Предлагаемое изобретение относится к подъемно-перегрузочному оборудованию, а более конкретно, к такелажной оснастке, используемой при перегрузке, сборке, кантовании космических аппаратов и их стыковке с адаптером или ракетой-носителем.
Известно чалочное приспособление ЭР 140-14.0-30, содержащее установленные на серьге стропы с закрепленными на них такелажными узлами крепления космического аппарата (см. Изделие 17Ф118. Инструкция по сборке (разборке). 17Ф118. ИЭ14, КБ "Полет", 1985 г., лист 29).
Известна также траверса 153.9521-000, содержащая несущую балку с установленной на ней серьгой, состоящей из проушины и хвостовика, шарнирно связанного с несущей балкой, а также с закрепленными в балансировочных гнездах несущей балки стропами с установленными на них такелажными узлами крепления космического аппарата (см. Блок КА 17С18 К. Инструкция по стыковке (расстыковке). 17С18К. ИЭ15, КБ "Полет", 2002 г., лист 44). Шарнирное крепление серьги на несущей балке необходимо для удобства накидывания серьги на крюк крана. Для подъема и переноса космического аппарата стропы устанавливают в те балансировочные гнезда, которые максимально приближают центр масс космического аппарата к вертикали подвеса траверсы к крюку крана. Поскольку переустановка строп в балансировочных гнездах приводит к дискретному перемещению центра масс космического аппарата относительно вертикали подвеса, то положение центра масс космического аппарата может не совпадать с вертикалью подвеса. В этом случае при подъеме космического аппарата момент от смещенного от вертикали подвеса центра масс космического аппарата перемещает центр масс космического аппарата к вертикали подвеса, перекашивая (наклоняя) траверсу и, соответственно, космический аппарат относительно горизонта.
Недостатком данной траверсы является невозможность точной регулировки углового положения поднимаемого (перегружаемого) космического аппарата.
На практике при проведении подъемно-перегрузочных и стыковочно-установочных операций с космическими аппаратами обязательным условием является непревышение допустимого угла наклона (перекоса) вертикальной или горизонтальной осей (перегружаемых или стыкуемых) космических аппаратов, подвешенных на крюке крана с помощью траверсы, составляющего величину порядка 1-2°. Данное ограничение диктуется особенностями конструкций стыковочных узлов космических аппаратов, адаптеров и ракет-носителей. При угле (наклона) перекоса космического аппарата, превышающем допустимый угол, стыковка космических аппаратов либо невозможна, либо может привести к повреждению стыковочных элементов, возникновению в стыковочных узлах нерасчетных нагрузок и возможности нештатного отделения космического аппарата от адаптера или ракеты-носителя.
Обычно балансировочные гнезда на несущей балке выполняются с определенным шагом (порядка 100 мм). Поэтому при переустановке стропы в соседнее балансировочное гнездо несущей балки удается добиться смещения центра масс поднимаемой системы (траверса - космический аппарат) не более чем на 0,25 шага (порядка 25 мм). Наличие такого не устраняемого перестановкой строп допуска на отклонение центра масс поднимаемой системы в ряде случаев приводит к превышению допускаемого угла наклона (перекоса) вертикальной или горизонтальной осей (перегружаемых или стыкуемых) космических аппаратов.
Задачей (целью) предлагаемого изобретения является обеспечение допустимого угла наклона (перекоса) перегружаемого (стыкуемого) космического аппарата.
Поставленная задача (цель) достигается тем, что на несущей балке устанавливается стопор с возможностью его взаимодействия с фиксирующим гнездом, выполняемым на хвостовике ниже шарнира, связывающего хвостовик с несущей балкой. Серьгу предложено снабжать регулируемой винтовой вставкой, закрепленной между проушиной серьги и ее хвостовиком и снабженной фиксатором.
