Изобретение относится к области машиностроения и может применяться в системах управления объектов, преимущественно размещаемых на подвижных средствах.
Известны изобретения, в которых орган управления связан передающими элементами с датчиками координат, размещенными в неподвижном корпусе.
Механизм перемещения курсора (а.с. №1206765, МПК G 05 G 9/00) содержит орган управления - рычаг, связанный с системой колец, имеющих возможность поворота вокруг взаимно перпендикулярных осей и перекрывающих в большей или меньшей степени свет от источников излучения в приемники, чем и обеспечивается изменение величины электрических сигналов, поступающих на объект управления.
Устройство ручного управления (а.с. №1432488, МПК G 05 G 1/00) содержит орган управления - шар, установленный с возможностью вращения, сопряженный с передающими дисками, оси вращения которых взаимно перпендикулярны. Вращение шара передается на диски и преобразуется датчиками в соответствующие электрические выходные сигналы управления.
Недостатком этих устройств, проявляющимся при их размещении на подвижных средствах, работающих в условиях воздействия вибрационных нагрузок (вертолеты, самолеты, суда, наземные подвижные средства), является произвольное перемещение органа управления, которое через передающие элементы вызывает несанкционированное (ложное) изменение информации, поступающей от датчиков декартовых координат. В этих условиях оператор вынужден постоянно держать руку на органе управления или систематически вводить корректирующие воздействия на орган управления, что затрудняет его работу. Как правило, функции оператора совмещаются с другими функциями. Например, при размещении устройства управления на вертолете функцию оператора выполняет штурман, которому по роду выполняемых работ необходимо часто снимать руку с органа управления устройства. Кроме того, указанные устройства сложны по конструкции, имеют большие массогабаритные характеристики.
Наиболее близким по конструкции устройством, принятым за прототип, является устройство управления курсором по патенту США №4464652 (МПК G 09 G 1/00), содержащее орган управлении - шар, опирающийся на два валика с взаимно перпендикулярными осями и на ролик, ось которого расположена под углом к осям валиков, расположенные в корпусе с возможностью вращения, и диски с прорезями, установленные на валиках и взаимодействующие с датчиками декартовых координат. Устройство отличается простотой конструкции и малыми массогабаритными характеристиками.
Однако это устройство предназначено для работы в стационарных условиях, без воздействия вибрационных нагрузок, причем управляющим движением является перемещение самого корпуса устройства. Такая конструкция неприемлема для установки на подвижных средствах.
Техническим результатом предлагаемого изобретения является исключение ложной информации от датчиков из-за произвольного перемещения органа управления - шара под воздействием вибрационных нагрузок на устройство. Технический результат достигается путем введения плоских пружин, взаимодействующих с валиками и создающих момент трения, превышающий крутящий момент, передаваемый шаром на валики при произвольном перемещении органа управления. Корпус устройства закреплен неподвижно с возможностью свободного вращения шара.
