Изобретение относится к радиолокации и может быть использовано в системах измерения параметров движения наземных (надводных) источников радиоизлучений (ИРИ) с помощью пассивной однопозиционной радиолокационной станции.
Известен способ определения дальности до наземного, мобильного ИРИ и скорости сближения с ним [1], использующий метод Мейна, представляющий алгоритм линейной фильтрации, в котором оцениваются значения компонент вектора параметров модели состояния, а не значения компонент вектора состояния.
Согласно способу на борту летательного аппарата (ЛА) измеряется в нормальной земной системе координат (НЗСК) текущее местоположение ЛА (хла, ула, zла), угловое положение ЛА (ϑ, ψ) - тангаж и угол рыскания, вертикальное и горизонтальное ускорение ЛА (jв, jг), пассивная радиолокационная станция (ПРЛС) принимает радиосигналы от ИРИ, по которым с учетом (ϑ, ψ) измеряют значения (φг, φв) - пеленгов ИРИ в горизонтальной и вертикальной плоскостях, соответственно.
На первом, предварительном, этапе в момент времени (k-2) измеряют ϑ(k-2) - тангаж, ψ(k-2) - угол рыскания, ула(k-2) - высоту ЛА, значения φг(k-2), φв(k-2) - пеленгов ИРИ в горизонтальной и вертикальной плоскостях. Измеренные значения ϑ(k-2), ψ(k-2), ула(k-2), φг(k-2), φв(k-2) запоминают. В следующий момент времени (k-1), отстоящий от момента времени (k-2) на τ - интервал дискретизации, измеряют значения высоты ула(k-1) ЛА, его тангажа ϑ(k-1), угла рыскания ψ(k-1), поперечных ускорений jг(k-1), jв(k-1) ЛА в горизонтальной и вертикальной плоскостях, принимают радиосигналы от ИРИ, по которым измеряют значения пеленгов φг(k-1), φв(k-1) ИРИ и угловых скоростей линии визирования ωг(k-1), ωв(k-1) ИРИ в горизонтальной и вертикальной плоскостях, соответственно. Измеренные значения ула(k-1), ϑ(k-1) и ψ(k-1) запоминают, измеренные значения φг(k-1), ωг(k-1), jг(k-1), φв(k-1), ωв(k-1) и jв(k-1) запоминают как значения соответствующих компонент вектора параметров состояния ИРИ Rири(k-1)=[φг(k-1), ωг(k-1), jг(k-1), φв(k-1), ωв(k-1), jв(k-1)]T.
По запомненным в (k-2)-й и (k-1)-й моменты времени значениям высоты ула, пеленга φв и тангажа ϑ вычисляют приблизительные значения дальности до ИРИ Дири(k-2) и Дири(k-1). По вычисленным значениям дальности Дири(k-2) и Дири(k-1), интервалу между измерениями τ и запомненным в (k-2)-й и (k-1)-й моменты времени значениям φг, φв, ϑ и ψ вычисляют приблизительные значения проекций скорости сближения ЛА с ИРИ Vусб(k-1), Vzсб(k-1) и Vхсб(k-1) на оси Y, Z и X НЗСК, соответственно. По найденным проекциям вычисляют приблизительную скорость сближения ЛА с ИРИ Vсб.
Дисперсии ошибок измерений пеленгов ИРИ  угловых скоростей линии визирования ИРИ
угловых скоростей линии визирования ИРИ  поперечных ускорений ЛА
поперечных ускорений ЛА  в горизонтальной и вертикальной плоскостях запоминают в виде значений соответствующих компонент диагональной матрицы шумов (погрешностей) измерений Dи.
в горизонтальной и вертикальной плоскостях запоминают в виде значений соответствующих компонент диагональной матрицы шумов (погрешностей) измерений Dи.
По значениям дальности Дири(k-1) и скорости сближения Vсб(k-1) ЛА с ИРИ вычисляют переходную матрицу вектора состояния Ф(k,k-1) размером n*n, компоненты которой ƒij(k,k-1) представляют собой функции, посредством которых координаты φг, ωг, jг, φв, ωв и jв вектора состояния Rири связаны с Дири и Vcб.
По запомненным значениям компонент вектора состояния Rири(k-1) и переходной матрице вектора состояния Ф(k,k-1) осуществляют экстраполяцию на k-й момент времени всех значений компонент вектора состояния по формуле:
Rэири(k)=Ф(k,k-1)Rири(k-1).
Спрогнозированные значения компонент вектора Rэири(k)=[φг(k), ωг(k), jг(k), φв(k), ωв(k), jв(k)]T запоминают.
Из компонент ƒij(k,k-1) матрицы Ф(k,k-1) формируют вектор параметров модели состояния  Значениям координат
Значениям координат  вектора
вектора  присваиваются значение ƒij (k,k-1) по выражению:
присваиваются значение ƒij (k,k-1) по выражению:

Для учета начальных и впоследствии текущих оценок оценивания значений компонент вектора формируют и запоминают матрицу D(k-1) апостериорных дисперсий и взаимных дисперсий ошибок оценивания вектора параметров вектора модели состояния
Исходя из априорных сведений о корреляционных функциях распределения значений плотности вероятности соответствующих компонент вектора состояния Rири(1), для учета отсутствия точных данных о движении ИРИ строят и запоминают диагональную матрицу шумов вектора состояния DR, диагональные компоненты которой задают, исходя из конкретной структуры вектора Rири(1) и априорных сведений о корреляционных функциях распределения значений плотности вероятности его компонент.
По запомненным значениям компонент вектора Rэири(k) формируют и запоминают соответствующие значения компонент переходной матрицы вектора параметров модели состояния М(k) для следующего k-го шага вычислений по формуле:
где 0 - n-мерные нулевые векторы.
На втором, основном, этапе, начиная с момента времени k, измеряют значения jг, jв, а также принимают радиосигналы от ИРИ, по которым измеряют значения φг, φв, ωг и ωв, измеренные значения φг, ωг, jг, φв, ωв и jв запоминают в виде значений соответствующих компонент вектора измерений z(k)=[φги(k), ωги(k), jги(k), φви(k), ωви(k), jви(k)]T;
По запомненным значениям матриц D(k-1), DR, М(k) вычисляют текущее значение матрицы D(k):

По запомненным значениям матриц Dи, М(k) и D(k) вычисляют и запоминают матричный коэффициент усиления K(k):

Оценивают текущие значения компонент вектора модели состояния 

Формируют следующую переходную матрицу вектора состояния Ф(k+1, k), компонентам которой ƒij(k+1, k) присваивают значения координат вектора  по выражению:
по выражению:

Вычисляют дальность до ИРИ Дири(k) и скорость сближения с ним Vсб(k) по формулам 
Выдают потребителю вычисленные значения дальности до ИРИ Дири(k) и скорости сближения с ним Vсб(k);
По значениям компонент вектора Rири(k) и матрицы Ф(k+1,k) вычисляют и запоминают значения компонент вектора Rэири(k+1) на следующий (к+1)-й шаг измерений;
По значениям компонент вектора Rэири(k+1) формируют и запоминают значения компонент матрицы М(k+1) для следующего шага измерений. Далее, описанный выше процесс, начиная со второго этапа, повторяют.
Недостатком способа [1] является существенная зависимость точности определения дальности до ИРИ и скорости сближения с ним от вида и параметров траектории взаимного перемещения ЛА и ИРИ. Наибольшая точность определения достигается при высоких угловых скоростях линии визирования, что имеет место при пеленгах цели относительно вектора скорости ЛА, близких к 90°. На больших дальностях до цели угловая скорость линии визирования, как правило, имеет малое значение, поэтому точность определения оказывается недостаточной для эффективного наведения ЛА.
Прототипом и наиболее близким по технической сущности к заявляемому способу является способ определения дальности до наземного (надводного) движущегося ИРИ и скорости сближения с ним [2, С. 332-340], заключающийся в том, что на борту ЛА в НЗСК измеряется текущее местоположение ЛА (xла, ула, zла), тангаж и угол рыскания ЛА (ϑ, ψ), вертикальное и горизонтальное ускорение ЛА (jв, jг). ПРЛС принимает радиосигналы от ИРИ, измеряют значения (φг, φв) - пеленгов ИРИ в связанной с осями ЛА системе координат, преобразуют их с учетом углов (ϑ, ψ) в углы визирования ИРИ (εги, εви) в горизонтальной и вертикальной плоскостях НЗСК, соответственно.
На первом, предварительном, этапе в момент времени tk-1 измеренные координаты ЛА хла(k-1), ула(k-1), zла(k-1) и углов визирования ИРИ в горизонтальной εги(k-1) и вертикальной εви(k-1) плоскостях запоминают. Дисперсии погрешностей измерений углов визирования ИРИ  запоминают в виде компонент корреляционной матрицы погрешностей наблюдений
запоминают в виде компонент корреляционной матрицы погрешностей наблюдений 
По запомненным значениям измеренных координат ЛА {хла(k-1), ула(k-1), zла(k-1)} и углам визирования ИРИ {εги(k-1), εви(k-1)} вычисляют начальные оценки прямоугольных координат источника радиоизлучений  в НЗСК.
в НЗСК.
По априорной информации о типе носителя ИРИ вычисляют начальные оценки скорости  и ускорения
и ускорения  ИРИ по осям х и z НЗСК.
ИРИ по осям х и z НЗСК.
Сформированные оценки прямоугольных координат и параметров движения ИРИ запоминают в виде соответствующих компонент вектора оценок параметров состояния ИРИ 
 где символ «Т» определяет операцию транспонирования. Дисперсии и корреляционные моменты ошибок соответствующих оценок параметров состояния ИРИ запоминают в виде компонент корреляционной матрицы ошибок оценивания R(k-1).
где символ «Т» определяет операцию транспонирования. Дисперсии и корреляционные моменты ошибок соответствующих оценок параметров состояния ИРИ запоминают в виде компонент корреляционной матрицы ошибок оценивания R(k-1).
С использованием вектора оценок параметров состояния ИРИ рассчитывают экстраполированные на следующий tk момент времени оценки параметров состояния по формуле

где  - вектор экстраполированных оценок параметров состояния ИРИ;
- вектор экстраполированных оценок параметров состояния ИРИ;
 - экстраполированные прямоугольные координаты ИРИ;
- экстраполированные прямоугольные координаты ИРИ; 
 - экстраполированные проекции векторов скорости и ускорения движения ИРИ на соответствующие оси НЗСК;
- экстраполированные проекции векторов скорости и ускорения движения ИРИ на соответствующие оси НЗСК;
Ф(k,k-1) - фундаментальная матрица, связывающая вектор экстраполированных оценок параметров состояния ИРИ  с предшествующей оценкой вектора состояния
с предшествующей оценкой вектора состояния 
Рассчитывают дисперсии и корреляционные моменты ошибок экстраполированных оценок параметров состояния ИРИ по формуле

где  - корреляционная матрица ошибок экстраполяции;
- корреляционная матрица ошибок экстраполяции;
Dx - корреляционная матрица шумов состояния;
Компоненты вектора экстраполированных оценок параметров состояния ИРИ  и корреляционной матрицы ошибок экстраполяции
и корреляционной матрицы ошибок экстраполяции  запоминают.
запоминают.
На втором основном этапе, в момент времени измеряют собственные прямоугольные координаты ЛА хла(k), ула(k), zла(k), проекции вектора его скорости на оси НЗСК Vлах(k), Vлау(k), Vлаz(k) и принимают радиосигналы от ИРИ, по которым формируют измерения углов визирования εги(k) и εви(k). Измеренные значения углов визирования запоминают в виде компонент вектора наблюдений Z(k)=[εги(k)εви(k)]Т.
По измеренным значениям координат ЛА и запомненному вектору экстраполированных оценок параметров состояния ИРИ рассчитывают компоненты вектора экстраполированных наблюдений  и матрицы пересчета
и матрицы пересчета  изменений вектора состояния
изменений вектора состояния  в изменения вектора наблюдений
в изменения вектора наблюдений 
С использованием рассчитанных компонент матрицы связи наблюдений с параметрами состояния ИРИ, а также запомненных корреляционных матриц ошибок экстраполяции и погрешностей наблюдений рассчитывают компоненты матрицы коэффициентов усиления невязок по формуле:

здесь символ «-1» определяет операцию обращения матрицы.
По запомненным векторам экстраполированных оценок параметров состояния ИРИ, наблюдений и экстраполированных наблюдений, а также матрицы коэффициентов усиления невязок рассчитывают вектор оценок параметров состояния ИРИ по формуле:

По запомненным корреляционной матрице ошибок экстраполяции, матрице коэффициентов усиления невязок и матрице связи наблюдений с параметрами состояния ИРИ рассчитывают корреляционную матрицу ошибок оценивания по формуле:

где I - единичная матрица размером 6×6.
По оцененным значениям координат и скорости ИРИ 
 измеренным значениям координат ЛА хла(k), ула(k), zла(k), и проекций его скорости Vлах(k), Vлаy(k), Vлаz(k) определяют наклонную дальность до ИРИ
измеренным значениям координат ЛА хла(k), ула(k), zла(k), и проекций его скорости Vлах(k), Vлаy(k), Vлаz(k) определяют наклонную дальность до ИРИ  и скорость сближения с ним
и скорость сближения с ним 
Компоненты вектора оценок параметров состояния ИРИ  и корреляционной матрицы ошибок оценивания R(k) запоминают. Далее описанный процесс, начиная со второго этапа, повторяют.
и корреляционной матрицы ошибок оценивания R(k) запоминают. Далее описанный процесс, начиная со второго этапа, повторяют.
К недостаткам описанного метода относится существенное снижение точности определения координат и параметров движения ИРИ при малых угловых скоростях линии визирования, соединяющей ЛА и ИРИ.
Целью изобретения является повышение точности ПРЛС в определении дальности и скорости сближения с наземным или надводным мобильным ИРИ на дистанциях, соизмеримых с дальностью его обнаружения, когда угловая скорость линии визирования мала.
Указанный результат достигается квазилинейной косвенной фильтрацией вектора состояния цели, включением в вектор наблюдаемых параметров ИРИ, кроме углов визирования цели, мощности сигнала ИРИ на выходе линейной части приемника ПРЛС, в число фильтруемых параметров вектора состояния ИРИ кроме координат, скорости и ускорения ИРИ добавляется энергетический параметр ИРИ.
Связь между мощностью сигнала ИРИ на выходе линейной части приемника ПРЛС Рпрм и энергетическим параметром ИРИ Пири определяется уравнением пассивной радиолокации [3, с. 203]:



где Рири - мощность радиосигналов ИРИ;
Gири - коэффициент усиления антенны ИРИ;
Gpлс - коэффициент усиления антенны ПРЛС;
λ - длина волны радиосигналов ИРИ;
αΣ - суммарный коэффициент потерь;
Δƒрлс - ширина полосы пропускания приемника ПРЛС;
Δƒири - ширина спектра радиосигнала ИРИ;
W - коэффициент пропорциональности.
Наблюдаемый энергетический параметр ИРИ изменяется при изменении параметров сигналов, излучаемых ИРИ, и пространственной ориентации диаграммы направленности его антенны. Априорная неопределенность значений энергетического параметра ИРИ устраняется путем его оценивания совместно с оцениванием координат и параметров движения ИРИ. Для этого используется упрощенная математическая модель изменения во времени энергетического параметра в виде дифференциального уравнения

где αп - величина, обратная интервалу корреляции процесса изменения энергетического параметра по времени;
П0 - среднее значение энергетического параметра, априорно, равное 

 - дисперсия процесса изменения энергетического параметра;
- дисперсия процесса изменения энергетического параметра;
nп - стандартный белый гауссовский шум.
Указанному дифференциальному уравнению соответствует разностное уравнение

