Изобретение относится к промысловой геофизике и может быть использовано для определения наклона скважины положения отклонителя бурового инструмента и азимута.
Известен способ определения зенитных и визирных углов, реализованный в устройстве (а.с. СССР 1328497 кл. Е 21 В 47/02 опубл. 1987), включающий установку в корпусе преобразователя трех ортогональных маятников с датчиками угловых перемещений, измерение с них сигналов, селективный выбор сигналов и определение зенитных и визирных углов по измеренным сигналам в дискретизованных диапазонах.
Недостаток этого способа заключается в низкой точности, поскольку при обработке результатов измерения не учитывают угловые параметры отклонений маятников от осей ортонормированного базиса (прямоугольной системы координат), связанного с корпусом преобразователя.
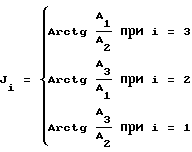
Наиболее близким техническим решением к заявленному является способ определения зенитных и визирных углов, основанный на измерении сигналов с 3-ортогональных датчиков угловых перемещений, установленных на маятниках, причем ось вращения третьего маятника ориентирована по продольной оси корпуса, априорно измеряют параметры τ и ρ - углы неортогональной установки первого маятника по отношению к базису корпуса соответственно в плоскостях OXY и OXZ, параметр γ - угол неортогональной установки второго маятника по отношению к базису корпуса в плоскости OYZ, параметры ε и λ - углы неортогональной установки третьего маятника по отношению к базису корпуса соответственно в плоскостях OXZ и OYZ, занимаемые Q и визирные Ψ углы в дискретизованных диапазонах определяют по измеренным сигналам с датчиков угловых перемещений βi (i=l,2,3) и параметрами σ, ρ, γ, ε, и λ следующим образом.
Для небольших углов наклона (θ≤45o)
Для больших углов наклона (θ>45o)
Недостатком этого способа является также невысокая точность, поскольку не раскрыт аппарат определения углов неортогональной установки маятников по отношению к базису корпуса в соответствующих плоскостях.
Целью заявленного способа является повышение точности определения углов направления скважины путем коррекции первичных сигналов с измерителей напряженности поля.
Поставленная цель достигается тем, что в способе определения углов направления скважины, включающем установку в корпус прибора трех взаимно ортогональных измерителей напряженности поля, причем ось чувствительности одного из них ориентирована по продольной оси прибора, замер первичных сигналов измерителей напряженности поля, по которым вычисляют углы направления скважины, поочередное вращение корпуса прибора относительно одной из трех взаимно ортогональных осей, каждая из которых должна совпадать с осью чувствительности измерителя напряженности поля и направлена ортогонально направлению напряженности поля, определяют максимальные и минимальные значения сигналов с поочередно вращающихся измерителей напряженности поля и углы поворота вокруг оси вращения, соответствующие этим значениям, по этим величинам определяют погрешность измерения, обусловленную неортогональностью измерителей напряженности поля, и корректируют их первичные сигналы
где Aiскор - скорректированная величина первичного сигнала измерителя напряженности поля,
Аiнескор - нескорректированная величина первичного сигнала измерителя напряженности поля,
Aimax - максимальная величина сигнала измерителя напряженности поля при вращении вокруг своей оси,
Aimin минимальная величина сигнала измерителя напряженности поля при вращении вокруг своей оси,
ϕi - угол поворота вокруг оси вращения,
ϕi0 - угол поворота вокруг оси вращения, соответствующий величине сигнала измерителя напряженности поля Ai max.
Пример выполнения способа.
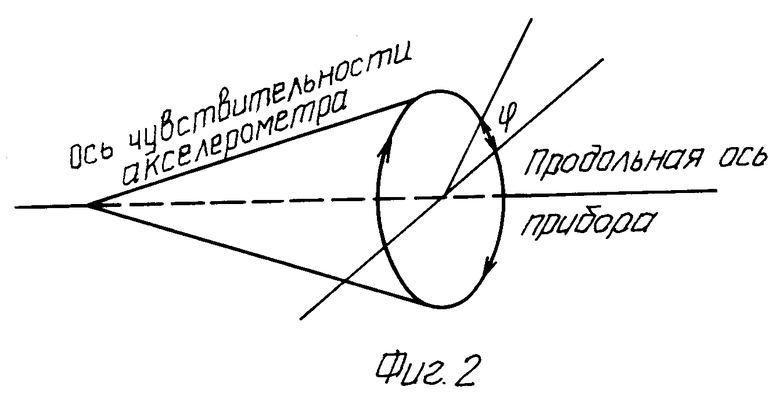
На фиг. 1 показана структурная схема устройства реализации заявленного способа, на фиг.2 - направление перемещения оси чувствительности измерителя напряженности поля.
