Изобретение относится к весоизмерительной технике, в частности к взвешиванию железнодорожного состава во время движения.
Известен способ динамического взвешивания, состоящий в перемещении объекта по весам, измерении усилий, действующих на весоизмерительный преобразователь, определение экстремумов усилий, при которых задают скорость перемещения объекта, допустимые пределы интервала времени между экстремумами, определяют количество интервалов времени между экстремумами, продолжительность которых находится в допустимых пределах и выходит за них, определяют отношение количества интервалов, вышедших за допустимые пределы, к общему количеству интервалов и при отношении, не выходящем за заданный предел, определяют вес объекта или его части усреднением измерительный усилий, действующих на интервалах времени, продолжительность которых находится в заданных пределах, в противном случае - измеряют скорость перемещения объекта по весам и повторяют процесс измерения.
Известный способ защищает процесс измерения от воздействия так называемых коротких неровностей (типа стык рельсов, выбоина в колесе и т.д.). Нестационарные выбросы сигнала, вызванные короткими неровностями пути (или колес), могут быть отфильтрованы согласно известному способу. Однако длинные неровности пути, вызывающие значительные (порядка процентов) перераспределения осевых нагрузок объекта, существенно снимают точность способа при работе на реальном железнодорожном пути. Длинная неровность может изменить уровень сигнала весоизмерительного преобразователя на все время проезда взвешиваемой оси по
1Л
С
2
О V4
Ю
весовому модулю, что не может быть обнаружено анализом формы самого сигнала.
Известен способ поосного взвешивания, включающий измерение усилий, действующих на весы от оси объекта, определение направления движения объекта, предварительное тарирование весов с помощью контрольных объектов различной осности для определения масштабирующих коэффициентов и определения массы взвешиваемого объекта суммированием результатов взвешивания его осей, умноженных на осевые коэффициенты, определяемые при многократном прокатывании контрольных объектов по весам и измерении значения веса каждой оси путем деления веса контрольного объекта на произведение числа осей объекта на усредненное значение веса каждой оси.
Однако известный способ имеет недостатки: определение распределения усилий по осям контрольных объектов трудоемкая операция, которую трудно выполнять с необходимой точностью, так как в процессе взвешивания отдельных осей, например, путем использования железнодорожных весов с двумя (большой и малой) грузоподъемными платформами также происходит перераспределение усилий между осями объекта. В силу этого такое определение развески контрольного объекта по осям требует многократного повторения операций взвешивания.
Кроме того, распределение усилий контрольного объекта по осям трудно сохранить неизменным в процессе эксплуатации из-за износа элементов рессорного подвешивания объекта и возможного перемещения контрольных грузов на нем.
Цель изобретения - повышение точности.
Указанная цель достигается тем, что согласно способу поосного взвешивания железнодорожных вагонов в движении, включающему определение осевых коэффициентов контрольных вагонов известной массы при прямым к обратном ходе по весам, измерение осевых усилий, определение направления движения и осности вагонов, вычисление их массы суммированием произведений осевых усилий на осевые коэффициенты контрольных вагонов дополняют тем, что перед обратным ходом контрольного вагона по весам его разворачивают на 180°, а осевые коэффициенты контрольных вагонов известной массы вычисляют в зависимости от их осности по приводимым формулам.
Предлагаемая технология позволяет обойтись без трудоемкой операции определения развески объектов по осям, не всегда возможной, так как не на каждом предприятии есть сдвоенные железнодорожные весы. Предлагаемый способ позволяет
определить осевые коэффициенты, не зная, как распределен вес контрольного объекта по осям, а только зная общий вес Р.
Получаемое повышение точности состоит в том, что общий вес контрольного объек0 та можно определить и обеспечить его постоянство в процессе эксплуатации со значительно большей точностью, чем развеску по осям, которая может изменяться, например, из-за дефектов системы рессорного
5 подвешивания.
