Предлагаемое изобретение относится к области создания высокоточных средств контрольно-измерительной аппаратуры и органов управления и может быть использовано для ориентации и стабилизации положения в пространстве материальных объектов, служащих базой для выполнения действий по слежению, измерению, управлению, выполнению операций, требующих высокой степени защиты от стороннего воздействия.
Известно техническое решение по а.с. СССР №529317, М. кл. F 16 F 15/10 "Способ гашения крутильных колебаний вала и устройство для его осуществления" - прототип предлагаемого изобретения, - обеспечивающее расширение возможностей динамического гашения крутильных колебаний тела вращения в широком диапазоне изменения угловых ускорений и нагрузок путем соединения с телом вращения диска, являющегося платформой для вращающихся вместе с диском грузов, которые взаимодействуют с упругим элементом, выполняющим роль управляющей связи положения грузов.
Однако уже само назначение известного технического решения сужает область его применения рамками угловых частот и перемещений материальных объектов при жесткой фиксации их осей вращения в пространстве.
Предлагаемые способ и устройство для его осуществления решают задачи:
- формирования или фильтрования и гашения частот и амплитуд линейных колебаний материального объекта, сообщаемых ему сторонними возмущающими факторами, действующими на него непосредственно или через посредство упругого элемента;
- ориентации и стабилизации положений материального объекта в пространстве, требуемых условиями выполнения им заданных функций.
Решение этих задач обеспечивается тем, что для материального объекта, подверженного действию внешних возмущающих факторов движения, роль средств, обеспечивающих формирование или фильтрование и гашение частот и амплитуд его линейных колебаний, выполняют грузы, подчиненные управляющим связям их положения. Вращательное движение грузов обуславливает появление импульса, управляющего характеристиками линейных колебаний материального объекта; плоскость действия этого импульса перпендикулярна плоскости вращения грузов. Задание угловых скоростей и ускорений вращения грузов осуществляется дополнительной управляющей связью, причем функции управляющих связей распределены между ними таким образом, что одна из них управляет демпфированием возмущающих факторов, имеющих частотную характеристику изменения, а другая - величиной статической деформации линейной упругой связи.
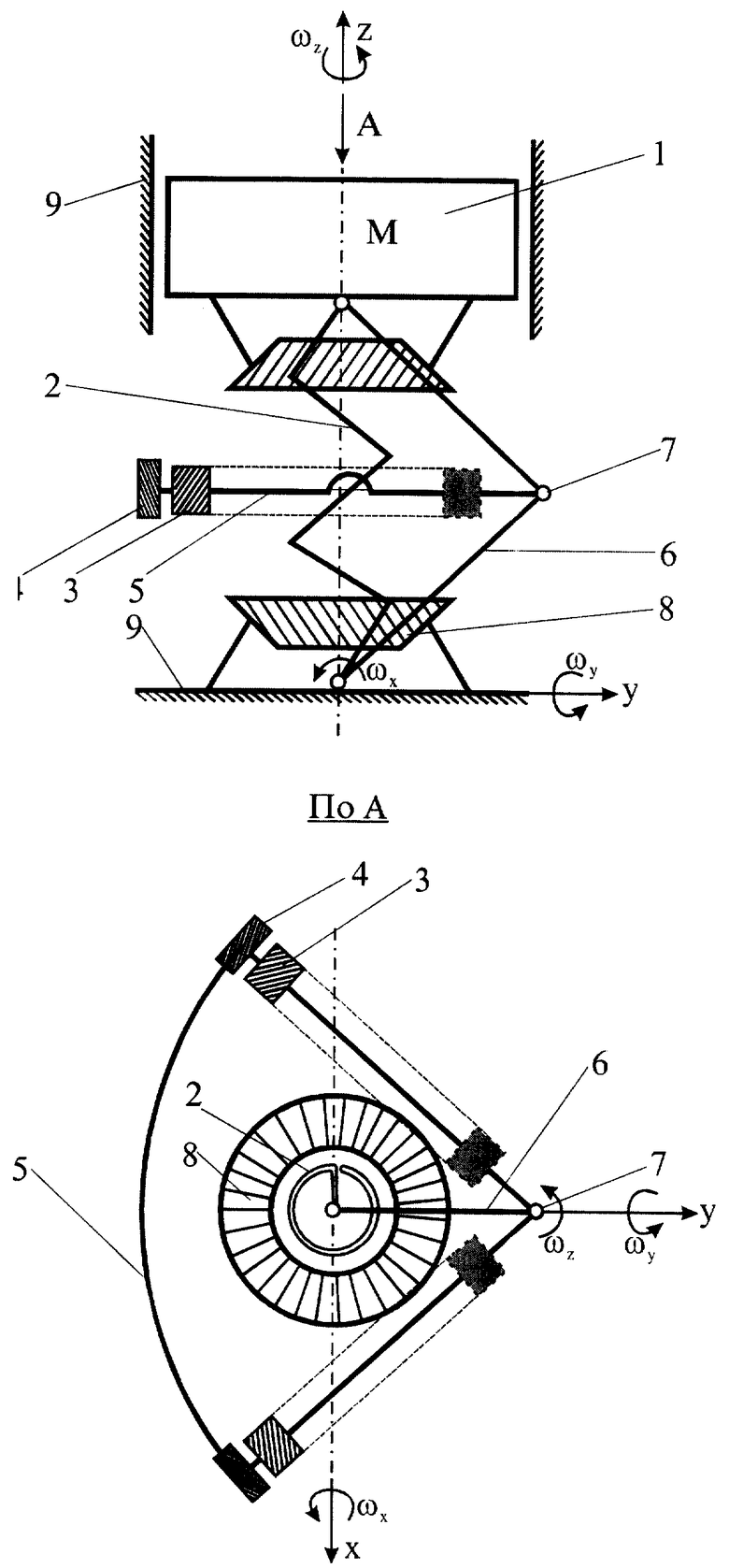
Устройство для осуществления этого способа схематически представлено на чертеже, где 1 - материальный объект; 2 - линейная упругая связь; 3 - груз; 4 - управляющая связь положений груза; 5 - вращающаяся платформа; 6 - жесткая линейная связь; 7 - шарнирные соединения; 8 - дополнительная управляющая связь; 9 - опора (стойка).