Устройство реализации способа содержит три датчика 1, 2 и 3, например акселерометра, установленные в корпусе 4 прибора, оси чувствительности которых расположены взаимно ортогонально, причем одна из них (датчика 3) ориентирована по продольной оси корпуса 4 прибора. Датчики 1, 2 и 3 подключены через последовательно соединенные коммутатор 5 и аналого-цифровой преобразователь 6 с вычислительным блоком 7.
Устройство работает следующим образом.
Первичные сигналы A1, А2 и А3 поступают на коммутатор 5, который подключает их поочередно ко входу АЦП 6. С выхода АЦП 6, в цифровом виде сигналы поступают в вычислительный блок 7, где по заложенным в него алгоритмам производится коррекция сигналов, вычисление углов направления скважины и траектории ствола скважины. Сигналы, потребные для коррекции каждого датчика, определяются поочередно для каждого датчика следующим образом: для датчика 3 устанавливается корпус 4 прибора горизонтально и производится вращение корпуса 4 вокруг продольной оси прибора. Направление поля (в данном случае гравитационного) будет ортогонально оси вращения. Если ось чувствительности акселерометра 3 совпадает с продольной осью корпуса 4 прибора, то его показания должны быть равны 0, т.е. А3=0 и при вращении корпуса 4 прибора вокруг этой оси показания А3 не должны изменяться. В действительности ось чувствительности акселерометра из-за неизбежных погрешностей не совпадает с продольной осью корпуса 4 прибора, поэтому, вращая корпус 4 прибор вокруг продольной оси, ось чувствительности акселерометра будет перемещаться по образующей конуса (см. фиг.2), высота которого совпадает с осью вращения и с продольной осью корпуса 4 прибора. Показания акселерометра 3 при этом будут изменяться от значения А3 мах до значения А3 мin. Показания двух других акселерометров 1 и 2 из триады, т.е. величины A1 и А2, используются для вычисления угла поворота ϕ корпуса прибора вокруг продольной оси
Таким образом, каждому значению А3 при вращении корпуса прибора вокруг продольной оси будет соответствовать угол поворота ϕ3, а значению А3 мах будет соответствовать значение ϕ30. Таким образом, показания акселерометра 3 будут описываться выражением:
В общем случае, когда продольная ось корпуса 4 прибора располагается под углом α к горизонтальной оси, показания акселерометра описываются выражением:
A3 = A3α+A3гор•cosα,
где A3α - показания акселерометра, если его ось чувствительности в точности совпадает с продольной осью корпуса прибора.
Таким образом, чтобы скорректировать показания акселерометра 3, необходимо:
а) вычислить значения А3гор и cosα,
б) вычесть вычисленное значение корректирующего сигнала А3кор=А3горcosα из показаний акселерометра.
Угол наклона α вычисляется из выражения:
α = arc(sin А3),
где А3 - показания акселерометра.
Таким образом для вычисления значения корректирующего сигнала необходимо знать значения А3мах, А3мin и ϕ30. Величина ϕ3 вычисляется непрерывно по показаниям акселерометров 1 и 2 в вычислительном блоке 7.
Аналогичная методика используется для коррекции показаний акселерометров 1 и 2. В общем виде формула для коррекции i-го акселерометра описывается выражением:
Aiскор=Aiнескор-Aiгорcos(arcsin Aiнескор), где
Величины Aimax, Аimin и ϕi0 определяются при процедуре калибровки коррекции неперпендикулярности осей чувствительности акселерометров, а вычисление углов направления скважины производится в вычислительном блоке.
Таким образом, за счет коррекции первичных сигналов с измерителей напряженности поля существенно повышается точность измерения углов направления скважины.
