Изобретение относится к средствам для проведения аварийно-спасательных работ.
Известно грузозахватное устройство (а.с. СССР №/1326539, 1987 г.), включающее траверсу с вертикальными стойками и центрирующими приспособлениями, захватные органы с наклонными направляющими с установленным на них ползуном с захватной скобой и механизмом фиксации захватных органов.
Наиболее близким техническим решением является захват-кантователь (см. а.с. СССР №1310326, 1987 г.), содержащий траверсу с вертикальными штангами, на свободных концах которых расположены кантующие блоки с грузозахватными органами, огибаемые кантующими тросами во взаимно противоположных направлениях, закрепленными одними концами на этих блоках и другими связанные с приводным барабаном, образуя единый тяговый орган и огибающие направляющие блоки, установленные симметрично в зоне верхних концов штанг.
Однако это устройство и другие подобные ему мало эффективны для захвата обломков бетонных, металлических, каменных, деревянных конструкций, лежащих в хаотичном положении по отношению к земле и друг к другу в развалах зданий и сооружений.
Данная задача решается за счет конструктивных дополнений прототипа еще одной промежуточной траверсой и силовыми и передаточно-исполнительными механизмами, позволяющими губкам захвата принимать в пространстве различное положение, облегчая захват обломков различных конструкций и других твердых предметов, находящихся на завале в хаотичном положении.
Сущность заключается в том, что грузозахватное устройство, содержащее П-образную несущую траверсу, грузозахватный орган, электрокабель питания и управления с устройством подвески на стреле крана, при этом внутри несущей траверсы на ее валу с возможностью вращения установлена прямоугольная рама, на которой установлены приборы освещения, световой сигнализации и электрозвонок, а грузозахватный орган выполнен в виде клещей, укрепленных с возможностью вращения на валу, закрепленном на прямоугольной раме, и имеет электродвигатель для пространственного перемещения клещей с пультом управления и гидравлический механизм сжатия и разжатия клещей, управляемый как электродвигателем, так и из крана по электрокабелю.
Сущность изобретения поясняется чертежами, где на
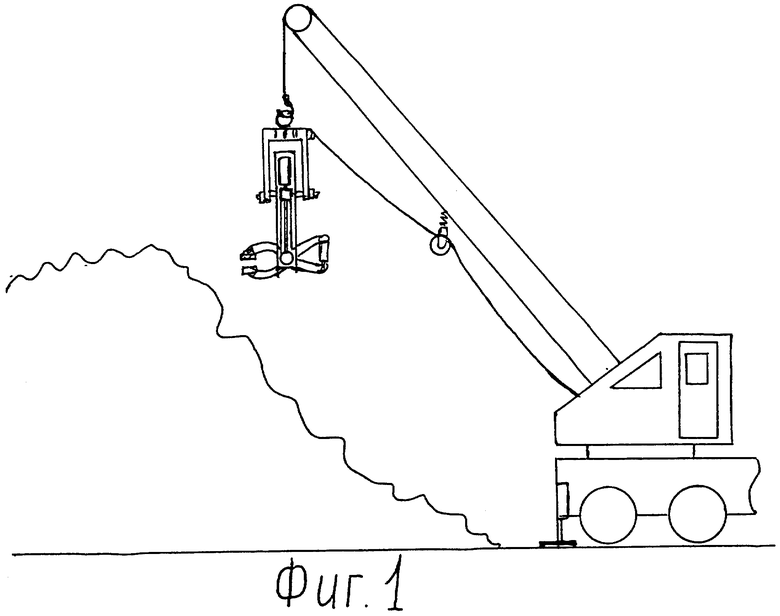
фиг.1 - общий вид захвата в работе;
фиг.2 - вид захвата;
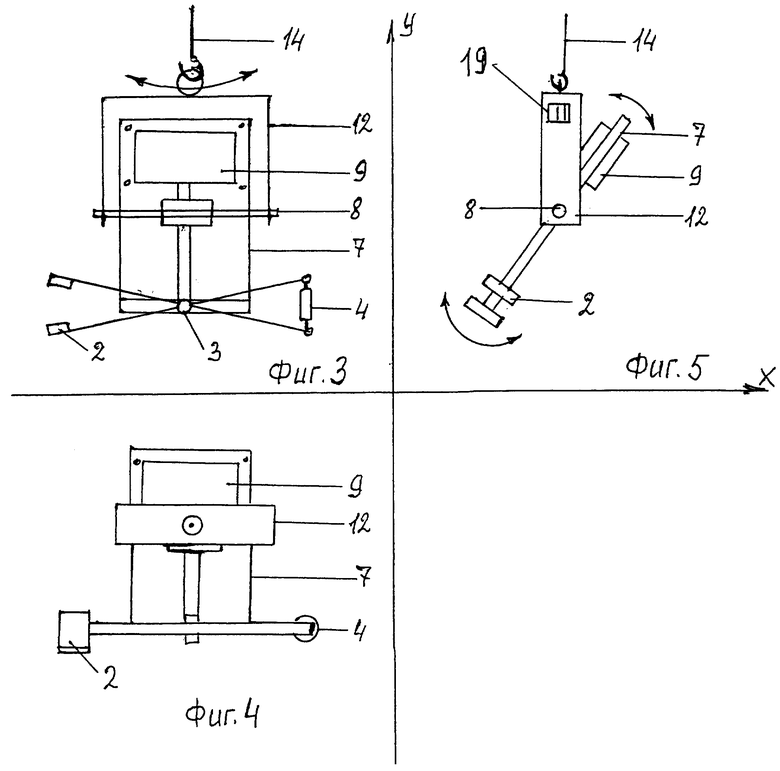
фиг.3 - вид захвата сбоку;
фиг.4 - вид захвата сверху;
фиг.5 - захват в работе.