Общепринятые методики поверки вагонных весов предусматривают контроль характеристики весов в нескольких точках, т.е. при разных нагрузках, что достигается
0 наложением (или снятием) гирь на контрольный объект. Обеспечить равное или заданное распределение налагаемый гирь по осям объекта-задача трудная. Проверить же такую развеску на каждой точке трудоемко,
5 так как это требует перемещения контрольного объекта к сдвоенным весам, которые могут быть весьма удалены от проверяемых поосных весов, и нет уверенности, что при транспортировании контрольного объекта
0 развеска сохранится, так как контрольные гири при транспортировке могут сместиться.
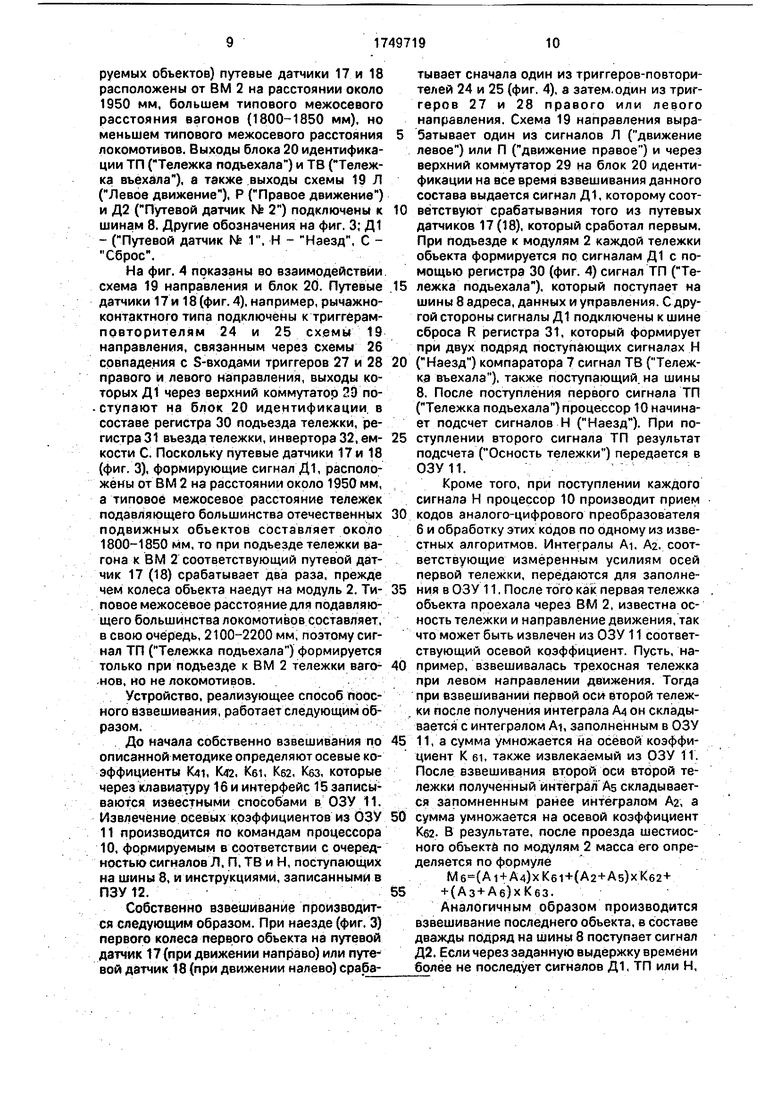
На фиг. 1 и 2 показаны графики для иллюстрации сущности предлагаемого спо5 соба; на фиг. 3 и 4 - схемы устройства для реализации предлагаемого способа.
