2,Электропривод по п. 1, о т л и чающийся тем, что в него введен второй регулятор тока, подключенный к выходу второго выпрямителя.
3.Электропривод по п. 1, отличающийся тем, что регулятор тока подключен параллельно обмотке ротора одного электродвигателя.
Ц, Электропривод по п. 1, о т л и чающийся тем, что регулятор тока подключен последоватб.. ,но К входу первого выпрямителя.
5. Электропривод по п. 1, о т л ичающийся тем, что регулятор тока подключен последовательно к обмотке статора одного электродвигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод | 1978 |
|
SU752726A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2237345C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1999 |
|
RU2176848C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| Электропривод | 1984 |
|
SU1377994A1 |
| Электропривод переменного тока | 1983 |
|
SU1100705A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
1. ДВУХДВИГАТЕЯЬНЫЙ ЭЛЕКТР ПРИВОД, содержащий механически соед ненные два асинхронных электродвига тё/1Я, два выпрямителя, вход первого 0ыпоямителя связан с обмоткой ротора одного электродвигателя, а «го один вывод выхода связан с одно(имённым выводом выхода второго выпря-. 1итёля и с одним выводом резистора, другой вывод которого связан с другим выводом выхода первого выпрямителя, регулятор, тока в цепи обмотки одного электродвигателя, отличающийся тем, что, с целью расширения диапазона регулирования скорости вращения и повышения энергетических показателей,) второй выпрямитель входом подключен к обмотке ротора другого электродвигателя а его другой вывод выхода связан с другим выводом резистора, обмотки статоровэлектродвигателей под-,р ключены к источнику переменного тока с противоположным друг другу чередованием фаз.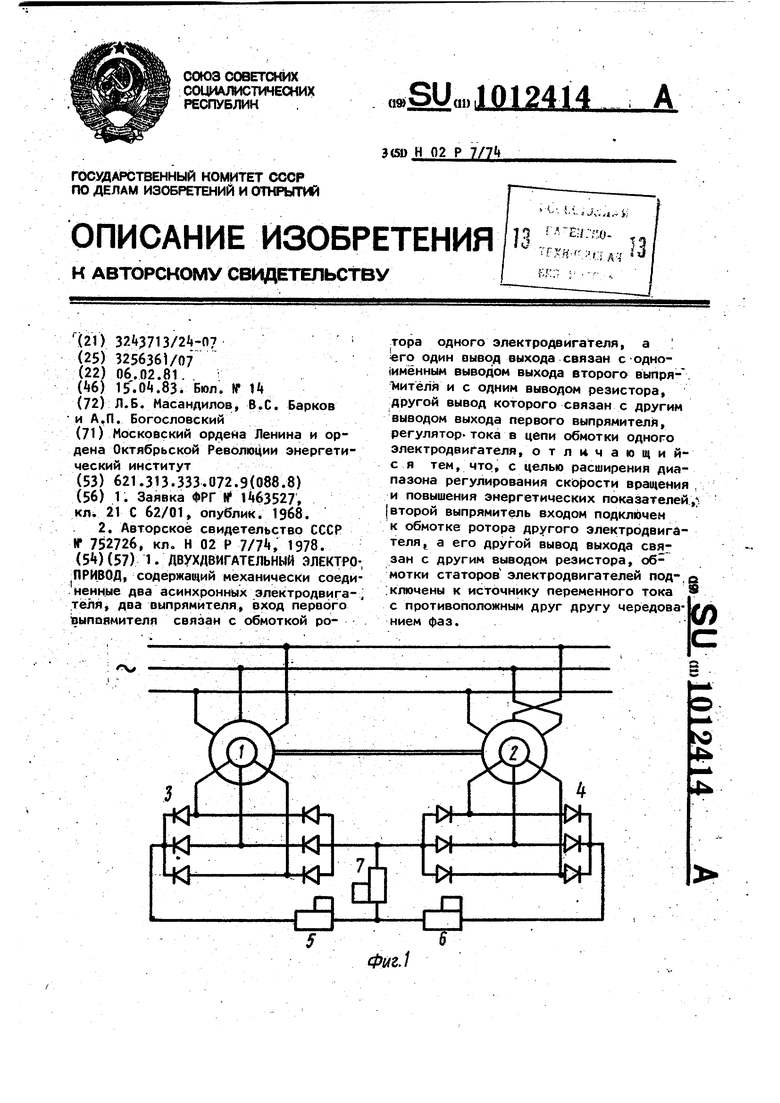
Изобретение относится к электротехнике и может быть использовано в электроприводах производственны) механизмов, например, в механизмах подъемно-транспортных машин.