Жесткое крепление серьги относительно несущей балки при подъеме космического аппарата и регулировка высоты серьги путем изменения длины винтовой вставки позволят обеспечить увеличение (эффективной) высоты подвеса космического аппарата, что приведет к уменьшению угла наклона космического аппарата при проведении с ним подъемно-перегрузочных или стыковочных операций. Жесткое крепление хвостовика серьги относительно несущей балки при подъеме космического аппарата обеспечивает вращение траверсы при наклоне (перекосе) космического аппарата не по оси вращения серьги, а по точке соприкосновения проушины серьги с крюком крана, тем самым значительно увеличивая высоту траверсы без изменения ее габаритов, что позволяет в ряде случаев обойтись без регулировки высоты траверсы путем изменения длины винтовой вставки.
Кроме того, так как при пакетной схеме комплектования полезной нагрузки на адаптере в ряде случаев требуется установка космических аппаратов при определенном угле их наклона, предложенное устройство за счет вышеприведенной регулировки может обеспечить стыковку определенного космического аппарата с адаптером при требуемом угле наклона космического аппарата.
Предлагаемое устройство поясняется на фиг.1-3.
На фиг.1 изображен общий вид предлагаемой траверсы при подъеме космического аппарата.
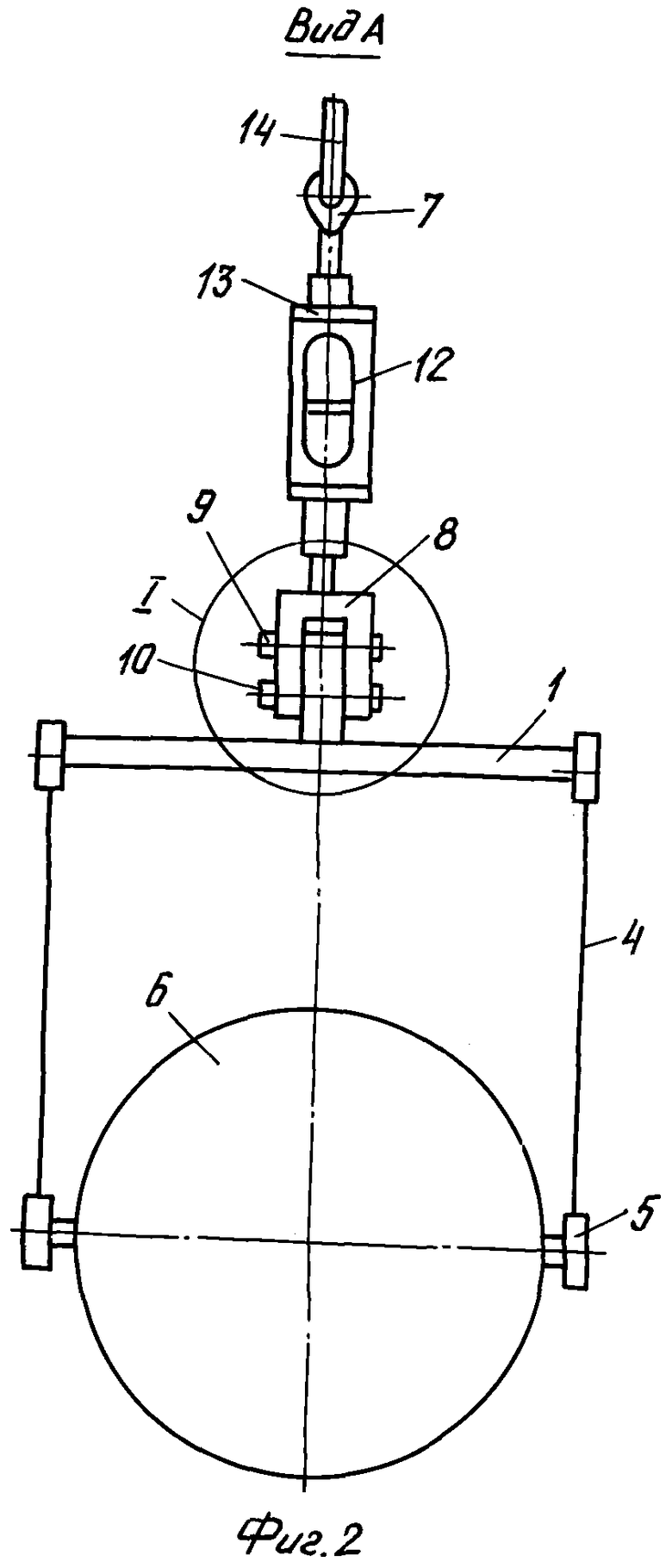
На фиг.2 представлен вид А согласно фиг.1.