Захват имеет клещи 1 с губками захвата 2, которые крепятся на валу 3, благодаря чему имеют возможность совершать вращательные движения в пределах не менее 120°. Сжимание и разжимание клещей 1 осуществляется с помощью гидравлического механизма 4, приводимого в действие электродвигателем 5 с передаточно-исполнительным механизмом 6. Клещи 1 укреплены в нижней части на прямоугольной раме, которая закреплена своей средней частью на валу 8, и может совершать вращательные движения на валу 8 в пределах не менее 180°. Благодаря электродвигателю 9 с передаточно-исполнительными механизмами 10, управляемыми с пульта управления 11, клещи 1 могут занимать в пространстве различное положение для удобства захвата обломков бетонных конструкций и других твердых предметов. Вал 8 укреплен на П-образной несущей траверсе 12, которая имеет поворотное кольцо 13, за которое подвешивается на крановый крюк 14. На П-образной несущей траверсе 12 установлен разъем 15 для подключения электрокабеля питания 16, который подвешивается с помощью шкива 17 на пружинной подвеске 18 к стреле подъемного крана, кроме того на П-образной несущей траверсе 12 установлены приборы световой сигнализации 19, электрозвонок 20, осветительные приборы 21.
Желательно сбалансировать относительно вала 8 вес нижней и верхней частей прямоугольной рамы вместе с установленным на ней оборудованием с точностью до 10-15 кг, чтобы можно было вручную придать прямоугольной раме (и губкам захвата 2) нужное положение.
Грузозахватное устройство работает следующим образом.
При необходимости быстро разобрать завал с большим количеством обломков бетонных конструкций и других твердых предметов на крюк 14 подъемного крана цепляют грузозахватное устройство, к нему подключают электрокабель питания 16, который подвешивают на шкиве 17 с пружинной подвеской 18 на стрелу подъемного крана.
Манипулируя стрелой и тросом подъемного крана, а также органами пульта управления 11, корректируя вручную положение захвата, добиваемся, чтобы положение губок захвата 2 оказались удобным для захвата предметов и удержания их. После этого с помощью органов пульта управления 11 отключаем механизм поворота клещей захвата 1.
Подаем сигнал крановщику на подъем груза с помощью приборов световой сигнализации 19. Разжатие губок захвата 2 осуществляет крановщик по электрокабелю 16. В условиях ограниченной видимости для повышения безопасности работ используем электрозвонок 19 и осветительные приборы 21.
Данное грузозахватное устройство позволяет значительно упростить и обезопасить процесс разборки с завала обломков бетонных конструкций и других твердых предметов и более эффективно проводить аварийно-спасательные работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крановое захватное устройство | 1978 |
|
SU664905A1 |
| БАШЕННЫЙ КРАН | 1990 |
|
RU2006449C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Устройство для гашения колебаний грузовой подвески крана | 1975 |
|
SU587085A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ | 1998 |
|
RU2149802C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| СПАСАТЕЛЬНАЯ СИСТЕМА ДЛЯ ВЫСОТНЫХ ЗДАНИЙ | 2004 |
|
RU2288759C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| ТРАНСПОРТНО-ЗАРЯЖАЮЩАЯ МАШИНА | 2000 |
|
RU2194234C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |

Изобретение относится к грузозахватным устройствам, в частности приспособленным для проведения аварийно-спасательных работ. Устройство содержит несущую П-образную траверсу, грузозахватный орган, электрокабель питания и управления с устройством подвески на стреле крана. Внутри несущей траверсы на ее валу с возможностью вращения установлена прямоугольная рама, на которой установлены приборы освещения, световой сигнализации и электрозвонок. Грузозахватный орган выполнен в виде клещей, укрепленных с возможностью вращения на валу, закрепленном на прямоугольной раме, и имеет электродвигатель для пространственного перемещения клещей с пультом управления и гидравлический механизм сжатия и разжатия клещей, управляемый как электродвигателем, так и из крана по электрокабелю. Технический результат – повышение безопасности и упрощение проведения аварийно-спасательных работ. 5 ил.
Грузозахватное устройство, содержащее несущую П-образную траверсу, грузозахватный орган, электрокабель питания и управления с устройством подвески на стреле крана, отличающееся тем, что внутри несущей траверсы на ее валу с возможностью вращения установлена прямоугольная рама, на которой установлены приборы освещения, световой сигнализации и электрозвонок, а грузозахватный орган выполнен в виде клещей, укрепленных с возможностью вращения на валу, закрепленном на прямоугольной раме, и имеет электродвигатель для пространственного перемещения клещей с пультом управления и гидравлический механизм сжатия и разжатия клещей, управляемый как электродвигателем, так и из крана по электрокабелю.
| Захват-кантователь | 1985 |
|
SU1382811A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 0 |
|
SU272515A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО СТРЕЛОВОГО МАНИПУЛЯТОРА ДЛЯ ПОГРУЗКИ ДЕРЕВЬЕВ | 0 |
|
SU187627A1 |
| Грузозахватное устройство | 1987 |
|
SU1463699A1 |
| Монтажная траверса | 1982 |
|
SU1013390A1 |
| Грузоподъемная траверса | 1984 |
|
SU1234344A1 |
| Захват-кантователь | 1983 |
|
SU1122605A1 |
| US 3905632 A1, 16.09.1975 | |||
| Устройство для управления электропотреблением предприятия | 1987 |
|
SU1429219A1 |

