Изобретение относится к области радиолокации и может быть использовано в радиолокационной технике для оценки количества целей в группе.
Известен способ-аналог обнаружения групповой цели, который позволяет установить факт наличия групповой цели в импульсном объеме путем анализа квадратурных огибающих принятого антенной сигнала в частотой области [Гуськов Ю.И., Жибуртович Н.Ю., Абраменков В.В. и др. Способ обнаружения групповой цели / Ю.Н. Гуськов, Н.Ю. Жибуртович, В.В. Абраменков и др. - Патент РФ №2293349 C1].
Наиболее близким к предлагаемому изобретению (прототипом) является способ определения количества целей в группе, основанный на вычислении минимальной квадратичной невязки отсчетов комплексных корреляционных сумм выборки принятого сигнала и отсчетов эталонных корреляционных сумм сигнала одной цели и сравнения ее с порогом [Аганин А.Г., Белый Ю.И., Новиченок А.Б. и др. Способ определения количества целей в группе / А.Г. Аганин, Ю.И. Белый, А.Б. Новиченок и др. Патент РФ №2260196 C2]. Недостатком перечисленных технических решений является то, что при радиолокационном наблюдении маневрирующей цели, движущейся с радиальным ускорением а, искажается структура отраженного сигнала на выходе устройства первичной обработки в частотной и временной области, что приводит к ложному принятию одной ускоряющейся цели за групповую [см., например, Меркулов В.И. Динамичность авиационных комплексов и бортовые радиоэлектронные системы. // Радиотехника, 2010, №1].
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение вероятности правильного определения количества целей в группе при радиолокационном наблюдении маневрирующих целей.
Указанный технический результат достигается тем, что в известном способе определения количества целей в группе, заключающемся в аналого-цифровом преобразовании отраженного от целей и принятого сигнала, вычислении комплексных корреляционных сумм выборки принятого сигнала и опорных квадратурных сигналов при значениях параметра разрешения опорных сигналов, взятых на равномерной сетке, определении максимальных по ширине интервалов значений параметра разрешения, внутри которых все модули корреляционных сумм превышают порог обнаружения, определении локальных максимумов модулей корреляционных сумм, принятии решения о соответствии каждого локального максимума одной цели в тех интервалах, внутри которых количество локальных максимумов более одного, вычислении ширины интервала, внутри которого находится один локальный максимум, если ширина интервала меньше пороговой ширины, то вычислении минимальной квадратичной невязки отсчетов комплексных корреляционных сумм и отсчетов эталонных корреляционных сумм сигнала одной цели, если невязка меньше порога невязки, то принятии решения о соответствии локального максимума внутри интервала одной цели, в случае, если значение ширины интервала больше пороговой ширины или невязка больше порога невязки, то определяют величину радиального ускорения цели a r, и если a r=0, то принимают решение о соответствии локального максимума внутри интервала двум целям, а если a r≠0, то при определении минимальной квадратичной невязки используют отсчеты эталонных корреляционных сумм сигнала одной цели, движущейся с определенным радиальным ускорением a r, и если невязка меньше порога невязки, то принимают решение о соответствии локального максимума внутри интервала одной ускоряющейся цели, в противном случае - двум целям.
Указанный технический результат достигается тем, что радиальное ускорение цели может быть определено по формуле
 ,
,
где λ - длина волны, Tc - длительность зондирующего сигнала, Δω - положение максимума спектра сигнала SΔ(ω), получаемого по формуле
 ,
,
где сигналы S1(t) и S2(t) длительностью Tc/2 получают путем разделения по времени выборки принятого сигнала S(t) на две равные части, знаком ∗ - обозначена операция комплексного сопряжения.