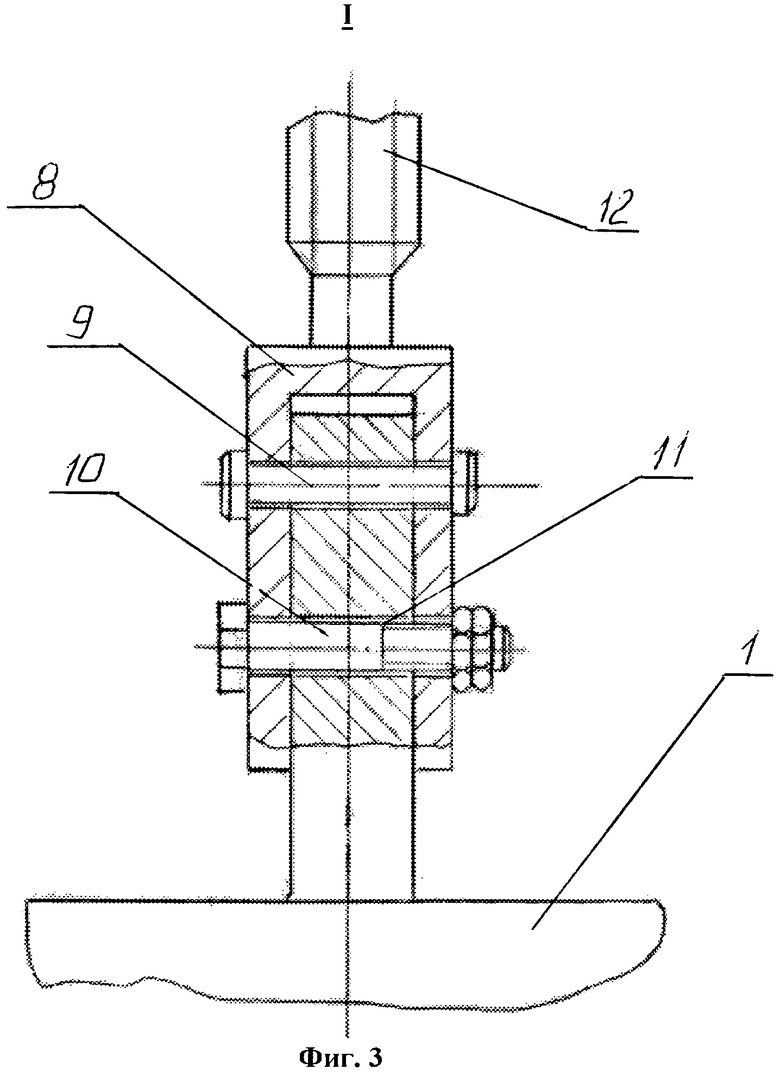
На фиг.3 показан выносной элемент 1 согласно фиг.2.
Траверса содержит несущую балку 1 (фиг.1) с шарнирно установленной на ней серьгой 2. На несущей балке 1 выполнены балансировочные гнезда 3, в которых закреплены стропы 4 с выполненными на них такелажными узлами 5 крепления космического аппарата 6. Серьга 2 состоит из проушины 7 (фиг.2) и хвостовика 8, связанного с несущей балкой 1 посредством шарнира 9. На хвостовике 8 серьги 1 ниже шарнира 9 (фиг.3), связывающего хвостовик 8 с несущей балкой 1, установлен стопор 10, размещенный с возможностью его взаимодействия с фиксирующим гнездом 11, выполненным на несущей балке 1. На серьге 2 между проушиной 7 и хвостовиком 8 установлена регулируемая винтовая вставка 12 (фиг.2), снабженная фиксатором 13.
Предлагаемое устройство функционирует следующим образом.
