4
сл
со
о
I Изобретение относится к весоизмерительной технике.
Цель изобретения - повьшение точности,
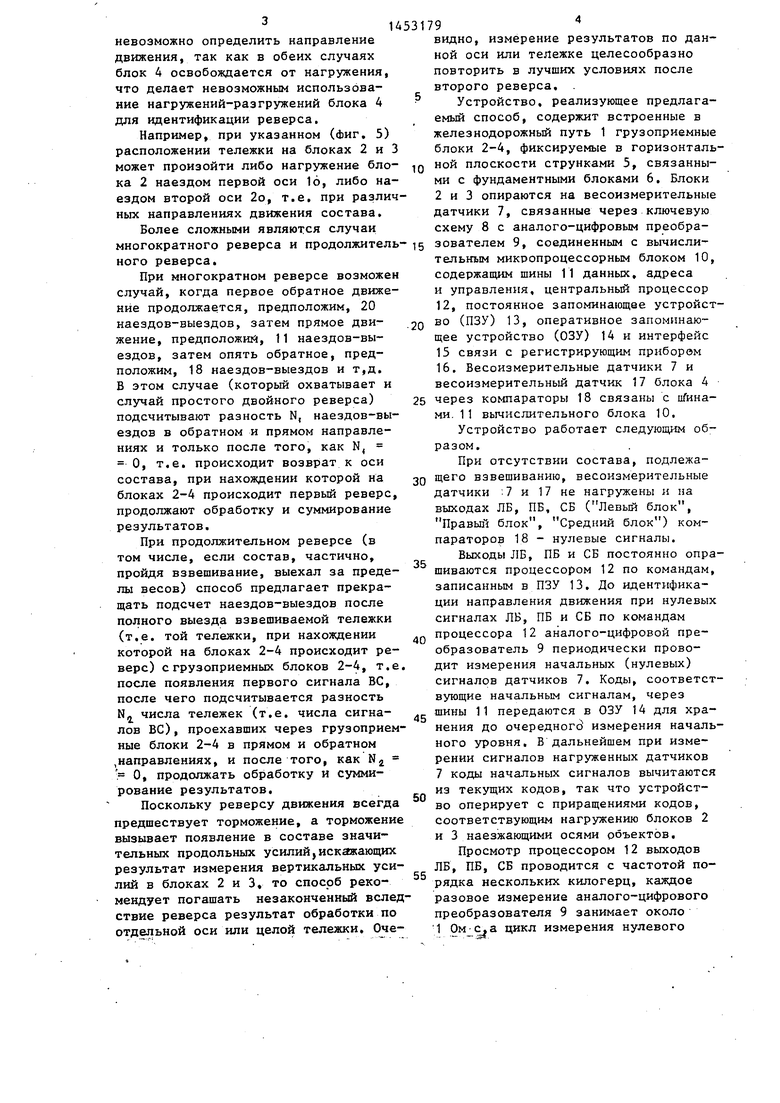
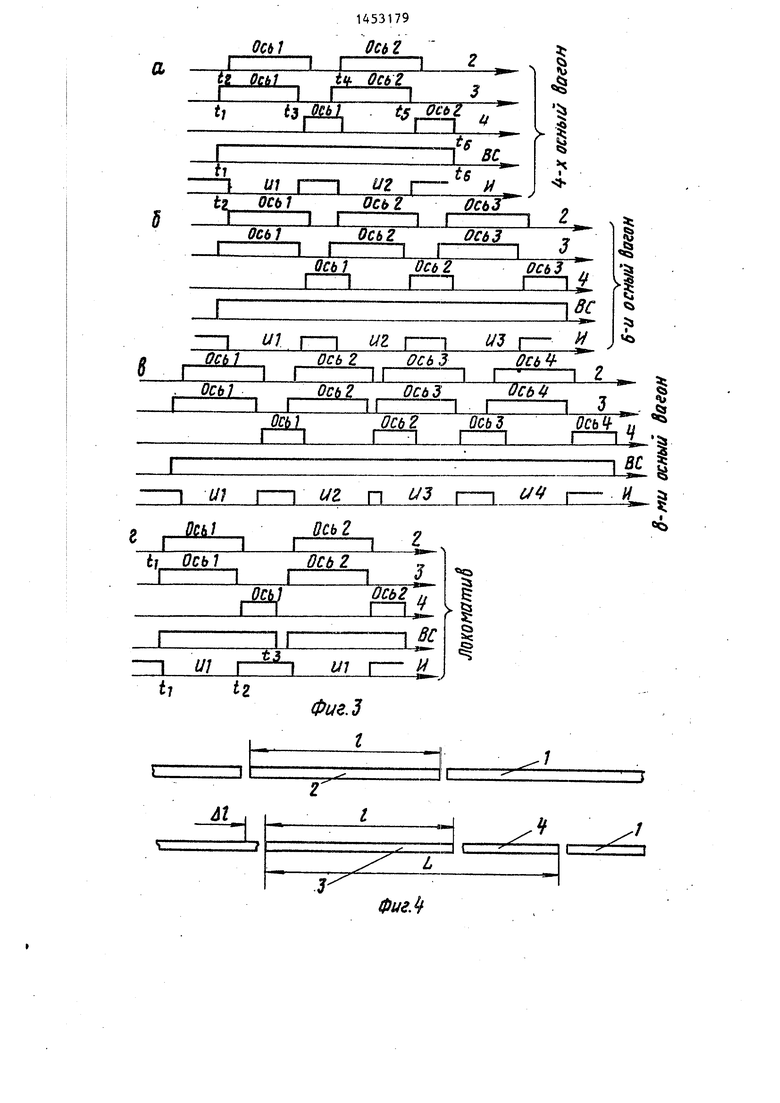
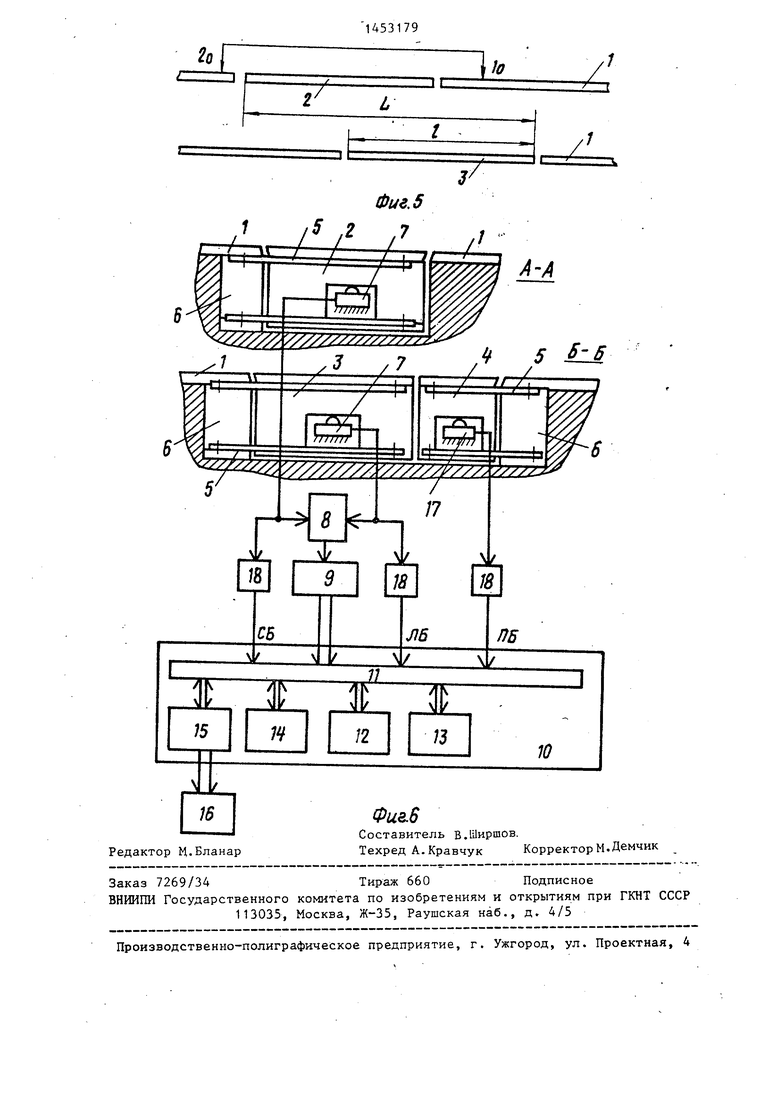
На фиг. 1 представлено (в плане) расположение грузоприемньпс блоковJ на фиг. 2 - справочные геометрические размеры подвижных объектов, с которы- Йи оперирует способ; на фиг. 3 - диа1граммы нагружений блоков при проезде по ним различных подвижных объемов, на фиг. 4 и 5 - альтернативные варианты расположения грузоприемных бло- ков , на фиг. 6 - блочно-кинематичес- кая схема устройства, реализующего способ и разрезы А-А и Б-Б на фиг.1.
