Данное изобретение относится к двуногому локомоционному роботу.
Гуманоидный робот, в частности двуногий локомоционный робот, разработан в качестве автономно перемещающейся машины, способной работать в окружающих условиях для человека с целью выполнения сложных действий, таких как деятельность по уходу за домом, и спасательная деятельность на пожаре вместо людей. Как показано на фиг.1, такой робот состоит из системы, состоящей из множества элементов (голова 101, туловище 102 и ноги 103), каждый из которых находится под подчиненным управлением, основанным на множестве шарнирных соединений, и системы координации элементов, которая координирует систему элементов (шарнирные соединения 104, 105, 106, 107, 108 и 109 в качестве одно-, двух- и трехосевых систем вращения). Полное управление системой из множества элементов и системой координирования элементов описывается на основе множества переменных, относящихся к каждой системе, и множества параметров. Однако сложно разделять с высокой точностью независимость и подчиненность между различными переменными, в особенности на этапе разработки. Также сложно описывать движение поднятия ноги и движение постановки ноги при ходьбе.
Когда теоретическое движение при ходьбе и действительное движение при ходьбе не совпадают друг с другом, то анализируют, от какой из переменных зависит это расхождение. Однако механические элементы из множества элементов имеют физические параметры, и, в частности, жесткость и масса каждого элемента оказывают важное воздействие на движение ходьбы. Поэтому сложно теоретически анализировать, зависит ли нестабильность управления от массы головы или от жесткости корпуса или ноги. Кроме того, когда каждый механический элемент изготовлен не в соответствии с теорией, то выполнение анализа становится особенно сложным.
Поэтому важно конструировать двуногий локомоционный робот так, чтобы диапазоны изменения параметров всех элементов были ограничены заранее с учетом физических характеристик связи между элементами, с целью упрощения анализа и обеспечения качества конструкции. В частности, важно обеспечить эффективное ослабление взаимного влияния между сложными системами вращения. Определение разумных правил по регулированию и инициализации механического исходного положения, определяющего первоначальное условие движения, имеет еще большее значение для обеспечения качества конструкции.
Задачей данного изобретения является создание самоуправляемого двуногого локомоционного робота небольшого размера.
Другой задачей данного изобретения является создание двуногого локомоционного робота, в котором анализ движения является простым.
Также задачей данного изобретения является создание двуногого локомоционного робота, в котором инициализация составной системы координат является простой.
Задачей данного изобретения также является создание двуногого локомоционного робота, в котором можно лучше реализовать управление всей системой движения.
Согласно одному аспекту данного изобретения двуногий локомоционный робот содержит опорную часть корпуса, верхнюю часть корпуса, жестко соединенную с опорной частью корпуса, две ноги, соединенные с возможностью движения с опорной частью корпуса, ступню, соединенную с возможностью движения с каждой из двух ног, голову, соединенную с возможностью движения с верхней частью корпуса, и две руки, соединенные с возможностью движения с верхней частью корпуса. Желательно, чтобы опорная часть корпуса действовала в качестве механического исходного положения.
Двуногий локомоционный робот может дополнительно содержать две рукоятки, предусмотренные для крепления на противоположных сторонах опорной части корпуса. Таким образом, улучшается технологичность изготовления и обслуживания.
Кроме того, центр тяжести двуногого локомоционного робота предпочтительно расположен между вертикальными плоскостями, каждая из которых проходит через соответствующие концы частей крепления рукояток к опорной части корпуса, когда двуногий локомоционный робот находится в исходном положении.
Кроме того, каждая из двух ног может состоять из первого звена, действующего в качестве опоры опорной части корпуса через первую шарнирную часть, и второго звена, действующего в качестве опоры для первого звена через вторую шарнирную часть. В этом случае предпочтительно, чтобы ось горизонтального вращения первой шарнирной части и ось горизонтального вращения второй шарнирной части находились между вертикальными плоскостями, каждая из которых проходит через соответствующие концы частей крепления двух рукояток к опорной части корпуса, когда двуногий локомоционный робот находится в исходном положении. Кроме того, каждая ступня может служить опорой для соответствующего второго звена через третью шарнирную часть. Предпочтительно, чтобы горизонтальная ось вращения третьей шарнирной части была расположена между вертикальными плоскостями, каждая из которых проходит через соответствующие концы частей крепления двух рукояток к опорной части корпуса, когда двуногий локомоционный робот находится в исходном положении.
Кроме того, когда каждая из двух ног содержит первое звено, предусмотренное для опоры опорной части корпуса через первую шарнирную часть, и второе звено, предусмотренное для опоры первого звена через вторую шарнирную часть, предпочтительно, чтобы жесткость первого звена была меньше жесткости опорной части корпуса, а жесткость второго звена была меньше жесткости первого звена. Предпочтительно, чтобы первая шарнирная часть имела вертикальную ось вращения.
Кроме того, предпочтительно, чтобы первая шарнирная часть имела вертикальную ось вращения.
Кроме того, предпочтительным является то, что верхняя часть корпуса соединена с опорной частью корпуса с образованием зоны зазора между верхней частью корпуса и опорной частью корпуса, и источник энергии был расположен в зоне зазора.
Кроме того, двуногий локомоционный робот может дополнительно включать блок управления, установленный сзади верхней части корпуса.
Кроме того, согласно другому аспекту данного изобретения, двуногий локомоционный робот содержит опорную часть корпуса, два первых звена для опоры опорной части корпуса через первую шарнирную часть, и второе звено для опоры соответствующего первого звена через вторую шарнирную часть. Жесткость первого звена меньше жесткости опорной части корпуса, и жесткость второго звена меньше жесткости первого звена. Кроме того, двуногий локомоционный робот дополнительно содержит ступню для опоры соответствующего второго звена через третью шарнирную часть. Механическое усилие, передаваемое мгновенно через систему двойного маятника (3, 4, 7, 8) между опорной частью корпуса и ступней, ослабляется или демпфируется при постановке ступни. Таким образом, управление механическим исходным положением для системы управления опорной частью корпуса становится простой. В результате, становится простым позиционирование второго звена. Дополнительно к этому, становится простым позиционирование ступни, соединенной со вторым звеном с минимальной жесткостью.
Согласно другому аспекту данного изобретения двуногий локомоционный робот содержит опорную часть корпуса, в которой установлено механическое исходное положение, первое звено для опоры опорной части корпуса через первую шарнирную часть, второе звено для опоры первого звена через вторую шарнирную часть и третье звено для опоры второго звена через третью шарнирную часть. Опорная часть корпуса снабжена рукоятками, при этом рукоятки соединены с опорной частью корпуса в двух местах. Желательно, чтобы центр тяжести (G) робота был расположен между вертикальными плоскостями, проходящими через два места крепления, при инициализации всей позы относительно механического исходного положения. В результате, момент вращения, когда весь робот перемещается, является небольшим, так что устойчивость робота высокая и перемещение робота является простым. В случае инициализации желательно, чтобы ось вращения первой шарнирной части, ось вращения второй шарнирной части и ось вращения третьей шарнирной части были расположены между двумя вертикальными плоскостями. В частности, два положения, соответствующие двум вертикальным плоскостям, заданы как два разных положения в переднем направлении в случае инициализации. Предпочтительным является то, что рукоятки образуют базовую плоскость для механического исходного положения в случае инициализации, а поверхность постановки стопы выполнена с возможностью регулирования на основе базовой поверхности рукоятки. В частности, посредством регулирования стоп, так чтобы базовая плоскость рукояток была параллельна поверхностям постановки ступней, становится простой регулировка ступней относительно исходной точки. Момент вращения, когда весь робот перемещается, является небольшим, так что устойчивость робота высокая и перемещение робота является простым. В случае инициализации желательно, чтобы ось вращения первой шарнирной части, ось вращения второй шарнирной части и ось вращения третьей шарнирной части были расположены между двумя вертикальными плоскостями. В частности, два положения, соответствующие двум вертикальным плоскостям, задаются в качестве двух разных положений в переднем направлении в случае инициализации. Желательно, чтобы рукоятки образовывали базовую плоскость для механического исходного положения в случае инициализации, и поверхность постановки ступни можно было регулировать на основе базовой плоскости рукоятки. В частности, за счет регулирования ступней так, чтобы опорная плоскость рукояток была параллельна поверхностям постановки ступней, регулировка ступней относительно точки источника становится простой. Рукоятки могут быть расположены снаружи корпуса в виде покрытия части корпуса и могут быть видимыми снаружи. Тем самым упрощается обычная работа по инициализации.