Сущность предлагаемого способа заключается в следующем. Способ- прототип определения количества целей в группе показывает удовлетворительные результаты при радиолокационном наблюдении целей, движущихся с нулевым значением радиального ускорения относительно РЛС. В соответствии с ним обработка отраженного от цели сигнала начинается с преобразования его в цифровую форму и выполнения процедуры обнаружения цели, заключающейся в формировании отсчетов комплексных корреляционных сумм (ККС) выборки принятого сигнала и опорных квадратурных сигналов, вычислении модулей ККС и сравнении их с порогом обнаружения. Рядом стоящие отсчеты ККС, превысившие порог обнаружения, объединяются в интервалы, внутри которых определяются локальные максимумы. Если внутри интервала присутствуют несколько локальных максимумов, то принимается решение о количестве наблюдаемых целей, равном количеству локальных максимумов. При условии наличия одного локального максимума внутри интервала он может быть отражением как от одной цели, так и от двух, одновременно находящихся в импульсном объеме РЛС. Принятие решения о наблюдении одной или двух целей в способе-прототипе выполняется в два этапа. На первом этапе ширина интервала, содержащего локальный максимум, сравнивается с пороговым значением, и если она превосходит его, то принимается решение о наблюдении двух целей. На втором этапе, если ширина интервала соответствует одной цели, то анализируется форма огибающей отсчетов ККС в пределах интервала путем вычисления квадратичной невязки отсчетов ККС принятого сигнала и отсчетов эталонных ККС одной цели. Если невязка превышает порог, то это свидетельствует о существенном отличии принятого сигнала от эталонного сигнала одной цели, т.е. о наличии двух целей в импульсном объеме.
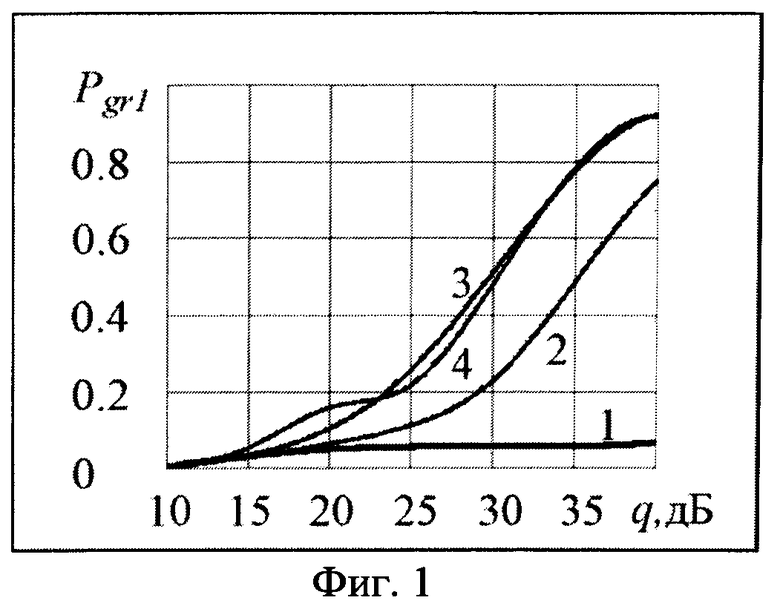
Радиальное ускорение, возникающее при маневре цели, приводит к появлению линейной частотной модуляции в отраженном сигнале. При этом искажается как ширина интервала, так и форма огибающей ККС сигнала, что приводит к значительному повышению вероятности ошибочного принятия одной ускоряющейся цели за две цели. Результаты моделирования подтверждают данную гипотезу. На фигуре 1 показана зависимость ошибочного принятия решения о наличии группы целей в импульсном объеме РЛС при условии наблюдения одной ускоряющейся цели Pgr1 от отношения сигнал/шум q. Характеристики 1, 2, 3, 4 соответствуют радиальному ускорению цели 0,2 g, 4 g и 10 g, где g - ускорение свободного падения, равное 9,81 м/с2 при длине волны 4 см [см., например, Филоненко В.В., Новиченок А.Б. Применение теории распознавания образов для определения наличия группы воздушных целей в разрешаемом объеме РЛС. Материалы XVIII Международной научно-технической конференции «Радиолокация, навигация, связь - 2012». Часть 3. - Воронеж: НПО «Саквоее», 2012. - С.1708-1715].
Для устранения этого явления в случаях, когда в способе-прототипе принимается решение о соответствии локального максимума двум целям, проверяется соответствие его одиночной ускоряющейся цели. Для этого по реализации входной выборки определяется величина радиального ускорения цели. Если цель неускоряющаяся (a r=0), то остается решение способа-прототипа о наблюдении двух целей. Если определено значение ускорения, равное величине a r≠0, то вычисляется минимальная квадратичная невязка отсчетов ККС принятого сигнала и отсчетов эталонных ККС сигнала одной цели, движущейся с определенным радиальным ускорением a r. Если невязка меньше порогового значения, то принимается решение о соответствии локального максимума одной ускоряющейся цели, если больше - двум. Отсчеты эталонных ККС одной цели, движущейся с разными значениями a r, должны быть заранее определены.