Выбор параметров αр, П0 и  основывается на анализе математического ожидания и корреляционной функции процесса изменения энергетического параметра ИРИ конкретного типа.
основывается на анализе математического ожидания и корреляционной функции процесса изменения энергетического параметра ИРИ конкретного типа.
Предлагаемый способ работы ПРЛС на борту ЛА включает
измерение в нормальной земной системе координат (НЗСК) в tk момент времени координат ЛА хла(k), ула(k), zла(k), горизонтальных составляющих скорости ЛА Vла х(k), Vла у(k), Vла z(k), углов тангажа и рыскания ЛА ϑ(k), ψ(k);
прием ПРЛС радиосигналов от ИРИ, по которым измеряют пеленги ИРИ в связанной с ЛА системе координат;
расчет значений наблюдаемых углов визирования ИРИ εги(k) и εви(k) в горизонтальной и вертикальной плоскостях НЗСК с учетом углов крена и тангажа ϑ(k), ψ(k), соответственно,
запоминание наблюдаемых углов визирования в виде координат вектора наблюдений Z(k)=[εги(k)εви(k)]T;
назначение фильтруемых координат вектора оценки параметров состояния ИРИ  где
где  - горизонтальные координаты ИРИ в НЗСК,
- горизонтальные координаты ИРИ в НЗСК,  - горизонтальные координаты вектора скорости ИРИ в НЗСК,
- горизонтальные координаты вектора скорости ИРИ в НЗСК,  - горизонтальные координаты вектора ускорений ИРИ в НЗСК;
- горизонтальные координаты вектора ускорений ИРИ в НЗСК;
расчет начальных координат вектора оценки состояния ИРИ  по начально измеренным координатам ЛА, углам визирования ИРИ и априорным данным о скорости и ускорении идентифицированного ИРИ;
по начально измеренным координатам ЛА, углам визирования ИРИ и априорным данным о скорости и ускорении идентифицированного ИРИ;
назначение начального вектора экстраполяции наблюдений  равным начальному вектору наблюдений Z(0);
равным начальному вектору наблюдений Z(0);
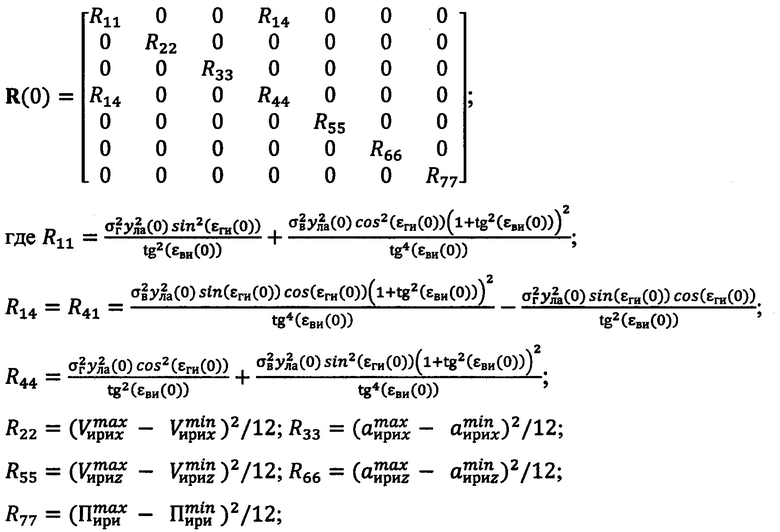
расчет корреляционной матрицы вектора оценки состояния ИРИ R(0) по априорно известным дисперсиям измерения углов визирования ИРИ, начальным координатам ЛА, начально измеренным углам визирования ИРИ, априорным данным о диапазоне скоростей и ускорений идентифицированного ИРИ;
назначение матрицы шумов наблюдения Dz по априорно известным дисперсиям измерения углов визирования ИРИ;
расчет корреляционной матрицы шумов вектора оценки состояния ИРИ Dx по априорным данным о дисперсиях оценок координат и коэффициентам маневренности ИРИ,
расчет текущего вектора оценки состояния ИРИ  по алгоритму квазилинейной косвенной фильтрации в последовательности:
по алгоритму квазилинейной косвенной фильтрации в последовательности:
расчет вектора экстраполированных оценок состояния ИРИ  в следующий момент времени по результатам оценки предшествующего вектора оценки состояния ИРИ
в следующий момент времени по результатам оценки предшествующего вектора оценки состояния ИРИ  по формуле
по формуле

где Ф(k,k-1) - фундаментальная матрица, связывающая вектор оценки состояния ИРИ в tk-1 момент времени с вектором экстраполяции его значения в следующий момент времени tk=tk-1+Т;
расчет корреляционной матрицы ошибок экстраполированных оценок состояния ИРИ  по предшествующему значению корреляционной матрицы вектора оценки состояния ИРИ R(k-1) и корреляционной матрице шумов вектора оценки состояния ИРИ Dx в соответствии с формулой
по предшествующему значению корреляционной матрицы вектора оценки состояния ИРИ R(k-1) и корреляционной матрице шумов вектора оценки состояния ИРИ Dx в соответствии с формулой

расчет текущего вектора оценки состояния ИРИ  по формуле
по формуле


где K(k) - матрица коэффициентов усиления невязок;
 - вектор экстраполированных наблюдений;
- вектор экстраполированных наблюдений;
Н(k) - матрица пересчета изменений вектора экстраполированной оценки состояния ИРИ в изменения вектора экстраполированных наблюдений;
Dz - корреляционная матрица дисперсий вектора наблюдения; расчет корреляционной матрицы ошибок вектора оценок состояния ИРИ по формуле 
расчет наклонной дальности ИРИ  и скорости сближения с ним
и скорости сближения с ним  по координатам вектора оценки состояния ИРИ
по координатам вектора оценки состояния ИРИ  измеренным значениям координат ЛА xла(k), yла(k), zла(k) и проекций его скорости Vлах(k), Vлay(k), Vлаz(k) по формулам:
измеренным значениям координат ЛА xла(k), yла(k), zла(k) и проекций его скорости Vлах(k), Vлay(k), Vлаz(k) по формулам:
отличается тем, что при каждом наблюдении ИРИ дополнительно измеряют мощность Рпрм и(k) радиосигналов ИРИ на выходе линейной части приемника ПРЛС, включают ее значение в вектор наблюдения Z(k)=[εги(k)εги(k)Рпрм и(k)]Т, включают экстраполированное значение мощности радиосигнала на выходе линейной части приемника ПРЛС  в вектор экстраполированных наблюдений
в вектор экстраполированных наблюдений  включают в вектор экстраполированных оценок состояния ИРИ
включают в вектор экстраполированных оценок состояния ИРИ  экстраполированное значение энергетического параметра
экстраполированное значение энергетического параметра  включают в вектор оценки параметров состояния ИРИ
включают в вектор оценки параметров состояния ИРИ  оценку энергетического параметра
оценку энергетического параметра  под энергетическим параметром Пири понимается произведение
под энергетическим параметром Пири понимается произведение  где Рири - мощность сигнала, излучаемого ИРИ, Gири - коэффициент усиления антенны ИРИ в направлении на ПРЛС, Δƒири - ширина спектра сигнала ИРИ, новые записи координат векторов экстраполированной оценки состояния ИРИ и оценки вектора состояния ИРИ
где Рири - мощность сигнала, излучаемого ИРИ, Gири - коэффициент усиления антенны ИРИ в направлении на ПРЛС, Δƒири - ширина спектра сигнала ИРИ, новые записи координат векторов экстраполированной оценки состояния ИРИ и оценки вектора состояния ИРИ  имеют вид
имеют вид  определяют координаты начального значения вектора оценки состояния ИРИ
определяют координаты начального значения вектора оценки состояния ИРИ  в соответствии с начальными координатами ЛА, начальными углами визирования ИРИ, априорными данными скорости, ускорения и энергетического параметра ИРИ по формулам:
в соответствии с начальными координатами ЛА, начальными углами визирования ИРИ, априорными данными скорости, ускорения и энергетического параметра ИРИ по формулам:
верхний индекс «min» и «max» в обозначениях скорости Vири, ускорения аири и энергетического параметра Пири ИРИ указывает на минимальное и максимальное значение соответствующего параметра по априорным данным идентифицированного ИРИ и его носителя;
начальное значение вектора экстраполяции наблюдения  устанавливают равным наблюдаемому вектору:
устанавливают равным наблюдаемому вектору: 
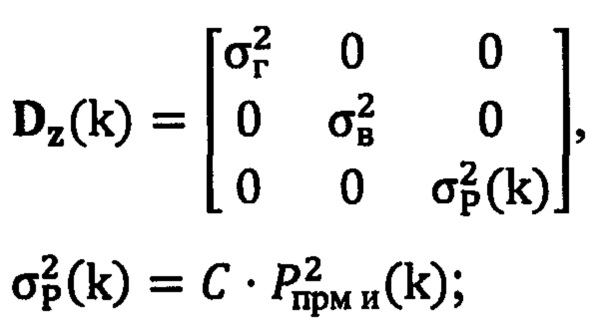
значение априорной матрицы шумов наблюдения Dz заменяют на обновляемую при каждом измерении матрицу Dz(k), начальное значение которой вычисляют по выражению
 - начальное значение дисперсии шумов измерения мощности сигнала ИРИ на выходе приемника ПРЛС, С - константа, значение которой определяется в процессе калибровки ПРЛС,
- начальное значение дисперсии шумов измерения мощности сигнала ИРИ на выходе приемника ПРЛС, С - константа, значение которой определяется в процессе калибровки ПРЛС,  - априорно известные дисперсии измерения углов визирования ИРИ;
- априорно известные дисперсии измерения углов визирования ИРИ;
размер корреляционной матрицы шумов вектора оценки состояния Dx увеличен, на основании априорных данных о ИРИ ее начальное значение рассчитывают по формуле
где  - дисперсия изменения энергетического параметра, задается исходя из априорных сведений о типе ИРИ;
- дисперсия изменения энергетического параметра, задается исходя из априорных сведений о типе ИРИ;  - дисперсии шумов ускорений ИРИ по соответствующим осям НЗСК, αх и αz - коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ, αп - величина, обратная интервалу корреляции процесса изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ;
- дисперсии шумов ускорений ИРИ по соответствующим осям НЗСК, αх и αz - коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ, αп - величина, обратная интервалу корреляции процесса изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ;
размер корреляционной матрицы ошибок вектора оценки состояния ИРИ R(k) увеличен и ее начальное значение R(0) определяется выражением
 - максимальное и минимальное значения априорной скорости ИРИ;
- максимальное и минимальное значения априорной скорости ИРИ;
 - максимальное и минимальное значения априорного ускорения ИРИ;
- максимальное и минимальное значения априорного ускорения ИРИ;
 - максимальное и минимальное значения априорного значения энергетического параметра ИРИ;
- максимальное и минимальное значения априорного значения энергетического параметра ИРИ;
вектор экстраполированной оценки состояния ИРИ рассчитывается как сумма двух векторов, первого равного произведению фундаментальной матрицы Ф(k-1,k) на вектор оценки предшествующего состояния ИРИ  второго А, характеризующего флуктуацию энергетического параметра около среднего значения, формула оценки
второго А, характеризующего флуктуацию энергетического параметра около среднего значения, формула оценки  имеет вид
имеет вид