Согласно другому аспекту данного изобретения двуногий локомоционный робот состоит из опорной части корпуса, верхней части корпуса, опирающейся на опорную часть корпуса, первых звеньев для соответствующей опоры опорной части корпуса через первые шарнирные части, вторые звенья для соответствующей опоры первых звеньев через вторые шарнирные части, ступни для соответствующей опоры вторых звеньев через третьи шарнирные части и верхней части, опирающейся на верхнюю часть корпуса через четвертую шарнирную часть. Верхняя часть корпуса соединена с опорной частью корпуса с большой жесткостью, а руки и голова опираются на верхнюю часть корпуса через шарнирные части. Таким образом, жесткость опорной структуры для опоры головы и рук можно сохранять высокой. Верхняя часть корпуса опирается на опорную часть корпуса через отрезки боковых пластин с образованием зоны зазора, и источник энергии (батарея элементов и т.д.) расположен в зоне зазора. Таким образом, эффективность использования пространства является высокой.
В опорной части корпуса предусмотрены множество различных отверстий и крепежная структура для соединения верхней части и нижней части. Поэтому опорная часть корпуса выполнена в виде единого целого из толстого легкого сплава. Можно использовать подходящую усиливающую структуру для опорной части корпуса.
На чертежах показано:
фиг.1 - обычный двуногий локомоционный робот в изометрической проекции;
фиг.2 - часть двуногого локомоционного робота, согласно варианту выполнения данного изобретения, в изометрической проекции;