В заявляемом изобретении предлагается определять величину радиального ускорения цели фазоразностным методом [см., например, Лихачев В.П., Рязанцев Л.Б. Вероятностные характеристики индикатора маневра воздушной цели на основе фазоразностной оценки ускорения сближения. // Успехи современной радиоэлектроники, 2010 г. №11], отличающимся безынерцинноностью и невысокими вычислительными затратами. Суть метода заключается в следующем. Сигнал с выхода приемника длительностью Tc разделяется по времени на два сигнала S1(t) и S2(t) длительностью Tc/2, сигнал S2(t) комплексно сопрягается, и затем оба сигнала сдвигаются по времени на Tc/4 и перемножаются друг на друга:

Осуществив преобразование Фурье сигнала SΔ(t) по формуле

и оценив положение максимума Δω спектра SΔ(ω) по выражению

можно определить величину радиального ускорения по формуле

Последовательность операций, реализующая предлагаемый способ определения количества целей, показана на фигуре 2. Операции 1-5 полностью совпадают с операциями способа-прототипа. Операции 6-8 являются новыми существенными признаками изобретения, использование которых позволяет устранить указанный недостаток способа-прототипа.
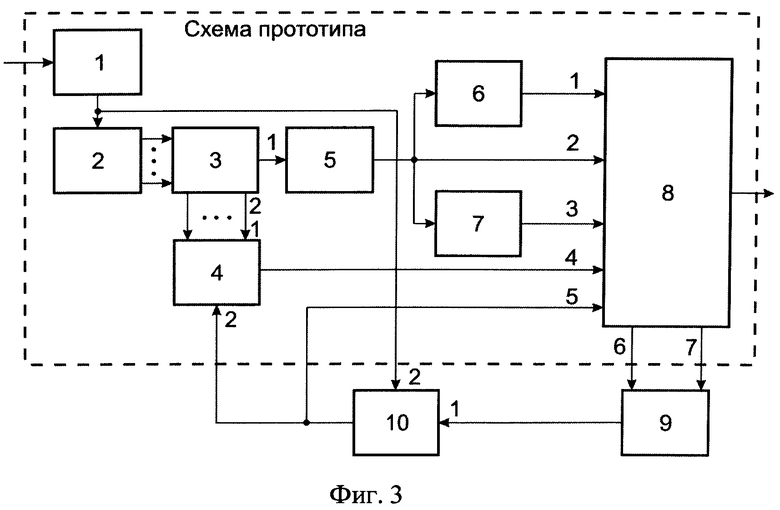
Способ может быть реализован, например, с помощью устройства, схема которого приведена на фиг.3, состоящего из блока АЦП 1, вычислителя корреляционных сумм 2, коммутатора 3, вычислителя невязки 4, вычислителя амплитуды 5, вычислителя локального максимума 6, вычислителя интервала 7, вычислителя количества целей 8, схемы «или» 9, вычислителя радиального ускорения 10.
Вычислитель радиального ускорения 10 предназначен для определения значения радиального ускорения цели относительно РЛС по входной выборке принятого сигнала и решает следующие задачи:
- разделение входной выборки S(t) длительностью Tc по времени на два сигнала S1(t) и S2(t) каждый длительностью Tc/2;
- комплексное сопряжение сигнала S2(t);
- сдвиг по времени на Tc/4 в противоположные стороны сигналов S1(t) и 
- поэлементное умножение сдвинутых сигналов;
- преобразование Фурье произведения сигналов;
- определение положения максимума результата преобразования Фурье;
- вычисление значения радиального ускорения цели по формуле (4).