Способ взвешивания подвижных объектов предусматривает (фиг. 1) установку на железнодорожном пути 1 измери- тельных грузоприемных блоков 2 и 3, каждый длиной 1, которые располагаются на соседних рельсах пути 1 со сдвигом ul что обеспечивает раздельный во времени наезд левых и правых |колес одних и тех же осей объектов. ; Грузоприемный блок 4 дополняет об- |щую длину весовой платформы, образо- |ванной блоками 2-4 до величины L ;( мм), большей межосевого рас|стояния вагонов (1800 мм), но мень- |шей межосевого расстояния локомотивов
|(л/2100 мм).
Принципиальное значение имеет то, что у любого из вагонов межосевые расстояния тележек Ь, 1800-1850 мм, |а у любого локомотива Ь 2100 - |2200 мм.
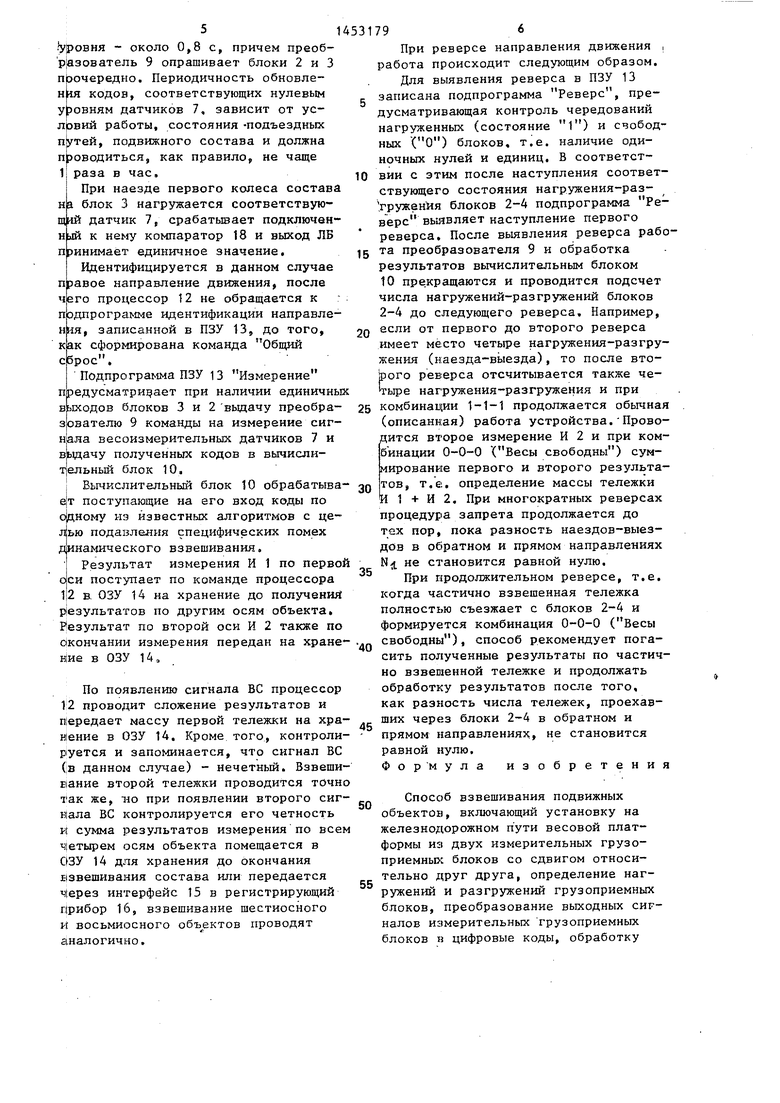
Как следует из диаграмм (фиг. 3), предлагаемые размеры весовой платфор- мы обеспечивают опознание вагонов и локомотивов, вьщачу команд на измерение и регистрацию результатов. На фиг. За приведены диа граммы нагруже- ния блока 2 (позиция 2), блока 3 (позиция 3) и блока 4 (позиция 4) при проезде по ним тележки четырехосного вагона.
Логическая функция ИЛИ (позиция ВС - Весы свободны) диаграмм 2-4 показывает, что после наезда (при движении слева) первой оси вагона на блок 3 в момент времени с, весы освобождаются только после выезда второй оси вагона с блока 4, т.е. в момент времени t. Обработку цифровых кодов, полученных в результате пре- образования выходных сигналов грузоприемных блоков 2 и 3, проводят в
0 5 л
5
0
5