Предлагаемый способ предназначен для подавления помех, вызываемых перераспределением осевых нагрузок из-за не0 ровностей пути, Несмотря на большое разнообразие типов подвижных объектов, тележки их имеют типовые межосевые расстояния (около 1800-1850 мм). Первая и вторая тележки объектов могут быть разнесены
5 одна от другой на различные расстояния, однако это не имеет большого значения, так как перераспределение осевых нагрузок от неровностей пути локализируется ввиду наличия автономной пружинной системы ре0 ссорного подвешивания в основном между осями данной тележки, слабо влияя на соседние тележки.
Таким образом, взаимодействие неровностей железнодорожного пути и весовых
5 модулей носит при идеальном состоянии подвижного объекта не случайный, а детерминированный характер и может быть учтено осевыми коэффициентами, принципиально различными для тележек различной осности. Осевые коэффициенты есть не что иное,
как индивидуальные для каждой оси масштабные множители, применение которых позволяет уменьшить влияния профиля железнодорожного пути на результат взвешивания. Для четырехосных объектов (т.е. двуосных тележек) этих коэффициентов два - KUi и К42 соответственно для взвешивания осей при подъезде к весовым модулям, например, справа и слева.
Для шестиосных объектов (т.е. трехос- ных тележек) это коэффициенты Kei, Кб2 и Кбз, отвечающие трем возможным вариантам взаимодействия трехосной тележки и весовых модулей. При дальнейшем рассмотрении подразумевается, что измерение осевых усилий происходит в течение всего периода времени, пока взвешиваемая ось движется по весовому модулю.
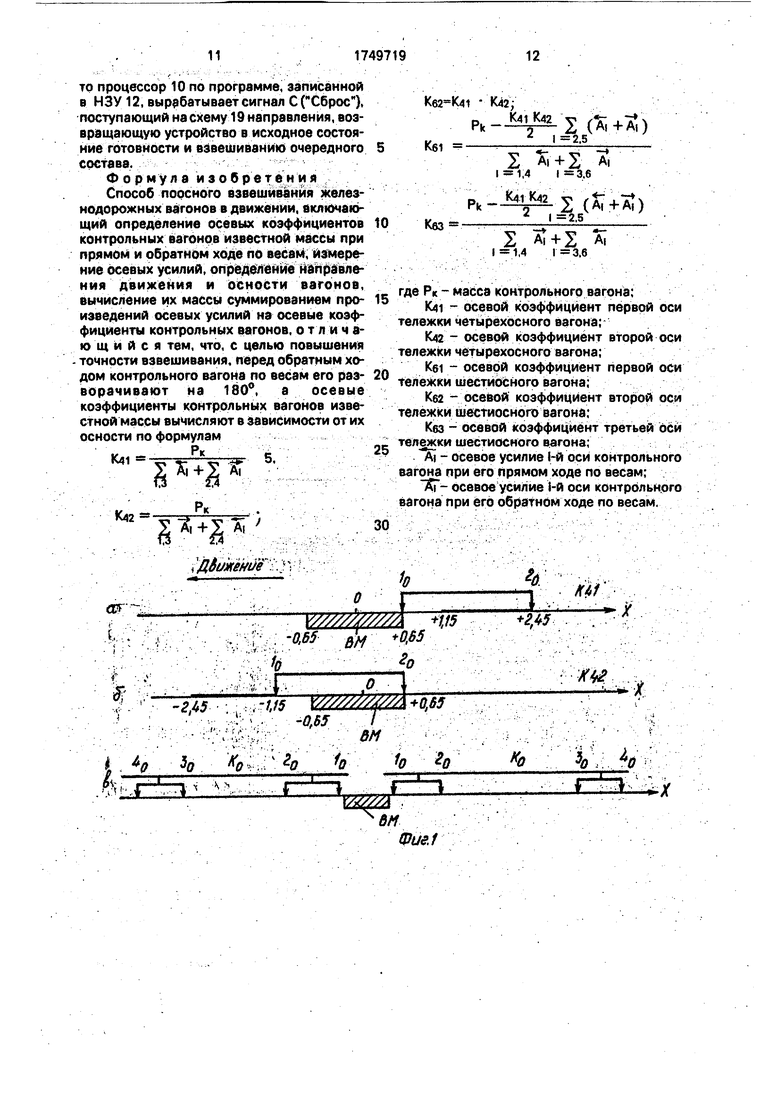
Рассмотрим случай четырехосного объекта (фиг. 1).