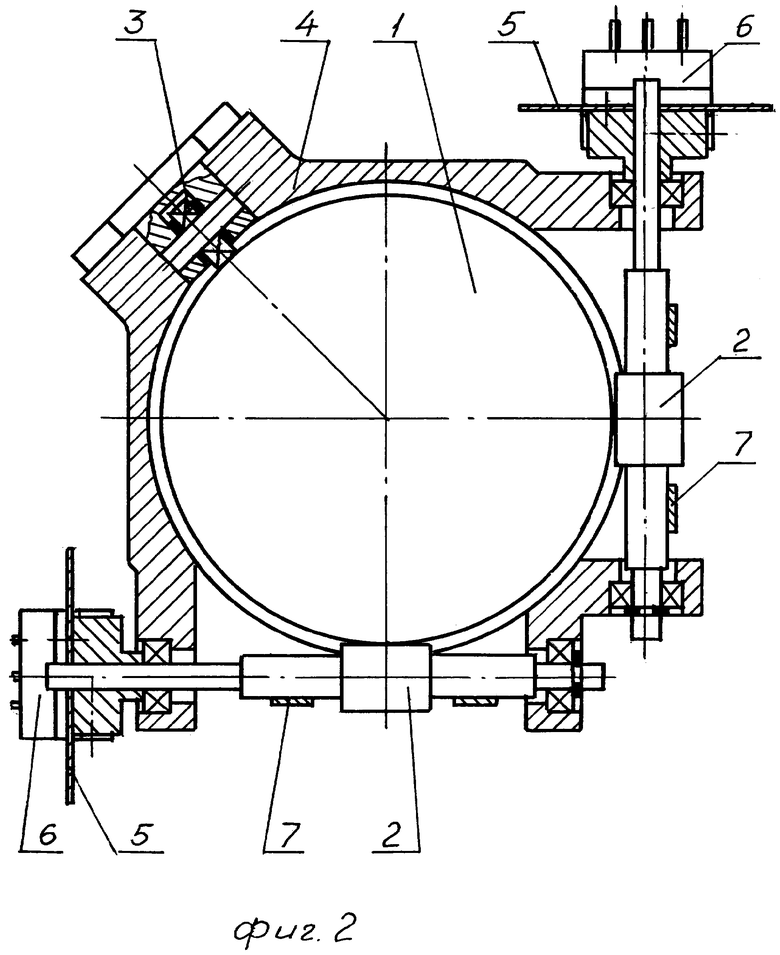
На фиг.1 представлен вид заявляемого устройства сбоку.
На фиг.2 - разрез устройства горизонтальной плоскостью.
На фигурах приняты следующие обозначения:
1 - шар;
2 - валики;
3 - ролик;
4 - корпус;
5 - диски;
6 - датчики;
7 - плоские пружины.
Устройство ручного управления содержит шар 1, опирающийся на два валика 2 с взаимно перпендикулярными осями и на ролик 3, ось которого расположена под углом к осям валиков 2, которые размещены в корпусе 4 с возможностью вращения. На валиках 2 закреплены диски 5 с прорезями, которые взаимодействуют с датчиками 6 декартовых координат, укрепленными на корпусе 4. С валиками 2 взаимодействуют плоские пружины 7, усилие поджатая которых создает момент трения, превышающий крутящий момент, передаваемый шаром 1 на валики 2 при вибрационных нагрузках. При этом корпус 4 закреплен неподвижно.
Устройство ручного управления работает следующим образом.
При воздействии руки оператора на шар 1 преодолевается момент трения, создаваемый пружинами 7, валики 2 с дисками 5 начинают вращаться, что приводит к соответствующему изменению информации от датчиков 6.
При свободном от воздействия руки оператора шаре 1 его произвольное перемещение от вибрационных нагрузок не передается валикам 2, т.к. крутящий момент, создаваемый шаром 1, меньше момента трения, создаваемого пружинами 7. При этом валики 2 с дисками 5 не вращаются и информация, поступающая от датчиков 6 декартовых координат, не изменяется.
Таким образом, с введением плоских пружин, устройство ручного управления может применяться в системах управления, размещаемых на подвижных средствах. Устройство является простым по конструкции, имеет небольшие массогабаритные характеристики, что существенно при его размещении на летательных аппаратах.
