Изобретение относится к устройствам железнодорожной автоматики и телемеханики и может быть использовано для контроля заполнения участков пути и контроля прибытия поезда на станцию в полном составе.
Известно устройство для определения длины поезда, содержащее на пункте контроля подключенный к рельсовой цепи датчик проследования состава и аналого-цифровой преобразователь (см. авторское свидетельство СССР №1379169, кл. B 61 L 1/16, 1986).
Недостатком устройства является недостаточная точность определения длины поезда.
Из известных устройств наиболее близким является устройство для контроля местоположения локомотива, содержащее на пункте контроля подключенный к рельсу датчик положения состава, подключенный к первому информационному входу микрокомпьютера, соединенному через радиомодем с радиостанцией с антенной, а на локомотиве радиостанцию с антенной (см. патент России №2063349, кл. B 61 L 23/16, 1993).
Недостатком устройства является отсутствие возможности его использования для контроля свободности участков пути и прибытия поезда на станцию в полном составе.
Сущность заявленного изобретения состоит в определении длины поезда на пункте контроля посредством определения приращения координат между датчиком положения состава в момент его пересечения последней осью замыкающего вагона поезда и антенной приемника радионавигационных сигналов спутниковых радионавигационных систем (СРНС) ГЛОНАСС (Ураган) /GPS (Navstar) (далее по тексту спутниковая навигационная антенна) локомотива с учетом вносимой поправки в координаты спутниковой антенны локомотива, вырабатываемой опорным приемником радионавигационных сигналов СРНС ГЛОНАСС/GPS (далее по тексту спутниковый навигационный приемник) пункта контроля, для целей контроля свободности участков пути и прибытия поезда в полном составе с учетом условия, что вышедшая и вымеренная длины поезда равны между собой.
Сравнение заявленного технического решения с прототипом позволило установить его соответствие критерию новизна, так как оно не известно из уровня техники.
Предложенное устройство является промышленно применимым и существующими техническими средствами соответствует критерию изобретательский уровень, т.к. оно явным образом не следует из уровня техники.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Задачей изобретения является повышение точности определения длины поезда на пункте контроля при количестве вагонов не более 56, имеющих минимальное расстояние между первой автосцепкой и последней колесной парой используемых подвижных единиц не менее 10,5 м, с точностью не хуже 5,25 м для однозначной идентификации полносоставности проследования участка пути поездом.
Технический результат достигается за счет использования спутниковых навигационных приемников СРНС ГЛОНАСС/GPS, интегрированных в устройства автоматической локомотивной сигнализации.
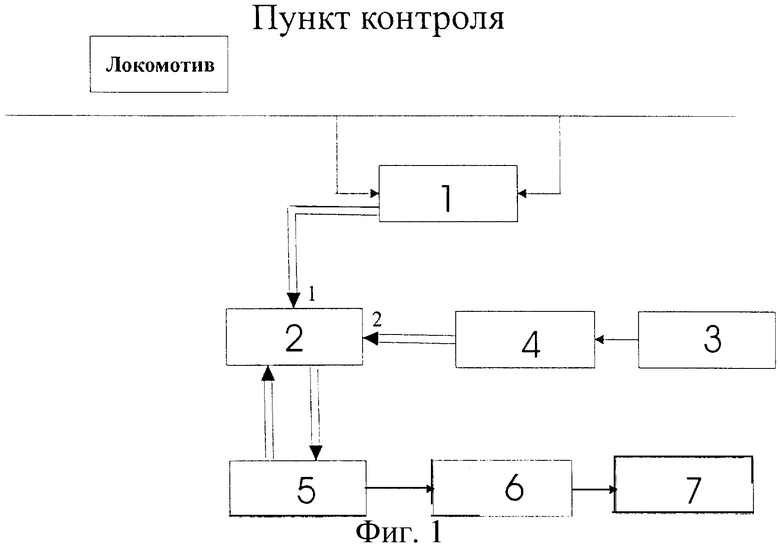
На фиг. 1 приведена функциональная схема построения пункта контроля устройства для определения длины поезда.
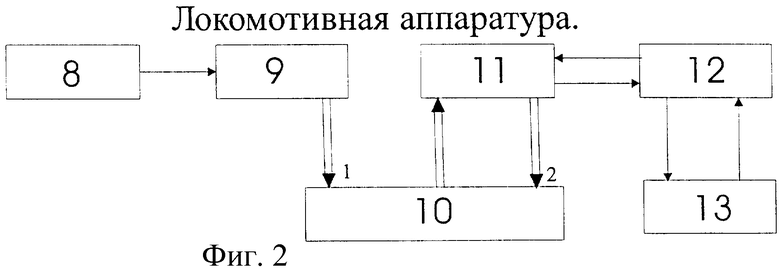
На фиг. 2 приведена функциональная схема локомотивной аппаратуры устройства для определения длины поезда.