Начало координат О разместим в центре весовых модулей ВМ. Оси 10 и 20, например, первой тележки четырехосного объекта расположены на расстоянии 1800 мм.
Поэтому при направлении движения, показанном на фиг. 1 стрелкой, при взвешивании первой оси 10 (фиг. 1а) взаимодействуют и, следовательно, определяют перераспределение усилий 10 и 20 во время взвешивания неровности весовых модулей и участка подъездных путей с координатами +2,45 (м) и 1,15 (м). Результатом этого взаимодействия неровностей является осевой коэффициент K4i. Соответственно результатом взаимодействия неровностей весовых модулей (ВМ) и неровностей подъездных путей с координатами -1,15; -2,45 при взвешивании второй оси 20 (фиг, 16) является осевой коэффициент Юн. При расчете координат предполагается использование се- рийно выпускаемых весовых модулей ВМ длиной около 1300 мм, но суть вопроса не меняется при использовании и других модулей любой длины.
Взаимодействие осей 30 и 40 второй те- лежки полностью аналогично описанному взаимодействию осей 10 и 20.
Рассмотрим фиг. 1 в. При движении правого контрольного объекта (КО) по весовым модулям ВМ измерим, применяя известные способы, осевые усилия объекта
AL Да. Аз, А4
Стрелка над результатом измерения означает направления движения. После этого на железнодорожных путях (не изображены) разворачивают указанный КО на 180° так, что он подъезжает к весовым модулям ВМ с позиции слева, где оси 10-40 физически те же самые, что и на позиции справа (фиг. 1в).
Вновь производим измерения (при противоположном направлении движения):
AI, Аг. Аз, А4.
Поскольку по определению любой осевой коэффициент суть частное от деления усилия, действительно прилагаемого к весовым модулям ВМ, к измеренному значению, то запишем
K4ixЈj Pi: K42xAi Pi;
К42ХА2 Р2: К41ХА2 Р2,
К41хАз Рз; К42хАз Рз;
K42XAV1 Р4, К41ХА 4 P4I
где Pi, Р2, Рз и Р4 - подлинные (неизвестные нам) осевые усилия объекта.
Сгруппируем результаты следующим образом:
+ K41XA2 + K41XA3+K41XA 4 {Р1+Р2+Рз+Р4)Рк.
где Рк - общий (неизвестный) вес объекта Ко.
Отсюда
Соответственно
Рк
К42
Ai+2 Ai
1.32.4
Таким образом, осевые коэффициенты четырехосных объектов К41 и К42 определены.
В дальнейшем при взвешивании на ВМ любых четырехосных объектов определение массы объектов производится при левом (фиг. 1а) направлении движения по формуле
М4(А1+Аз)хК41+(А2+А4)хК42, а при правом направлении движения
М4(А1+Аз)хК42+(А2+А4)х К41,
где AI, А2, Аз, А4 - результаты (интегралы) измерения осевых усилий объекта в порядке очередности наезда.
