Изобретение относится к области авиационного приборостроения и может быть применено в интегрированных системах, использующих информацию с зашумленным сигналом, в частности от спутниковой навигационной системы (СНС), и обеспечивающих целостность навигационной информации системы.
Известны устройства обработки сигналов [1], использующие информацию системы счисления пути и корректора типа радиосистемы ближней навигации либо СНС для комплексной обработки сигналов с помощью фильтра Калмана.
Наиболее близким к предлагаемому, является устройство [2], содержащее систему счисления пути, корректор, например бортовой измеритель спутниковой навигационной системы, фильтр, два сумматора и коммутационные связи.
В известном устройстве выходной сигнал сохраняет достоинства и в значительной степени снижается влияние недостатков каждого из измерителей. Каждый измеритель характеризуется диапазоном применения, который обеспечивает нахождение воздушного судна (ВС) в заданном пространстве (в частности - эшелоне, коридоре). Бортовой измеритель СНС имеет выходной сигнал, содержащий случайные выбросы и шумовую составляющую, что приводит к большому градиенту изменения оцененных параметров местоположения и скоростей ВС. Недостатки известного устройства заключаются в определении позиционной и скоростной информации, имеющей большой градиент изменения, что не позволяет решать специальные задачи вертолето- и самолетовождения, например, «висение» вертолета или групповой полет самолетов.
Цель предлагаемого изобретения - создание устройства обработки сигналов, обеспечивающего выполнение специальных режимов: групповой полет самолета, «висение» вертолета, а также полетов в условиях «узких» коридоров (при заданном уровне точности менее 1 морской мили (м.м.)).
Техническим результатом является уменьшение градиента изменения навигационных параметров и повышение уровня точности оцениваемых параметров местоположения и скоростей воздушного судна.
Технический результат достигается устройством обработки сигналов, содержащим систему счисления пути, корректор, фильтр Калмана, первый и второй сумматоры, при этом один из выходов системы счисления пути соединен с первым входом блока контроля первичной информации, подключенного первым выходом к первым входам первого и второго сумматоров, при этом вторым входом первый сумматор соединен с выходом корректора, а выходом связан через фильтр Калмана со вторым входом второго сумматора, при этом согласно изобретению, в него дополнительно введены задатчик, а также четыре сумматора и пять блоков вычислительных устройств, часть из которых образуют блок коррекции, при этом блок контроля первичной информации дополнительно подключен первым выходом к первым входам третьего и шестого сумматоров, связанных между собой через блок коррекции, включающий последовательно соединенные первый блок вычислительных устройств, входом соединенный с выходом третьего сумматора, четвертый сумматор, второй блок вычислительных устройств, пятый сумматор, а также третий блок вычислительных устройств, который в свою очередь подключен ко второму входу шестого сумматора, при этом, блок коррекции также включает последовательно соединенные четвертый блок вычислительных устройств, подключенный входом к выходу пятого сумматора, пятый блок вычислительных устройств, подключенный выходом ко второму входу пятого сумматора, а также шестой блок вычислительных устройств, соединенный выходом со вторым входом четвертого сумматора.
Вновь введенные элементы и новые связи функционально представляют собой формирователь поправок навигационных координат и скоростей.
При построении новых элементов использовались математический аппарат оптимальной фильтрации и математической статистики. Погрешность спутникового сигнала имеет сложный характер, и ее можно представить состоящей из нескольких случайных процессов [4]: длиннопериодической случайной составляющей, короткопериодической случайной составляющей, «белого шума» и выбросов. Поэтому после использования традиционного фильтра, который отфильтрует аномальные сигналы и «белый шум», и позволяет получить ошибку оценки погрешности инерциальной системы, на уровне короткопериодической коррелированной составляющей погрешности СНС, включить блок коррекции местоположения ВС по данным системы счисления пути и устройства обработки сигнала, который позволит исключить из оценки короткопериодическую составляющую, и получить выходные навигационные параметры с минимальным градиентом изменения координат и скорости.
