Изобретение относится к области авиационного приборостроения и может быть реализовано в навигационных системах, использующих информацию от радиосистем с зашумленным сигналом, в частности от спутниковой радионавигационной системы.
Известны устройства обработки сигналов [1], использующие информацию системы счисления пути и радио корректоров типа радиосистемы ближней навигации (РСБН VOR/DME), - радиолокационной станции (РЛС) - для комплексной обработки с помощью фильтра Калмана либо с помощью фильтра с ограниченно растущей памятью.
Наиболее близким к предлагаемому устройству является устройство обработки сигналов, описанное О.А.Степановым [2], которое содержит 1-й и 2-й измерители (датчика первичной информации, один из которых является корректором другого), фильтр и информационные связи. Известное устройство работает следующим образом: на основе разностных измерений от датчиков первичной информации решается задача фильтрации ошибок одного измерителя на фоне другого измерителя; выходной сигнал компенсируется с помощью отфильтрованной ошибки. При работе такого устройства не анализируется качество сигналов датчика первичной информации, выступающего в роли корректора, в частности, спутниковой навигационной системы (СНС). В этом случае на выходе фильтра могу присутствовать аномальные сигналы типа выбросов, сглаженные только частично.
Кроме того, второй датчик первичной информации (СНС) используется только в качестве корректора и при отказе первого датчика его информация не используется в качестве выходной.
Цель предлагаемого изобретения: создание устройства обработки информации, обеспечивающего
- обнаружение аномальных измерений в сигнале корректора и исключение их из дальнейшей обработки;
- повышение показателя полноты системы контроля корректора за счет введения дополнительного контроля, основанного на стастистической обработке сигналов корректора;
- увеличение числа навигационных режимов, отличающихся по качеству сигнала и точности, способных выполнять заданную целевую задачу, что обеспечивает функциональную информационную избыточность без применения дополнительных корректоров;
- повышение целостности навигационной информации.
Поставленная цель достигается введением в известное устройство дополнительных элементов и новых связей.
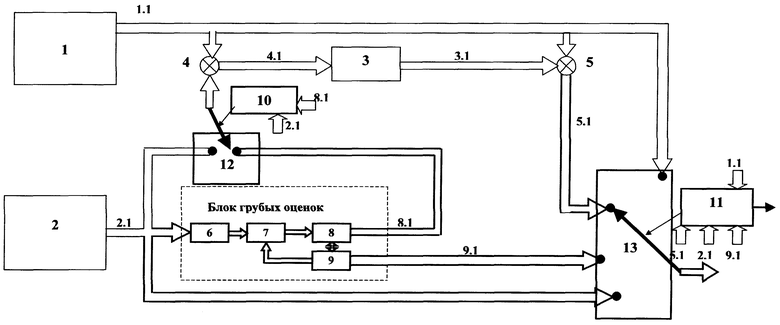
На фиг.1 приведена блок-схема предлагаемого устройства, где:
1 - датчик первичной информации - система счисления пути;
2 - корректор - СНС;
3 - фильтр;.
4, 5 - сумматоры;
6 - блок запоминающих устройств;
7 - 1-й вычислительный блок;
8 - блок обнаружения аномальных сигналов и времени их появления;
9 - 2-й вычислительный блок;
10, 11 - блоки контроля (дешифраторы);
12, 13 - коммутаторы;
1.1, 2.1, 3.1, 4.1, 5.1, 8.1, 9.1 - информационные шины, передающие параметры и их признаки достоверности;
Так же как и известное, предлагаемое устройство обработки сигналов содержит датчик первичной информации (1), корректор (2) и фильтр (3), подмоченный в свою очередь через первый сумматор (4) к датчику первичной информации (1) и ко второму сумматору (5), связанному также с датчиком первичной информации (1).