промежутках времени от t до t и от t до ty- (на фиг. За промежутки обработки на позиции И: И 1 - первое измерение, И 2 - второе измерение).
К моменту времени с суммированием результатов И 1 и И. 2 получают массу тележки (т.е. двух осей) четырехосного вагона.
Рассматривая аналогичные диаграммы (фиг. 36) для проезда по блокам 2-4 трехосной тележки шестиосного вагона, видно, что в этом случае проводится три измерения и суммированием их может быть к моменту выезда тележки с блока 4 определена масса. тележки шестиосного объекта.
Равным образом, масса тележки восьмиосного объекта находится как сумма четырех изменений И 1, И 2, И 3, И 4 (диаграммы фиг. Зв).
Масса всего вагона (любой оснос- ти) определяется суммированием первых и вторых тележек каждого вагона, для чего результаты измерения масс тележек сортируют по принципу четности и массу вагона регистрируют после измерения массы каждой четной тележки-.
При проезде каждой оси локомотива (фиг, Зг) измерение начинается в момент времени t-j,, но в момент времени t формируется сигнал ВС.
Таким образом, по количеству измерений, произведенных в течение одного сигнала занятости весов (позиции ВС всех диаграмм, фиг. 3), идентифицируется подвижный объект.
Способ предлагает при реверсах движения прекращать после первого реверса обработку результатов, подсчитывать разность N, числа нагру- жений-разгружений (или наездов-выездов осей) в обратном и прямом направлениях и после того, как N, 0, продолжать обработку и суммирование результатов, причем реверс определяется по комбинации сигналов с грузопри емных блоков.