При проезде через ВМ восьмиосного объекта, представляющего собой четыре двуосные тележки с самостоятельными системами рессорного подвешивания, получаем массу восьмиосного объекта (для левого движения)
Мв(А1+Аз+А5+А7)хК41+(А2+А4+Аб+
+Ав хК42
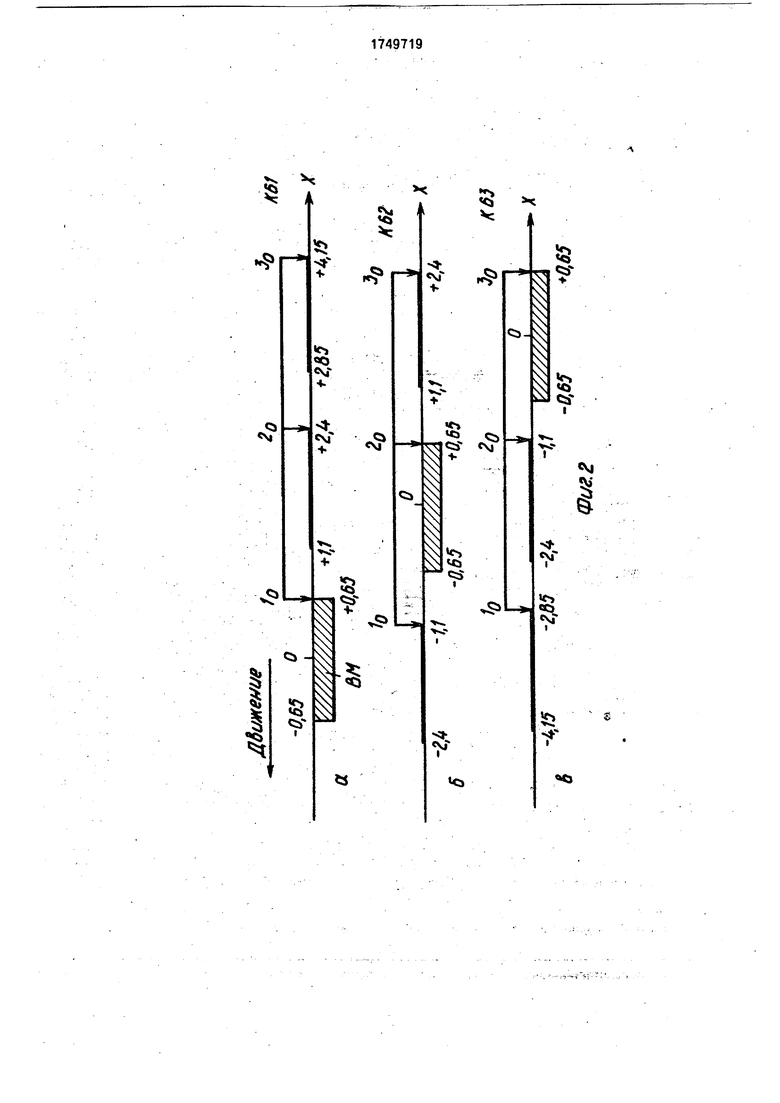
Особый случай представляет собой ше- стиосный объект, состоящий из двух трехосных тележек, причем каждая трехосная тележка оборудована системой рессорного подвешивания, в которой нескомплектованные усилия первой и третьей осей передаются на вторую ось, являющуюся балансировочной для обеих соседних осей. На фиг. 2 рассмотрены три случая соответственно взвешиванию первой оси 10(фиг.2а), второй оси 20 (Фиг. 26) и третьей оси 30 (фиг. 2в) взаимодействия неровностей ВМ и подъездных путей. Оси тележки объекта расположены на расстоянии 1,75 м одна от другой. Из Фиг. 2а видно, что при взвешивании первой оси 10 вторая 20 и третья 30 оси тележки проходят участки подъездного пути с координатами соответственно от 2,4 до 1,1 м и от 4,15 до 2,85м.
Таким образом, перераспределение осевых усилий в процессе взвешивания первой оси тележки шестиосного объекта определяется неровностями ВМ и указанных участков подъездных путей.
Из фиг. 26 следует, что перераспределение осевых усилий при взвешивании второй оси тележки определяется неровностями ВМ и участков подъездных путей с координатами от 2,4 до -1,1 м и от 1,1 до +2,4 м.