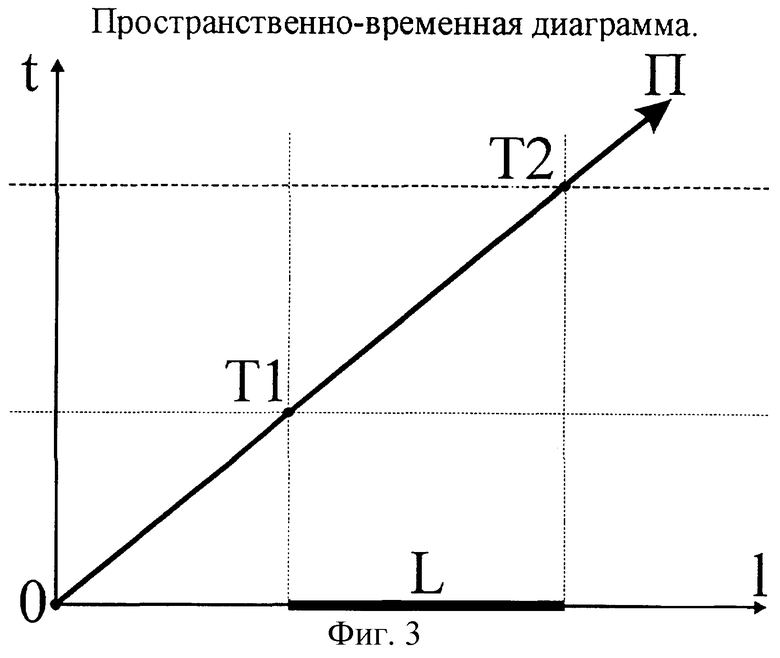
На фиг. 3 приведена пространственно-временная диаграмма, иллюстрирующая работу устройства для определения длины поезда.
Пункт контроля содержит подключенный к рельсу датчик положения состава 1, выход которого подключен к первому информационному входу первого микрокомпьютера 2, спутниковую навигационную антенну 3, соединенную со спутниковым навигационным приемником 4, выход которого подключен ко второму информационному входу первого микрокомпьютера 2, соединенного через цифровой радиомодем 5 с радиостанцией 6 с радиоантенной 7. Электропитание пункта контроля осуществляется от внешних источников электроснабжения, напряжение от которых поступает на вторичный источник питания, который преобразует напряжение от внешних источников электроснабжения в необходимый каждому блоку пункта контроля уровень напряжения питания. Конструктивно пункт контроля выполнен в виде семи блоков. Все блоки выполнены на современной элементной базе. Программное обеспечение первого микрокомпьютера создано на языке программирования C++ под операционную систему MsDOS.
Локомотивная аппаратура содержит спутниковую навигационную антенну 8, соединенную со спутниковым навигационным приемником 9, выход которого подключен к первому информационному входу второго микрокомпьютера 10, второй информационный вход которого соединен через цифровой радиомодем 11 с радиостанцией 12 с радиоантенной 13. Электропитание локомотивной аппаратуры осуществляется от бортовой сети локомотива, напряжение от которой поступает на вторичный источник питания, который преобразует напряжение бортовой сети в необходимый каждому блоку уровень напряжения питания. Конструктивно локомотивная аппаратура выполнена в виде шести блоков в корпусах, предназначенных для монтажа на локомотив. Все блоки выполнены на современной элементной базе. Программное обеспечение второго микрокомпьютера создано на языке программирования C++ под операционную систему MsDOS.
Пространственно-временная диаграмма (фиг.3) показывает, как изменяется положение поезда во времени. Пространственная координата 1 увеличивается вправо, а временная координата t - в направлении вверх от начала координат 0. Линия ОП - мировая линия поезда П, представляющая его историю. Точки Т1 и Т2 на линии ОП соответствуют моментам вступления на участок пути первой колесной пары локомотива и последней колесной пары замыкающего вагона поезда длиной L соответственно.
Работа устройства происходит следующим образом.
