Изобретение относится к способу и системам управления летательными аппаратами, вращающимися по углу крена, и может быть использовано в системах управления ракетами, формирующими на борту команды управления.
Известны способ формирования команд управления и система управления ракетой, основанная на нем (Патент России №2218540 от 03.01.02 г. МПК F 41 С 7/00, F 42 В 15/01), выбранные в качестве прототипа. Способ формирования команд управления заключается в том, что преобразуют на ракете принимаемое с пункта управления электромагнитное излучение в электрический сигнал, который декодируют по курсу и тангажу, преобразуют его в соответствии с разворотом ракеты по крену, а затем суммируют с сигналом обратной связи с выхода силового привода и из суммарного сигнала формируют широтно-импульсные модулированные команды управления ракетой.
Известная система управления ракетой, использующая этот способ, содержит аппаратуру пункта управления, а на ракете - последовательно соединенные приемник и аппаратуру разделения каналов и декодирования, выходы по тангажу и курсу которой через первый и второй блоки перемножения соответственно подключены к первому и второму входам преобразователя команд (координат), а также рулевой канал управления, в который входят последовательно включенные сумматор, корректирующий фильтр, триггер Шмидта и два ключевых усилителя мощности, входы которых соединены с выходом триггера Шмидта соответственно напрямую и через инвертор, при этом вход сумматора подключен к выходу преобразователя команд. Как следует из описания патента, преобразователь команд содержит датчик крена (вращения).
В известном способе формирования команд управления ракетой формируют из суммарного сигнала (преобразованного в соответствии с разворотом ракеты по углу крена и обратной связи) широтно-импульсные модулированные (ШИМ) команды управления ракетой, а в системе управления ракетой, основанной на этом способе, обратная связь реализуется с помощью потенциометра, с которого снимается напряжение, пропорциональное углу поворота руля, т.е. команды управления ракетой формируют с помощью сложной электромеханической системы автоматического регулирования.
Следовательно, недостатком известной системы управления ракеты и способа формирования команд, который она реализует, является недостаточно высокая надежность формирования широтно-импульсных модулированных команд управления ракетой из-за ее сложности и наличия электромеханических устройств.
Известны способ формирования линеаризированного сигнала и устройство для его реализации (Л.Фолкенберри "Применение операционных усилителей и линейных ИС", М.: Мир, стр.126-132, рис.6.2, 6.4), которые могут применяться для формирования команд управления на ракете, вращающейся по углу крена, и в системе, основанной на нем. В известном способе формирования линеаризированного сигнала интегрируют в интервале времени, равном длительности входного импульса, например кренового, его амплитуду (для однополярного сигнала) или размах, т.е. амплитуду от пика до пика (для двухполярного сигнала).
Недостатком известных способа и устройства формирования линеаризированного сигнала является зависимость амплитуды или размаха линеаризированного сигнала (на выходе интегратора) от длительности входных импульсов, т.е. низкая точность.
Задачей предлагаемой группы изобретений является повышение надежности (при повышении точности) при формировании широтно-импульсных модулированных команд управления.
Поставленная задача решается за счет того, что в способе формирования команд на ракете, вращающейся по углу крена, при котором формируют сигнал вращения, декодируют принимаемые командные сообщения, а затем вырабатывают из них команды управления ракетой по курсу и тангажу, дополнительно на ракете формируют из сигнала вращения линеаризированный сигнал, который с учетом угла крена ракеты сравнивают с декодированными значениями командных сообщений соответственно по курсу и тангажу и в результате сравнения формируют команды управления ракетой в виде широтно-импульсного модулированного сигнала, при этом величину размаха линеаризированного сигнала вырабатывают независимой от длительности сигнала вращения.
