4i
СД О
Ф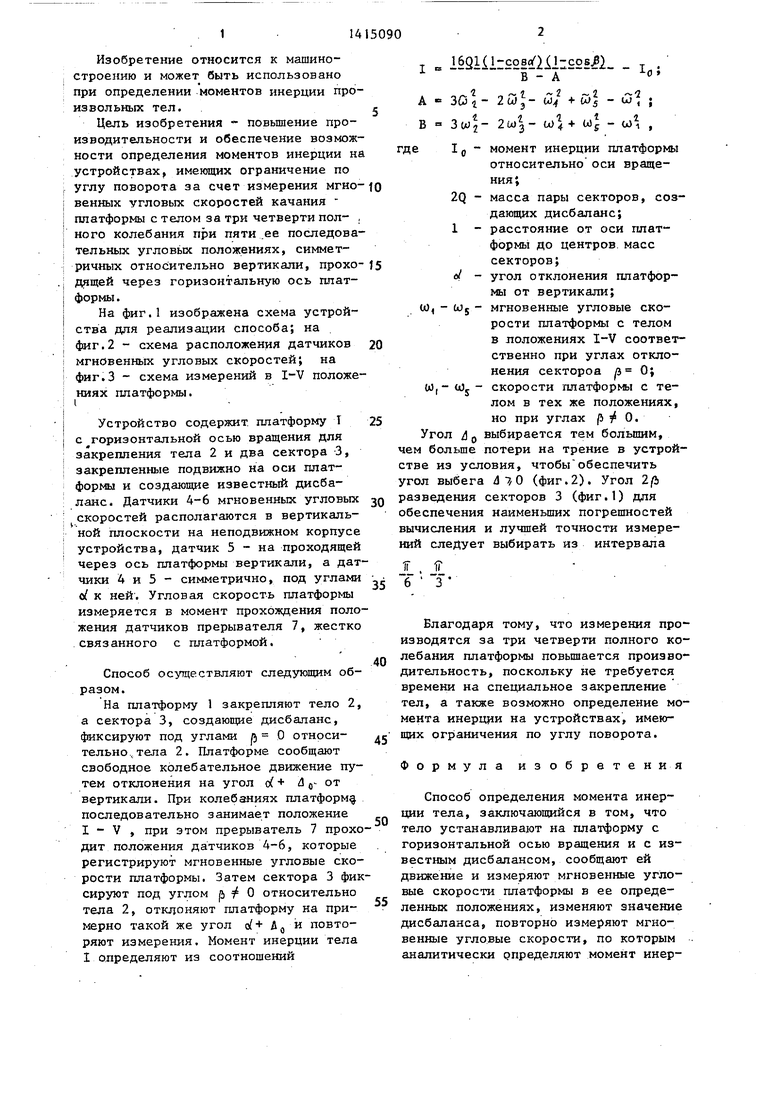
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения момента инерции тела | 1983 |
|
SU1100505A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2115904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200940C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2112227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436055C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2014 |
|
RU2575184C1 |
| Способ идентификации присоединенного момента инерции тела и устройство для его осуществления | 2016 |
|
RU2627023C1 |
Изобретение относится к машиностроению и может быть использовано для определения моментов инерции тел, Целью изобретения является повышение производительности и обеспечение возможности определения момента инерции на устройствах, имеющих качающуюся на горизонтальной оси платформу с известным дисбалансом и ограничением по углу поворота. Суть заключается в том, что платформе 7 с закрепленным на ней телом сообщают угловые колебания и измеряют ее мгновенные угловые скорости датчиками 4,5 и 6 в пяти ее последовательных угловых положениях I-V, изменяют значение дисбаланса, повторяют измерения мгновенных угловых скоростей в тех же положениях платформы и аналитически опре- момент инерции. 3 ил. (Л
Изобретение относится к машино- строению и может быть использовано при определении моментов инерции произвольных тел.
Цель изобретения - повьшение производительности и обеспечение возможности определения моментов инерции на устройствах, имеющих ограничение по углу поворота за счет измерения мгновенных угловых скоростей качания платформы с телом за три четверти пол- , ного колебания при пяти .ее последовательных угловьк положениях, симметричных относительно вертикали, прохо- fSfiwiRA через горизонтальную ось платформы .