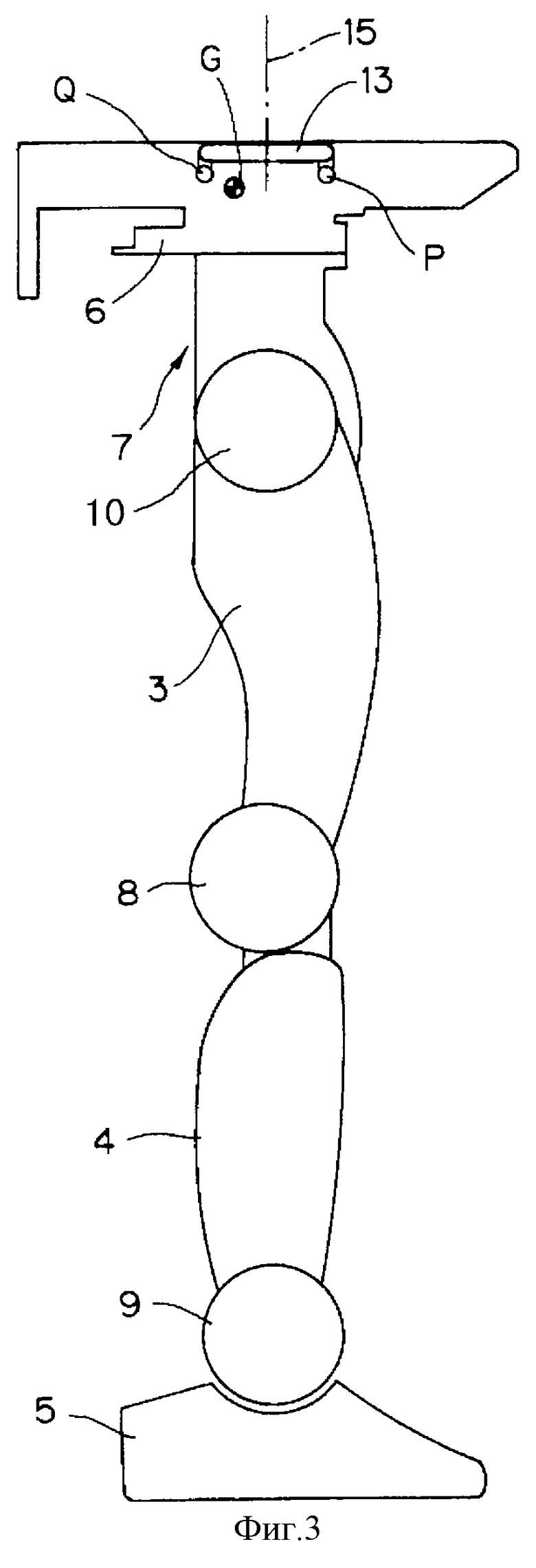
фиг.3 - нога робота, показанного на фиг.2, на виде сбоку;
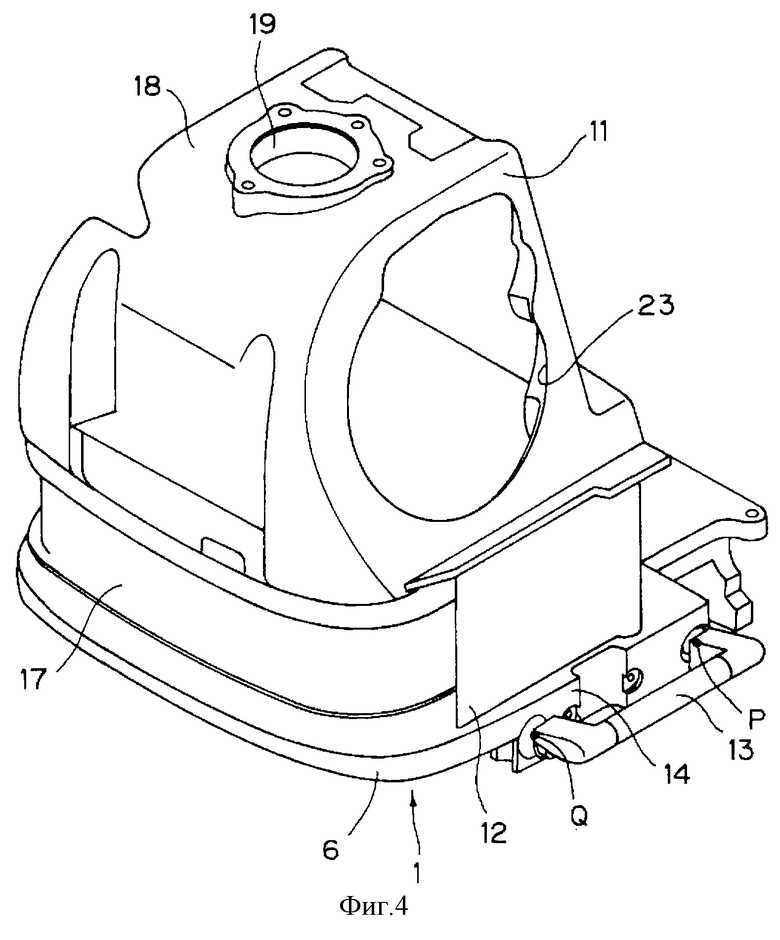
фиг.4 - верхняя часть корпуса в изометрической проекции;
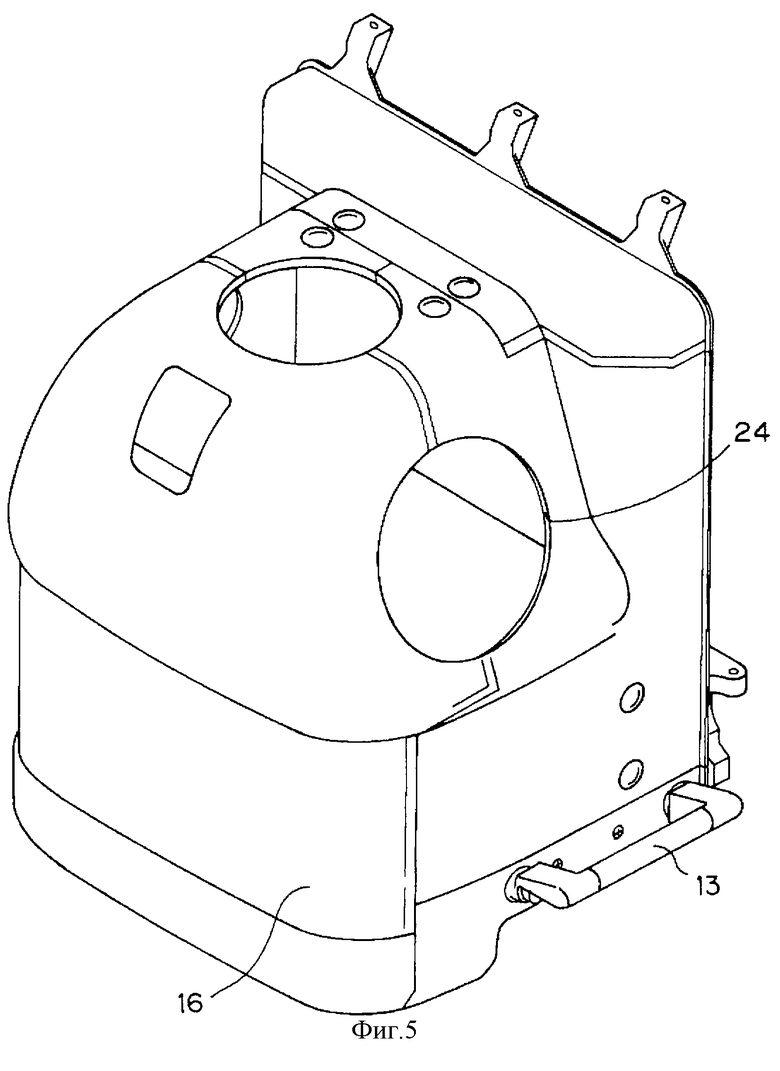
фиг.5 - верхняя часть корпуса с крышкой в изометрической проекции;
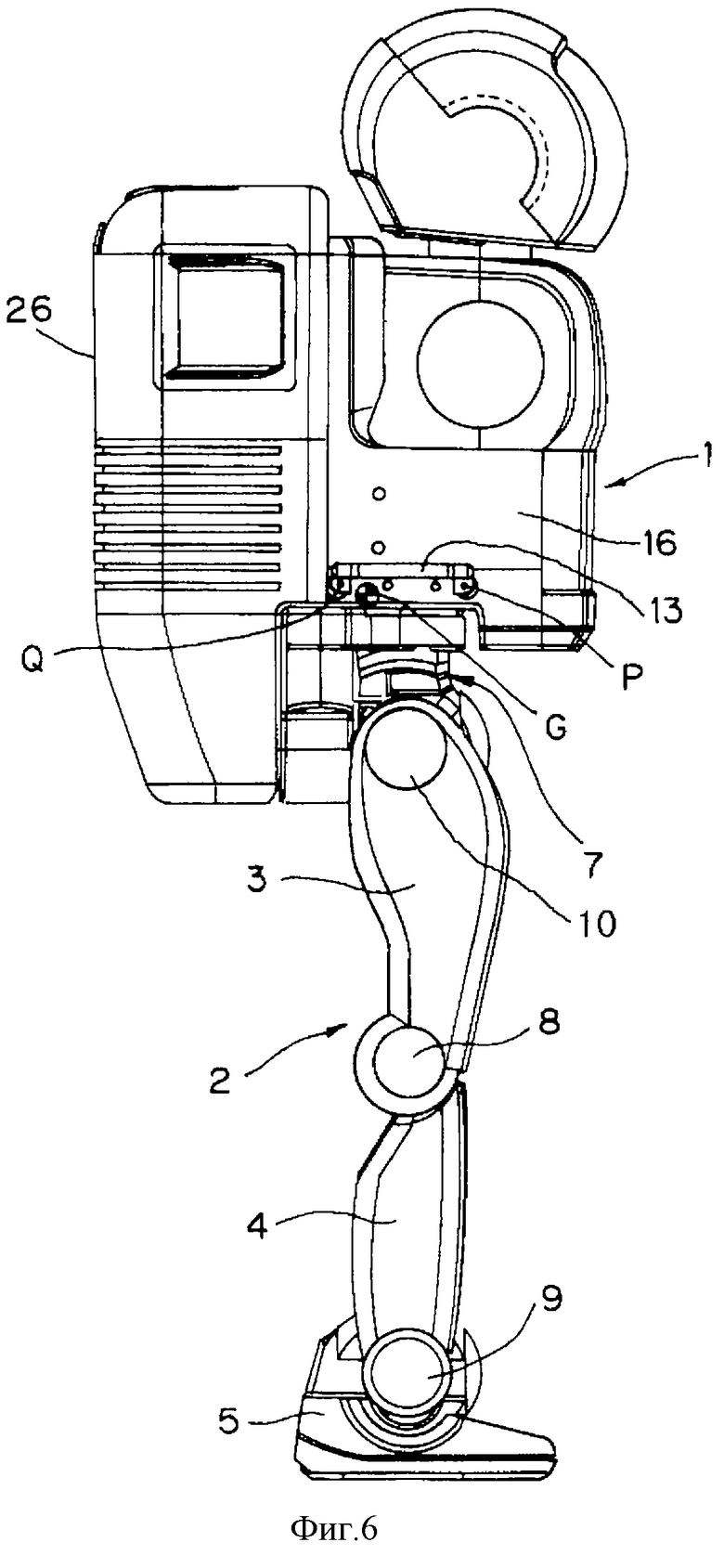
фиг.6 - двуногий локомоционный робот, показанный на фиг.2, на виде сбоку;
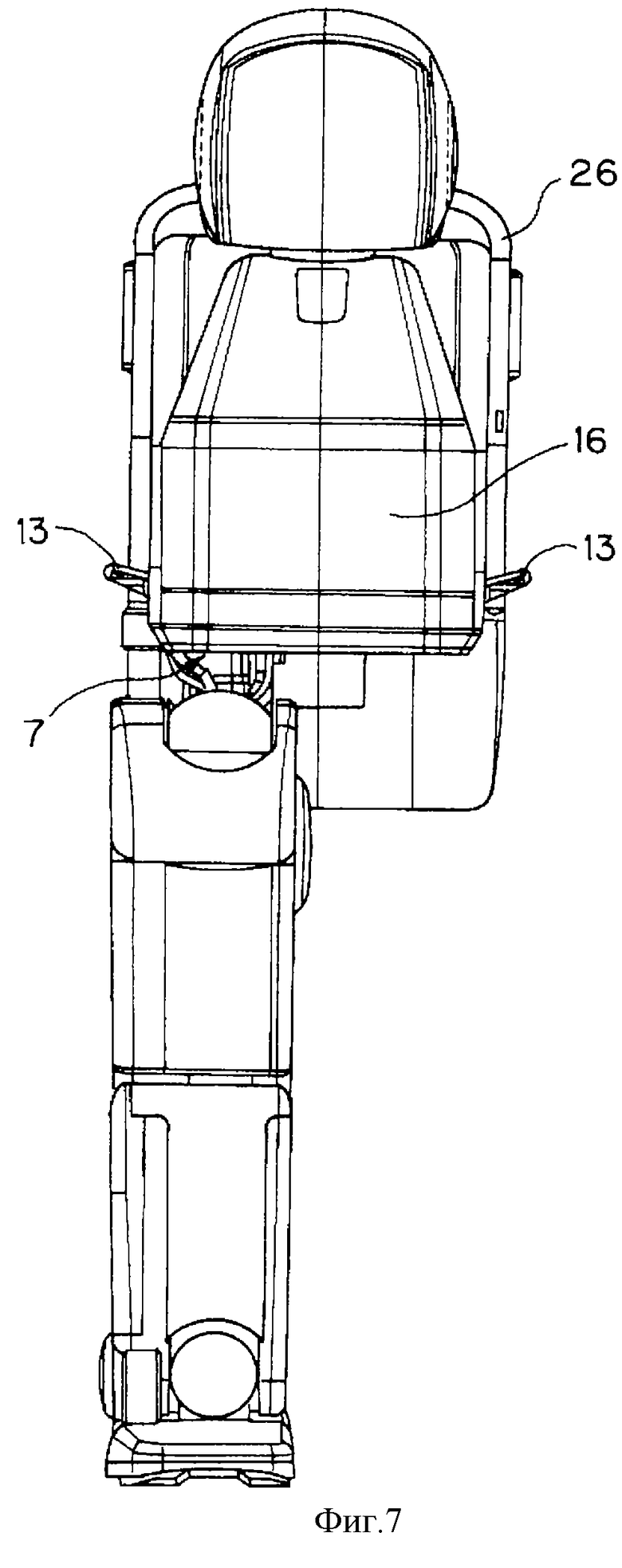
фиг.7 - часть двуногого локомоционного робота, показанного на фиг.2, на виде сбоку;
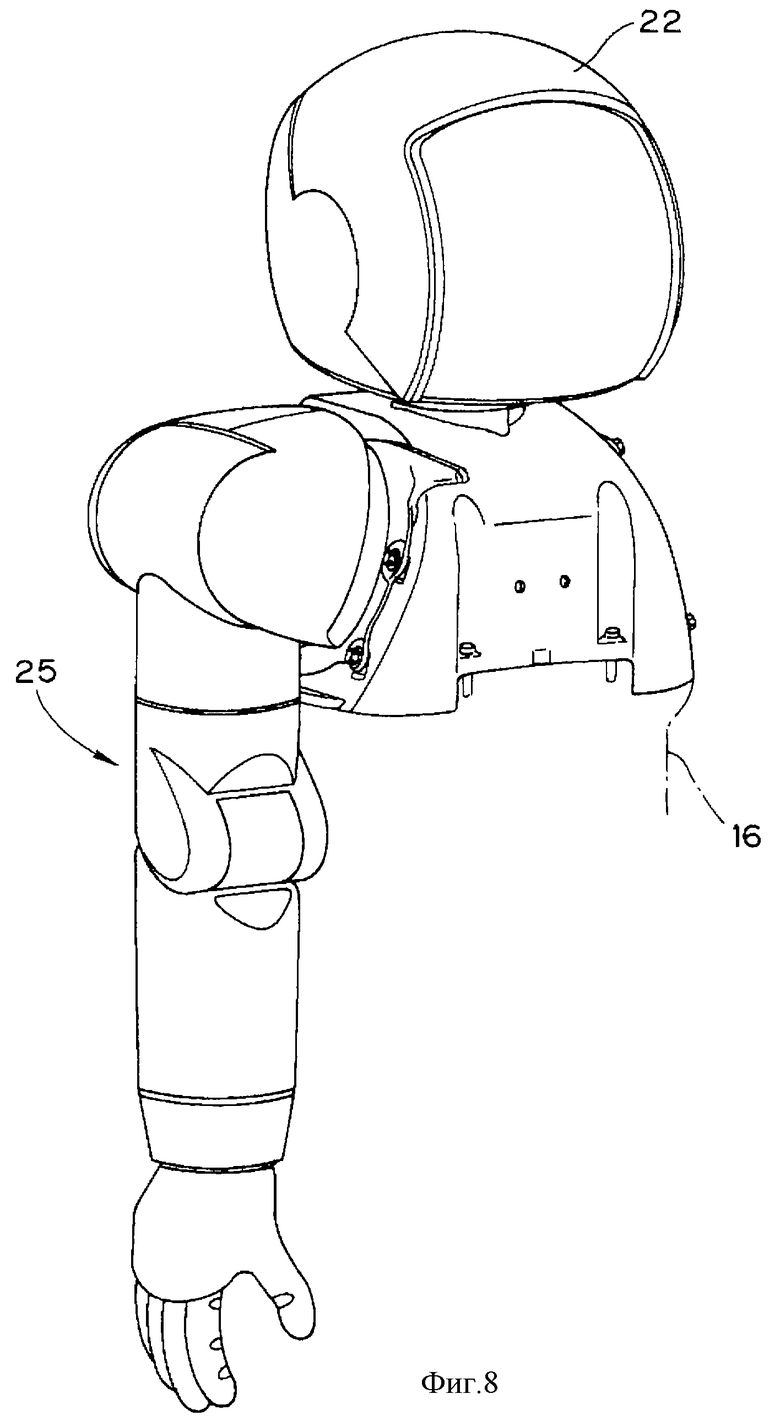
фиг.8 - рука, корпус в разрезе и голова робота в изометрической проекции;
фиг.9 - иллюстрация способа регулирования механического исходного положения в двуногом локомоционном роботе согласно одному варианту выполнения данного изобретения, на виде спереди;
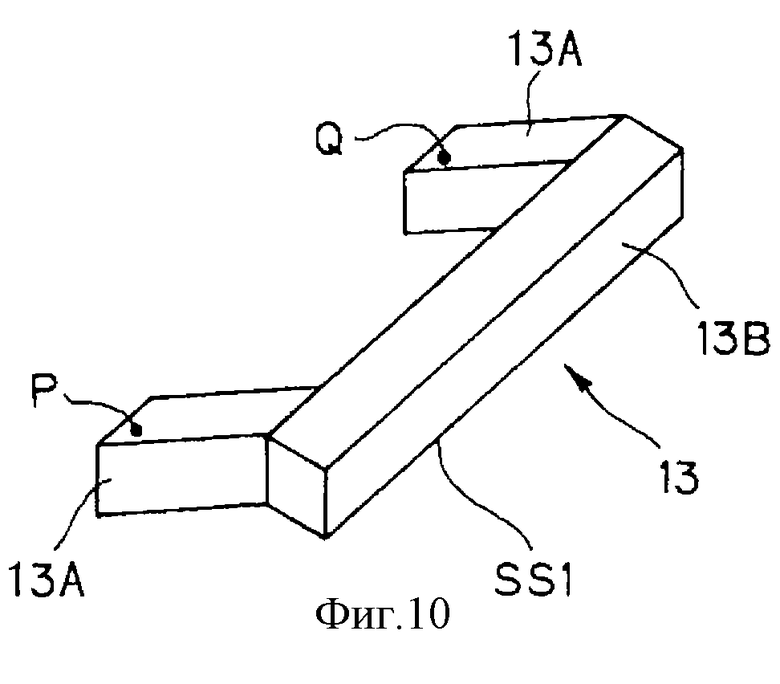
фиг.10 - рукоятка в изометрической проекции;
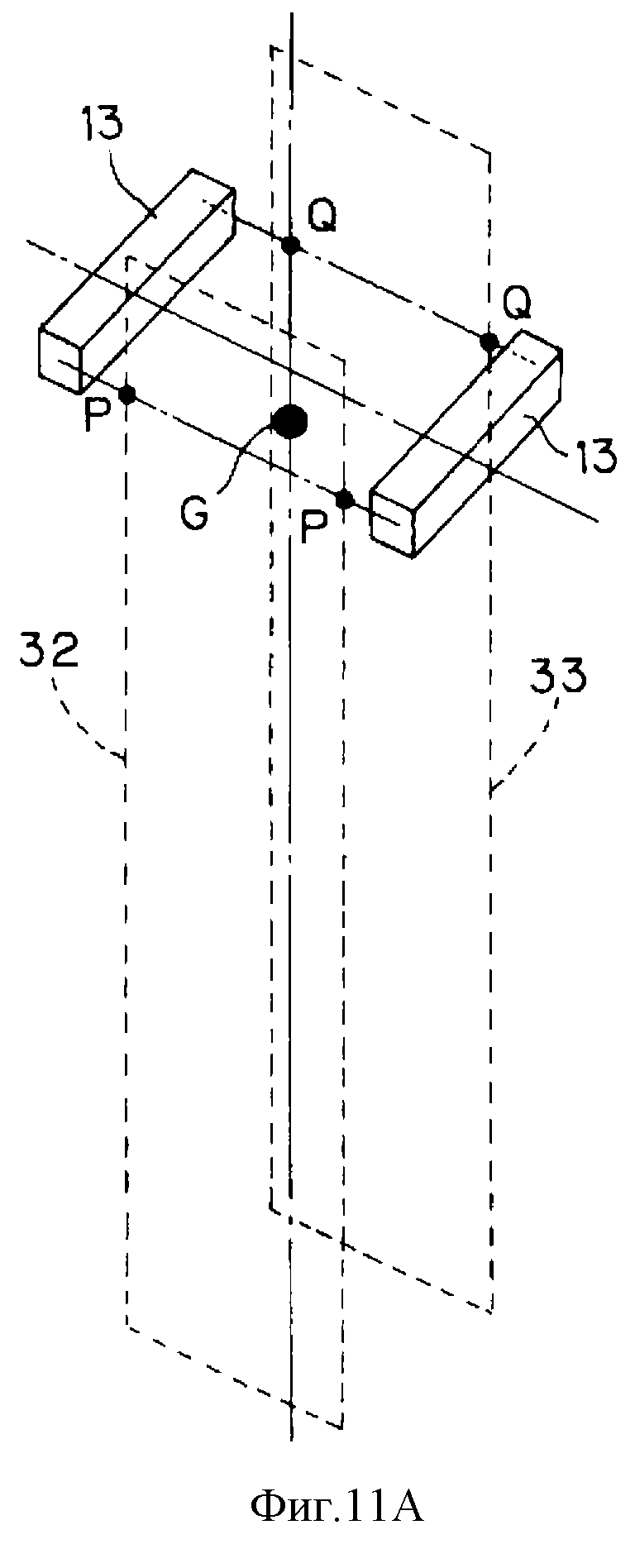
фиг.11А - иллюстрация способа регулирования механического исходного положения в двуногом локомоционном роботе согласно варианту выполнения данного изобретения, в изометрической проекции; и
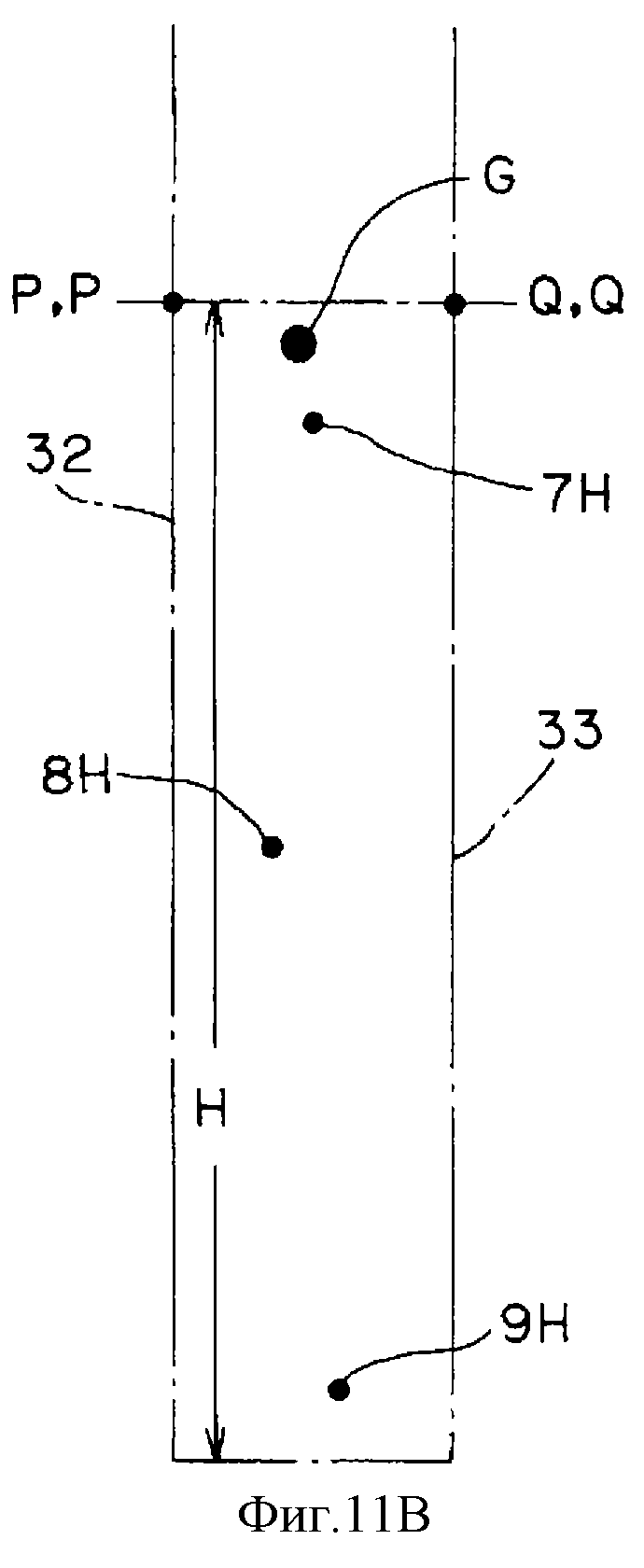
фиг.11В - схема, иллюстрирующая способ регулирования механического исходного положения;
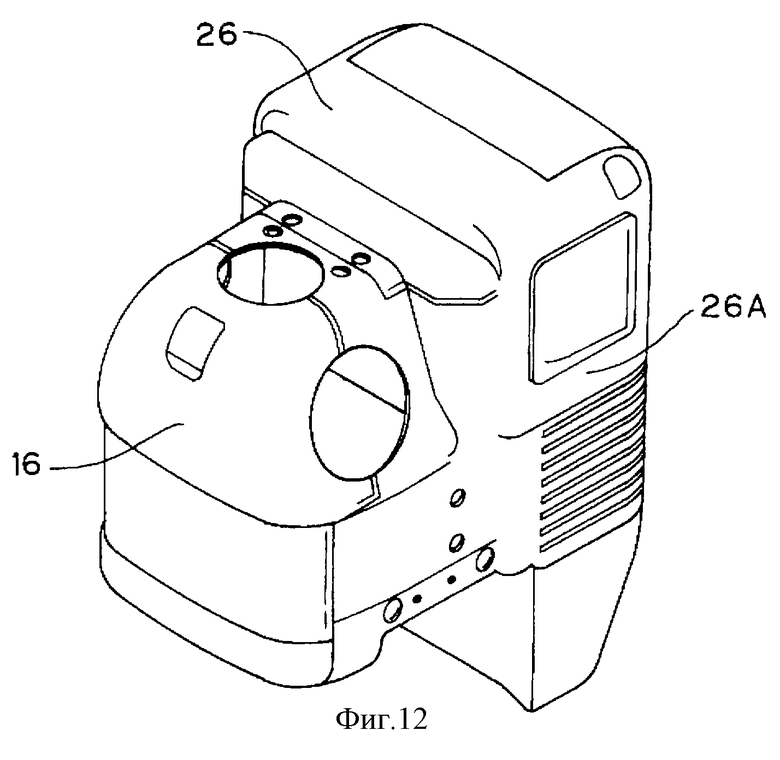
фиг.12 - часть корпуса с крышкой, в которой установлен блок электропитания, в изометрической проекции;
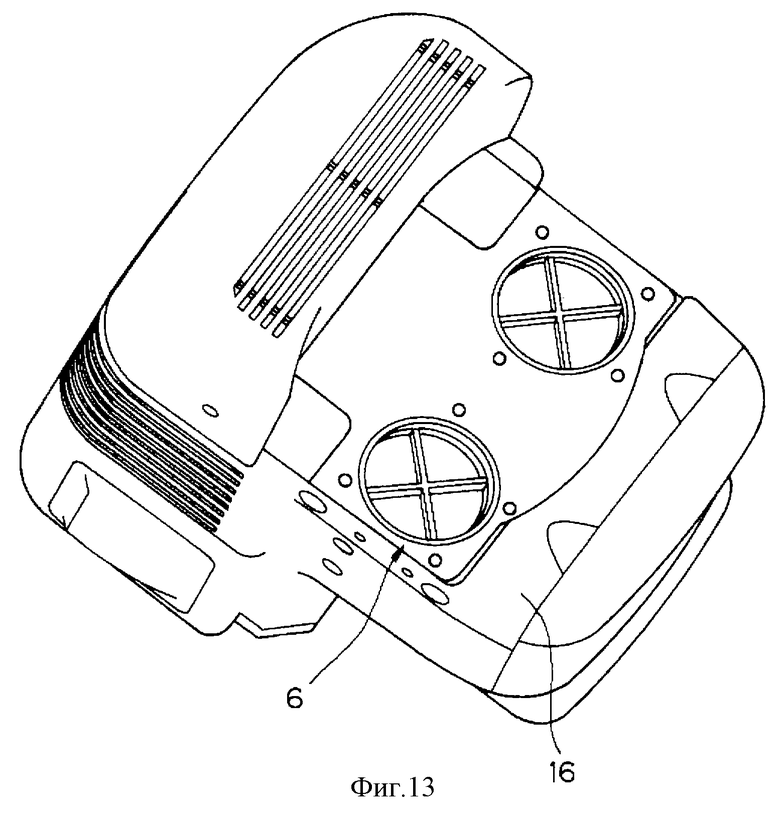