где  - среднее значение энергетического параметра;
- среднее значение энергетического параметра;
размер фундаментальной матрицы Ф(k,k-1), матрицы коэффициентов усиления невязок К(k) и корреляционной матрицы ошибок вектора экстраполяции оценки состояния ИРИ  увеличен и стал равным 7*7,
увеличен и стал равным 7*7,
значение фундаментальной матрицы Ф(k,k-1), вычисляется по выражению
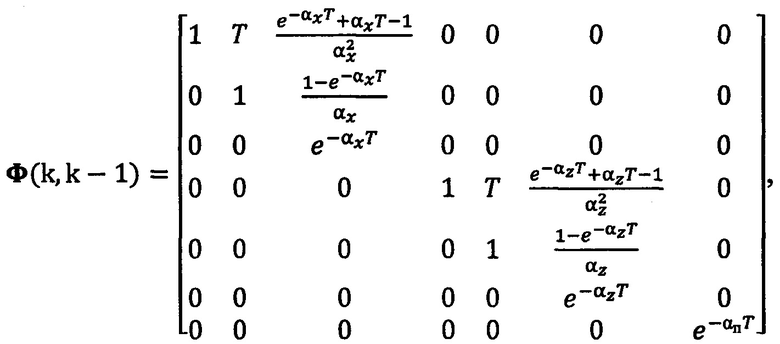
где αх и αz - коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ; Т - временной интервал между измерениями;
матрицу шумов наблюдения Dz(k) вычисляют по выражению
вектор экстраполированных наблюдений  вычисляют по выражению
вычисляют по выражению
где W - коэффициент, зависящий от длины волны принимаемых радиосигналов, определяемый в процессе калибровки ПРГС;
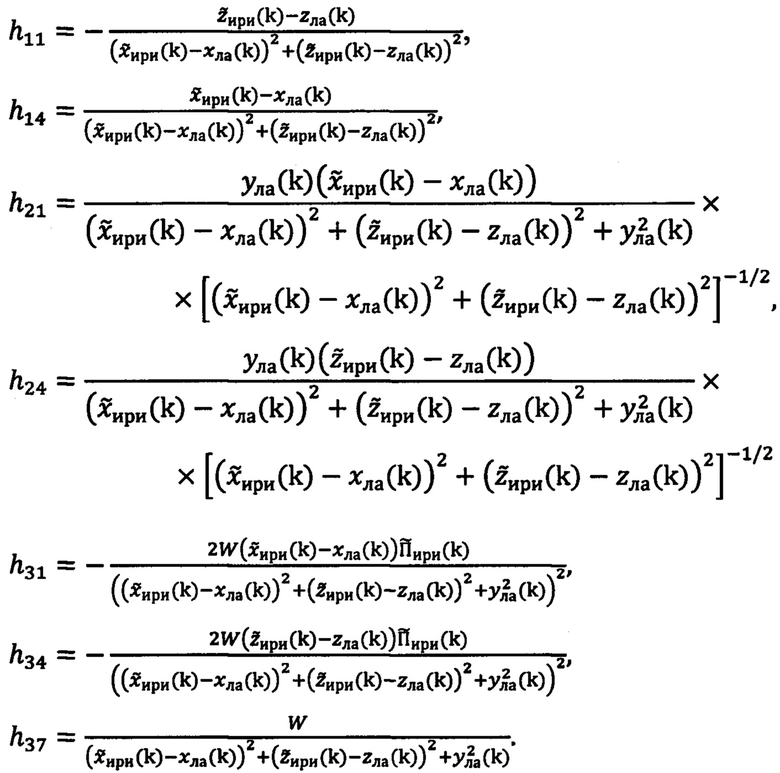
размер матрицы пересчета Н(k) увеличен и вычисляется по выражению
Сущность предлагаемого способа измерения местоположения излучающей цели в пассивной РЛС поясняется дальнейшим описанием и чертежами.
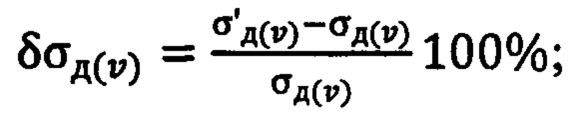
На фиг. 1 представлена геометрическая взаимосвязь параметров движения наблюдателя и цели.
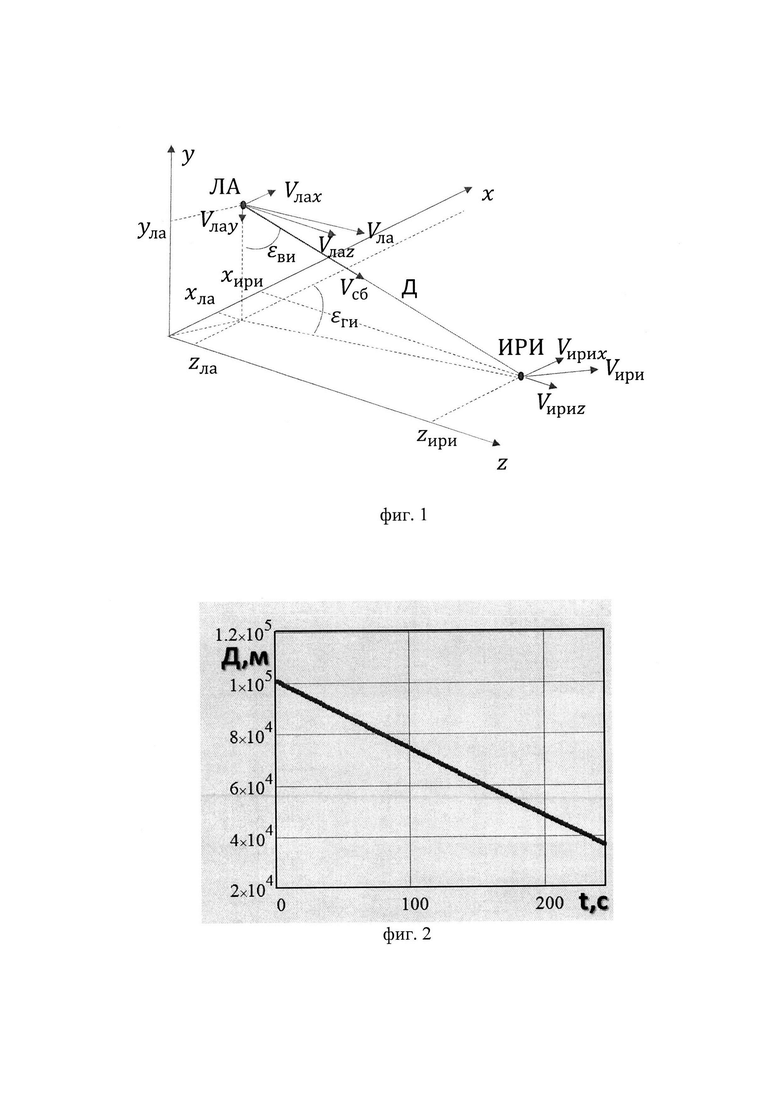
На фиг. 2 представлены результаты моделирования по оценке дальности сопровождаемого ИРИ по времени.
На фиг. 3 представлены результаты моделирования по оценке скорости сближения с сопровождаемым ИРИ по времени.
На фиг. 4 представлены результаты моделирования по оценке углов визирования сопровождаемой ИРИ по времени.
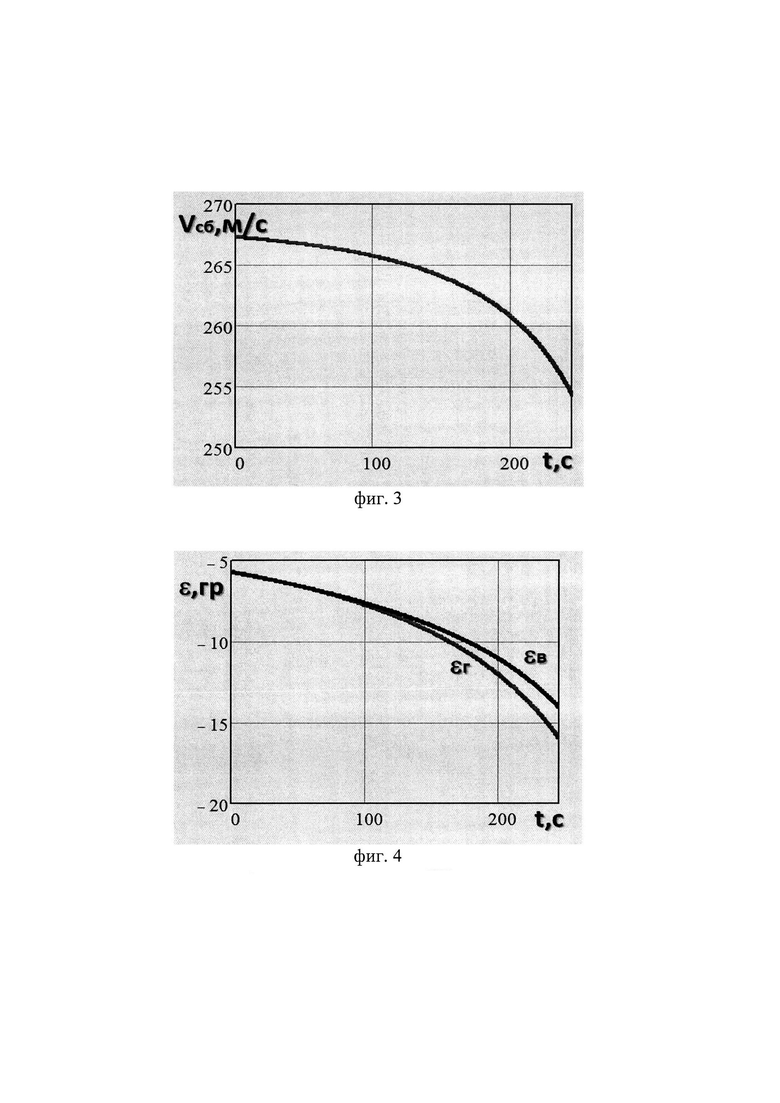
На фиг. 5 представлены результаты моделирования по оценке измерения энергетического параметра ИРИ по времени.
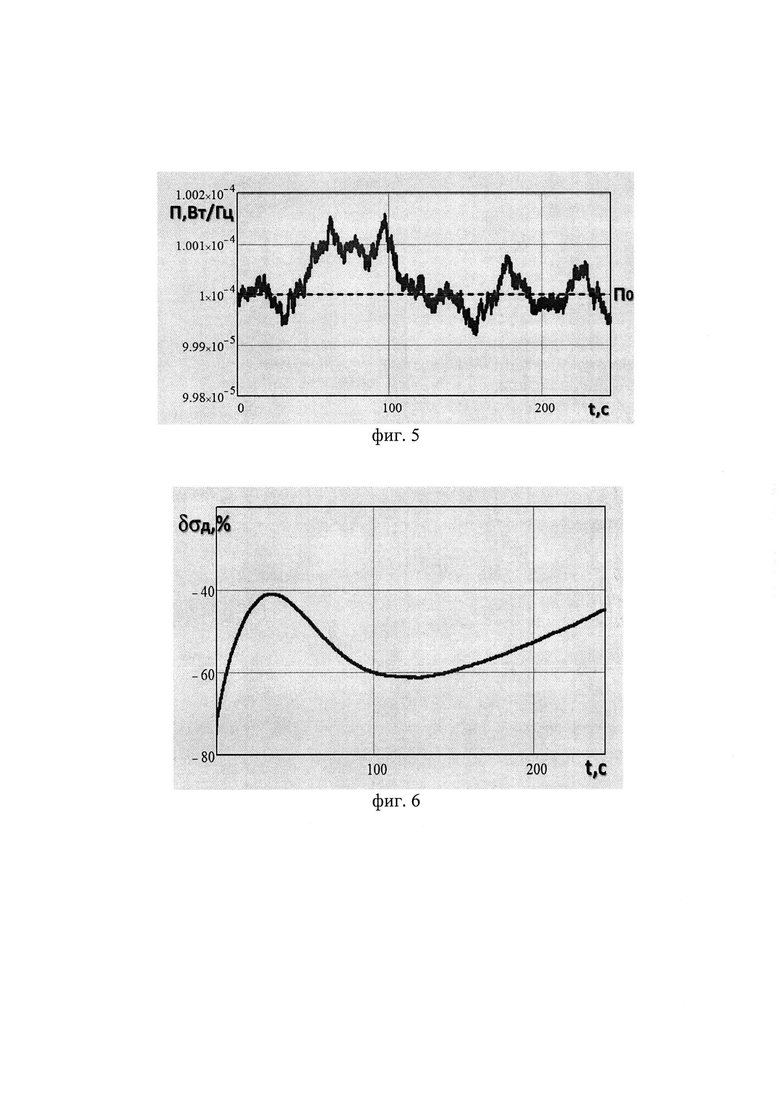
На фиг. 6 представлены результаты моделирования по оценке относительной погрешности измерения дальности ИРИ по времени.
На фиг. 7 представлены результаты моделирования по оценке относительной погрешности измерения скорости сближения с ИРИ по времени.
Предлагаемый способ реализуется следующим образом. На борту ЛА измеряют в НЗСК в tk моменты времени координаты ЛА хла(k), ула(k), zла(k), горизонтальные составляющие скорости ЛА Vла х(k), Vла у(k), Vла z(k), углы тангажа и рыскания ЛА ϑ(k), ψ(k). ПРЛС, размещенная на ЛА, принимает радиосигналы от ИРИ, по которым измеряет пеленги ИРИ в связанной с ЛА системе координат и мощность принимаемых сигналов ИРИ на выходе линейной части приемника Рпрм и(k). Преобразуют с учетом углов крена и тангажа ϑ(k), ψ(k) измеренные ПРЛС пеленги ИРИ в значения наблюдаемых углов визирования ИРИ εги(k) и εви(k) в горизонтальной и вертикальной плоскостях НЗСК, соответственно. Значения наблюдаемых углов визирования εги(k) и εви(k) и мощности принимаемых сигналов Рири(k) запоминают в виде координат вектора наблюдений Z(k)=[εги(k)εви(k)Pпри и(k)]T.
Назначают фильтруемые координаты вектора оценки состояния ИРИ  где
где  - горизонтальные координаты ИРИ в НЗСК,
- горизонтальные координаты ИРИ в НЗСК,  - горизонтальные координаты вектора скорости ИРИ в НЗСК,
- горизонтальные координаты вектора скорости ИРИ в НЗСК,  - горизонтальные координаты вектора ускорений ИРИ в НЗСК.
- горизонтальные координаты вектора ускорений ИРИ в НЗСК.