Координаты датчика положения состава 1 зашиваются во второй микрокомпьютер 10, координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4 зашиваются в первый микрокомпьютер 2. Моменты вступления первой колесной пары локомотива Т1 и последней колесной пары замыкающего вагона поезда Т2 на датчик положения состава 1 передаются через первый информационный вход в первый микрокомпьютер 2 и фиксируются. Спутниковый навигационный приемник 4 ежесекундно производит прием электромагнитных сигналов от навигационных искусственных спутников Земли (НИСЗ) ГЛОНАСС/GPS посредством спутниковой навигационной антенны 3, вырабатывает и передает навигационно-геодезическую информацию в первый микрокомпьютер 2 через второй информационный вход для выработки мгновенных координат спутниковой навигационной антенны 3 спутникового навигационного приемника 4 в общеземной системе координат и корректирующей поправки в координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4.
Спутниковый навигационный приемник 9 локомотива ежесекундно производит прием электромагнитных сигналов от НИСЗ ГЛОНАСС/GPS посредством спутниковой навигационной антенны 8, обрабатывает и передает навигационно-геодезическую информацию во второй микрокомпьютер 10 через первый информационный вход для выработки мгновенных координат спутниковой навигационной антенны 8 спутникового навигационного приемника 9 в общеземной системе координат.
После выхода поезда из зоны контроля датчика положения 1 на первый информационный вход первого микрокомпьютера 2 поступает информация о выходе поезда из зоны контроля датчика положения состава 1 и первый микрокомпьютер 2 осуществляет передачу через радиомодем 5, радиостанцию 6 и радиоантенну 7 на локомотив информацию о времени вступления первой колесной пары головы локомотива поезда Т1 и последней колесной пары замыкающего вагона состава Т2 на датчик положения состава 1, а также корректирующие поправки в координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4 на данные моменты.
На локомотиве через радиоантенну 13, радиостанцию 12 и радиомодем 11 второй микрокомпьютер 10 получает переданную информацию с пункта контроля, поступающую на второй информационный вход второго микрокомпьютера 10. С учетом принятых от пункта контроля корректирующих поправок в мгновенные координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4 второй микрокомпьютер 10 вырабатывает координаты спутниковой навигационной антенны 8 локомотива на момент вступления первой колесной пары головы локомотива Т1 и последней колесной пары замыкающего вагона состава Т2 на датчик положения состава 1. Если координаты головы локомотива в момент вступлении в зону контроля датчика положения состава 1 равняются координатам датчика положения состава 1 с точностью не хуже 1 м, то устройство считается работоспособным и во втором микрокомпьютере 10 происходит вычисление координат спутниковой навигационной антенны 8 локомотива на момент прохода последней колесной парой замыкающего вагона датчика положения состава 1.
Приращение координат спутниковой навигационной антенны 8 локомотива относительно датчика положения состава 1 в момент прохода последней колесной парой замыкающего вагона датчика положения состава 1 дает истинную длину состава L. Измерение длины состава происходит при выходе поезда из зоны контроля датчика положения состава 1. Измеренная длина состава по каналу PC передается на станцию в систему полуавтоматической блокировки. Участок пути считается свободным, если вышедшая и вымеренная длины состава равны между собой.
При движении состава в обратном направлении (вагонами вперед) принцип работы устройства для определения длины поезда тот же.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| УСТРОЙСТВО БОРТОВОЙ АППАРАТУРЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411153C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ЛОКОМОТИВА | 2008 |
|
RU2400386C2 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
Изобретение относится к железнодорожной автоматике и телемеханике и предназначено для использования при контроле свободности участков пути и прибытия поезда на станцию в полном составе. На пункте контроля подключен к рельсу датчик положения состава. Его выход подключен к одному из информационных входов первого микрокомпьютера, соединенного через радиомодем с радиостанцией. На локомотиве имеется радиостанция, подключенная через радиомодем к одному из информационных входов второго микрокомпьютера. Отличительная особенность устройства заключается в том, что на пункте контроля и на локомотиве установлены спутниковые навигационные антенны, соединенные соответственно через первый и второй спутниковые навигационные приемники с другими информационными входами соответственно первого и второго микрокомпьютеров. Изобретение позволяет повысить точность определения длины поезда для однозначной идентификации полносоставности проследования участка пути поездом. Функциональные возможности устройства расширены за счет использования одночастотных спутниковых приемников спутниковых радионавигационных систем, интегрированных в устройства автоматической локомотивной сигнализации. 2 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЛОКОМОТИВА | 1993 |
|
RU2063349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ПОЕЗДОВ | 1997 |
|
RU2145423C1 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| СИСТЕМА ИНДИКАЦИИ ПОЛОЖЕНИЯ | 1992 |
|
RU2108627C1 |

