами первого блока коммутации, выходом второго блока коммутации, третьими выходами первого и второго регистров.
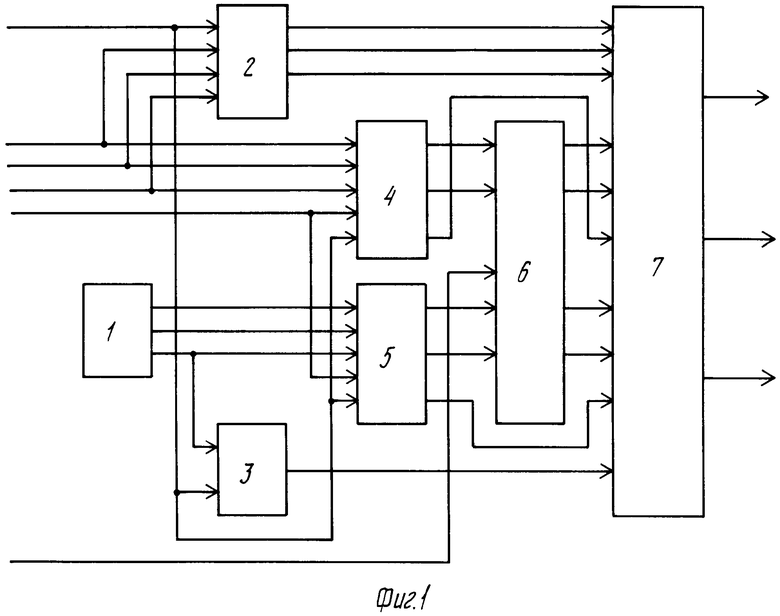
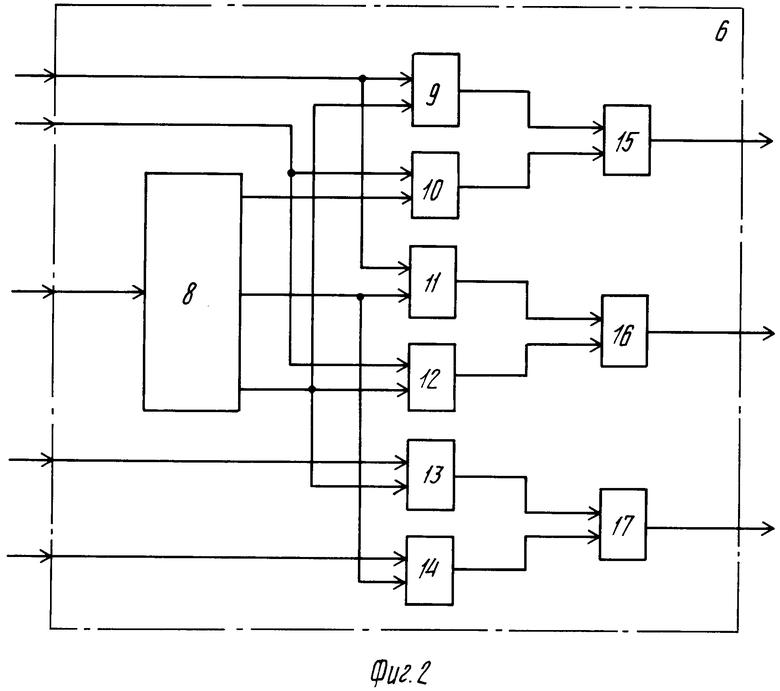
На фиг. 1 представлена структурная схема предложенного устройства; на фиг.2 - блок пересчета составляющих вектора индукции магнитного поля Земли, где 1 - блок магнитометров; 2,3 блоки коммутации; 4,5 - регистры; 6 - блок пересчета составляющих вектора индукции магнитного поля Земли; 7 - блок вычисления углов Ψ, ϕ и ν ; 8 - синусно-косинусный преобразователь; 9-14 - блоки умножения; 15,16,17 - сумматоры.
Устройство работает следующим образом.