Известен двухдвигательный электропривод, содержащий два выпрямителя, входы которых подключены к обмоткам роторов соответствующих электродвигателей, а выходы соединены параллельно и подключены к якорЮ машины постоянного тока J.
Недостатком данного устройства является его сложность в связи с наличием дополнительной электрической машины.
Наиболее близким к предлагаемому по технической сущности и дocfигaeмoму эффекту является двухдвигательный электропривод, содержащий механически соединенные два асинхронных электродвигателя, два выпрямителя, причем вход первого выпрямителя связан с обмоткой ротора одного электродвигателя, а его один вывод выхода соединен G одноименным выводом выхода второго выпрямителя и с одним выводом резистора, другой вывод которого соединен с другим выводом выхода первого выпрямителя, регулятор тока в цепи обмотки статора электродвигателя , один вывод которого соединен с другим выводом резистора, а другой вывод регулятора тока соединен через обмотку статора с выходом, второго выпрямителя, подключенного входом к источнику переменного тока t.l.
Недостатком известного устройства является низкий диапазон регулирования скорости вращения электродвигателей из-за несогласованности величи
напряжений на выходах выпрямителей, а также низкие энергетические показатели в связи с дополнительными потерями электроэнергии в регуляторах 5 тока при работе электродвигателей на заданной искусственной механической характеристике.
Цель изобретения - расширение диапазона регулирования скорости вра10 щения электродвигателей и повышение энергетических показателей.
Эта цель достигается тем,снто в двухдвигательный электропривод, содержащий механически соединенные два 15 асинхронных электродвигателя, два выпрямителя, причем вход первого выпрямителя связан с обмоткой ротора Годного электродвигателя, а его один вывод выхода соединен с одноименным 20 выводом выхода второго выпрямителя и с одним выводом резистора, другой вывод которого связан с другим выводом выхода первого выпрямителя, регуляjTOp тока в цепи обмотки одного элект25 родвигат.еля, второй выпрямитель вхо- дом подключен к обмотке ротора другого электродвигателя, а его другой вывод выхода связан с другим выводом резистора, обмотки статоров электро:JQ двигателей подключены к источнику переменного тока с противоположным друг другу чередованием фаз.
Кроме того, в двухдвигательный электропривод введен второй регулятор тока, подключенный к выходу второго выпрямителя.
В двухдвигательном электроприводе регулятор тока подключен параллельно обмотке ротора одного электродвигателя
40 В двухдвигательном электроприводе регулятор тока подключен последовательно к входу первого выпрямителя.
в двухдвигательном эле(троприводе регулятор тока подключен последовательно с обмоткой статора одного электродвигателя.