Кроме того, предлагаемое устройство содержит последовательно соединенные блок запоминающих устройств (6), связанный с корректором (2), 1-й вычислительный блок (7) и блок обнаружения аномальных сигналов и времени их появления (8), связанный в свою очередь через второй вычислительный блок (9) с первым вычислительным блоком (7), а также два блока контроля (10, 11), входами связанные соответственно с корректром (2) и блоком обнаружения аномальных сигналов (8), а также с блоками 1, 5, 9, а выходами - с управляющими входами вновь введенных коммутаторов (12, 13) соответственно.
При этом входы первого коммутатора (12) связаны со входами корректра (2) и блока обнаружения аномальных сигналов (8) а выход - с первым сумматором (4), а входы второго коммутатора связаны соответственно с датчиком первичной информации (1), вторым сумматором (5), вторым вычислительным блоком (9) и корректром (2).
Так же как в известном устройстве
- датчик первичной информации (1) формирует параметры:
ϕ сч, λ сч, V
- информационная шина 1.1 передает параметры системы счисления пути:
ϕ сч, Испр ϕ сч, λ сч, Испр λ сч, V
- корректор (2), формирует параметры:
ϕ к, λ к, V
- информационная шина 2.1 передает параметры корректора:
ϕ к, Испр ϕ к, λ к, Испр λ к, V
- фильтр (3) формирует оценки ошибок координат и составляющих путевой скорости, получаемые при использовании сигналов корректора, прошедших контроль в блоке грубых оценок или без него;

- информационная шина 3.1 передает оценки ошибок координат и составляющих путевой скорости и их признаки исправности.
- информационная шина 4.1 передает ошибки координат и составляющих путевой скорости, являющихся разницей параметров, измеренных блоками 1 и 2.
Функционально вновь вводимые элементы 6-9 можно объединить в блок грубых оценок.
В “Блоке грубых оценок” с помощью статистической обработки сигналов на некотором скользящем интервале времени
1) выявляются аномальные сигналы;
2) контролируются величина и частота их появления;
3) устанавливется время появления аномальных сигналов;
4) проводится исключение аномальных сигналов из дальнейшей обработки;
5) проводится сглаживание сигналя корректора методом наименьших квадратов (МНК)[4];
6) формируются признаки “Непригодности”.
Формульно-логаческое описание элементов, входящих в блок грубых оценок.
Для каждого обрабатываемого параметра корректора (ϕ к, λ к, V
блок запоминающих устройств (6) - для запоминания выборки измеренных сигналов (ϕ к, λ к, V
- таймера (счетчика) определения интервала обработки
Т - счетчик времени наблюдения;
Тзад - заданное значение времени наблюдения (длина интервала наблюдения);
k - число обновляемых значений сигнала (для первого интервала к=Тзад).
- запоминающего устройства выборки сигнала на интервале:
XZ[i]:=X(t), Z=1,2,3,4 где 1=ϕ , 2=λ , 3=VE, 4=VN, i=1,... ,n, где n - количество измерений на интервале обработки. XZ (t) - текущее значение сигнала. XZ[i] -элемент массива запомненных значений сигнала;
Первый вычислительный блок (7) для расчета функций эталона и отклонения измеренного параметра или их аппроксимаций от эталонов, 1-й вычислительный блок (7) может быть реализован с помощью
- устройства вычисления функций эталона YZ [i] по выборке
 где
где  - скорость изменения измеренного навигационного параметра в момент времени ti;
- скорость изменения измеренного навигационного параметра в момент времени ti;
- устройства расчета отклонений Δ ХZкорр (погрешностей) вектора ХZкорр на каждом j-м интервале

Блок для обнаружения аномальных сигналов и времени их появлений (8) может быть реализован с помощью
- устройства расчета математических ожиданий и дисперсий для функции отклонений 
 - среднее значение функции
- среднее значение функции  ; на участке наблюдения;
; на участке наблюдения;
 - дисперсия функции отклонений
- дисперсия функции отклонений  на участке наблюдения
на участке наблюдения
- устройства ввода и хранения пограничного значения показателя значимости - θ погр, взятого из таблиц для n степеней свободы и заданной вероятности Q ложного отказа;
- устройства расчета показателя значимости θ j между двумя интервалами обработки

где  - значения дисперсий функции на соседних участках обработки, показатель θ j характеризует отношение большей дисперсии к меньшей;
- значения дисперсий функции на соседних участках обработки, показатель θ j характеризует отношение большей дисперсии к меньшей;
- устройства сравнения показателя достоверности с его пограничным значением, позволяющее обнаружить аномальные сигналы и момент их появления

Основные технические принципы решения, использованные при реализации блока грубых оценок (6, 7, 8 и 9), и его применение для обнаружения недопустимых отклонений в дискретных измерениях изложены в [3], метод МНК приведен в [4], но их применение в предлагаемом устройстве для обнаружения аномальных измерений и дополнительной фильтрации сигнала корректора позволили получить новые качества выходного сигнала предлагаемого устройства.