Работа устройства не отличается от работы устройства способа-прототипа за исключением ситуации, когда в вычислителе количества целей 8 вычисленная ширина интервала превышает пороговую ширину или значение невязки превышает порог невязки. В этих случаях вычислитель количества целей 8 формирует единицу на выходах 6 или 7, которая через схему «или» 9 подается на первый вход вычислителя радиального ускорения 10 для его включения. На второй вход подаются отсчеты выборки принятого сигнала с АЦП 1. В вычислителе радиального ускорения 10 отсчеты выборки принятого сигнала S(t) разделяются по времени на две выборки: первая соответствует первой половине отсчетов (S1(t)), а вторая - второй половине (S2(t)). Далее с выборками S1(t) и S2(t) выполняются действия в соответствии с формулами (1-4). Вычисленное значение радиального ускорения цели подается на пятый вход вычислителя количества целей 8 и второй вход вычислителя невязки 4. При выполнении условия a r=0 вычислитель количества целей продолжает работу так же, как в устройстве способа-прототипа. Если a r≠0, то вычислитель невязки 4 вычисляет минимальную квадратичную невязку отсчетов ККС принятого сигнала, поступающих на его первый вход, и отсчетов эталонных ККС сигнала одной цели, движущейся с радиальным ускорением a r. Для этого в отличие от устройства способа-прототипа в постоянном запоминающем устройстве вычислителя невязки 4 предлагаемого устройства должны храниться предварительно вычисленные эталонные отсчеты ККС одной цели, движущейся с различными значениями радиального ускорения. Вычисленная невязка подается на четвертый вход вычислителя количества целей 8, там сравнивается с пороговым значением невязки. Если невязка меньше порогового значения, то значение регистра количества целей увеличивается на один, если больше, то на два.
Таким образом, предлагаемый способ определения количества целей в группе позволяет повысить вероятность правильной оценки числа целей в группе в условиях радиолокационного наблюдения маневрирующих целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА ЦЕЛЕЙ В ГРУППЕ | 2002 |
|
RU2260196C2 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ АДАПТИВНОЙ НАСТРОЙКИ КАНАЛОВ УСКОРЕНИЯ В МНОГОКАНАЛЬНОМ ОБНАРУЖИТЕЛЕ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2013 |
|
RU2542347C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ | 2004 |
|
RU2282209C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ ПРИ НАЛИЧИИ ПЕРЕМЕННОГО ДОПЛЕРОВСКОГО ЭФФЕКТА | 2009 |
|
RU2467350C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2154837C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационной технике для оценки количества целей в группе. Достигаемым техническим результатом является повышение вероятности правильного определения количества целей в группе при радиолокационном наблюдении маневрирующих целей. Указанный результат достигается тем, что при принятии решения о соответствии локального максимума двум целям, то есть при значении ширины интервала больше пороговой ширины или квадратичной невязки отсчетов комплексных корреляционных сумм принятого сигнала и отсчетов эталонных корреляционных сумм сигнала одной цели больше порога невязки, определяют величину радиального ускорения цели ar, если ar=0, то принимают решение о соответствии локального максимума двум целям, а если ar≠0, то при определении невязки используют отсчеты эталонных корреляционных сумм сигнала одной цели, движущейся с радиальным ускорением ar, если невязка меньше порога невязки, то принимают решение о соответствии локального максимума одной ускоряющейся цели, иначе - двум целям.1 з.п. ф-лы, 3 ил.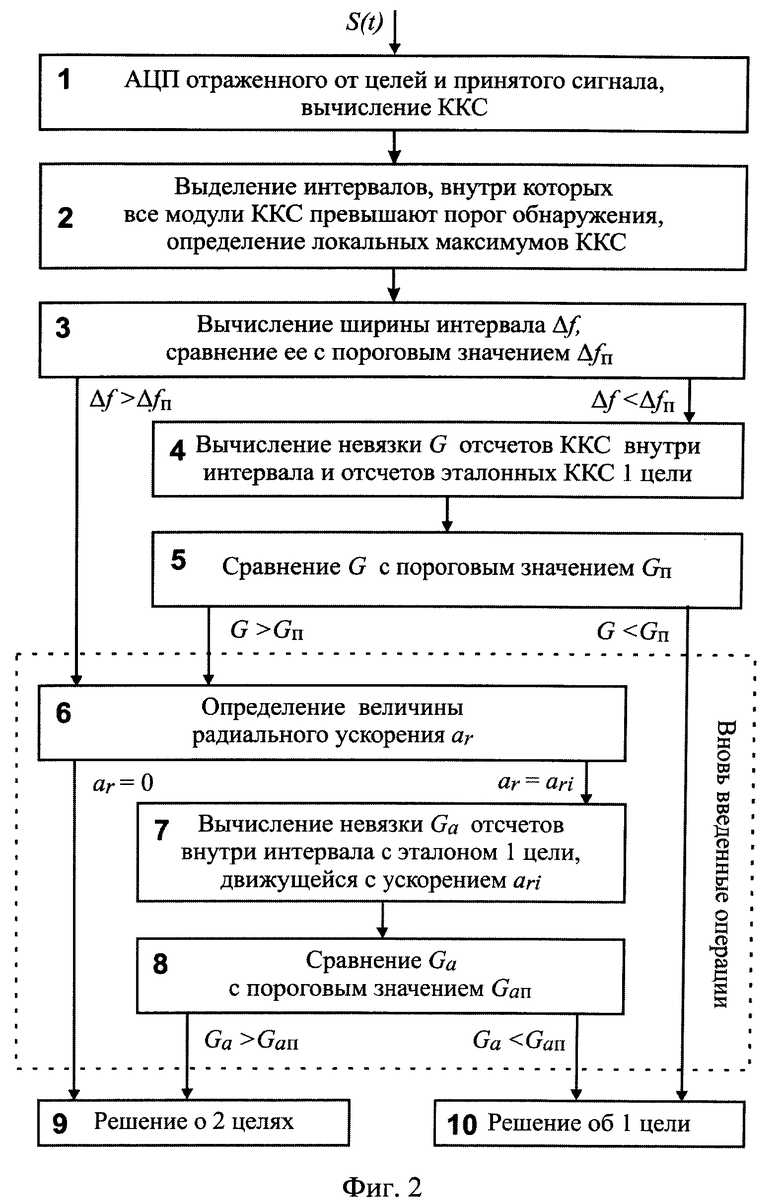