фиг.13 - корпус двуногого локомоционного робота согласно варианту выполнения данного изобретения, в изометрической проекции;
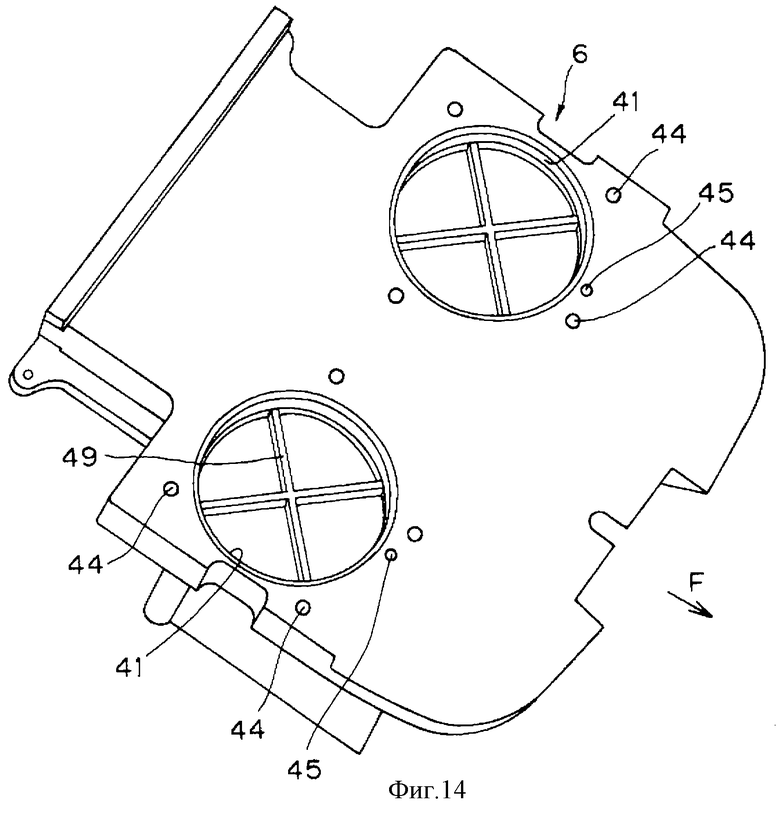
фиг.14 - опорная часть корпуса в изометрической проекции;
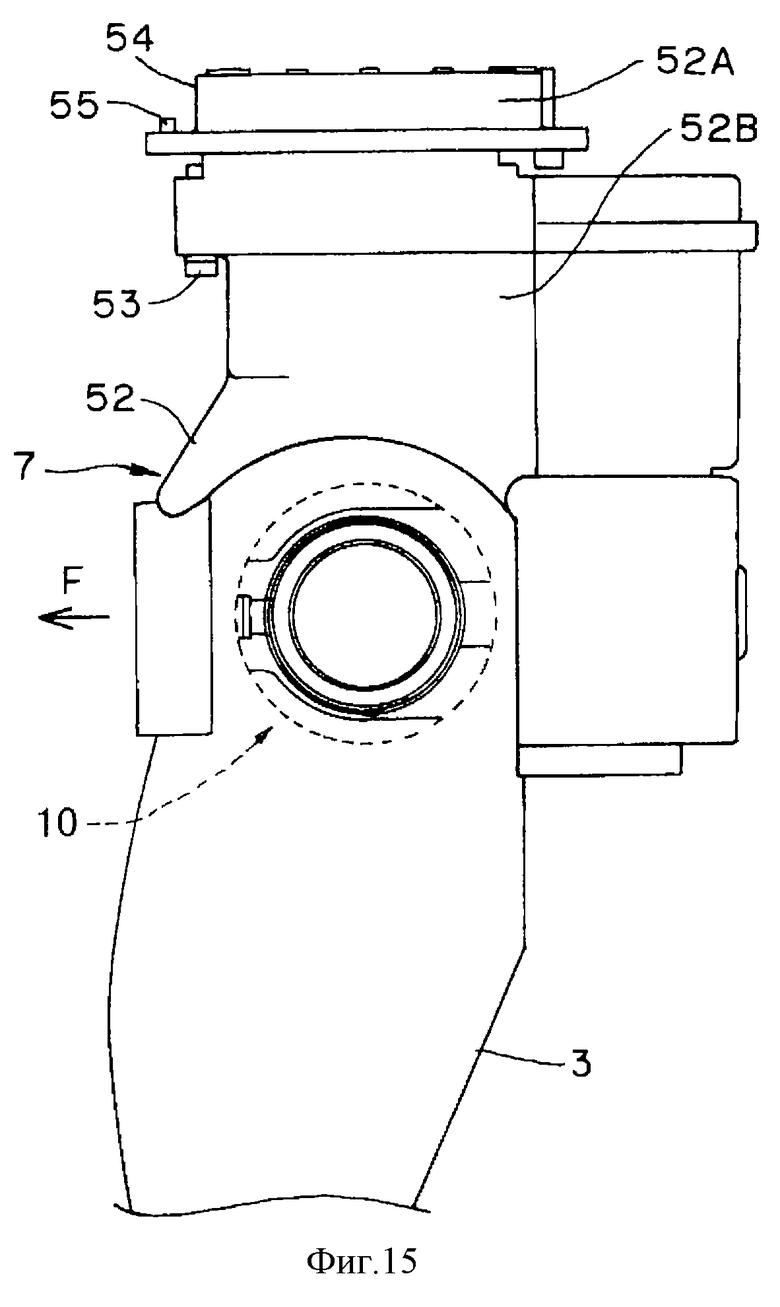
фиг.15 - нога робота, на виде сбоку, в увеличенном масштабе;
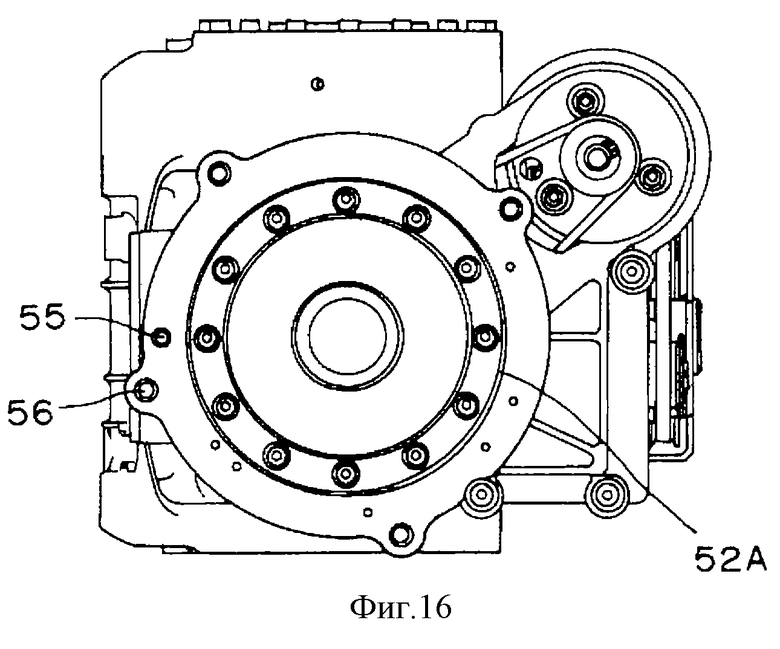
фиг.16 - опорная часть корпуса, показанная на фиг.14, на виде сверху.
Ниже приводится подробное описание двуногого локомоционного робота согласно данному изобретению со ссылками на прилагаемые чертежи.
На фиг.2 показан двуногий локомоционный робот согласно одному варианту выполнения данного изобретения. Как показано на фиг.2, двуногий локомоционный робот согласно данному изобретению содержит опорную часть 6 корпуса, корпус 1 и две ноги относительно опорной части 6 корпуса. На задней стороне корпуса 1 предусмотрен блок 26 управления. На фиг.2 показана только одна нога.
Как показано на фиг.3, опорная часть 6 корпуса является корпусом большой жесткости. Опорная часть 6 корпуса опирается с возможностью поворота вокруг двух осей на каждую из ног 2. Каждая нога 2 опирается с возможностью поворота вокруг двух осей на ступню 5. Кроме того, опорная часть 6 корпуса снабжена двумя боковыми пластинами 12 (не изображены на фиг.3) для образования зазора на обоих боковых концах опорной части 6 корпуса, как показано на фиг.4.