Блок расчета сглаживающей функции (9) предназначен для расчета сглаживающей функции сигнала корректора, методом наименьших квадратов и формирования сигналов непригодности может быть реализован с помощью
- устройства для расчета функции аппроксимации сигнала корректора с использованием метода наименьших квадратов на основе математических ожиданий и дисперсий [4],
- устройства корректировки аномального сигнала 
 - скорректированный сигнал;
- скорректированный сигнал;
- устройства формирования признака непригодности сигнала, учитывающего величину и частоту появления аномалии

где σ доп допустимое значение среднеквадратического отклонения,
ω j, ω доп - частота появления аномального сигнала и его допустимое значение.
Информационная шина 8.1, передающая информацию ϕ
Информационная шина 9.1, передающая информацию ϕ
Неприг. ϕ
ϕ
Испр ϕ
Вновь введенные блоки (10, 11) контроля функционально представляют собой дешифраторы, которые могут быть реализованы с помощью известных устройств (например, реле или транзисторы).
Первый блок контроля (10), осуществляет выбор и переключение шин 2.1 и 8.1. на основе анализа признаков Испр ϕ к, Испр λ к, Испр V
Во втором вновь введенном блоке контроля (11) производится выбор и переключение информационных режимов с учетом их точности. Переключение информации осуществляется по мере снижения ее точности на основе логического анализа признаков исправностей параметров
(Испр ϕсч, Испр λсч, Испр V
(Испр ϕ
 и
и 
Информационная шина (5.1), передает оцененные параметры  и признаки
и признаки 
В текте приняты следующие обозначения:
Неприг. ϕ
ϕ
Испр ϕ
 оценки ошибок координат и составляющих скорости, получаемые при использовании сигналов корректора, прошедших контроль в блоке грубых оценок или без него;
оценки ошибок координат и составляющих скорости, получаемые при использовании сигналов корректора, прошедших контроль в блоке грубых оценок или без него;
оценки координат и составляющих скорости, получаемые при использовании сигналов корректора, прошедших контроль в блоке грубых оценок или без него;
 - оцененные выходные параметры устройства - широта, долгота, восточная и северная составляющие скорости;
- оцененные выходные параметры устройства - широта, долгота, восточная и северная составляющие скорости;
 - признаки достоверности выходных параметров, формируемых на основе признаков исправности используемых сигналов;
- признаки достоверности выходных параметров, формируемых на основе признаков исправности используемых сигналов;
Приз. Отказ устройства - признак отказа устройства обработки сигналов. Предлагаемое устройство работает следующим образом:
на сумматор 4 подается сигнал корректора, прошедший дополнительный контроль в блоках 6, 7, 8, 9, а в случае невозможности его использования
 , осуществляется переход на связь, предусмотренную в прототипе, фильтр отрабатывает погрешность, получаемую как разницу измерений системы счисления пути и корректора; одновременно в блоке 4 сигнал корректора пропускается через статистический фильтр, построенный с использованием МНК, и формирует признаки (Испр ϕ
, осуществляется переход на связь, предусмотренную в прототипе, фильтр отрабатывает погрешность, получаемую как разницу измерений системы счисления пути и корректора; одновременно в блоке 4 сигнал корректора пропускается через статистический фильтр, построенный с использованием МНК, и формирует признаки (Испр ϕ
Таким образом, использование предлагаемого устройства позволит обеспечить
- получение качественно нового сигнал корректора за счет обнаружения и исключения аномальных измерений.