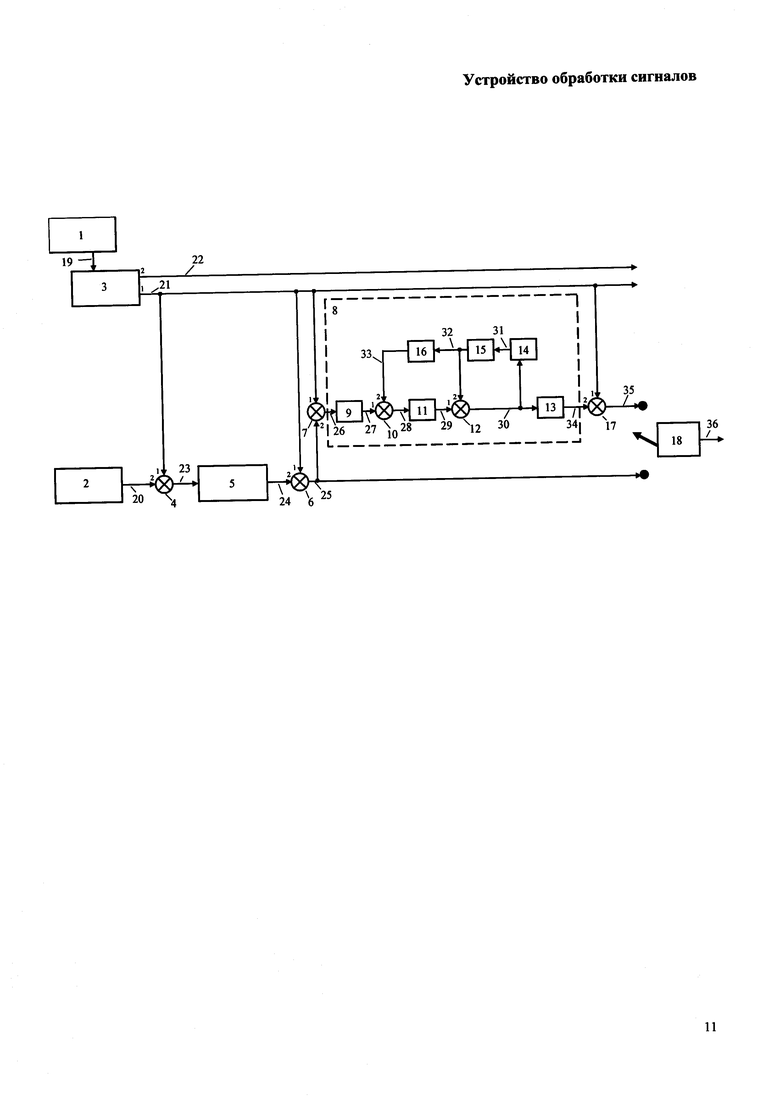
На чертеже приведена блок-схема предложенного устройства обработки сигналов, где:
1 - система счисления пути;
2 - корректор;
3 - блок контроля первичной информации;
4 - первый сумматор;
5 - фильтр Калмана;
6 - второй сумматор;
7 - третий сумматор;
8 - блок коррекции, включающий:
9 - первый блок вычислительных устройств;
10 - четвертый сумматор;
11 - второй блок вычислительных устройств;
12 - пятый сумматор;
13 - третий блок вычислительных устройств;
14 - четвертый блок вычислительных устройств;
15 - пятый блок вычислительных устройств;
16 - шестой блок вычислительных устройств;
17 - шестой сумматор;
18 - задатчик;
19-36 - информационные шины для передачи управляющих сигналов.
Предложенное устройство обработки сигналов содержит систему счисления пути (датчик первичной информации) (1), выход которой посредством информационной шины (19) соединен с первым входом блока контроля первичной информации (3), подключенного, в свою очередь, первым выходом через соответствующие разветвления информационной шины (21) к первым входам первого (4), второго (6), третьего (7) и шестого (17) сумматоров. Вторым входом первый сумматор с помощью шины (20) соединен с выходом корректора (2), а выходом связан через фильтр Калмана (5) со вторым входом второго сумматора (6) посредством шин (23) и (24), который, в свою очередь, выходом через шину (25) подключен ко второму входу третьего сумматора (7). При этом второй (6) и шестой (17) сумматоры связаны выходами по соответствующим шинам (25) и (34) с первым и вторым входами задатчика (18). Сумматоры (7) и (17) связаны между собой через блок коррекции (8). Блок коррекции (8) содержит последовательно соединенные шинами (26)-(30) первый блок вычислительных устройств (9), входом соединенный посредством шины (26) с выходом третьего сумматора (7), четвертый сумматор (10), второй блок вычислительных устройств (11), пятый сумматор (12), а также третий блок вычислительных устройств (13), который в свою очередь подключен к шестому сумматору (17) через шину (34). Кроме того, блок коррекции (8) также включает последовательно соединенные шинами (30) и (31) четвертый блок вычислительных устройств (14), подключенный входом через соответствующее разветвление шины (30) к выходу пятого сумматора (12), пятый (15) блок вычислительных устройств, подключенный выходом через соответствующее разветвление шины (32) ко второму входу пятого сумматора (12), а также шестой блок вычислительных устройств (16), соединенный выходом через шину (33) со вторым входом четвертого сумматора (10).