Каждая нога 2 имеет первую часть ноги, выполненную в виде первого звена 3, и вторую часть ноги, выполненную в виде второго звена 4. Первая часть ноги, или первое звено 3, соединена с опорной частью 6 корпуса через выполненную с возможностью поворота вокруг двух осей первую шарнирную часть 7. Вторая часть ноги, или второе звено 4, соединена с первой частью ноги через выполненную с возможностью поворота вокруг одной оси вторую шарнирную часть 8. Ступня 5 соединена со второй частью ноги через выполненную с возможностью поворота вокруг двух осей третью шарнирную часть 9. Ступня 5 частично имеет плоскую заднюю поверхность ступни, находящуюся в соприкосновении с плоским покрытием или с плоской почвой. Следует отметить, что в данном примере нога 2 и ступня 5 соединены с возможностью поворота вокруг двух осей. Однако нога 2 и ступня 5 могут быть соединены с возможностью поворота вокруг одной оси.
Таким образом, вторая часть ноги опирается на ступню 5 через третью шарнирную часть 9, а первая часть ноги опирается на вторую часть ноги через вторую шарнирную часть 8. Дополнительно к этому опорная часть 6 корпуса опирается на первые части ноги через первые шарнирные части 7.
Как показано на фиг.4, корпус 1 имеет верхнюю часть 11 корпуса. Верхняя часть 11 корпуса выполнена из легкого сплава в виде блока. Верхняя часть 11 корпуса имеет соответствующую толщину и выполнена с обеспечением высокой жесткости. Верхняя часть 11 корпуса жестко соединена с опорной частью 6 корпуса с помощью боковых пластин 12 с образованием зазора и опирается на опорную часть 6 корпуса. Верхняя часть 11 корпуса отделена от верхнего участка опорной