- повышение точности навигационной информации, формируемой устройством, за счет дополнительного контроля сигналов корректора;
- повышение целостности навигационной информации, формируемой устройством, за счет функционального резервирования навигационных режимов.
Работоспособность предлагаемого устройства была подтверждена результатами математического моделирования с использованием реальных данных датчика (БИНС) и корректора (СНС).
Результаты подтвердили получение положительного эффекта. В настоящее время ведутся работы по внедрению данного устройства в состав бортового программного обеспечения вычислительных систем ПрНК для самолета Ан-70, БИНС-СП для самолета 10КУБ и базовой навигационной системы (БНС) для самолетов ДА и ВТА.
Источники информации
1. Авиационные приборы и навигационные системы. Под ред. О.А.Бабича, М., изд. ВВИА им. Н.Е.Жуковского, 1981, стр.565.
2. О.А.Степанов. Особенности построения и перспективы развития навигационных инерциально-спутниковых систем. Санкт-Петербург, Сборник статей и докладов “Интегрированные инерциально-спутниковые системы навигации”. Под ред. В.Г.Пешехонова, 2001, стр.39.
3. А.М. Длин. Математическая статистика в технике, М., изд. Советская наука, 1958, стр.465.
4. Г. Крамер Математическая статистика, М., изд. Мир, 1976, стр.453.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2659755C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2660383C1 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| СПОСОБ ПОДГОТОВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ К ПОЛЕТУ | 2013 |
|
RU2529757C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
Устройство обработки сигналов относится к области авиационного приборостроения и может быть применено в навигационных системах, использующих информацию с зашумленным сигналом, например, от спутниковых навигационных систем. Устройство обработки сигналов содержит датчик первичной информации, корректор и фильтр, связанный через сумматор с датчиком первичной информации, подключенным ко второму сумматору, связанному в свою очередь с фильтром. Кроме того, в него дополнительно введены последовательно соединенные блок запоминающих устройств, связанный с корректором, первый вычислительный блок и блок обнаружения аномальных сигналов и времени их появления, а также второй вычислительный блок, два блока контроля, два коммутатора и новые связи. Достигаемым техническим результатом является повышение целостности навигационной информации. 1 ил.
Устройство обработки сигналов, содержащее датчик первичной информации, корректор и фильтр, подключенный через первый сумматор к датчику первичной информации, связанного, в свою очередь, со вторым сумматором, подключенным к фильтру, отличающееся тем, что в него дополнительно введены последовательно соединенные блок запоминающих устройств, связанный с корректором, первый вычислительный блок и блок обнаружения аномальных сигналов и времени их появления, связанный, в свою очередь, через вновь введенный второй вычислительный блок с первым вычислительным блоком, а также два блока контроля, связанных с управляющими входами двух вновь введенных коммутаторов соответственно, при этом входы первых блока контроля и коммутатора подключены соответственно к корректору и блоку обнаружения аномальных сигналов, выход первого коммутатора связан с первым сумматором, а входы вторых блока контроля и коммутатора подключены соответственно к датчику первичной информации, корректору, второму сумматору и второму вычислительному блоку.
| СТЕПАНОВ О.А | |||
| Особенности построения и перспективы развития навигационных инерциально-спутниковых систем | |||
| Сборник статей и докладов | |||
| Интегрированные инерциально-спутниковые системы навигации | |||
| Под ред | |||
| ПОШЕХОНОВА В.Г | |||
| Санкт-Петербург, 2000, с.39 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| US 5740048 А, 14.04.1998 | |||
| Способ когезионного упрочнения битума | 2020 |
|
RU2781584C2 |
| EP 0803787 А1, 29.10.1997. | |||