В предложенное устройство вновь введены:
- сумматор (7) для формирования разницы между координатами и скоростями (ΔϕII, ΔλII ΔVEII, ΔVNII), выдаваемыми блоком контроля и выходными оцененными параметрами фильтра;
- блок вычислительных устройств (9) для пересчета разницы координат (ΔϕII, ΔλII) и разницы скорости (ΔVEII, ΔVNII), получаемых из третьего сумматора в позиционные и скоростные измерения ( ) в платформенной системе;
) в платформенной системе;
- сумматор (10) - сумматор, формирующий позиционные и скоростные невязки ( ) на каждом шаге как разницу между позиционными и скоростными измерениями (Z) и априорной разницей (
) на каждом шаге как разницу между позиционными и скоростными измерениями (Z) и априорной разницей ( ), полученной в шестом блоке вычислительных устройств;
), полученной в шестом блоке вычислительных устройств;
- блок вычислительных устройств (11) - для расчета
1) коэффициентов усиления фильтра второй ступени



где  - матрица системы, представляющая собой математическую модель погрешностей системы счисления пути, в нашем случае математическую модель погрешностей БИНС;
- матрица системы, представляющая собой математическую модель погрешностей системы счисления пути, в нашем случае математическую модель погрешностей БИНС;
HII - матрица измерений;
ГQГII - неотрицательно определенная матрица шумов системы;
 - априорная матрица ошибок оценивания;
- априорная матрица ошибок оценивания;
PIIK - апостериорная матрица ошибок оценивания;
RIIK - неотрицательно определенная матрица шумов измерений;
матрицы , HII, ГQГII - аналогичны соответствующим матрицам первой ступени фильтра; RIIK - настроена на сглаживание короткопериодической случайной составляющей погрешностей навигационных параметров СНС;
2) апостериорных разниц, учитывающих соответствующие коэффициенты усиления

- сумматор (12) для формирования оптимальной оценки вектора состояния ( ) как суммы априорной оценки вектора состояния (
) как суммы априорной оценки вектора состояния ( ) и вектора апостериорной разницы (
) и вектора апостериорной разницы ( );
);
- блок вычислительных устройств (13) - для расчета априорной разницы
 ,
,
где  - априорная оценка вектора состояния;
- априорная оценка вектора состояния;
- блок вычислительных устройств (14) - для расчета априорной оценки вектора состояния
 ,
,
где  - оптимальная оценка вектора состояния, сохраненная на предыдущем шаге в блоке (8.7);
- оптимальная оценка вектора состояния, сохраненная на предыдущем шаге в блоке (8.7);
- блок вычислительных устройств (15) - для пересчета оптимальной оценки из платформенной системы, в которой рассчитан вектор состояния, в географическую систему ( ,
,  ,
,  ,
,  );
);
- блок вычислительных устройств (16)
- для запоминания оптимальной апостериорной оценки вектора состояния ( ) на предыдущем шаге,
) на предыдущем шаге,
- для инициализации на первом шаге вычислений формируются начальные значения вектора состояния ( );
);
- сумматор (17) для формирования оцененных значений широты, долготы, северной и восточной составляющих скорости по результатам работы блока коррекции ( ,
,  ,
,  ,
,  );
);
- задатчик (18) - предназначен для формирования выходного сигнала устройства в зависимости от заданного извне навигационного специального режима:
- «висение» вертолета;
- групповой полет самолетов;
- режима повышенной точности;
- нет специальных режимов.