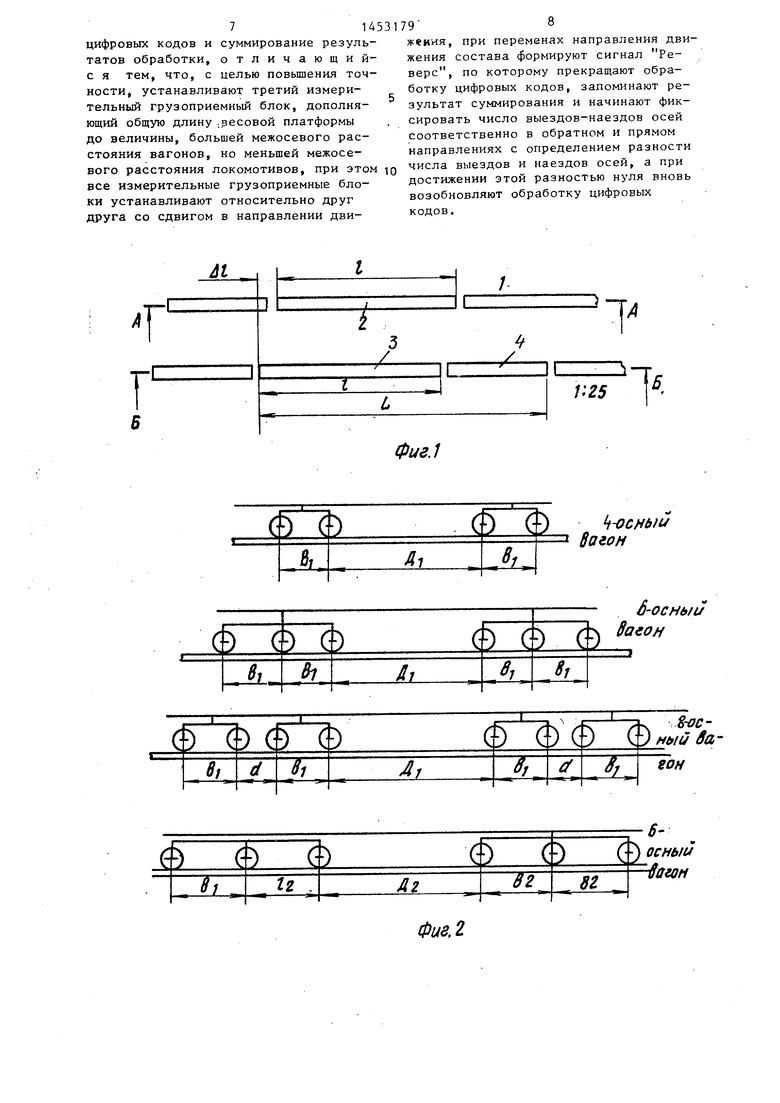
Другие известные композиции грузоприемных блоков не обладают свойством обнаруживать реверс в 100% технологических ситуаций. Так, если не сколько видоизменить расположение блоков 2-4 (фиг. 1)j,расположив их, как это изображено на фиг. 4, то, очевидно, при нахождении оси тележки (первой при движении справа или второй при движении слева) на блоке 4
невозможно определить направление движения, так как в обеих случаях блок 4 освобождается от нагружения, что делает невозможным использование нагружений-разгружений блока 4 для идентификации реверса.
Например, при указанном (Фиг, 5) расположении тележки на блоках 2 и 3 может произойти либо нагружение блока 2 наездом первой оси 16, либо наездом второй оси 2о, т.е. при различных направлениях движения состава.
Более сложными являются случаи многократного реверса и продолжитель ного реверса.
При многократном реверсе возможен случай, когда первое обратное движение продолжается, предположим, 20 наездов-выездов, затем прямое движение, предположил, 11 наездов-выездов, затем опять обратное, предположим, 18 наездов-выездов и т,д. В этом случае (который охватывает и случай простого двойного реверса) подсчитывают разность N, наездов-выездов в обратном и прямом направлениях и только после того, как N, О, т.е. происходит возврат к оси состава, при нахождении которой на блоках 2-4 происходит первьй реверс, продолжают обработку и суммирование результатов.
При продолжительном реверсе (в том числе, если состав, частично, пройдя взвешивание, выехал за пределы весов) способ предлагает прекращать подсчет наездов-выездов после полного выезда взвешиваемой тележки (т.е. той тележки, при нахождении которой на блоках 2-4 происходит реверс) сгрузоприемных блоков 2-4, т.е после появления первого сигнала ВС, после чего подсчитывается разность 1Л числа тележек (т.е. числа сигналов ВС), проехавших через грузоприем ные блоки 2-4 в прямом и обратном ,направлениях, и после того, как N2 . О, продолжать обработку и суммирование результатов.