Система управления ракетой, вращающейся по углу крена, реализующая этот способ, содержит преобразователь координат, датчик крена, силовой привод, а также последовательно включенные приемник и аппаратуру разделения каналов и декодирования по курсу и тангажу, первый и второй выходы которой соединены соответственно с первым и вторым входами преобразователя координат; в нее введены логическая схема Исключающее ИЛИ, линеаризатор сигнала и релейный элемент, при этом третий и четвертый входы преобразователя координат соединены соответственно с первым и вторым входами логической схемы Исключающее ИЛИ и с первым и вторым выходами датчика крена, выход логической схемы Исключающее ИЛИ соединен со входом линеаризатора сигнала, при этом выход преобразователя координат соединен с первым входом релейного элемента, второй вход которого подключен к выходу линеаризатора сигнала, а выход релейного элемента подключен ко входу силового привода.
В способе формирования линеаризированного сигнала вырабатывают линеаризированный сигнал из креновых импульсов, при этом разбивают креновый период на временные интервалы, равные одной четверти кренового периода, измеряют длительность текущего временного интервала, по которой выставляют величину размаха линеаризированного сигнала, соответствующую последующему временному интервалу.
Линеаризатор сигнала содержит интегратор, введены формирователь ступенчатого сигнала и вычислитель, при этом информационный выход формирователя ступенчатого сигнала подключен к информационному входу вычислителя, управляющий выход формирователя ступенчатого сигнала соединен со входом управления интегратора, сигнальный вход интегратора подключен к выходу вычислителя.
В линеаризаторе сигнала формирователь ступенчатого сигнала может быть выполнен в виде последовательно включенных синхронизатора, логической схемы И, счетчика импульсов и регистра, последовательно соединенных первого, второго и третьего формирователя импульсов, а также "RS"-триггера, первый вход которого подключен к выходу первого формирователя импульсов, второй вход "RS"-триггера соединен с выходом третьего формирователя импульсов и входом установки в исходное состояние счетчика импульсов, выход второго формирователя импульсов соединен со входом записи регистра, при этом выход "RS"-триггера соединен со вторым входом логической схемы И и является управляющим выходом формирователя ступенчатого сигнала, выход регистра - информационным выходом, а вход первого формирователя импульсов является входом формирователя ступенчатого сигнала.
Заявленный способ формирования команд управления на ракете, вращающейся по углу крена, реализуется следующим образом. После старта ракета вращается по углу крена, при этом на ней формируют сигнал вращения, например в виде импульсов, период повторения которых соответствует развороту ракеты по углу крена на 360°. Длительность импульсов и их период повторения во времени определяются скоростью вращения ракеты вокруг своей оси.
На ракете декодируют принимаемые командные сообщения с пункта управления, формируют из сигнала вращения ракеты линеаризированный сигнал и сравнивают эти два сигнала (декодированный и линеаризированный) по амплитуде соответственно по курсу и тангажу с учетом угла крена. В результате сравнения, например с помощью компаратора, формируют команды управления по курсу и тангажу в виде широтно-импульсного модулированного сигнала. Для исключения влияния скорости вращения ракеты по углу крена на величину команд, величину размаха линеаризированного сигнала, т.е. величину амплитуды сигнала от пика до пика, вырабатывают независимой от длительности сигнала вращения.
Предлагаемое изобретение поясняется чертежами (фиг.1, 2, 3, 4).
На фиг.1 приведена структурная электрическая схема системы управления ракетой, вращающейся по углу крена, где представлены: 1 - приемник (П), 2 - датчик крена (ДК), 3 - аппаратура разделения каналов и декодирования по курсу и тангажу (АРКД), 4 - логическая схема Исключающее ИЛИ (ИСКЛ), 5 - преобразователь координат (ПК), 6 - линеаризатор сигнала (ЛС), 7 - релейный элемент (РЭ), 8 - силовой привод (СП).