Изобретение относится к промысловой геофизике и может быть использовано для определения наклона скважины, положения отклонителя бурового инструмента и азимута. Техническим результатом изобретения является повышение точности определения углов направления скважины. Для этого первичные сигналы с датчиков напряженности поля, размещенных в корпусе прибора (КП), подвергают коррекции. Сигналы для коррекции определяются поочередно для каждого датчика. Для одного датчика КП устанавливается горизонтально и производится его вращение вокруг продольной оси прибора. Направление поля (в данном случае гравитационного) будет ортогонально оси вращения. Если ось чувствительности датчика совпадает с продольной осью КП, то его показания должны быть равны 0 и при вращении КП вокруг этой оси эти показания не должны изменяться. В действительности ось чувствительности датчика из-за неизбежных погрешностей не совпадает с продольной осью КП. Вращая КП вокруг продольной оси, ось чувствительности датчика будет перемещаться по образующей конуса, высота которого совпадает с осью вращения и с продольной осью КП. Показания датчика 3 при этом будут изменяться от max до min. Показания двух других датчиков из триады используются для вычисления угла поворота КП вокруг продольной оси. 2 ил.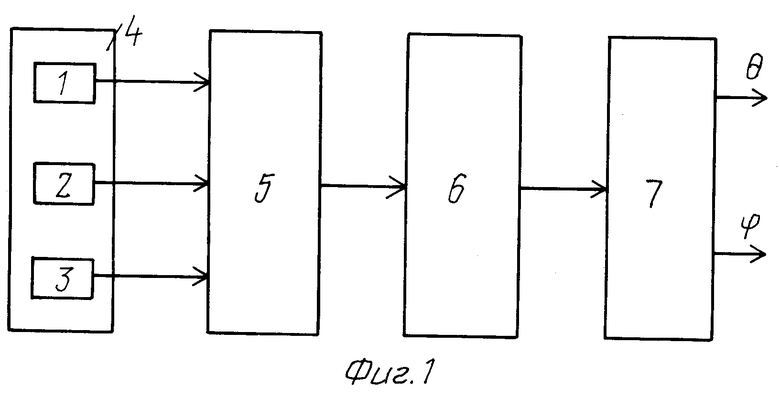
Способ определения углов направления скважины, включающий установку в корпус прибора трех взаимно ортогональных измерителей напряженности поля, причем ось чувствительности одного из них ориентируют по продольной оси прибора, замер первичных сигналов измерителей напряженности поля, по которым вычисляют углы направления скважины, отличающийся тем, что поочередно вращают корпус прибора относительно одной из трех взаимно ортогональных осей, каждая из которых должна совпадать с осью чувствительности измерителя напряженности, и направленной ортогонально направлению напряженности поля, определяют максимальные и минимальные значения сигналов с поочередно вращающихся измерителей напряженности поля в корпусе прибора и углы поворота вокруг оси вращения, соответствующие этим значениям, по этим величинам определяют погрешность измерения, обусловленную неортогональностью измерителей напряженности поля, и корректируют их первичные сигналы:
Aiскор=Aiнескор-Aiкор,
где Aiскор - скорректированная величина первичного сигнала измерителя напряженности поля;
Aiнескор - нескорректированная величина первичного сигнала измерителя напряженности поля;
Aiкор - величина сигнала коррекции;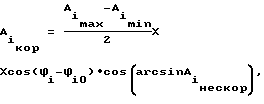
Aimax и Aimin - максимальная и минимальная величины сигналов измерителя напряженности поля при вращении вокруг своей оси;
ϕi - угол поворота вокруг оси вращения;
ϕi0 - угол поворота вокруг оси вращения, соответствующий величине Aimax.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНЫХ И ВИЗИРНЫХ УГЛОВ | 1997 |
|
RU2121574C1 |
| Преобразователь наклона скважины и угла установки отклонителя бурового инструмента | 1986 |
|
SU1328497A2 |
| Способ измерения положения снаряда в скважине | 1982 |
|
SU1076573A1 |
| Преобразователь наклона скважин и угла установки отклонителя бурового инструмента | 1983 |
|
SU1153050A2 |
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| Способ определения азимута | 1985 |
|
SU1388551A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1992 |
|
RU2057291C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ СКВАЖИНЫ (ВАРИАНТЫ) | 1994 |
|
RU2109943C1 |
| US 4164424 A, 07.08.1979 | |||
| КАТАЛИЗАТОР ДЛЯ ГИДРОПЕРЕАЛКИЛИРОВАНИЯ, | 0 |
|
SU384537A1 |