Устройство обработки сигналов работает следующим образом:
- система счисления пути (1) формирует параметры: координаты (широту, долготу) ϕсч, λсч, составляющие (восточную и северную) путевой скорости VEсч, VNсч и их признаки исправности: Испр ϕсч, Испр λсч, Испр VEСЧ, Испр VNСЧ;
- информационная шина (19) передает параметры системы счисления пути: ϕсч, Испр ϕсч, λсч, Испр λсч, VEСЧ, Испр VEСЧ, VNСЧ, Испр VNСЧ;
- корректор (2) формирует параметры: ϕк, λк, VEК, VNК - координаты (широту, долготу) и составляющие (восточную и северную) путевой скорости и их признаки исправности: Испр ϕСНС, Испр λСНС, Испр VECHC, Испр VNСНС;
- информационная шина (20) передает параметры корректора (2): ϕСНС, Испр ϕСНС, λСНС, Испр λСНС, VEСНС, Испр VEСНС, VNСНС, Испр VNСНС;
- информационная шина (21) передает параметры системы счисления пути: ϕсч, Испр ϕсч, λсч, Испр λсч, VEСЧ, Испр VEСЧ, VNСЧ, Испр VNСЧ;
- информационная шина (22) передает признак «Отказ Устр.» на выход;
- в сумматоре (4) вычисляется разница одноименных сигналов системы счисления пути, поступающих по шине (21) и корректора СНС (2): Δϕ, Δλ, ΔVE, ΔVN,
- информационная шина (23) передает разницу одноименных сигналов Δϕ, Δλ, ΔVE, ΔVN;
- фильтр (5) формирует оценки ошибок координат и составляющих путевой скорости и их признаки достоверности:  , Дост.
, Дост.  ,
,  , Дост.
, Дост.  ,
,  , Дост.
, Дост.  ,
,  , Дост.
, Дост.  ;
;
- информационная шина (24) передает информацию фильтра об оценках ошибок координат и составляющих путевой скорости и их признаки достоверности  , Дост.
, Дост.  ,
,  , Дост.
, Дост.  ,
,  , Дост.
, Дост.  ,
,  , Дост.
, Дост.  ;
;
- сумматор (6) формирует оцененные параметры координат и составляющих путевой скорости:  ,
,  ,
,  ,
,  и признаки их достоверности Дост
и признаки их достоверности Дост  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  ;
;
- информационная шина (25) передает оцененные параметры координат и составляющих путевой скорости:  ,
,  ,
,  ,
,  и признаки их достоверности Дост
и признаки их достоверности Дост  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  на задатчик (18) и сумматор (7);
на задатчик (18) и сумматор (7);
- в сумматоре (7) вычисляется разница одноименных сигналов системы счисления пути, поступающих по шине (21) и оцененных параметров координат и составляющих путевой скорости - шина (25): ΔϕII, ΔλII, ΔVEII, ΔVNII;
- информационная шина (26) передает разницу одноименных сигналов системы счисления пути и оцененных параметров координат и составляющих путевой скорости: ΔϕII, ΔλII, ΔVEII, ΔVNII;
- блок вычислительных устройств (9) осуществляет пересчет параметров (ΔϕII, ΔλII, ΔVEII, ΔVNII) из географической системы координат в платформенную, формируя вектор измерений ( );
);
- информационная шина (27) передает вектор измерений ( );
);
- в сумматоре (10) вычисляется вектор позиционных и скоростных невязок () как разницу вектора z и вектора априорной разницы ( );
);
- информационная шина (28) передает вектор позиционных и скоростных невязок ();
- блок вычислительных устройств (11)
- производит расчет матрицы коэффициентов усиления;
- вычисление вектора апостериорной разницы  ;
;
- информационная шина (29) передает вектор апостериорной разницы  ;
;
- блок вычислительных устройств (16) производит расчет вектора априорной разницы  ;
;
- информационная шина (33) передает вектор априорной разницы  ;
;
- в сумматоре (12) вычисляется оптимальная оценка вектора состояния  ;
;
- информационная шина (30) передает оптимальную оценку вектора состояния  ;
;