После начального успокоения ЛА в фиксированный момент времени производится измерение составляющих вектора индукции МПЗ в связанной системе координат с помощью блока 1 магнитометров. Одновременно с блока определения долготы, широты и высоты (не показан) на второй, третий, четвертый входы устройства поступают вычисленные по известным значениям λ,ϕ и h составляющие вектора индукции в базовой системе координат, сопровождаемые первым синхроимпульсом, подаваемым на пятый вход устройства, т.е. на четвертые входы первого 4 и второго 5 регистров. Значения долготы λ, широты ϕг и высоты h, т. е. координат центра масс ЛА, определяются с помощью системы навигации ЛА [1]. По первому синхроимпульсу измеренные значения вектора индукции МПЗ запоминаются во втором регистре 5, а вычисленные значения - на первом регистре 4, где и хранятся весь промежуток времени между измерениями. В точке измерения О2 вычисленные значения вектора индукции, сопровождаемые вторым синхроимпульсом, через первый блок 2 коммутации поступают на входы блока 7. По второму синхроимпульсу измеренная составляющая Тсз/1/ = Tсз/2/ через второй блока 3 коммутации поступает также на вход блока 7, а информация из регистров 4 и 5 выдается на входы блока 6 на преобразователь 8, на который от вычислителя (седьмой вход устройства) подается значение угла γ . После пересчета составляющих из точки О1 в точку О2 с выхода блока 6 пересчитанные составляющие также подаются на входы блока 7, на выходе которого получают значения угловых параметров ν,Ψ и ϕ ЛА.
Проведенное моделирование показало, что при использовании серийного магнитометра и угловом расстоянии между точками О1 и О2 в 30о ошибки измерения угловых параметров ЛА с помощью предлагаемого устройства составляет 0,1-0,2 градуса, что на порядок превышает точность аналога. При этом время определения углового положения составляет менее 1 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля параметров углового движения космического аппарата по данным бортовых измерений состояния геомагнитного поля | 2018 |
|
RU2692741C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1998 |
|
RU2156440C2 |
Изобретение относится к системам управления подвижными объектами, а именно к системам ориентации летательных аппаратов. В устройство определения углового положения летательного аппарата по магнитному полю Земли, содержащее блок магнитометров, блок вычисления углов курса и тангенса, блок определения долготы, широты и высоты, вычислитель составляющих вектора индукции магнитного поля Земли, а также синхронизатор, с целью повышения точности введены первый и второй блоки коммутации, первый и второй регистры и блок пересчета составляющих вектора магнитного поля Земли. 2 ил.
УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО МАГНИТНОМУ ПОЛЮ ЗЕМЛИ, содержащее блок магнитометров и блок вычисления углов курса и тангажа, блоки определения долготы, широты и высоты, вычислитель составляющих вектора индукции магнитного поля Земли, первый, второй и третий входы которого связаны с выходами блоков определения долготы, широты и высоты, и синхронизатор, отличающееся тем, что, с целью повышения точности, в него введены первый и второй блоки коммутации, первый и второй регистры и вычислитель составляющих вектора индукции магнитного поля Земли, причем первый, второй, третий и четвертый управляющий входы первого блока коммутации связаны соответственно с первым, вторым и третьим выходами вычислителя составляющих вектора индукции магнитного поля Земли, а также с первым выходом синхронизатора, первый вход и второй управляющий вход второго блока коммутации связаны соответственно с первым выходом блока магнитометров и с первым выходом синхронизатора, первый, второй, третий и четвертый входы первого регистра связаны соответственно с первым, вторым и третьим выходами блока вычисления составляющих вектора индукции магнитного поля Земли и с вторым выходом синхронизатора, первый, второй, третий и четвертый входы второго регистра связаны соответственно с первым, вторым, третьим выходами вычислителя составляющих вектора индукции магнитного поля Земли и с вторым выходом синхронизатора, пятые входы первого и второго регистров связаны с вторым выходом синхронизатора, первый, второй, третий, четвертый и пятый входы блока вычислителя составляющих вектора индукции магнитного поля Земли связаны соответственно с первым и вторым выходами первого регистра, с первым и вторым выходами второго регистра, с первым выходом синхронизатора, а первый, второй, третий и четвертый выходы - соответственно с первым, вторым, третьим и четвертым входами блока вычисления углов курса и тангажа летательного аппарата, пятый, шестой, седьмой, восьмой, девятый и десятый входы которого связаны соответственно с первым, вторым, третьим выходами первого блока коммутации, выходом второго блока коммутации, третьими выходами первого и второго регистров.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коваленко А.П | |||
| Магнитные системы управления космическими летательными аппаратами | |||
| М.: Машиностроение, 1975, с.124-160. | |||