При взвешивании третьей оси тележки шестиосного объекта (фиг. 2в) перераспределение весовых усилий определятся неровностями ВМ и участков подъездных путей с координатами от 4,15 до -2,85 м и от 2,4 до -1,1 м. Произведем теперь с шестиос- ным объектом те же операции, что и с четырехосным. При прокатывании шестиосного объекта из первой позиции (фиг. 1в) по ВМ получаем шесть результатов
AI, Да, Аз, А4, As, Ае
Развернем объект на железнодорожных путях на 180°, так что он займет положение, аналогичное левой позиции (фиг. 1в).
Вновь прокатим объект по , получив шесть результатов Xi, A2, АЗ, Аи, As,
&.
Записывают результаты следующим образом:
KeixAf Pi; K63xAj Pi;
Кб2хА2 Pa; K62xKg P2i
Рз; Кб1хКз Рз:
РА; КезхА4 P/J;
Кб2хА5 PS; Кб2хА5 Рв;
КбзхАб Ре; Кб1хАб Ре.
Таким образом, при взвешивании второй оси трехосной тележки взаимодействуют те же участки подъездных путей, что и при взвешивании вначале первой, а затем второй оси двуосной тележки. Взаимодействие неровностей при взвешивании второй оси есть композиция неровностей, определяемых осевыми коэффициентами Юн и КдаПриняв Кб2 К41хК42, получаем Ра
5x42 X К42 X 2 ( А2 + А2.)
2
Рб
К41ХК42Х (АвЧм)
10
где Р2 и Ps - суть истинные усилия второй и пятой осей объекта. Напишем следующее равенство
- Рк
Кб1хА1+Кб1хАз+Кб1хА4+Кб1хАб Рк-Р2-РбК41 X К42
Ј (AI+A,),
.5
Отсюда Кб1
Pfc-J S (дТ + М
I 2.5
2 А,+Ј А,
,4 ,6
Соответственно
К41 К42
Кез
Pk- , 2 (Ai+Ai)
I 2,5
2 Ai + S
,4 1-3,6
Таким образом, при взвешивании на ВМ шестиосных объектов масса их вычисляется, например, при правом направлении движения по формуле
M6(Ai+A4)xKei+(A2+As)XK62+ +(Аз+Аб)хКбЗ, где Ач-Аб - результаты измерения осевых
усилий шестиосного объекта в порядке очередности наезда.
Устройство (фиг. 3) содержит встроенные в железнодорожный путь 1 весовые модули (ВМ) 2, расположенные один против
другого под соседними рельсами пути 1 и соединенные с фундаментными блоками 3 с помощью струнок-фиксаторов 4. Усилие от оси подвижного объекта передается на весоизмерительные датчики 5 (показан один
датчик 5), соединенные через аналого-цифровой преобразователь 6 и компаратор 7 с шинами 8 адреса, данных и управления микропроцессорного блока 9 обработки,содержащего центральный процессор 10,
оперативное запоминающее устройство (ОЗУ) 11, постоянное запоминающее устройство (ПЗУ) 12, интерфейс 13 терминального блока 14 и интерфейс 15 клавиатуры 16. Путевые датчики 17 и 18 подключены к схеме 19 направления, связанной с входами блока 20 идентификации, соединенного также через компаратор 7 с выходом весоизмерительных датчиков 5.
Для возможности распознавания вагонов и локомотивов (или других нерегистрируемых объектов) путевые датчики 17 и 18 расположены от ВМ 2 на расстоянии около 1950 мм, большем типового межосевого расстояния вагонов (1800-1850 мм), но меньшем типового межосевого расстояния окомотивов. Выходы блока 20 идентификации ТП (Тележка подъехала) и ТВ (Тележка въехала), а также выходы схемы 19 Л Левое движение), Р (Правое движение) и Д2 (Путевой датчик Мг 2) подключены к шинам 8, Другие обозначения на фиг. 3; Д1 - (Путевой датчик Мг 1, Н - Наезд, С - Сброс.