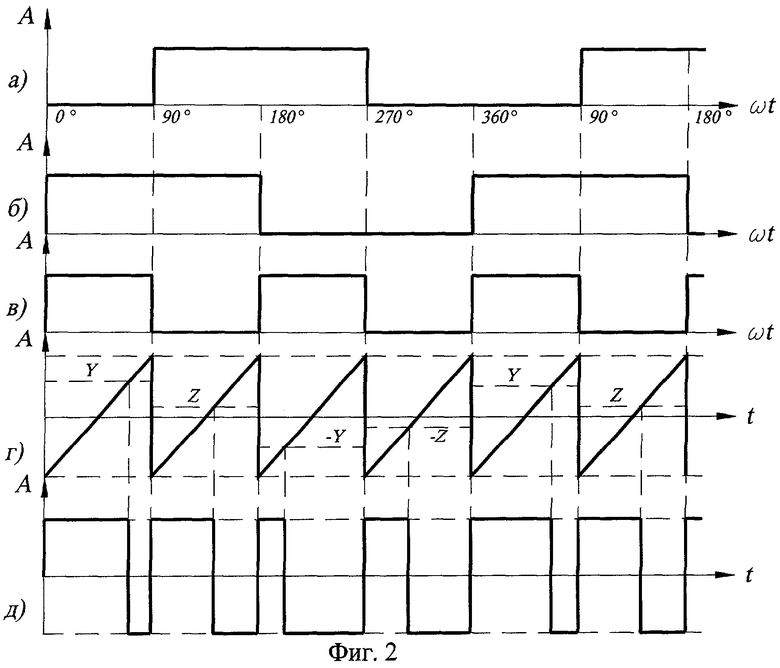
На фиг.2 приведены эпюры сигналов, где представлены: а - сигнал на первом выходе датчика крена 2; б - сигнал на втором выходе датчика крена 2; в - сигнал на выходе логической схемы Исключающее ИЛИ 4; г - сигнал на выходе линеаризатора сигнала 6 (сплошная линия) и на входе преобразователя координат 5 (пунктир); д - сигнал на выходе релейного элемента 7.
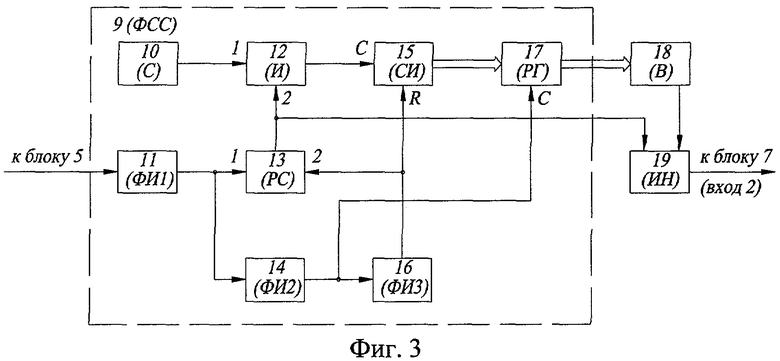
На фиг.3 приведена структурная электрическая схема линеаризатора сигнала 6, где представлены: 9 - формирователь ступенчатого сигнала (ФСС), 10 - синхронизатор (С), 11, 14 и 16 - соответственно первый, второй и третий формирователи импульсов (соответственно ФИ1, ФИ2 и ФИ3), 12 - логическая схема И (И), 13 - "RS"-триггер (PC), 15 - счетчик импульсов (СИ), 17 - регистр (РГ), 18 - вычислитель (В), 19 - интегратор (ИН).