части 6 корпуса в вертикальном направлении вверх боковыми пластинами 12. В зоне зазора между опорной частью 6 корпуса и нижним участком верхней части 11 корпуса предусмотрена возможность съема кожуха 17 для элементов аккумуляторной батареи.
Как показано на фиг.4, верхняя часть 11 корпуса имеет отверстие 19 для крепления головы в верхней части 18. Кроме того, в верхней части 11 корпуса выполнены отверстия 23 для крепления рук в боковых частях.
Две рукоятки 13 предназначены для крепления к боковым пластинам 12 на обеих сторонах опорной части 6 корпуса. А именно, две рукоятки 13 прочно прикреплены к частям 14 крепления на обеих боковых кромках опорной части 6 корпуса напротив друг друга. Каждая рукоятка 13 прикреплена к части 14 крепления в двух местах Р и Q. Предпочтительно, чтобы два соответствующих положения Р и два соответствующих положения Q находились в одной плоскости. Предпочтительно также, чтобы плоскость была параллельна горизонтальной плоскости, а именно перпендикулярна вертикальной оси. В частности, предпочтительно, чтобы два положения Р и Q были расположены в одной базовой плоскости, которая проходит через механическое исходное положение, описание которого будет приведено ниже. Как показано на фиг.3, предпочтительно, чтобы центр тяжести G полной массы готового двуногого локомоционного робота был расположен в вертикальной плоскости, которая проходит через среднюю точку между двумя положениями Р и среднюю точку между двумя положениями Q, или же вблизи вертикальной плоскости.