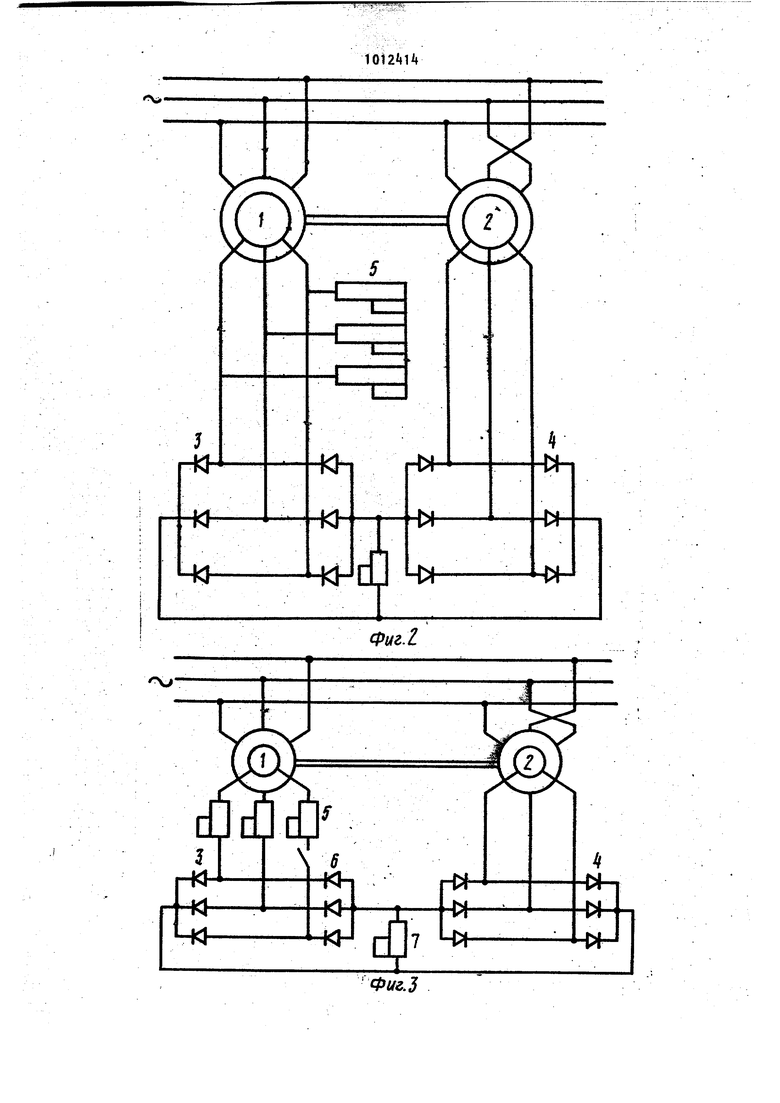
На фиг. 1- показаны схемы уст- 5 ройства; на фиг. 5 - механические характеристики электродвигателей.
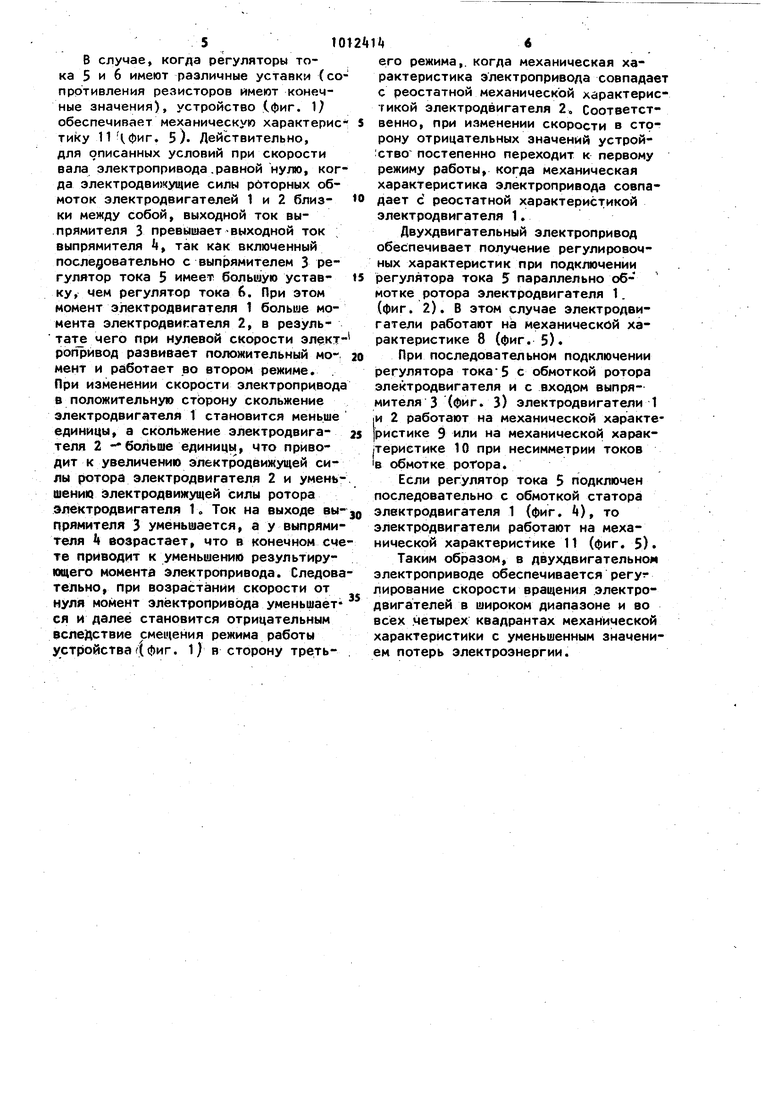
Двухдвигательный электропривод (фиг. 1) содержит механически соединенные асинхронные электродвигате- ли 1 и 2, обмотки статоров которых подключены к источнику переменного тока с противоположным друг другу чередованием фаз, выпрямители 3 и t, входы которых соединены с обмотками 15 роторов электродвигателей 1 и 2, одни одноименные выводы выходов выпрямителей объединены; а другие выводы выходов через соответствующие регуляторы токов 5 и 6 соединены с одним вы- ь20 водом резистора 7,другой вывод которого соединен с объединенными выводами выходов выпрямителей 3 и 4. В двухдвигательном электроприводе (фиг. 2) регулятор тока 5 подк/вочен 25 параллельно обмотке ротора электродвигателя 1. В двухдвигательном элект роприводе СФиг. 3) рёг ;ляторы тока 5 и 6 включены последовательно к входу выпрямителя 3 причем регулятор то- jg ка 5 может быть выполнен в виде резисторов, а регулятор тока 6 - в виде .коммутационного элемента. В двухдвигательном электроприводе (фиг. k) регулятор тока 5 подключен последовательно с обмоткой статора электродви- гателя 1. На фиг. 5 показаны механические характеристики 8-12 электродвигателей 1 и 2.
Устройство работает следующим образом.
При подключении обмоток статоров электродвигателей 1 и 2 к источнику переменного тока в обмотках ротора ;наводится ЭДС.
Устройство может работать в одном из трех режимов, что определяется величинами напряжений на выходе выпрямителей 3 и . Если напряжение выпрямителя 3 значительно больше напряжения выпрямителя , то выпрями- тель k закрыт, и.устройство работает в первом режиме. Если же напряжение выпрямителя k значительно выше напряжения выпрямителя 3 то последний закрыт, и устройство работает в третьем режиме. В том случае, когда напряжения выпрямителей 3 и 4 близки .друг к другу, имеет мебто второй режим, при этом протекает ток по обоим выпрямителям и разность между выходным напряжением выпрямителя 3 и падением напряжения на регуляторе тока 5 равна разности выходного напряжения выпрямителя k и падения напряжения на регуляторе тока 6.
Во втором режиме работы устройства моменты асинхронных электродвигателей 1 и 2 направлены на встречу ;ДРУГ другу так как чередование подключенных к сети переменного тока фаз статоров этих двигателей противоположно друг другу, а при этом один из электродвигателей 1 и 2 работает в двигательном, а другой - в тормозном режимах.