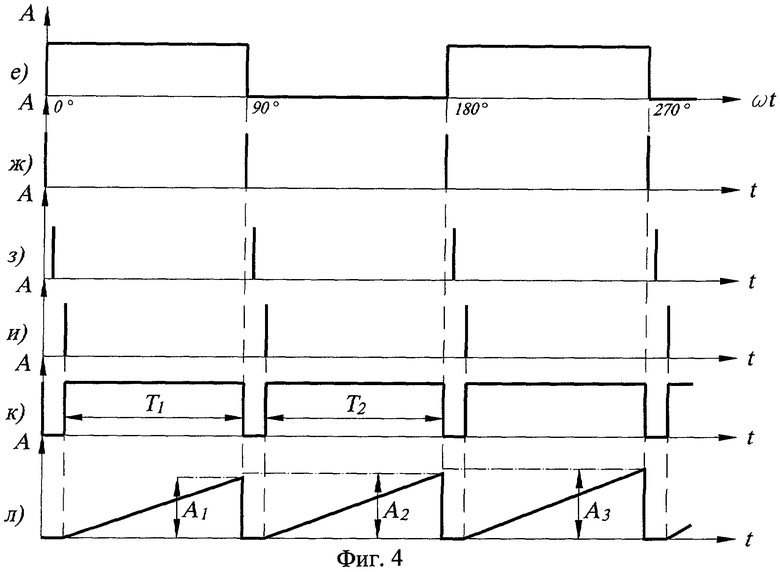
На фиг.4 приведены эпюры сигналов, где представлены: е - сигнал на входе первого формирователя импульсов 11; ж, з, и - сигналы на выходах соответственно первого 11, второго 14 и третьего 16 формирователей импульсов; к - сигнал на выходе "RS"-триггера 13; л - сигнал на выходе интегратора 19 (без смещения).
В системе управления ракетой, вращающейся по углу крена, выход приемника 1 соединен со входом аппаратуры разделения каналов и декодирования 3, которая подключена первым "Z" и вторым "Y" выходами соответственно к первому и второму входам преобразователя координат 5. Третий и четвертый входы преобразователя координат 5 соединены соответственно с первым и вторым входами логической схемы Исключающее ИЛИ 4 и соединены с первым и вторым выходами датчика крена 2. Выход логической схемы Исключающее ИЛИ 4 подключен ко входу линеаризатора сигнала 6. Выход преобразователя координат 5 подключен к первому входу релейного элемента 7, второй вход которого соединен с выходом линеаризатора сигнала 6, а выход релейного элемента 7 соединен со входом силового привода 8.
Приемник 1, аппаратура разделения каналов и декодирования по курсу и тангажу 4 могут быть выполнены, как в прототипе или как в ("Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., М.: Советское радио, 1973 г., стр.247, рис.4.28).
Датчик крена 2 может быть выполнен как позиционный гироскоп ("Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., М.: Советское радио, 1973 г., стр.49-52, рис.1.29), при этом оси ХГ и YГ меняют местами, а вместо механического потенциометра с токосъемником применяют оптоэлектронный с двумя парами свето - диод - фотодиод, разделяемыми непрозрачной цилиндрической поверхностью с прорезями, причем центр цилиндра, образующего эту поверхность, соединен с осью рамки (как в позиционном гироскопе), а две пары светодиод - фотодиод закреплены на корпусе гироскопа. При этом преобразователь координат 5 трансформируется в мультиплексор, на первый и второй коммутируемые входы которого подают сигналы "Y" и "Z", а на третий и четвертый - минус "Y" и минус "Z" (через инверторы). В аналоговом исполнении в качестве мультиплексора можно применить микросхему 564КП1 (один канал).
Логическая схема Исключающее ИЛИ 5 может быть выполнена на микросхеме 564ЛП2.
Релейный элемент 7 можно выполнить как компаратор либо цифровой сумматор, при этом знаковый разряд выходного двоичного числа (в параллельном коде) в сумматоре является выходом релейного элемента 7. Силовой привод 8 можно выполнить как релейный двухпозиционный с использованием двух электромагнитов, притягивающих поочередно якорь, связанный с рулями ракеты, при этом применяют две транзисторные выходные схемы (Л.И.Леоненко "Полупроводниковые формирующие схемы", М.: Энергия, 1974 г., стр.5, рис.1), работающие в противофазе.
Система управления ракетой, вращающейся по углу крена, работает следующим образом. В первоначальный момент времени, при пуске ракеты, бортовой источник питания выходит на рабочий режим. С момента схода ракеты с пусковой установки она начинает вращаться по крену, например, за счет разворота лопастей стабилизаторов ракеты, при этом датчик крена 2 начинает формировать две последовательности импульсов, приведенные на фиг.3 (эпюры а и б). Уровни и моменты изменения уровней этих импульсов соответствуют развороту ракеты по углу крена.