1. Способ определения количества целей в группе, заключающийся в аналого-цифровом преобразовании отраженного от целей и принятого сигнала, вычислении комплексных корреляционных сумм выборки принятого сигнала и опорных квадратурных сигналов при значениях параметра разрешения опорных сигналов, взятых на равномерной сетке, определении максимальных по ширине интервалов значений параметра разрешения, внутри которых все модули корреляционных сумм превышают порог обнаружения, определении локальных максимумов модулей корреляционных сумм, принятии решения о соответствии каждого локального максимума одной цели в тех интервалах, внутри которых количество локальных максимумов более одного, вычислении ширины интервала, внутри которого находится один локальный максимум, если ширина интервала меньше пороговой ширины, то вычислении минимальной квадратичной невязки отсчетов комплексных корреляционных сумм и отсчетов эталонных корреляционных сумм сигнала одной цели, если невязка меньше порога невязки, то принятии решения о соответствии локального максимума внутри интервала одной цели, отличающийся тем, что если значение ширины интервала больше пороговой ширины или невязка больше порога невязки, то определяют величину радиального ускорения цели a r, и если a r=0, то принимают решение о соответствии локального максимума внутри интервала двум целям, а если a r≠0, то при определении минимальной квадратичной невязки используют отсчеты эталонных корреляционных сумм сигнала одной цели, движущейся с определенным радиальным ускорением a r, и если невязка меньше порога невязки, то принимают решение о соответствии локального максимума внутри интервала одной ускоряющейся цели, в противном случае - двум целям.
2. Способ определения количества целей в группе по п.1, отличающийся тем, что радиальное ускорение цели определяют по формуле

где λ - длина волны, Tc - длительность зондирующего сигнала, Δω - положение максимума спектра сигнала SΔ(ω), получаемого по формуле

где сигналы S1(t) и S2(t) длительностью Tc/2 получают путем разделения по времени выборки принятого сигнала S(t) на две равные части, знаком * - обозначена операция комплексного сопряжения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА ЦЕЛЕЙ В ГРУППЕ | 2002 |
|
RU2260196C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧИСЛА РАЗРЕШАЕМЫХ ВОЗДУШНЫХ ЦЕЛЕЙ В ГРУППЕ | 1999 |
|
RU2158005C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА, СКОРОСТИ И ДАЛЬНОСТИ ЦЕЛЕЙ И АМПЛИТУД ОТРАЖЕННЫХ ОТ НИХ СИГНАЛОВ ПО ОТВЕТНОМУ СИГНАЛУ В ЦИФРОВОМ КАНАЛЕ РАДИОЛОКАТОРА | 2010 |
|
RU2444758C1 |
| US 5587929 A, 24.12.1996 | |||
| Снегомусороуборочная машина для очистки железнодорожных путей | 1973 |
|
SU530088A1 |
| WO 2009137441 A1, 12.11.2009 | |||