Поскольку реверсу движения всегда предшествует торможение, а торможени вызывает появление в составе значительных продольных усилий,искажающих результат измерения вертикальных усилий в блоках 2 и 3, то способ рекомендует погашать незаконченный вслествие реверса результат обработки по отдельной оси или целой тележки. Оче
10
20
25
30
15
53179
видно, измерение результатов по данной оси или тележке целесообразно повторить в лучших условиях после второго реверса. .
Устройство, реализующее предлагаемый способ, содержит встроенные в железнодорожный путь 1 грузоприемные блоки 2-4, фиксируемые в горизонтальной плоскости струнками 5, связанными с фундаментными блоками 6. Блоки 2 и 3 опираются на весоизмерительные датчики 7, связанные через ключевую схему 8 с аналого-цифровым преобразователем 9, соединенным с вычислительным микропроцессорньм блоком 10, содержащим шины 11 данньк, адреса и управления, центральный процессор 12, постоянное запоминающее устройство (ПЗУ) 13, оперативное запоминающее устройство (ОЗУ) 14 и интерфейс 15 связи с регистрирующим прибором 16. Весоизмерительные датчики 7 и весоизмерительный датчик 17 блока 4 через компараторы 18 связаны с пГина- ми. 11 вычислительного блока 10,
Устройство работает следующим образом.
При отсутствии состава, подлежащего взвешиванию, весоизмерительные датчики :7 и 17 не нагружены н на выходах ЛБ, ПБ, СБ (Левый блок, Правый блок, Средний блок) компараторов 18 - нулевые сигналы.
Выходы ЛБ, ПБ и СБ постоянно опрашиваются процессором 12 по командам, записанным в ПЗУ 13, До идентификации направления движения при нулевых сигналах ЛБ, ПБ и СБ по командам процессора 12 аналого-цифровой преобразователь 9 периодически проводит измерения начальных (нулевых) сигналов датчиков 7, Коды, соответствующие начальным сигналам, через шины 11 передаются в ОЗУ 14 для хранения до очередного измерения начального уровня, В дальнейшем при измерении сигналов нагруженных датчиков 7 коды начальных сигналов вычитаются из текущих кодов, так что устройство оперирует с приращениями кодов, соответствующим нагружению блоков 2 и 3 наезжающими осями объектов.
Просмотр процессором 12 выходов ЛБ, ПБ, СБ проводится с частотой порядка нескольких килогерц, каждое разовое измерение аналого-цифрового преобразователя 9 занимает около
35
40
45
50
55
1
Ом с,а цикл измерения нулевого
5
у|ровня - около 0,8 с, причем преоб- р1азователь 9 опрашивает блоки 2 и 3 пЬочередно, Периодичность обновления кодов, соответствующих нулевым уровням датчиков 7, зависит от условий работы, состояния -подъездных п|утей, подвижного состава и должна проводиться, как правило, не чаще 1 раза в час.
При наезде первого колеса состава на блок 3 нагружается соответствующий датчик 7, срабатьшает подключенный к нему компаратор 18 и выход ЛБ принимает единичное значение.
Идентифицируется в данном случае правое направление движения, после чего процессор 12 не обращается к подпрограмме идентификации направления, записанной в ПЗУ 13, до того, как сформирована команда Общий сброс.
Подпрограмма ПЗУ 13 Измерение
1едусматри:9зет при наличии единичных
п
вькодов блоков 3 и 2 вьщачу преобразователю 9 команды на измерение сигнала весоизмерительных датчиков 7 и вьщачу полученных кодов в вычисли- Т|ельный блок 10,
I Вычислительный блок 10 обрабатыва- т поступающие на его вход коды по Одному иэ известных алгоритмов с целью подавления специфических помех динамического взвешивания.