При попадании на вход приемника 1 излучения, например, с ВИМ-АМ, передаваемого по радиолинии или с ВИМ, передаваемого по оптической линии связи, приемник 1 преобразует это излучение в электрические импульсы с ВИМ.
Далее сигнал с выхода приемника 1 поступает на вход аппаратуры разделения каналов и декодирования по курсу и тангажу 3, где выделяются величины команд по курсу "Z" и тангажу "Y", соответствующие декартовой системе координат пункта управления. С выхода аппаратуры разделения каналов и декодирования по курсу и тангажу 3 сигналы, соответствующие величинам команд по курсу "Z" и тангажу "Y", поступают соответственно на первый и второй входы преобразователя координат 5, на третий и четвертый входы которого подаются сигналы соответственно с первого и второго выходов датчика крена 2 (эпюры а и б фиг.2). В соответствии с вращением ракеты по крену от 0° до 360° преобразователь координат 5 формирует на выходе в каждую четверть вращения ракеты по углу крена, т.е. 0°...90°, 90°...180°, 180°...270° и 270°...360° команды соответственно, например, "Y", "Z", минус "Y" и минус "Z", изображенные пунктиром на эпюре г фиг.2. Таким образом, команды из координат пункта управления, который передает команды наведения, преобразуются в команды, связанные с вращением декартовой системы координат ракеты.
Одновременно импульсы с первого и второго выходов датчика крена 2 поступают соответственно на первый и второй входы логической схемы "исключающее ИЛИ" 4, формирующей импульсы в каждую четверть крепового периода (эпюра в на фиг.2). Эти импульсы поступают на вход линеаризатора сигнала 6, который формирует сигнал, изображенный сплошной линией на эпюре г фиг.2.
Сигнал с выхода преобразователя координат 5 поступает на первый вход релейного элемента 7, на второй вход которого поступает пилообразный сигнал с выхода линеаризатора сигнала 6 (эпюра г на фиг.3). При равенстве этих двух сигналов формируется релейный сигнал (эпюра д на фиг.2), величина команды в котором (в каждую четверть кренового периода) определяется отношением длительностей положительной и отрицательной величин сигналов. Сигнал с выхода релейного элемента 7 поступает на силовой одноканальный привод 8, который при вращении ракеты по крену поочередно в каждую четверть кренового периода отрабатывает команду.
Заявленный способ формирования линеаризированного сигнала для формирования команд управления на ракете реализуется следующим образом. С момента старта ракеты она начинает вращаться по углу крена, например, за счет разворота лопастей стабилизаторов, при этом формируются креновые импульсы. Креновый период (0°...360°) разбивают с момента начала вращения ракеты и до окончания вращения на временные интервалы, равные одной четверти кренового периода, т.е. 0°...90°, 90°...180°, 180°...270°, 270°...360° и т.д. Из креновых импульсов (в течение каждого временного интервала) вырабатывают линеаризированный сигнал. Величина размаха этого сигнала (А), формируемого, например, интегратором (Л.Фолкенберри "Применение операционных усилителей и линейных ИС", Москва, 1985 г., стр.128), определяется как:

где U - величина сигнала на входе интегратора;
Т - длительность временного интервала, в течение которого действует U;
τ - постоянная времени интегратора.
Полет ракеты представляет собой винтовое движение, слагающееся из прямолинейного поступательного движения и вращения вокруг своей оси по углу крена (за счет стабилизаторов, создающих вращательное движение). При этом поскольку скорость полета ракеты изменяется, то изменяется длительность временного интервала Т, а значит, и величина размаха (для знакопеременного значения) или амплитуды (например, для положительного значения) сигнала А.