В случае, когда регуляторы токов 5 и 6 имеют максимальную уставку (сопротивления резисторов равны нулю), устройство обеспечивает механическую характеристику 12 (фиг. 5). Действительно, для описанных условий при скорости вала электропривода- равной нулю, токи в роторных цепях двигателей и 2 оказываются одинаковым. Поэтому моменты этих двигателей равны -по величине и противоположны по знаку, а при таких условиях результирующий момент электропривода равен нулю. Если скорость вала электропривода становится отрицательной, то скольжение двигателя 1 больше единицы, а скольжение двигателя 2 - меньше единицы. При этом электродвижущая сила в обмотке ротора электродвигателя 1 больше, чем у электродвигателя 2, что приводи к уве.пичению тока на выходе выпрямителя 3 и к уменьшению тока на выходе выпрямителя Ц, вследствие чего момент электродвигателя 1 возрастает, а у электродвигателя 2 уменьшается. При дальнейшем изменении скорости в сторону отрицательных значений выходной ток выпрямителя становится равным нулю и далее не изменяется из-за односторонней проводимости вентилей выпрямителя 4, что определяет первый режим работы устройства, вследствие чего устройствоработает на участке реостатной характеристики электродвигателя 1. Если скорость вала электропривода изменяется в положительную сторону, то устройство работает аналогично описанному, только при этом скольжение электродвигателя 1 оказывается меньше единицы, а у электродвигателя 2 - больше единицы. 5 o в случае, когда регуляторы тока 5 и 6 имеют различные уставки (со противления резисторов имеют конечные значения), устройство (фиг. ) обеспечивает механическую характерис тику 11ЧФИГ. 5). Действительно, для описанных условий при скорости вала электропривода .равной нулю, ког да электродвижущие силы рбторных обмоток электродвигателей 1 и 2 близки между собой, выходной ток выпрямителя 3 превышает-выходной ток ; выпрямителя , так как включенный последовательно с выпрямителем 3 регулятор тока 5 имеет большую уставку, чем регулятор тока 6. При этом момент электродвигателя 1 больше момента электродвигателя 2, в резуяь тате чего при нулевой скорости элект ропрйвод развивает положительный момент и работает во втором режиме. При изменении скорости электропривод в положительную сторону скольжение электродвигателя 1 становится меньше единицы, а скольжение электродвигателя 2 - больше единицы, что приводит к увеличению электродвижущей силы ротора электродвигателя 2 и умень шению Электродвижущей силы ротора Электродвигателя 1. Ток на выходе BM прямителя 3 уменьшается, а у выпрями теля возрастает, что в конечном сч те приводит к уменьшению результирующего момента электропривода. Следов тельно, при возрастании скорости от нуля момент электропривода уменьшает ся и далее становится отрицательным вследствие смещения режима работы ycтpoйctвa((фиг. 1) в сторону треть его режима,, когда механическая характеристика электропривода совпадает с реостатной механической характеристикой электродвигателя 2. Соответственно, при изменении скорости в сторону отрицательных значений устрой;ство постепенно переходит к первому режиму работы, когда механическая характеристика электропривода совпадает с реостатной характеристикой электродвигателя 1. Двухдвигательный электропривод обеспечивает получение регулировочных характеристик при подключении (эегулятора тока 5 параллельно обмотке ротора электродвигателя 1. (фиг. 2). В этом случае электродвигатели работают на механической характеристике 8 (фиг. 5). При последовательном подключении регулятора тока5 с обмоткой ротора электродвигателя и с входом выпрямителя 3 (фиг. 3) электродвигатели 1 и 2 работают на механической характе ристике 9 или на механической характеристике 10 при несимметрии токов IB обмотке роГора. Если регулятор тока 5 подключен последовательно с обмоткой статора электродвигателя 1 (фиг. «), то электродвигатели работают на механической характеристике 11 (фиг. 5). Таким образом, в двухдвигательном электроприводе обеспечивается регулирование скорости вращения .электродвигателей в широком диапазоне и во всех .четырех квадрантах механической характеристики с уменьшенным значением потерь электроэнергии.
Фиг.2
Г-И
w-ww
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Трансмиссия гусеничной машины | 1986 |
|
SU1463527A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Двухдвигательный электропривод | 1978 |
|
SU752726A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