- блок вычислительных устройств (14)
- запоминает оптимальную оценку вектора состояния ( ), принимаемую как апостериорную для последующего шага (
), принимаемую как апостериорную для последующего шага ( ),
),
- инициализирует на первом шаге вычислений начальные значения вектора состояния ( );
);
- информационная шина (31) передает оптимальную оценку вектора состояния с предыдущего шага ( );
);
- пятый блок вычислительных устройств (15) производит расчет априорной оценки вектора состояния ( );
);
- информационная шина (32) передает априорную оценку вектора состояния ( );
);
- блок вычислительных устройств (13) производит пересчет оптимальной оценки из платформенной системы, в которой рассчитан вектор состояния, в географическую систему ( ,
,  ,
,  ,
,  );
);
- информационная шина (31) передает оценки ошибок координат и составляющих путевой скорости;
- сумматор (17) формирует оцененные параметры координат и составляющих путевой скорости:  ,
,  ,
,  ,
,  и признаки их достоверности Дост
и признаки их достоверности Дост  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  ;
;
- информационная шина (35) передает оцененные параметры координат и составляющих путевой скорости:  ,
,  ,
,  ,
,  и признаки их достоверности Дост
и признаки их достоверности Дост  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  назадатчик (18);
назадатчик (18);
- задатчик (18) в зависимости от режима работы устройства формирует на выход
- сигналы информационной шины (25) -  ,
,  ,
,  ,
,  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  ;
;
- информационной шины (35) -  ,
,  ,
,  ,
,  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  , Дост
, Дост  ;
;
- информационная шина (36) передает выходной сигнал потребителю в зависимости от заданного навигационного режима.
Таким образом, использование предлагаемого устройства позволит обеспечивать выполнение специальных режимов (групповой полет, «висение» вертолета) и полетов в условиях «узких» коридоров (при заданном уровне точности менее 1 м.м.) за счет выходных навигационных параметров, имеющих малые градиенты погрешностей.
Работоспособность предложенного устройства была подтверждена результатами математического моделирования с использованием реальных данных датчика (БИНС) и корректора (СНС) в режимах группового полета самолетов и режима «висение» вертолета и при полете в условиях RNP0,6. Результаты подтвердили получение положительного эффекта, то есть уменьшение градиента изменения погрешностей навигационных параметров на ~35% [3]. В настоящее время ведутся работы по внедрению данного устройства в состав бортового программного обеспечения вычислительных систем для вертолетов и самолетов ВТА.
Источники информации
1. Авиационные приборы и навигационные системы. Под ред. О.А. Бабича, М, изд. ВИА им. Н.Е. Жуковского, 1981.
2. О.А. Степанов. Особенности построения и перспективы развития навигационных инерциально-спутниковых систем. Санкт-Петербург, Сборник статей и докладов «Интегрированные инерциально.-суптниковые системы навигации» под ре. В.Г. Пешехонова, 2001.
3. Ю.В. Гавриленко, Н.А. Зайцева, Е.В. Кочнева. Построение субоптимального двухступенчатого фильтра Калмана для решения отдельных навигационных задач. Сборник докладов IV Конференции молодых ученых, ГНЦ РФ-ЦНИИ «Электроприбор», Международная общественная организация «Академия навигации и управления движением», 2002.
4. Н.А. Голованов, Н.А. Зайцева, Е.В. Кочнева Двухступенчатый субоптимальный фильтр для обеспечения полетов на малых скоростях. Москва, Авиакосмическое приборостроение №5, 2002.