Перед началом работ стропы 4 устанавливаются и закрепляются в соответствующих балансировочных гнездах 3 несущей балки 1 (конкретный подбор балансировочных гнезд 3 проводится по паспортной центровке поднимаемого космического аппарата 6). В исходном положении траверса накидывается на крюк 14 (фиг.1) крана (кран на фиг. условно не показан). При этом для удобства захвата крюком 14 крана проушины 7 серьги 2 хвостовик 8 находится в расфиксированном состоянии (стопор 10 выведен из фиксирующего гнезда 11 несущей балки 1). После навески траверсы на крюк 14 крана серьга 2 жестко фиксируется относительно несущей балки 1 путем введения (фиг.3) стопора 10 хвостовика 8 в фиксирующее гнездо 11, выполненное на несущей балке 1. Затем производится подсоединение траверсы к поднимаемому космическому аппарату 6 (такелажные узлы 5 траверсы крепятся к космическому аппарату 6). Космический аппарат 6 на траверсе приподнимается на высоту примерно 0,5 метра. Так как центр масс космического аппарата 6 не находится на оси подвеса траверсы на крюке 14 крана, то при указанном подъеме поднимаемая система ("траверса - космический аппарат 6") стремится занять устойчивое положение (до размещения общего центра масс поднимаемой системы на оси подвеса), но при этом поднимаемый космический аппарат 6 наклоняется на определенный угол. С целью уменьшения угла наклона космического аппарата 6 путем изменения длины (высоты) регулируемой винтовой вставки 12 персонал добивается уменьшения угла наклона поднимаемого космического аппарата 6 до допустимых пределов, после чего длина регулируемой винтовой вставки 12 фиксируется фиксатором 13, выполненным, например, в виде гайки (изменение длины (высоты) регулируемой винтовой вставки 12 проводится при опущенном космическом аппарате 6 с учетом паспортной центровки поднимаемого космического аппарата 6).
После выполнения такелажной операции с использованием предлагаемой траверсы (перегрузка, стыковка с адаптером или ракетой-носителем) такелажные узлы 5 траверсы открепляются от космического аппарата 6.
Перед снятием траверсы с крюка 14 крана подпружиненный стопор 10 выводится из фиксирующего гнезда 11, выполненного на несущей балке 1, тем самым демонтируется жесткое крепление хвостовика 8 к несущей балке 1. Затем траверса опускается на пол и при последующем перемещении крюка 14 крана вниз крюк 14 выводится из проушины 7 серьги 2. При необходимости уменьшения высоты серьги 2 регулируемая винтовая вставка 12 приводится в исходное положение (предварительно регулируемая винтовая вставка 12 расфиксируется отведением фиксатора 13).
Угол наклона (перекоса) перегружаемого космического аппарата зависит от величины смещения его центра масс от вертикали, проходящей через ось вращения траверсы на крюке крана (далее по тексту - общая вертикаль), взаиморасположения такелажных узлов и центра масс перегружаемого космического аппарата, конструктивного исполнения такелажной оснастки.
При подъеме космического аппарата, центр масс которого смещен от вертикали, проходящей через ось вращения траверсы на крюке крана, момент, создаваемый весом космического аппарата относительно оси вращения траверсы на крюке крана, перемещает центр масс поднимаемого космического аппарата к вертикали, проходящей через ось вращения траверсы на крюке крана, наклоняя космический аппарат и траверсу. Перемещение центра масс космического аппарата происходит до положения, при котором момент от веса поднимаемого космического аппарата относительно оси вращения траверсы на крюке крана уравновешивается моментом от веса наклоненной траверсы. Следовательно, при известных массовых характеристиках траверсы и космического аппарата и геометрических параметрах такелажной системы "траверса - космический аппарат" можно расчетным путем определить требуемую настройку (высоту) регулируемой винтовой вставки, обеспечивающую проведение необходимой подъемной или стыковочной операции с конкретным космическим аппаратом при условии непревышения его допустимого угла наклона (перекоса).