На фиг. 4 показаны во взаимодействии схема 19 направления и блок 20. Путевые атчики 17 и 18 (фиг. 4), например, рычажно- контактного типа подключены к триггерам- повторителям 24 и 25 схемы 19 направления, связанным через схемы 26 совпадения с S-входами триггеров 27 и 28 правого и левого направления, выходы коорых Д1 через верхний коммутатор 2D по- ступают на блок 20 идентификации в составе регистра 30 подъезда тележки, регистра 31 въезда тележки, инвертора 32, емкости С. Поскольку путевые датчики 17 и 18 фиг. 3), формирующие сигнал Д1, расположены от ВМ 2 на расстоянии около 1950 мм, а типовое межосевое расстояние тележек подавляющего большинства отечественных подвижных объектов составляет около 1800-1850 мм, то при подъезде тележки вагона к ВМ 2 соответствующий путевой датик 17 (18) срабатывает два раза, прежде чем колеса объекта наедут на модуль 2. Типовое межосевое расстояние для подавляющего большинства локомотивов составляет, в свою очередь, 2100-2200 мм, поэтому сигнал ТП (Тележка подъехала) формируется только при подъезде к ВМ 2 тележки вагонов, ко не локомотивов.
Устройство, реализующее способ поос- ного взвешивания, работает следующим образом.
До начала собственно взвешивания по описанной методике определяют осевые коэффициенты К/и, К42, Кб1, Кб2, Кез, которые ерез клавиатуру 16 и интерфейс 15 записываются известными способами в ОЗУ 11. Извлечение осевых коэффициентов из ОЗУ 11 производится по командам процессора 10, формируемым в соответствии с очередностью сигналов Л, П. ТВ и Н, поступающих на шины 8, и инструкциями, записанными в ПЗУ 12.
Собственно взвешивание производитя следующим образом. При наезде (фиг. 3) первого колеса первого объекта на путевой атчик 17 (при движении направо) или путевой датчик 18 (при движении налево) срабатывает сначала один из триггеров-повторителей 24 и 25 (фиг. 4), а затем.один из триггеров 27 и 28 правого или левого направления. Схема 19 направления выра- 5 батывает один из сигналов Л (движение левое) или П (движение правое) и через верхний коммутатор 29 на блок 20 идентификации на все время взвешивания данного состава выдается сигнал Д1, которому соот0 ветствуют срабатывания того из путевых датчиков 17(18), который сработал первым. При подъезде к модулям 2 каждой тележки объекта формируется по сигналам Д1 с помощью регистра 30 (фиг. 4) сигнал ТП (Те5 лежка подъехала), который поступает на шины 8 адреса, данных и управления. С другой стороны сигналы Д1 подключены к шине сброса R регистра 31, который формирует при двух подряд поступающих сигналах Н
0 (Наезд) компаратора 7 сигнал ТВ (Тележка въехала), также поступающий, на шины 8, После поступления первого сигнала ТП (Тележка подъехала) процессор 10 начинает подсчет сигналов Н (Наезд). При по5 ступлении второго сигнала ТП результат подсчета (Осность тележки) передается в ОЗУ 11.
Кроме того, при поступлении каждого сигнала Н процессор 10 производит прием
0 кодов аналого-цифрового преобразователя 6 и обработку этих кодов по одному из известных алгоритмов. Интегралы AL Аа, соответствующие измеренным усилиям осей первой тележки, передаются для заполне5 ния в ОЗУ 11. После того как первая тележка объекта проехала через ВМ 2, известна ос- ность тележки и направление движения, так что может быть извлечен из ОЗУ 11 соответствующий осевой коэффициент. Пусть, на0 пример, взвешивалась трехосная тележка при левом направлении движения. Тогда при взвешивании первой оси второй тележки после получения интеграла А4 он складывается с интегралом AI, заполненным в ОЗУ
5 11, а сумма умножается на осевой коэффициент К 61, также извлекаемый из ОЗУ 11. После взвешивания второй оси второй тележки полученный интеграл As складывается запомненным ранее интегралом Аа, а
0 сумма умножается на осевой коэффициент Кб2. В результате, после проезда шестиос- ного объекта по модулям 2 масса его определяется по формуле
Мб(А1 + А4)хКб1+(А2+Аб)хКб2+
5 +(Аз + Ае)хКбЗ.