Устройство нашло применение в ряде изделий, разрабатываемых предприятием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ручного управления | 1980 |
|
SU955002A1 |
| Имитатор входного механического импеданса руки человека-оператора | 1980 |
|
SU979934A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1997 |
|
RU2117900C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| МАНИПУЛЯТОР "САМОХОДНАЯ ЧЕРЕПАХА ПРОХОРОВА WONDERTURTLE" (ВАРИАНТЫ) | 1999 |
|
RU2197746C2 |
| Стенд для испытаний ручных механизированных инструментов вращательного действия | 1981 |
|
SU1024256A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ КУРСОРА НА ЭКРАНЕ ДИСПЛЕЯ | 1993 |
|
RU2042208C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
Изобретение относится к области машиностроения и может быть использовано в системах управления, размещаемых преимущественно на подвижных средствах. Техническим результатом изобретения является исключение ложной информации от датчиков из-за произвольного перемещения органа управления - шара под воздействием вибрационных нагрузок на устройство. Устройство ручного управления содержит шар, фрикционно связанный с двумя валиками с взаимно перпендикулярными осями, размещенными в корпусе с возможностью вращения. На валиках закреплены диски с прорезями, которые взаимодействуют с датчиками декартовых координат. Технический результат достигается за счет введения плоских пружин, усилие поджатия которых создает момент трения, превышающий крутящий момент, передаваемый шаром на валики при вибрационных нагрузках, причем корпус устройства закреплен неподвижно. 2 ил.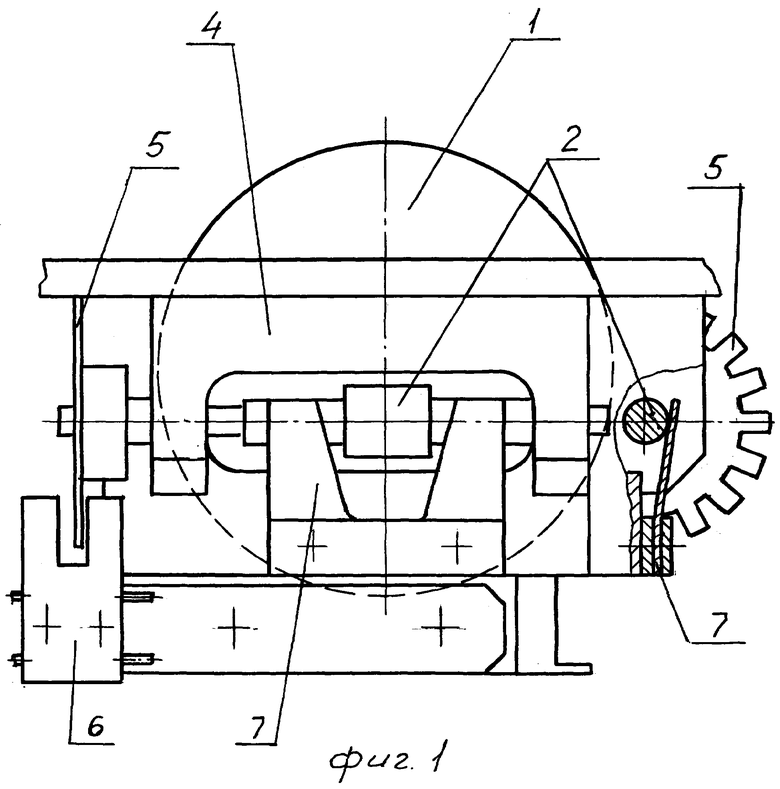
Устройство ручного управления, содержащее шар, фрикционно связанный с двумя валиками с взаимно перпендикулярными осями, размещенными в корпусе с возможностью вращения, диски с прорезями, установленные на валиках и взаимодействующие с датчиками декартовых координат, укрепленными в корпусе, отличающееся тем, что в него введены плоские пружины, взаимодействующие с валиками и создающие момент трения, превышающий крутящий момент, передаваемый шаром на валики при его произвольном перемещении под воздействием вибрационных нагрузок, а корпус закреплен неподвижно с возможностью управления шаром.
| US 4464652 A1, 07.08.1984 | |||
| Устройство ручного управления | 1980 |
|
SU955002A1 |
| RU 94020862 A1, 20.04.1996 | |||
| Устройство ручного управления | 1987 |
|
SU1432488A1 |
| Механизм перемещения курсора | 1983 |
|
SU1206765A1 |
| US 3987685 A, 26.10.1976 | |||
| US 5280276 A, 18.01.1994 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