Для формирования ШИМ команд с помощью линеаризированного (пилообразного) напряжения ("Основы радиоуправления", под ред. Вейцеля В.А. и Типугина В.Н., М.: Сов. радио, 1973 г., стр.239, рис.4.22) требуется, чтобы А=const, при Т=var. Это можно достичь соответствующим изменением U при τ=const, следующим из выражения (1)
где К=-А·τ=const - коэффициент.
Поскольку величину U на входе интегратора выставляют с момента начала построения линеаризированного сигнала, то
где i=1, 2,..., n.
Таким образом измеряют в первоначальный момент времени временной интервал, равный, например, T1 (см. эпюру л на фиг.4), которому соответствует сигнал с амплитудой А1. По величине T1 на временном интервале Т2 выставляют на входе интегратора величину U2 для построения A2. Аналогичным образом измеряют Т2 и по ней выставляют на временном интервале Т3 величину U3 для построения А3 и т.д.
Следовательно, измеряют длительность текущего временного интервала, соответствующего одной четверти кренового периода, по которой выставляют величину размаха линеаризированного сигнала, соответствующую последующему временному интервалу.
Поскольку ракета сначала разгоняется, а в конце полета, когда выключен двигатель, ее скорость падает, то изменение величины Т носит монотонный характер, при этом ошибки выставления величин U1, U2,..., Un по предыдущим значениям Ti небольшие.
Как следует из изложенного выше, сигнал с амплитудой A0 должен строиться по предыдущему значению временного интервала, которое отсутствует. Поэтому на время действия первой четверти кренового периода рули ракеты можно блокировать, например, в среднем положении, либо задаться величиной Т0, определенной, например, экспериментально.
Форма линеаризированного сигнала, реализованного согласно заявленному способу, может быть выполнена в виде линейного нарастания амплитуды сигнала в течение одной четверти кренового периода и "мгновенного" уменьшения (как приведено на эпюре л фиг.4), при этом изменение величины размаха производится от минус А/2 до А/2 либо амплитуды от нулевого значения до А со смещением нулевого уровня на величину минус А/2 (путем суммирования).
Линеаризатор сигнала 6, реализующий заявленный способ формирования линеаризированного сигнала для формирования команд управления на ракете, вращающейся по углу крена, приведен на структурной схеме (фиг.3), где информационный выход формирователя ступенчатого сигнала 9 подключен к информационному входу вычислителя 18, управляющий выход формирователя ступенчатого сигнала 9 соединен со входом управления интегратора 19, сигнальный вход которого подключен к выходу вычислителя 18. При этом формирователь ступенчатого сигнала 9 выполнен в виде последовательно включенных синхронизатора 10, логической схемы И 12, счетчика импульсов 15, регистра 17 и цепи, состоящей из последовательно соединенных первого 11, второго 14 и третьего 16 формирователей импульсов. Первый вход "RS"-триггера 13 соединен с выходом первого формирователя импульсов 11. Второй вход "RS"-триггера 13 соединен с выходом третьего формирователя импульсов 16 и входом установки в исходное состояние счетчика импульсов 15. Выход второго формирователя импульсов 14 соединен со вторым входом логической схемы И 12 и является управляющим выходом формирователя ступенчатого сигнала 9. Выход регистра 17 является информационным выходом формирователя ступенчатого сигнала 9. Вход первого формирователя импульсов 11 является входом формирователя ступенчатого сигнала 9.
Синхронизатор 10 представляет собой кварцованный автогенератор импульсов. Первый формирователь импульсов 11 может быть выполнен как ждущий мультивибратор. Второй 14 и третий 16 формирователи импульсов могут быть выполнены каждый как два последовательно включенных ждущих мультивибратора. В качестве логической схемы И 12 "RS"-триггера 13 можно применить микросхемы соответственно 564ЛА7 и 564ТМ2. В качестве счетчика импульсов 15 и регистра 17 можно применить микросхемы соответственно 564ИЕ9 и 564ИР6. Вычислитель 18 можно выполнить на ПЗУ, например микросхеме 556РТ7. Интегратор 19 можно выполнить, как в прототипе.