Как показано на фиг.5, опорная часть 6 корпуса и верхняя часть 11 корпуса закрыты крышкой 16 корпуса. На фиг.6 и 7 показан полный двуногий локомоционный робот, когда крышка 16 корпуса прикреплена к опорной части 6 корпуса. В этом случае на фиг.1 показана только одна нога 2. Рукоятка 13 расположена снаружи крышки 16 корпуса. Крышка 16 корпуса имеет отверстия, соответствующие отверстию для крепления головы и отверстия 24 для крепления рук в верхней части 11 корпуса.
Как показано на фиг.8, голова 22 крепится к верхней части 11 корпуса так, что голова 22 установлена по оси отверстия 19 для крепления головы верхней части 11 корпуса через крышку 16 корпуса и поддерживается в вертикальном направлении. Аналогично голове 22 руки 25 установлены по оси отверстий 24 для крепления рук верхней части 11 корпуса через крышку 16 корпуса и прикреплены к верхней части 11 корпуса с возможностью поворота вокруг двух осей. То есть, как показано на фиг.8, рука 25 имеет степени свободы по нескольким осям и прикреплена к верхней части 11 корпуса с возможностью свободного качания и поворота. Блок 26 управления переносного типа расположен на задней стороне крышки 16 корпуса и прикреплен к опорной части 6 корпуса, как показано на фиг.2.
На фиг.9 показан способ регулирования механического исходного положения. Система элементов состоит из системы S1 опорной части корпуса, систем S2 первых звеньев, систем S3 вторых звеньев и систем S4 ступней. На фигуре показано состояние, в котором выполняется проверка ходьбы, при этом система рук не показана. Система S2 первого звена, система S3 второго звена и система S4 ступни предусмотрены для каждой стороны, однако рассматриваются как единая система.
Как показано на фиг.10, рукоятка 13 имеет единый корпус из поперечных стержней 13А, проходящих в поперечном направлении, и перемычки 13В, проходящей в переднем направлении. Поверхность перемычки 13В, в частности нижняя поверхность перемычки 13В, выполнена в качестве базовой поверхности SS1 для механического исходного положения. Базовая поверхность SS2, соответствующая базовой поверхности SS1 для механического исходного положения на обеих сторонах, выполнена в виде верхней поверхности жесткой стойки 31 корпуса, которая стоит на базовой горизонтальной поверхности SS3 пола. Совпадение базовой поверхности SS1 для механического исходного положения и базовой поверхности SS2 можно обнаруживать с помощью тактильного датчика (не изображен), который обнаруживает соприкосновение жесткой стойки 31 корпуса и рукоятки 13.
Двуногий локомоционный робот имеет вес, сравнимый с весом человека, и переносится с использованием рукояток 13 на обеих сторонах, так чтобы базовая поверхность SS1 для механического исходного положения совпадала с базовой поверхностью SS2 двух жестких стоек 31. Или же двуногий локомоционный робот приводится в действие с помощью дистанционного радиоуправления так, чтобы базовая поверхность SS1 для механического исходного положения совпадала с базовой поверхностью SS2 двух жестких стоек. После этого инициализируют три системы S2, S3 и S4 координат с использованием системы S1 координат в качестве базовой. То есть, в исходном состоянии система элементов возвращена в исходные состояния всех координатных систем S1, S2, S3 и S4.
На фиг.11А и 11В показан допустимый диапазон механического исходного положения. Пространство, образованное между вертикальной плоскостью 32, содержащей обе точки Р и Р рукоятки 13 на обеих сторонах, и вертикальная плоскость 33, содержащая обе точки Q и Q рукоятки 13 на обеих сторонах, определяется в качестве допустимого диапазона. Целью управления является расположение между двумя вертикальными плоскостями 32 и 33 горизонтальной оси 10 вращения, проходящей в горизонтальном направлении в первой шарнирной части 7, горизонтальной оси 8Н вращения, проходящей в горизонтальном направлении во второй шарнирной части 8, и горизонтальной оси 9Н вращения, проходящей в горизонтальном направлении в третьей шарнирной части. Нет необходимости в том, чтобы горизонтальные оси 7Н, 8Н и 9Н вращения находились в одной вертикальной плоскости. Наоборот, положение горизонтальных осей 7Н, 8Н и 9Н вращения не в одной вертикальной плоскости приводит к отличной устойчивости. Все распределение масс в роботе предусмотрено так, чтобы центр тяжести G всего двуногого локомоционного робота находился в допустимом диапазоне, когда горизонтальные оси 7Н, 8Н и 9Н вращения находятся в этом допустимом диапазоне. Поверхность постановки стопы 5 находится в этом допустимом диапазоне. Положение вращения серводвигателя или секции привода вращения, соответствующей каждой шарнирной части, устанавливают и инициализируют, когда завершена юстировка центра тяжести.
Следует отметить, что в этом примере рукоятки 13 прикреплены к боковым частям 14 опорной части 6 корпуса. Однако рукоятки 13 могут быть предусмотрены в виде выступов (не изображены). Кроме того, не обязательно, чтобы рукоятки 13 были в одной и той же горизонтальной плоскости. Если положение центра тяжести находится на слегка наклонной плоскости, проходящей через рукоятки 13, то можно легко стабилизировать позу робота. Регулирование исходного положения возможно также самим роботом за счет использования рукояток и базовой поверхности.
Управление ходьбой имеет различные параметры. Было установлено, что ударная релаксация, подходящая жесткость и оптимальные массы движения корпуса являются важными физическими факторами для управления ходьбой. В двуногом локомоционном роботе согласно данному изобретению установлены следующие соотношения.
(1) Жесткость опорной части 6 корпуса или жесткость опорной части 6 корпуса и жесткость объекта, соединенного с опорной частью 6 корпуса, больше жесткости первой части ноги, которая больше жесткости второй части ноги.
(2) Полная масса всех объектов, составляющих массу опорной части 6 корпуса, больше массы первой части ноги, которая больше массы второй части ноги.
(3) условие (1) + условие (2).
Жесткости можно определять на основе жесткости при изгибе или жесткости при кручении, когда оба конца каждого объекта находятся на опоре, а нагрузка или давление приложены к заданному месту или зоне. Важно, чтобы жесткость объекта, соединенного с опорной частью 6 корпуса и расположенного на некотором расстоянии вниз от опорной части 6 корпуса, была ниже, а его масса меньше. Условия (1), (2) и/или (3) облегчают анализ зависимости от переменных и зависимость от параметров при управлении направлением. Например, когда масса ступни больше, то движение ступни 5 оказывает большое воздействие на управление всей системой. Таким образом, трудно определить, зависит ли движение всей системы от действия серводвигателя или от центробежного движения ступни с большой инерцией (инертной массой). Однако, если масса ступни 5 установлена небольшой, то можно определить, что движение всей системы зависит в основном от серводвигателя. Это сильно зависит, в частности, от жесткости каждой системы. Первое и второе звенья правильно снабжать высокой жесткостью, при этом их жесткость выбирается меньше, чем жесткость опорной части корпуса.
Когда части крепления рукоятки расположены относительно центра тяжести вблизи горизонтальной зоны, содержащей рукоятки 13, то устойчивость является хорошей, когда весь робот переносится с использованием рукояток 13. В частности, когда робот установлен на жесткую стойку с использованием рукояток 13, то легко регулировать положения ступней 5 относительно рукояток 13, так чтобы поверхности постановки ступней 5 были параллельны базовой плоскости рукояток 13.
В случае, когда руки 25 и голова 22 прикреплены с возможностью свободного качания относительно опорной части 6 корпуса с наибольшей жесткостью или относительно верхней части 11 корпуса, имеющей высокую жесткость и соединенной с опорной частью 6 корпуса робота, то достигается небольшая масса всей системы. Батарея элементов вставляется между опорной частью 6 корпуса и верхней частью 11 корпуса, что обеспечивает улучшение эффективности использования пространства при сохранении жесткости.