Назначают начальный вектор экстраполяции наблюдений равным вектору наблюдения Z(0), начальные значения корреляционной матрицы наблюдений Dz(0) определяют по априорно известным значениям дисперсий измерения углов визирования ИРИ и расчетной начальной дисперсии измерения мощности сигнала ИРИ на выходе приемника ПРЛС в соответствии с выражением
 - начальная оценка дисперсии шумов измерения мощности принятого сигнала ИРИ на выходе приемника ПРЛС Рпрм и(0);
- начальная оценка дисперсии шумов измерения мощности принятого сигнала ИРИ на выходе приемника ПРЛС Рпрм и(0);
С - константа, значение которой определяется в процессе калибровки ПРГС;
 - априорно известные дисперсии ошибок измерения углов визирования ИРИ.
- априорно известные дисперсии ошибок измерения углов визирования ИРИ.
Назначают начальные координаты вектора оценки состояния идентифицированного ИРИ  в соответствии с данными начальных координат ЛА и априорными данными скорости, ускорения и энергетического параметра ИРИ:
в соответствии с данными начальных координат ЛА и априорными данными скорости, ускорения и энергетического параметра ИРИ:
Верхний индекс «min» и «max» в обозначениях скорости Vири, ускорения аири и энергетического параметра Пири ИРИ указывает на минимальное и максимальное значение соответствующего параметра по априорным данным идентифицированного носителя ИРИ.
Определяют начальное значение корреляционной матрицы ошибок оценки параметров состояния ИРИ R(0) по формулам
 - максимальное и минимальное значения априорной скорости ИРИ;
- максимальное и минимальное значения априорной скорости ИРИ;
 - максимальное и минимальное значения априорного ускорения ИРИ;
- максимальное и минимальное значения априорного ускорения ИРИ;
 - максимальное и минимальное значения априорного значения энергетического параметра ИРИ;
- максимальное и минимальное значения априорного значения энергетического параметра ИРИ;
Рассчитывают априорную корреляционную матрицу шумов модели состояния ИРИ Dx
где  - дисперсия изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ;
- дисперсия изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ;
 - априорные данные о дисперсии шумов ускорений ИРИ по соответствующим осям НЗСК;
- априорные данные о дисперсии шумов ускорений ИРИ по соответствующим осям НЗСК;
αх и αz - коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ;
αп - величина, обратная интервалу корреляции процесса изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ;
Вычисляют текущие оценки вектора оценок состояния ИРИ  по алгоритму квазилинейной косвенной фильтрации в последовательности:
по алгоритму квазилинейной косвенной фильтрации в последовательности:
Вычисляют экстраполированные на следующий tk момент времени оценки параметров вектора состояния ИРИ  по формуле
по формуле
где Ф (k,k-1) - фундаментальная матрица, связывающая оценку вектора оценок состояния ИРИ в tk-1 момент времени с экстраполированным его значением в следующий момент времени tk=tk-1+Т;
Т - временной интервал между измерениями;
А - вектор-константа, учитывающий флуктуации энергетического параметра относительно среднего значения;
 - среднее значение энергетического параметра; Вычисляют дисперсии и корреляционные моменты ошибок вектора экстраполяции оценок состояния ИРИ по формуле
- среднее значение энергетического параметра; Вычисляют дисперсии и корреляционные моменты ошибок вектора экстраполяции оценок состояния ИРИ по формуле