Линеаризатор сигнала 6 работает следующим образом. При поступлении на вход формирователя ступенчатого сигнала 9, т.е. на вход первого формирователя импульсов 11 сигнала (эпюра е на фиг.4), он формирует из переднего и заднего фронтов этого сигнала импульсы (эпюра ж на фиг.4). Эти импульсы поступают на первый вход "RS"-триггера 13 и устанавливают на его выходе нулевой логический уровень, который поступает на второй вход логической схемы И 12 и запрещает прохождение импульсов с выхода синхронизатора 10 на счетный вход (вход "С") счетчика импульсов 15. Одновременно импульсы с выхода первого формирователя импульсов 11 поступают на вход второго формирователя импульсов 14, который формирует импульсы, задержанные относительно входных (эпюра з на фиг.4). Эти импульсы поступают на вход записи информации (вход "С") в регистр 17 и переписывают информацию, поступающую на информационный вход регистра 17 с выхода счетчика импульсов 15.
Одновременно импульсы с выхода второго формирователя импульсов 14 поступают на вход третьего формирователя импульсов 16, который формирует импульсы, задержанные относительно входных (эпюра и на фиг.4). Эти импульсы обнуляют по входу "R" счетчик импульсов 15 и по второму входу "RS" триггера 13 устанавливают на его выходе единичный логический уровень (эпюра к на фиг.4), который разрешает прохождение импульсов с синхронизатора 10 через логическую схему И 12 на счетный вход (вход "С") счетчика импульсов 15.
Таким образом, в течение единичного логического уровня на выходе "RS" триггера 13 счетчик импульсов 15 производит счет импульсов, при этом величина двоичного числа с выходов счетчика импульсов 15, переписываемая затем в регистр 17, прямо пропорциональна длительности одной четверти кренового периода, т.е. T1, Т2, Т3,..., Tn.
Двоичное число с выхода формирователя ступенчатого сигнала 9, т.е. с выхода регистра 17, поступает на вход вычислителя 18, который в соответствии с выражением (3) производит вычисление величины Ui.
Таким образом величина Ui, ступенчато регулируемая в каждую четверть кренового периода, при изменении скорости вращения ракеты по крену с выхода вычислителя 18 поступает на вход интегратора 19. В течение каждой четверти кренового периода интегратор 19 интегрирует величину напряжения и формирует линеаризированный сигнал (эпюра л на фиг.4). По окончанию кренового периода в моменты, когда на выходе "RS"-триггера 13 существует нулевой логический уровень, интегратор 19 обнуляется сигналом с выхода первого формирователя импульсов (эпюра е на фиг.4).
Следовательно, интегратор 19 формирует линеаризированный сигнал (эпюра л на фиг.4) с амплитудой A1 по величине интервала Т0, А2 по величине интервала T1 и т.д.
Поскольку для формирования команд требуется знакопеременный линеаризированный сигнал (эпюра г на фиг.2), то выходной сигнал можно, например, просуммировать с величиной, равной минус А/2 в блоке 19.
Как следует из изложенного выше, задержки, вносимые вторым 14 и третьим 16 формирователями импульсов, изображенные соответственно на эпюрах фиг.4 "з" и "и", в действительности чрезвычайно малы, т.е. длительности интервалов Ti=T1, Т2, Т3 и т.д. полностью совпадают (соответствуют)  .
.
В описании с целью упрощения и облегчения понимания работы системы управления ракетой и линеаризатора сигнала функционирование части узлов и блоков изложено для сигналов в цифровом либо аналоговом видах, что не принципиально. Однако реализованная система управления выполнена целиком на цифровой элементной базе за исключением приемника.