На фиг.12 показана крышка 16 корпуса и блок 26 управления переносного типа. На фиг.13 показана разделенная опорная часть 6 корпуса, когда верхняя часть 26А переносного блока 26 управления удалена, а часть крышки 16 корпуса открыта. На фиг.14 показана вся опорная часть 6 корпуса в изометрической проекции. На фиг.14 стрелкой F обозначено переднее направление. Опорная часть 6 корпуса образована в виде отлитого из легкого сплава блока, имеющего высокую жесткость и соответствующую толщину в вертикальном направлении. Два установочных отверстия 41, соответствующие двум ногам, выполнены в опорной части корпуса. Для позиционирования каждой ноги образовано установочное отверстие 45 под штифт. Две ноги прочно соединены с опорной частью 6 корпуса с помощью болтов, проходящих через болтовые отверстия 44, которые образованы в опорной части 6 корпуса. В каждом из двух установочных отверстий 41 образовано усиливающее крестообразное ребро 49.
На фиг.15 и 16 показана структурная часть 52 первой шарнирной части 7. Структурная часть 52 первой шарнирной части 7 имеет крепежную часть 52А и поворотную часть 52В. Верхний участок крепежной части 52А структурной части 52 имеет наружную круглую цилиндрическую поверхность 54. Круглая цилиндрическая поверхность 54 входит соосно в установочное отверстие 41, показанное на фиг.14. При креплении первой шарнирной части 7 установочный штифт 55, который установлен сверху на поверхности крепежной части 52А, вставлен в установочное отверстие 45 под штифт, показанное на фиг.14, для определения соотношения положений структурной части 52 и опорной части 6 корпуса. Структурная часть 52 и опорная часть 6 корпуса прочно соединены для большей жесткости с помощью болтов (не изображены), проходящих через болтовое отверстие 56 на стороне структурной части 52 и болтовые отверстия 44 на стороне опорной части 6 корпуса.
Ступня 5 предусмотрена вдали от центра тяжести G и управляется с возможностью нескольких степеней свободы через первую часть ноги и вторую часть ноги. Поэтому управление движением ступни 5 при поднимании ступни и движения постановки ступни более точно выполняется относительно базовой системы координат, которая фиксирована на опорной части 6 корпуса, по сравнению со случаем, когда первая часть ноги и вторая часть ноги имеют более высокую жесткость, чем опорная часть 6 корпуса. Таким образом, первая шарнирная часть 7 выполнена с возможностью поворота относительно опорной части 6 корпуса вокруг одной оси или двух осей.
В двуногом локомоционном роботе согласно данному изобретению легко регулируется механическое исходное положение с высокой точностью. В частности, жесткость является более низкой в части, более удаленной от механического исходного положения. Поэтому можно легко смягчать удар постановки в части, более удаленной от механического исходного положения. Управление моментов вращения в подвешенном состоянии ступни становится простым, поскольку меньше жесткость, и часть, расположенная дальше от механического исходного положения, имеет меньшую массу. В результате, инициализация управления постановки стопы становится простой. Рукоятки предусмотрены в положениях вблизи центра тяжести так, что устойчивость является хорошей. Когда двуногий локомоционный робот находится в стационарном состоянии за счет фиксации механического исходного положения с использованием рукояток, то выполняют инициализацию системы робота. Поэтому работа по инициализации является простой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| УНИВЕРСАЛЬНЫЙ СПОРТИВНЫЙ ТРЕНАЖЕР (ВАРИАНТЫ) | 2005 |
|
RU2293584C1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| ЛОКОМОЦИОННАЯ СИСТЕМА И УСТРОЙСТВО | 2013 |
|
RU2643667C2 |
| ЛОКОМОЦИОННАЯ СИСТЕМА ДЛЯ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ОБОЛОЧКА ДЛЯ СТУПНИ ДЛЯ ИСПОЛЬЗОВАНИЯ С ТАКОЙ СИСТЕМОЙ | 2013 |
|
RU2769529C2 |
| ЛОЖА ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 2003 |
|
RU2341754C2 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| Тренажер "Тележка вертикальная" и способ тренировки с его помощью | 2020 |
|
RU2742977C1 |
| УСТРОЙСТВО ГОРИЗОНТИРОВАНИЯ | 2023 |
|
RU2806130C1 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |


Изобретение относится к двуногому локомоционному роботу. Робот содержит опорную часть корпуса, две ноги, каждая из которых содержит первое звено для опоры опорной части через первую шарнирную часть, и второе звено для опоры первого звена через вторую шарнирную часть, а также ступни, подвижно соединенные с каждой ногой через третью шарнирную часть. Жесткость первого звена ниже жесткости опорной части корпуса, а жесткость второго звена ниже жесткости первого звена. Опорная часть корпуса дополнительно содержит две противоположно расположенные рукоятки. Центр тяжести робота расположен вблизи плоскости, проходящей через части крепления рукояток, между вертикальными плоскостями, каждая из которых проходит через соответствующие концы частей крепления указанных двух рукояток к опорной части корпуса, при этом двуногий локомоционный робот находится в механическом исходном положении. Изобретение позволит регулировать исходное положение с высокой точностью, обеспечить хорошую устойчивость робота. 3 з.п. ф-лы, 16 ил.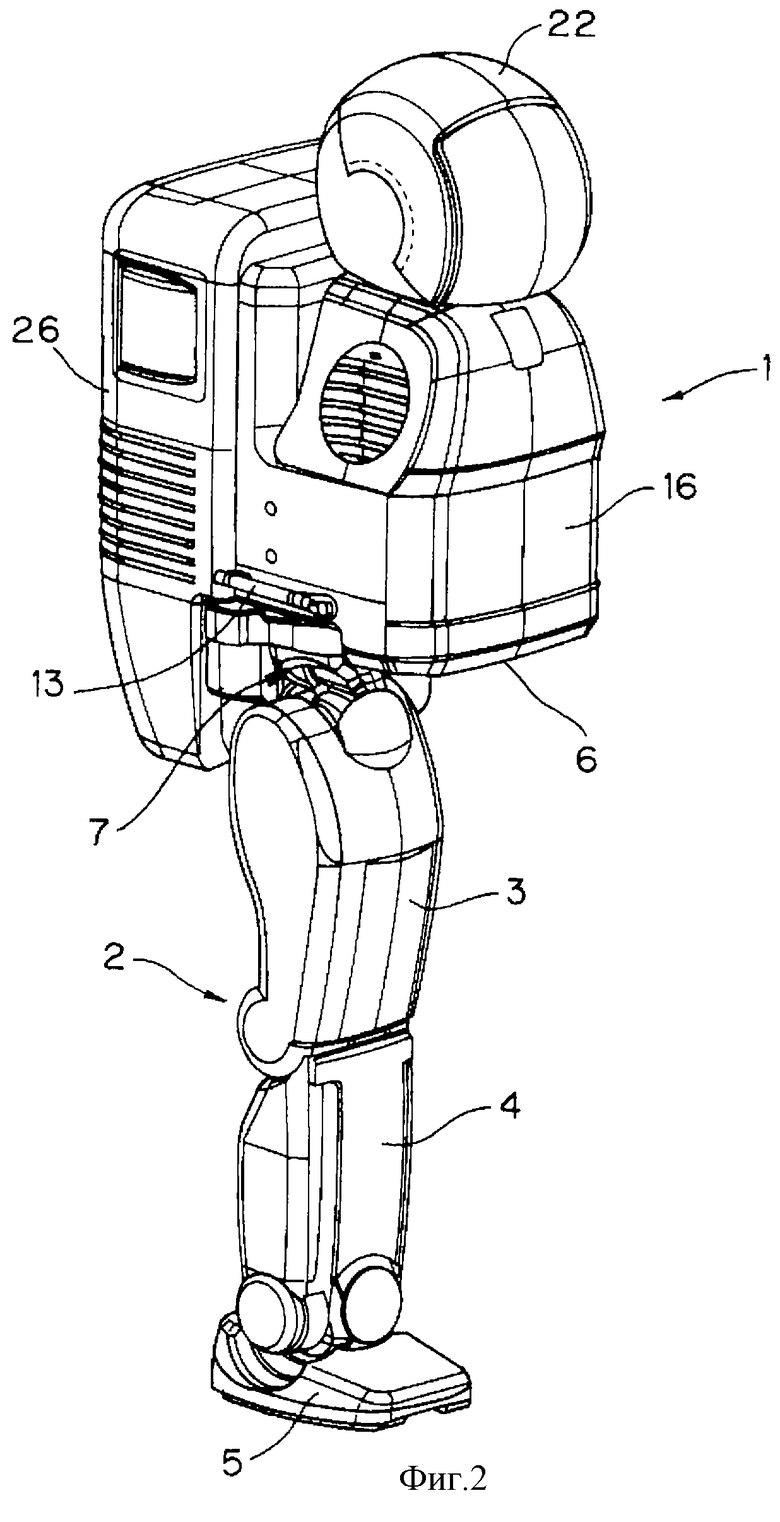
| US 6064167 А, 16.05.2000 | |||
| Устройство для нанесения полимерных покрытий на изделия | 1975 |
|
SU573203A1 |
| ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2043915C1 |