Аналогичным образом производится взвешивание последнего объекта, в составе дважды подряд на шины 8 поступает сигнал Д2. Если через заданную выдержку времени более не последует сигналов Д1, ТП или Н,
то процессор 10 по программе, записанной в НЗУ12, вырабатывает сигнал С (Сброс), поступающий на схему 19 направления, возвращающую устройство в исходное состояние готовности и взвешиванию очередного состава.
Формула изобретения Способ поосного взвешивания железнодорожных вагонов в движении, включающий определение осевых коэффициентов контрольных вагонов известной массы при прямом и обратном ходе по весам, измерение осевых усилий, определение направления движения и осности вагонов, вычисление их массы суммированием произведений осевых усилий на осевые коэффициенты контрольных вагонов, отличающийся тем, что, с целью повышения точности взвешивания, перед обратным ходом контрольного вагона по весам его разворачивают на 180°, а осевые коэффициенты контрольных вагонов известной массы вычисляют в зависимости от их осности по формулам Рк
К41К«
CjpiOt
Р%Т)
0
5
0
5
Кд2;
(W)
Кб1 .
2 AI+X AI
,4 ,6
(Ј+д|}
I А| + Ј А,
,4 .6
где Рк - масса контрольного вагона;
Юл - осевой коэффициент первой оси тележки четырехосного вагона;
«42 - осевой коэффициент второй оси тележки четырехосного вагона;
Кб1 - осевой коэффициент первой оси тележки шестиосного вагона;
Кб2 - осевой коэффициент второй оси тележки шестиосного вагона;
Кез - осевой коэффициент третьей оси тележки шестиосного вагона;
А) - осевое усилие i-й оси контрольного вагона при его прямом ходе по весам;
АТ- осевое усилие 1-й оси контрольного вагона при его обратном ходе по весам.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поосного взвешивания объектов железнодорожного состава в движении | 1987 |
|
SU1425465A1 |
| Способ поосного взвешивания железнодорожного состава в движении | 1985 |
|
SU1278604A1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |
| Способ поколесного взвешивания подвижных объектов | 1990 |
|
SU1781553A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| ВАГОННЫЕ ВЕСЫ | 2002 |
|
RU2239800C2 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |

Изобретение относится к весоизмерительной технике и касается взвешивания железнодорожного состава во время движения. Целью изобретения является повышение точности взвешивания. Способ поосного взвешивания железнодорожных вагонов в движении включает определение осевых коэффициентов контрольных вагонов известной массы при прямым и обратном ходе по весам, измерение осевых усилий, определение направления движения и осности ваго- нов, вычисление их массы суммированием произведений осевых усилий на осевые коэффициенты контрольных вагонов. Перед обратным ходом контрольного вагона по весам его разворачивают на 180°, а осевые коэффициенты контрольных весов известной массы вычисляют в зависимости от их осности. 4 ил.
Дбимнйе :
. ; . -0,65 0fo+0,65
J oго
I
-245-W Y///jy/f/x yA+ttM
, .. -w 7
ли
0 30 К0, 20
вм
010 0
tf
N4
ь
k
/W
0
0
п
ьIsTU-n
« H-S277
X
c(cffpoc)
1в
JN
О-4Й1С
25 V 2S
ФигЛ
Составитель Е.Гусев Редактор Н.КоэоризТехред М.МоргенталКорректор Н.Король
Заказ 2588Тираж. Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
/7
я зо
Ъ
rfllH
19
Аг
Л
78
И &ФигЛ
Корре
| Способ поосного взвешивания железнодорожного состава в движении | 1985 |
|
SU1278604A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