Результат измерения И 1 по первой оси поступает по команде процессора 1)2 а ОЗУ 14 на хранение до получений р|езультатов по другим осям объекта, Результат по второй оси И 2 также по окончании измерения передан на хране- иие в ОЗУ 14,
По появлению сигнала ВС процессор 12 проводит сложение результатов и йередает массу первой тележки на хра- йение в ОЗУ 14, Кроме того, контроли- руется и запоминается, что сигнал ВС (;в данном случае) - нечетный. Взвешивание второй тележки проводится точно так же, но при появлении второго сиг- нала ВС контролируется его четность И сумма результатов измерения по всем четырем осям объекта помещается в ОЗУ 14 для хранения до окончания взвешивания состава или передается ч|ерез интерфейс 15 в регистрирующий прибор 16, взвешивание шестиосного И восьмиосного объ ектов проводят аналогично.
0
31
15
0
25
30
35
.„
-
796
При реверсе направления движения , работа происходит следующим образом.
Для выявления реверса в ПЗУ 13 записана подпрограмма Реверс, предусматривающая контроль чередований нагруженных (состояние 1) и свободных (О) блоков, т.е. наличие одиночных нулей и единиц, В соответствии с этим после наступления соответствующего состояния нагружения-раз- груженИя блоков 2-4 подпрограмма Реверс выявляет наступление первого реверса. После выявления реверса работа преобразователя 9 и обработка результатов вычислительным блоком 10 прекращаются и проводится подсчет числа нагружений-разгружений блоков 2-4 до следующего реверса. Например, если от первого до второго реверса имеет место четыре нагружения-разгру- жения (наезда-выезда), то после вто- taoro peBiepca отсчитывается также четыре нагружения-разгружения и при комбинации 1-1-1 продолжается обычная (описанная) работа устройства, Проводится второе измерение И 2 и при комбинации 0-0-0 (Весы свободны) суммирование первого и второго результатов, т.е., определение массы тележки И 1 + И 2. При многократных реверсах процедура запрета продолжается до тех пор, пока разность наездов-выездов в обратном и прямом направлениях N не становится равной нулю.
При продолжительном реверсе, т.е. когда частично взвешенная тележка полностью съезжает с блоков 2-4 и формируется комбинация 0-0-0 (Весы свободны), способ рекомендует погасить полученные результаты по частично взвешенной тележке и продолжать обработку результатов после того, как разность числа тележек, проехавших через блоки 2-4 в обратном и прямом направлениях, не становится равной нулю. Формула изобретения