Основная механическая цепь - объект управления - содержит элементы 1, 2, 9 по чертежу. Управляющая механическая цепь преобразования движения содержит элементы 3, 4, 5, 6, 7 по чертежу. Параллельное соединение механических цепей осуществляется с помощью шарниров 7.
Опора соединена с материальным объектом посредством линейной упругой связи 2, например пружины. Грузы 3 расположены на вращающейся платформе 5 и снабжены управляющей связью 4 их положения. Жеские линейные связи 6 соединяют вращающуюся платформу 5 с концами линейной упругой связи 2. Шарнирное соединение линейной упругой связи 2, жестких линейных связей 6 и вращающейся платформы 5 выполнено с возможностью обеспечения постоянного совпадения оси вращения платформы 5 перпендикулярно ее рабочей поверхности с осью линейной упругой связи 2, способной занять любое положение в пространстве. Жеские линейные связи 6 снабжены дополнительной управляющей связью 8, размещенной на опоре 9 и или на материальном объекте 1 с возможностью обеспечения управления вращением платформы 5.
Перемещение грузов 3 вдоль вращающейся платформы 5 под действием управляющей связи 4 и вращение этих грузов вместе с платформой 5 под действием дополнительной управляющей связи 8 передаются в форме управляющего импульса через посредство жестких линейных связей 6 и шарниров 7 на элементы основной цепи, чем обеспечивается управление характеристиками линейных колебаний материального объекта 1.
Для эффективного фильтрования воздействий возмущающих факторов управляющая цепь может содержать несколько грузов 3 на поверхности вращающейся платформы 5, каждый из этих грузов может быть снабжен собственной управляющей связью положения 4.
Жесткие линейные связи снабжены управляющей связью.
Дополнительная управляющая связь 8 вращения платформы 5, кроме того, что ею обеспечивается вращение платформы 5 относительно оси, совпадающей в любой момент времени с осью упругой связи 2 (дуговая стрелка ωz на чертеже), может быть снабжена дополнительно двумя степенями свободы (дуговые стрелки ωх и ωy на чертеже), чем обеспечивается возможность изменения положения оси материального объекта 1 вместе с осью упругой связи 2 относительно опоры (стойки) 9.
Технический результат реализации предлагаемого изобретения заключается в обеспечении возможности:
- самоориентации и стабилизации положения материального объекта в пространстве при действии внешних возмущающих факторов;
- самоподстройки и программного формирования потребных частот и амплитуд линейных колебаний материального объекта путем фильтрации всего спектра внешних возмущающих факторов или задания нужных параметров движения управляющими связями.
Таким образом, предложенный способ и устройство для его осуществления дают возможность создания разнообразных средств, в том числе и для космической отрасли, для выполнения с высокой степенью точности действий по слежению, измерению, управлению, выполнению операций, требующих защиты от стороннего воздействия.
Изобретение относится к машиностроению и может быть использовано для ориентации и стабилизации положения в пространстве материальных объектов. Сущность способа заключается в том, что материальный объект взаимодействует с опорой посредством линейной упругой связи, например пружины, с образованием основной механической цепи - объекта управления. Роль гасителей колебаний выполняют грузы, являющиеся элементами управляющей механической цепи преобразования движения, снабженные управляющей связью их положения при вращении в широком диапазоне изменения угловых скоростей и ускорений. Плоскость действия импульса, формирующего или фильтрующего и гасящего частоты и амплитуды линейных колебаний материального объекта, перпендикулярна плоскости вращения грузов, а значения их угловых скоростей и ускорений задаются дополнительной управляющей связью. При этом функции управляющих связей распределены между ними таким образом, что одна из них управляет демпфированием возмущающих факторов, имеющих частотную характеристику изменения, а другая - величиной статической деформации линейной упругой связи. Техническим результатом является формирование или фильтрование и гашение частот и амплитуд линейных колебаний материального объекта, сообщаемых ему сторонними возмущающими факторами, а также ориентация и стабилизация положений материального объекта в пространстве. 2 с. и 1 з.п. ф-лы, 1 ил.
| Способ гашения крутильных колебаний вала и устройство для его осуществления | 1975 |
|
SU529317A1 |
| ПРИВОД МАШИНЫ | 1996 |
|
RU2115845C1 |
| US 4044627 A, 30.08.1977. | |||