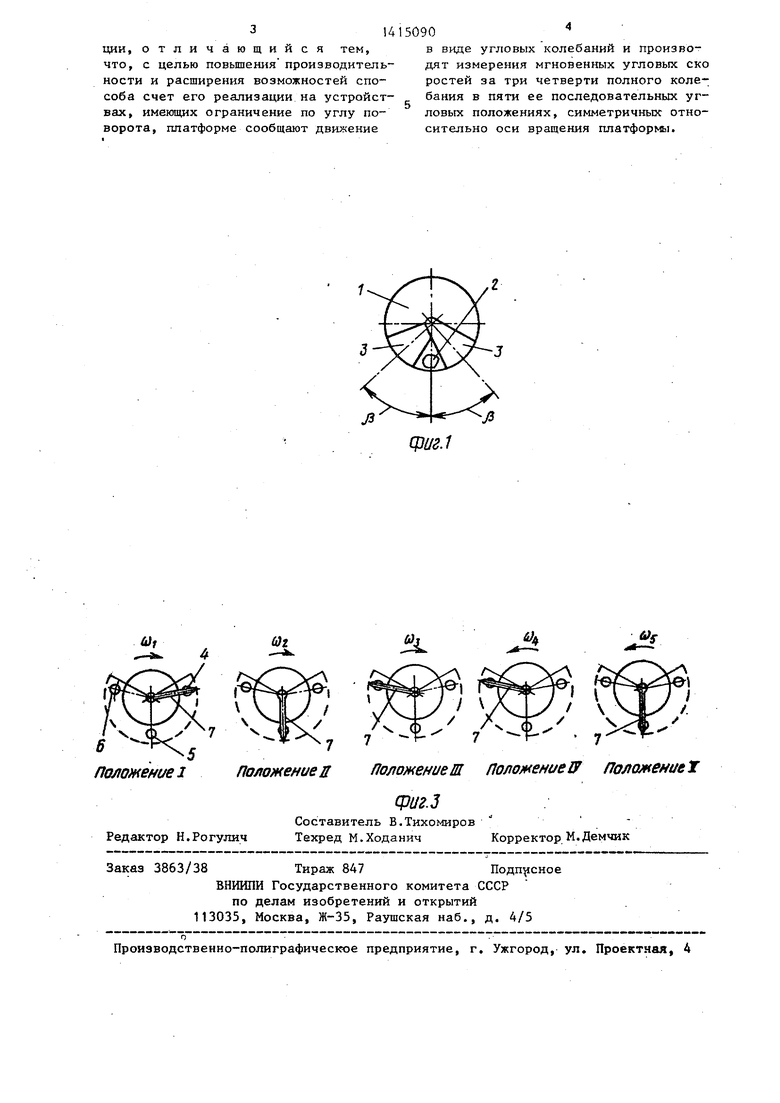
На фиг.1 изображена схема устройства для реализации способа; на фиг.2 - схема расположения датчиков мгновенных угловых скоростей; на фиг.З - схема измерений в I-V положениях платформы.
Устройство содержит, платформу Т с горизонтальной осью вращения для закрепления тела 2 и два сектора 3, закрепленные подвижно на оси платформы и создающие известный дисбаланс. Датчики 4-6 мгновенных угловых скоростей располагаются в вертикальной плоскости на неподвижном корпусе устройства, датчик 5 - на проходящей через ось платформы вертикали, а датчики 4 и 5 - симметрично, под углами 0 к ней. Угловая скорость платформы измеряется в момент прохождения положения датчиков прерывателя 7, жестко связанного с платформой.
Способ осуществляют следующим образом.
На платформу 1 закрепляют тело 2, а сектора 3, создающие дисбаланс, фиксируют под углами и О относительно,, тела 2. Платформе сообщают свободное колебательное движение путем отклонения на угол о( + Л от вертикали. При колебаниях платформу последовательно занимает положение I - V , при этом прерыватель 7 проходит положения датчиков 4-6, которые регистрируют мгновенные угловые скорости платформы. Затем сектора 3 фиксируют под углом (Ь О относительно тела 2, отклоняют платформу на примерно такой же угол Дд и повторяют измерения. Момент инерции тела I определяют из соотношений
т . l§9iii: 2B« llIl 2e l. т .
-
0
5
0
5
0
5
0
5
0
5
А В
30 1- 2сЗз- W/ + W5 - wl
3W7 2w|- 004+ Wf - Ы ,
2-
где I о - момент инерции платформы относительно оси вращения ;
2Q - масса пары секторов, создающих дисбаланс; 1 - расстояние от оси платформы до центров, масс секторов;
в/ - угол отклонения платформы от вертикали;
ю, - Wj - мгновенные угловые скорости платформы с телом в положениях I-V соответственно при углах отклонения секторов д 0; W,-u)j- скорости платформы с телом в тех же положениях, но при углах /5 7 0. Угол Л о выбирается тем большим, чем больше потери на трение в устройстве из условия, чтобы обеспечить угол выбега J О (фиг.2). Угол 2ft разведения секторов 3 (фиг.1) для обеспечения наименьших погрешностей вычисления и лучшей точности измерений следует выбирать из интервала
f . tr
Т Т
Благодаря тому, что измерения производятся за три четверти полного колебания платформы повышается производительность, поскольку не требуется времени на специальное закрештение тел, а также возможно определение момента инерции на устройствах, имеющих ограничения по углу поворота.
Формула изобретения
Способ определения момента инерции тела, заключающийся в том, что тело устанавливают на платформу с горизонтальной осью вращения и с известным дисбалансом, сообщают ей движение и измеряют мгновенные угловые скорости платформы в ее определенных положениях, изменяют значение дисбаланса, повторно измеряют мгновенные угловые скорости, по которым . аналитически рпределяют момент инерции, отличающийся тем, что, с целью повышения производительности и расширения возможностей способа счет его реализации на устройствах, имеющих ограничение по углу поворота, платформе сообщают движение
Иг
;
Полон ёние noflO)t eHueS Положение Ш Лоло ен1/е17 Пол(М енаб1
Редактор Н.Рогулич Заказ 3863/38
Ф//гJ
Составитель В.Тихомиров
Техред М.Ходанич Корректор М.Демчик
Тираж 847Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
1415090
в виде угловых колебаний и производят измерения мгновенных угловых ско ростей за три четверти полного колебания в пяти ее последовательных угловых положениях, симметричных относительно оси вращения платформы.
сриг.1
I.
| Устройство для определения тензора инерции | 1980 |
|
SU922561A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения целлюлозы из стеблей хлопчатника | 1912 |
|
SU505A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