Способ взвешивания подвижных объектов, включающий установку на железнодорожном пути весовой платформы из двух измерительных грузо- приемньо: блоков со сдвигом относительно друг друга, определение наг- ружений и разгруженнй грузоприемных блоков, преобразование выходных сигналов измерительных грузоприемных блоков и цифровые коды, обработку
71Д531
цифровых кодов и суммирование результатов обработки, отличающий- с я тем, что, с целью повышения точности, устанавливают третий измерительный грузоприемный блок, дополняющий общую длину ;ресовой платформы до величины, большей межосевого расстояния вагонов, но меньшей межосевого расстояния локомотивов, при этом Q
все измерительные грузоприемные блоки устанавливают относительно друг друга со сдвигом в направлении дви9 8
жеиия, при переменах направления движения состава формируют сигнал Реверс, по которому прекращают обработку цифровых кодов, запоминают результат суммирования и начинают фиксировать число выездов-наездов осей соответственно в обратном и прямом направлениях с определением разности числа выездов и наездов осей, а при достижении этой разностью нуля вновь возобновляют обработку цифровых кодов.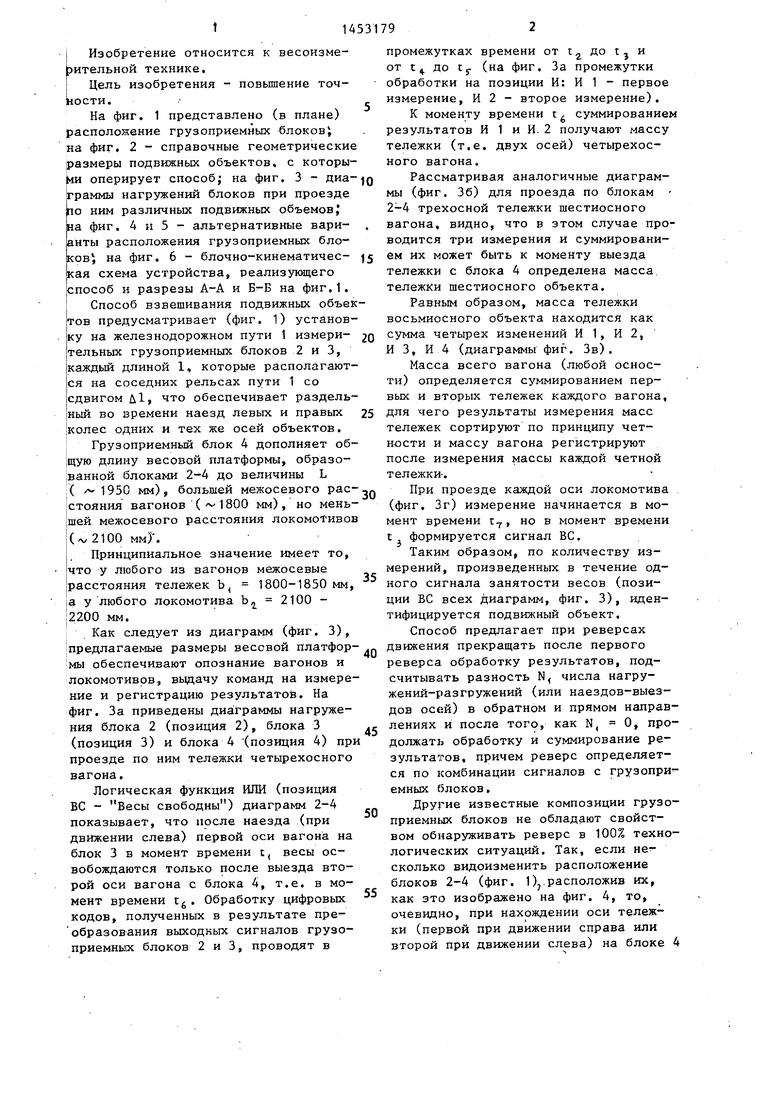
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Способ поколесного взвешивания подвижных объектов | 1986 |
|
SU1372194A1 |
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
Изобретение относится к весоизмерительной технике. С целью повьше- ния точности за счет исключения влияния на результат измерения реверсов подвижного состава дополнительно к двум грузоприемным блокам устанавливают третий грузоприемный блок. Причем общую длину трех блоков устанавливают большей межосевого расстояния вагонов, но меньшей межосевого расстояния локомотива и со сдвигом относительно друг друга, обеспечивающим раздельный наезд левых и правых колес. При переменах направления формируют сигнал Реверс, по которому прекращают обработку результатов, подсчитывают разность наездов-выездов осей в обратном и прямом направлениях и продолжают обработку и суммирование результатов измерения после того, как эта разность станет равной нулю. 6 ил. (Л
Фиг.1
-ОСНбШ
I Saeo/i
Фиг. 2
Осы
tZ ОсЫ
JL
1С
in- OcbZ
i9
Щ
3:
осы
осы
JL
I
W7
gf6/
1
c6 г
. Осы t
Ось 2
JL
; f-1 г П r-I f
t2
Фиг.д
Ai
0С62
OcbZ
L
f
BC
иг
Ось 2
,.5
//
i
4
осьз
сь 2
пi:
Ос 6 2
r
i/2
J
( J
f
//
Q
«:i
i
ча
3L
Ll
ОсьЗ
WbJ
- §
ц .
Cu5
gC6
- 5
Bt g - Q
и 5
;
Фиг.
CS
Редактор И.Бланар
Заказ 7269/34Тираж 660Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг, 5
Л6
ЛБ
Техред А.Кравчук КорректорМ.Демчик
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