5. Г. Крамер. Математическая статистика. М.: изд. Мир, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2659755C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2002 |
|
RU2237234C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
Изобретение относится к области авиационного приборостроения и может быть применено в интегрированных системах, использующих информацию с зашумленным сигналом, в частности от спутниковой навигационной системы (СНС), и обеспечивающих целостность навигационной информации системы. Технический результат – расширение функциональных возможностей на основе уменьшения градиента изменения навигационных параметров и повышение уровня точности оцениваемых параметров местоположения и скоростей воздушного судна. Для этого в устройство обработки сигналов, содержащее систему счисления пути, корректор, фильтр Калмана, первый и второй сумматоры, при этом один из выходов системы счисления пути соединен с первым входом блока контроля первичной информации, подключенного первым выходом к первым входам первого и второго сумматоров, при этом вторым входом первый сумматор соединен с выходом корректора, а выходом связан через фильтр Калмана со вторым входом второго сумматора, дополнительно введены задатчик, а также четыре сумматора и пять блоков вычислительных устройств, часть из которых образуют блок коррекции, при этом блок контроля первичной информации дополнительно подключен первым выходом к первым входам третьего и шестого сумматоров, связанных между собой через блок коррекции, включающий последовательно соединенные первый блок вычислительных устройств, входом соединенный с выходом третьего сумматора, четвертый сумматор, второй блок вычислительных устройств, пятый сумматор, а также третий блок вычислительных устройств, который в свою очередь подключен ко второму входу шестого сумматора, при этом блок коррекции также включает последовательно соединенные четвертый блок вычислительных устройств, подключенный входом к выходу пятого сумматора, пятый блок вычислительных устройств, подключенный выходом ко второму входу пятого сумматора, а также шестой блок вычислительных устройств, соединенный выходом со вторым входом четвертого сумматора. 1 ил.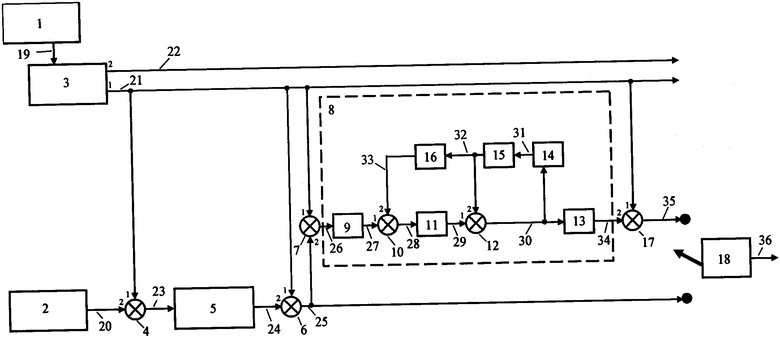
Устройство обработки сигналов, содержащее систему счисления пути, корректор, фильтр Калмана, первый и второй сумматоры, при этом один из выходов системы счисления пути соединен с первым входом блока контроля первичной информации, подключенного первым выходом к первым входам первого и второго сумматоров, при этом вторым входом первый сумматор соединен с выходом корректора, а выходом связан через фильтр Калмана со вторым входом второго сумматора, отличающееся тем, что в него дополнительно введены задатчик, а также четыре сумматора и пять блоков вычислительных устройств, часть из которых образуют блок коррекции, при этом блок контроля первичной информации дополнительно подключен первым выходом к первым входам третьего и шестого сумматоров, связанных между собой через блок коррекции, включающий последовательно соединенные первый блок вычислительных устройств, входом соединенный с выходом третьего сумматора, четвертый сумматор, второй блок вычислительных устройств, пятый сумматор, а также третий блок вычислительных устройств, который в свою очередь подключен ко второму входу шестого сумматора, при этом блок коррекции также включает последовательно соединенные четвертый блок вычислительных устройств, подключенный входом к выходу пятого сумматора, пятый блок вычислительных устройств, подключенный выходом ко второму входу пятого сумматора, а также шестой блок вычислительных устройств, соединенный выходом со вторым входом четвертого сумматора.
| О.А | |||
| Степанов | |||
| Особенности построения и перспективы развития навигационных инерциально-спутниковых систем | |||
| Санкт-Петербург, Сборник статей и докладов "Интегрированные инерциально-спутниковые системы навигации" под ред | |||
| В.Г | |||
| Пешехонова, 2001 | |||
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2002 |
|
RU2237234C2 |
| КВАЗИОПТИМАЛЬНЫЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2005 |
|
RU2300173C1 |
| Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий | |||
| Под ред | |||
| М.Н | |||
| Красильщикова и Г.Г | |||
| Себрякова, М: ФИЗМАТЛИТ, 2005 г., стр | |||
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
| Авиационные приборы и навигационные системы | |||
| Под ред | |||
| О.А | |||
| Бабича, М.: изд | |||
| ВВИА им | |||
| Н.Е | |||
| Жуковского, 1981 г., стр | |||
| ПЕРЕНОСНОЙ КУХОННЫЙ ОЧАГ С КИПЯТИЛЬНИКОМ | 1920 |
|
SU587A1 |