Таким образом предлагаемый способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой, его реализующая, за счет того, что на ракете формируют из сигнала вращения линеаризированный сигнал, который с учетом угла крена ракеты сравнивают с декодированными значениями командных сообщений соответственно по курсу и тангажу и в результате сравнения формируют команды управления ракетой в виде широтно-импульсного модулированного сигнала, при этом величину размаха линеаризированного сигнала вырабатывают независимой от длительности сигнала вращения, что повышает надежность формирования широтно-импульсных модулированных команд управления за счет исключения обратной связи.
В способе формирования линеаризированного сигнала и линеаризатора сигнала для реализации способа и системы управления ракетой, вращающейся по углу крена, за счет того, что вырабатывают линеаризированный сигнал из креновых импульсов, при котором разбивают креновый период на временные интервалы, равные одной четверти кренового периода, измеряют длительность текущего временного интервала, по которой выставляют величину размаха линеаризированного сигнала, соответствующей последующему временному интервалу, повышена точность за счет исключения зависимости амплитуды (размаха) линеаризированного сигнала от длительности импульсов на входе.
Изобретение относится к области вооружения, а именно к ракетной технике и, в частности, к ракетам, вращающимся по углу крена. Технический результат - повышение надежности формирования широтно-импульсных модулированных команд управления. Предложен способ формирования команд управления на ракете, вращающейся по углу крена, при котором на ракете формируют из сигнала вращения линеаризированный сигнал, который с учетом угла крена ракеты сравнивают с декодированными значениями командных сообщений соответственно по курсу и тангажу. В результате сравнения формируют команды управления ракетой в виде широтно-импульсного модулированного сигнала, при этом величину размаха линеаризированного сигнала вырабатывают независимой от длительности сигнала вращения. В систему управления ракетой, вращающейся по углу крена, введены логическая схема Исключающее ИЛИ, линеаризатор сигнала и релейный элемент, что повысило надежность формирования широтно-импульсных модулированных команд управления. Предложен способ формирования линеаризированного сигнала из креновых импульсов, при котором разбивают креновый период на временные интервалы, равные одной четверти кренового периода, измеряют длительность текущего временного интервала, по которой выставляют величину размаха линеаризированного сигнала, соответствующую последующему временному интервалу. В линеаризатор сигнала введены формирователь ступенчатого сигнала и вычислитель, что дополнительно повысило точность формирования линеаризированного сигнала, а значит, и точность формирования широтно-импульсных модулированных команд управления. Предложено выполнение формирователя ступенчатого сигнала в виде последовательно включенных синхронизатора, логической схемы И, счетчика импульсов и регистра, последовательно соединенных первого, второго и третьего формирователя импульсов, а также «RS»-триггера. 4 н. и 1 з.п. ф-лы, 4 ил.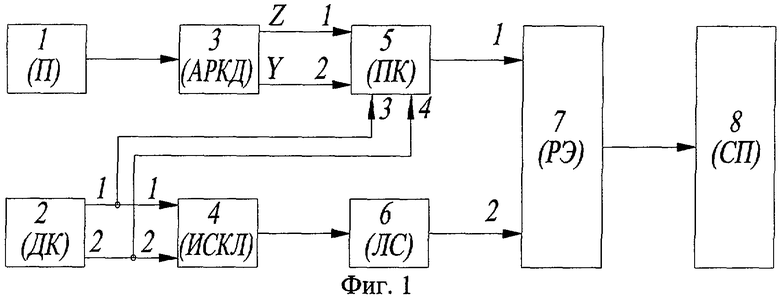
| СИСТЕМА УПРАВЛЕНИЯ СНАРЯДАМИ | 2002 |
|
RU2218540C2 |
| ФОЛКЕНБЕРРИ Л | |||
| Применение операционных усилителей и линейных ИС | |||
| - М.: Мир, 1985, с.126-133 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |
| ФОРМИРОВАТЕЛЬ ЛИНЕЙНО ИЗМЕНЯЮЩЕГОСЯ НАПРЯЖЕНИЯ | 2002 |
|
RU2210856C1 |
| US 4016498 А, 05.04.1977. | |||