где  - корреляционная матрица ошибок вектора экстраполяции оценок состояния ИРИ;
- корреляционная матрица ошибок вектора экстраполяции оценок состояния ИРИ;
R(k-1) - корреляционная матрица ошибок предшествующего вектора оценок состояния ИРИ.
Вычисляют вектор экстраполированных наблюдений  по координатам ЛА и координатам вектора экстраполированных оценок состояния ИРИ
по координатам ЛА и координатам вектора экстраполированных оценок состояния ИРИ  по формуле
по формуле
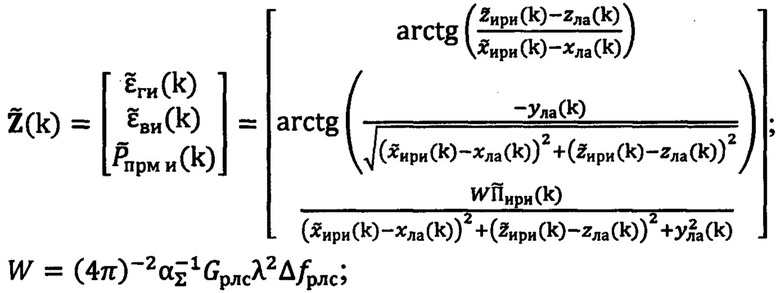
где Gрлс - коэффициент усиления антенны ПРЛС;
λ - длина волны радиосигналов ИРИ;
αΣ - суммарный коэффициент потерь сигнала ИРИ по радиолинии ИРИ - ПРЛС;
Δƒрлс - ширина полосы пропускания приемника ПРЛС.
Вычисляют корреляционную матрицу дисперсий вектора наблюдения Dz(k) по дисперсии шумов измерения мощности сигнала на выходе приемника ПРЛС  и априорно известным дисперсиям измерения углов визирования ИРИ
и априорно известным дисперсиям измерения углов визирования ИРИ  по формуле
по формуле
где С - константа, значение которой определяется в процессе калибровки ПРГС.
Вычисляют матрицу пересчета изменений вектора экстраполированной оценки состояния ИРИ в изменения вектора экстраполированных наблюдений Н(k) по формулам