Таким образом, предложенное устройство имеет существенные отличия от ранее известных траверс и позволяет обеспечить допустимый угол наклона (перекоса) перегружаемого (стыкуемого) космического аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА ДЛЯ ПЕРЕНОСОВ И ПРОВЕДЕНИЯ МОНТАЖНО-СТЫКОВОЧНЫХ РАБОТ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2323870C1 |
| ТРАВЕРСА | 2006 |
|
RU2329942C2 |
| ТРАВЕРСА | 2017 |
|
RU2703861C2 |
| ТРАВЕРСА | 2012 |
|
RU2526308C2 |
| ТРАВЕРСА ДЛЯ СТЫКОВКИ КРУПНОГАБАРИТНОГО КОСМИЧЕСКОГО АППАРАТА С РАКЕТОЙ-НОСИТЕЛЕМ, СНАБЖЕННОЙ НАДКАЛИБЕРНЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ | 2007 |
|
RU2362724C2 |
| ЦЕПНОЙ ПОДВЕС | 2012 |
|
RU2511761C1 |
| ТРАВЕРСА | 2017 |
|
RU2661671C1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| Монтажный подвес | 1977 |
|
SU660915A1 |
Изобретение относится к подъемно-перегрузочному оборудованию для проведения операции с космическими аппаратами. Траверса содержит несущую балку 1 с установленной на ней серьгой 2. На несущей балке 1 выполнены балансировочные гнезда 3, в которых закреплены стропы 4 с выполненными на них такелажными узлами 5 крепления космического аппарата 6. Серьга 2 состоит из проушины и хвостовика, связанного с несущей балкой 1 посредством шарнира. На хвостовике ниже шарнира, связывающего хвостовик с несущей балкой 1, установлен стопор с возможностью его взаимодействия с фиксирующим гнездом, выполненным на несущей балке 1. На серьге 2 между проушиной и хвостовиком установлена регулируемая винтовая вставка с фиксатором. После навески траверсы на крюк серьга жестко фиксируется стопором относительно несущей балки, что обеспечивает определенный угол наклона космического аппарата. Путем изменения длины регулируемой винтовой вставки серьги 2 корректируется угол наклона поднимаемого космического аппарата 6 к горизонтальной плоскости. Изобретение обеспечивает допустимый угол наклона космического аппарата. 1 з.п. ф-лы, 3 ил.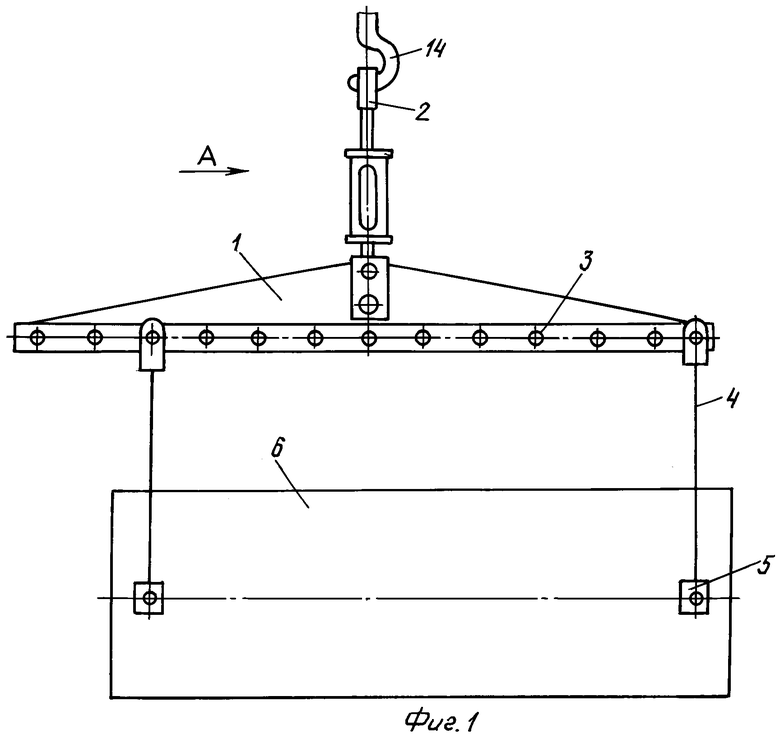
| Грузоподъемная траверса | 1980 |
|
SU927720A1 |
| Грузоподъемная траверса | 1980 |
|
SU927721A1 |
| US 4139179 A, 13.02.1979 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