Вычисляют текущий вектор оценки состояния ИРИ  по формуле
по формуле

где K(k) - матрица коэффициентов усиления невязок.
Вычисляют корреляционную матрицу ошибок вектора оценки состояния ИРИ по формуле:

По координатам  вектора оценки состояния ИРИ
вектора оценки состояния ИРИ  измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Vлау(k), Vлaz(k) вычисляют наклонную дальность до ИРИ
измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Vлау(k), Vлaz(k) вычисляют наклонную дальность до ИРИ  и скорость сближения с ним
и скорость сближения с ним  по формулам:
по формулам:
Для определения эффективности предлагаемого способа было проведено математическое моделирование процесса наблюдения бортовой ПРЛС наземного (надводного) движущегося ИРИ. При этом рассматривалась типовая траектория перемещения ЛА относительно источника радиоизлучений, описываемая временными зависимостями наклонной дальности до ИРИ, скорости сближения с ним и углов визирования представлены на фиг. 2, 3 и 4 соответственно. Закон изменения энергетического параметра ИРИ во времени представлен на фиг. 5. Темп обновления измерительной информации в ПРЛС принимался равным 100 мс, среднеквадратичная ошибка (СКО) измерения углов пеленгов - 1 градус, а СКО измерений мощности принимаемых сигналов - 5% от номинального значения. Коэффициент пропорциональности W принимался равным 1,82⋅105(м2⋅Гц). В процессе моделирования дальность до ИРИ изменялась от 100 до 35 км, скорость сближения с ИРИ - от 268 до 255 м/с, а угловая скорость вращения линии визирования от 2 до 8 угловых минут в секунду.
В качестве показателей эффективности рассматривались относительные изменения среднеквадратичных ошибок определения дальности до ИРИ, и скорости сближения с ним, вычисляемые по формуле
где σ'д, σ'ν, σд, σν - среднеквадратические ошибки определения дальности до ИРИ и скорости сближения с ним при использовании заявляемого способа и способа-прототипа.
Результаты моделирования в виде временных зависимостей показателей эффективности представлены на фигурах 6 и 7. Их анализ показывает, что при использовании предлагаемого способа точность определения дальности до ИРИ и скорости сближения с ним повышается. Так в рассмотренных условиях прирост в точности определения дальности может превышать 60%, а в точности определения скорости сближения с ИРИ - 40%. Сравнительный анализ точности определения дальности до ИРИ и скорости сближения с ним при использовании предлагаемого способа и способа, описанного в [1], указывают на преимущество в точности заявляемого способа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ определения координат и параметров движения источников радиоизлучений с помощью однопозиционной пассивной радиолокационной станции, основанный на нелинейной дискретной фильтрации угловых координат ИРИ, в котором дополнительно учитываются измерения мощности принимаемых радиосигналов.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что дополнительный учет в алгоритме нелинейной дискретной фильтрации измерение мощности принимаемых сигналов существенно повышает точность определения координат и параметров движения ИРИ.
Предлагаемое техническое решение применимо, так как для его реализации могут быть использованы существующие бортовые радиолокационные станции, функционирующие в пассивном режиме, либо бортовые станции непосредственной радиотехнической разведки.
Литература
1. Патент России № 2232402 «Способ определения дальности до источников радиоизлучений и скорости сближения с ними в однопозиционных радиолокационных системах».
2. Белов С.Г., Коданев В.Л. Оптимальная фильтрация текущих координат подвижных радиоэлектронных средств. Цифровая обработка сигналов: Научно-методические материалы / Под ред. Е.Ф. Толстова. М.: ВВИА им. проф. Н.Е. Жуковского, 1995.
3. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. Ч. 1. М: Издание ВВИА им. проф. Н.Е. Жуковского, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ПИЛОТИРУЕМОЙ ВОЗДУШНОЙ ЦЕЛИ | 2009 |
|
RU2408031C2 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
Изобретение относится к радиолокации и может быть использовано в системах измерения параметров движения наземных (надводных) источников радиоизлучений (ИРИ) с помощью пассивной однопозиционной радиолокационной станции (ПРЛС). Техническим результатом изобретения является повышение точности ПРЛС в определении дальности и скорости сближения с наземным или надводным мобильным ИРИ на дистанциях, соизмеримых с дальностью его обнаружения, когда угловая скорость линии визирования мала. Технический результат достигается квазилинейной косвенной фильтрацией вектора состояния цели, включением в вектор наблюдаемых параметров ИРИ, кроме углов визирования цели, мощности сигнала ИРИ на выходе линейной части приемника ПРЛС, в число фильтруемых параметров вектора состояния ИРИ кроме координат, скорости и ускорения ИРИ добавляется энергетический параметр ИРИ. 7 ил.
Способ определения координат и параметров движения источников радиоизлучений (ИРИ) с помощью однопозиционной пассивной радиолокационной станции (ПРЛС) на борту летательного аппарата (ЛА) включает измерение в нормальной земной системе координат (НЗСК) в tk моменты времени координат ЛА хла(k), ула(k), zла(k), горизонтальных составляющих скорости ЛА Vлa x(k), Vла у(k), Vлa z(k), углов тангажа и рыскания ЛА ϑ(k), ψ(k); прием ПРЛС радиосигналов от ИРИ, по которым измеряют пеленги ИРИ в связанной с ЛА системе координат; расчет значений наблюдаемых углов визирования ИРИ εги(k) и εви(k) в горизонтальной и вертикальной плоскостях НЗСК с учетом углов крена и тангажа ϑ(k), ψ(k) соответственно; запоминание наблюдаемых углов визирования в виде координат вектора наблюдений Z(k)=[εги(k)εви(k)]T, назначение фильтруемых координат вектора оценки состояния ИРИ  где
где  и
и  - горизонтальные координаты ИРИ в НЗСК,
- горизонтальные координаты ИРИ в НЗСК,  - горизонтальные координаты вектора скорости ИРИ в НЗСК,
- горизонтальные координаты вектора скорости ИРИ в НЗСК,  - горизонтальные координаты вектора ускорений ИРИ в НЗСК; расчет начальных координат вектора оценки состояния ИРИ
- горизонтальные координаты вектора ускорений ИРИ в НЗСК; расчет начальных координат вектора оценки состояния ИРИ  по начально измеренным координатам ЛА, углам визирования ИРИ и априорным данным о скорости и ускорении идентифицированного ИРИ; назначение начального вектора экстраполяции наблюдений
по начально измеренным координатам ЛА, углам визирования ИРИ и априорным данным о скорости и ускорении идентифицированного ИРИ; назначение начального вектора экстраполяции наблюдений  равным начальному вектору наблюдений Z(0); расчет корреляционной матрицы вектора оценки состояния ИРИ R(0) по априорно известным дисперсиям измерения углов визирования ИРИ, начальным координатам ЛА, начально измеренным углам визирования ИРИ, априорным данным о диапазоне скоростей и ускорений идентифицированного ИРИ; назначение матрицы шумов наблюдения Dz по априорно известным дисперсиям измерения углов визирования ИРИ, расчет корреляционной матрицы шумов вектора оценки состояния ИРИ Dx по априорным данным о дисперсиях оценок координат и коэффициентам маневренности ИРИ; расчет текущих оценок вектора экстраполяции оценки состояния ИРИ
равным начальному вектору наблюдений Z(0); расчет корреляционной матрицы вектора оценки состояния ИРИ R(0) по априорно известным дисперсиям измерения углов визирования ИРИ, начальным координатам ЛА, начально измеренным углам визирования ИРИ, априорным данным о диапазоне скоростей и ускорений идентифицированного ИРИ; назначение матрицы шумов наблюдения Dz по априорно известным дисперсиям измерения углов визирования ИРИ, расчет корреляционной матрицы шумов вектора оценки состояния ИРИ Dx по априорным данным о дисперсиях оценок координат и коэффициентам маневренности ИРИ; расчет текущих оценок вектора экстраполяции оценки состояния ИРИ  по алгоритму квазилинейной косвенной фильтрации в последовательности: расчет вектора экстраполированных оценок состояния ИРИ
по алгоритму квазилинейной косвенной фильтрации в последовательности: расчет вектора экстраполированных оценок состояния ИРИ  в следующий tk момент времени по результатам оценки предшествующего вектора оценки состояния ИРИ
в следующий tk момент времени по результатам оценки предшествующего вектора оценки состояния ИРИ  по формуле
по формуле

где Ф(k,k-1) - фундаментальная матрица, связывающая вектор оценки состояния ИРИ в tk-1 момент времени с вектором экстраполяции его значения в следующий момент времени tK=tk-1+T; расчет корреляционной матрицы ошибок экстраполированных оценок состояния ИРИ  по предшествующему значению корреляционной матрицы вектора оценки состояния ИРИ R(k-1) и корреляционной матрице шумов вектора оценки состояния ИРИ Dx по формуле
по предшествующему значению корреляционной матрицы вектора оценки состояния ИРИ R(k-1) и корреляционной матрице шумов вектора оценки состояния ИРИ Dx по формуле

расчет текущего вектора оценки состояния ИРИ  как сумму вектора экстраполированных оценок состояния ИРИ
как сумму вектора экстраполированных оценок состояния ИРИ  с произведением матрицы коэффициентов усиления невязок K(k) на невязку измеренного вектора наблюдения Z(k) с вектором экстраполированных наблюдений
с произведением матрицы коэффициентов усиления невязок K(k) на невязку измеренного вектора наблюдения Z(k) с вектором экстраполированных наблюдений  по формулам
по формулам
где Н(k) - матрица пересчета изменений вектора экстраполированной оценки состояния ИРИ в изменения вектора экстраполированных наблюдений; Dz - корреляционная матрица дисперсий вектора наблюдения; расчет корреляционной матрицы ошибок вектора оценок состояния ИРИ по формуле  расчет наклонной дальности ИРИ
расчет наклонной дальности ИРИ  и скорости сближения с ним
и скорости сближения с ним  по координатам вектора оценки состояния ИРИ
по координатам вектора оценки состояния ИРИ  измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Vлay(k), Vлaz(k) по формулам
измеренным значениям координат ЛА хла(k), ула(k), zла(k) и проекций его скорости Vлах(k), Vлay(k), Vлaz(k) по формулам
отличается тем, что при каждом наблюдении ИРИ дополнительно измеряют мощность Рпрм и(k) радиосигналов ИРИ на выходе линейной части приемника ПРЛС, включают ее значение в вектор наблюдения Z(k)=[εги(k)εги(k)Рпрм и(k)]Т; включают экстраполированное значение мощности радиосигнала на выходе линейной части приемника ПРЛС  в вектор экстраполированного наблюдения
в вектор экстраполированного наблюдения  включают в вектор экстраполированных оценок состояния ИРИ
включают в вектор экстраполированных оценок состояния ИРИ  экстраполированное значение энергетического параметра
экстраполированное значение энергетического параметра  включают в вектор оценки параметров состояния ИРИ
включают в вектор оценки параметров состояния ИРИ  оценку энергетического параметра
оценку энергетического параметра  под энергетическим параметром Пири понимается произведение
под энергетическим параметром Пири понимается произведение  где Рири - мощность сигнала, излучаемого ИРИ, Gири - коэффициент усиления антенны ИРИ в направлении на ПРЛС, Δƒири - ширина спектра сигнала ИРИ; новые записи координат векторов экстраполированной оценки состояния ИРИ
где Рири - мощность сигнала, излучаемого ИРИ, Gири - коэффициент усиления антенны ИРИ в направлении на ПРЛС, Δƒири - ширина спектра сигнала ИРИ; новые записи координат векторов экстраполированной оценки состояния ИРИ  и оценки вектора состояния ИРИ
и оценки вектора состояния ИРИ  имеют вид
имеют вид  и
и 
 определяют координаты начального значения вектора оценки состояния идентифицированного ИРИ
определяют координаты начального значения вектора оценки состояния идентифицированного ИРИ  в соответствии с начальными координатами ЛА, начальными углами визирования ИРИ, априорными данными скорости, ускорения и энергетического параметра ИРИ по формулам
в соответствии с начальными координатами ЛА, начальными углами визирования ИРИ, априорными данными скорости, ускорения и энергетического параметра ИРИ по формулам
где верхний индекс «min» и «max» в обозначениях скорости Vири, ускорения aири и энергетического параметра Пири ИРИ указывает на минимальное и максимальное значение соответствующего параметра по априорным данным идентифицированного ИРИ и его носителя; начальное значение вектора экстраполяции наблюдения  устанавливают равным наблюдаемому вектору:
устанавливают равным наблюдаемому вектору:  значение априорной матрицы шумов наблюдения Dz заменяют на обновляемую при каждом измерении матрицу Dz(k), начальное значение которой вычисляют по формуле
значение априорной матрицы шумов наблюдения Dz заменяют на обновляемую при каждом измерении матрицу Dz(k), начальное значение которой вычисляют по формуле

где  - начальное значение дисперсии шумов измерения мощности сигнала ИРИ на выходе приемника ПРЛС, С - константа, значение которой определяется в процессе калибровки ПРЛС,
- начальное значение дисперсии шумов измерения мощности сигнала ИРИ на выходе приемника ПРЛС, С - константа, значение которой определяется в процессе калибровки ПРЛС,  - априорно известные дисперсии измерения углов визирования ИРИ; размер корреляционной матрицы шумов вектора оценки состояния Dx увеличен, на основании априорных данных о ИРИ, ее начальное значение рассчитывают по формуле
- априорно известные дисперсии измерения углов визирования ИРИ; размер корреляционной матрицы шумов вектора оценки состояния Dx увеличен, на основании априорных данных о ИРИ, ее начальное значение рассчитывают по формуле
где  - дисперсия изменения энергетического параметра, задается исходя из априорных сведений о типе ИРИ,
- дисперсия изменения энергетического параметра, задается исходя из априорных сведений о типе ИРИ,  - дисперсии шумов ускорений ИРИ по соответствующим осям НЗСК,
- дисперсии шумов ускорений ИРИ по соответствующим осям НЗСК,  - коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ, αп - величина, обратная интервалу корреляции процесса изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ; размер корреляционной матрицы ошибок вектора оценки состояния ИРИ R(k) увеличен и ее начальное значение R(0) определяется по формуле
- коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ, αп - величина, обратная интервалу корреляции процесса изменения энергетического параметра, задаваемая исходя из априорных сведений о типе ИРИ; размер корреляционной матрицы ошибок вектора оценки состояния ИРИ R(k) увеличен и ее начальное значение R(0) определяется по формуле

 - максимальное и минимальное значения априорной скорости ИРИ;
- максимальное и минимальное значения априорной скорости ИРИ;
 - максимальное и минимальное значения априорного ускорения ИРИ;
- максимальное и минимальное значения априорного ускорения ИРИ;
 - максимальное и минимальное значения априорного значения энергетического параметра ИРИ;
- максимальное и минимальное значения априорного значения энергетического параметра ИРИ;
вектор экстраполированной оценки состояния ИРИ  рассчитывается как сумма двух векторов, первый равен произведению фундаментальной матрицы Ф(k-1,k) на вектор оценки предшествующего состояния ИРИ
рассчитывается как сумма двух векторов, первый равен произведению фундаментальной матрицы Ф(k-1,k) на вектор оценки предшествующего состояния ИРИ  второй вектор А - константа, отражающая флуктуацию энергетического параметра около среднего значения, формула оценки
второй вектор А - константа, отражающая флуктуацию энергетического параметра около среднего значения, формула оценки  имеет вид
имеет вид
где  - среднее значение энергетического параметра; размер фундаментальной матрицы Ф(k,k-1), матрицы коэффициентов усиления невязок K(к) и корреляционной матрицы ошибок вектора экстраполяции оценки состояния ИРИ
- среднее значение энергетического параметра; размер фундаментальной матрицы Ф(k,k-1), матрицы коэффициентов усиления невязок K(к) и корреляционной матрицы ошибок вектора экстраполяции оценки состояния ИРИ  увеличен, при этом значение фундаментальной матрицы Ф(k,k-1) вычисляется по выражению
увеличен, при этом значение фундаментальной матрицы Ф(k,k-1) вычисляется по выражению
где αх и αz - коэффициенты маневренности, задаваемые исходя из априорных сведений о типе ИРИ; Т - временной интервал между измерениями; матрицу шумов наблюдения Dz(k) вычисляют по выражению

вектор экстраполированных наблюдений  вычисляют по выражению
вычисляют по выражению

где 







| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И СКОРОСТИ СБЛИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НИМ | 2003 |
|
RU2251709C1 |
| Однопозиционный мультипликативный разностно-относительный способ определения координат местоположения источников радиоизлучения | 2016 |
|
RU2668566C2 |
| US 5262789 A, 16.11.1993 | |||
| US 6822583 B2, 23.11.2004 | |||
| WO 2007047119 A2, 26.04.2007 | |||
| US 6577272 B1, 10.06.2003. | |||

