Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов, устройств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - с.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата изделий, передаточный механизм и привод (патент 2172240 (РФ), опубл. в БИ и П.М., 2001. - 23 - прототип).
Основным недостатком прототипа является сравнительная сложность структуры кинематической цепи и связанное с ней большое количество подвижных звеньев и кинематических пар, что снижает точность функционирования устройства и увеличивает энергозатраты на реализацию процесса.
Задачей настоящего изобретения является упрощение конструкции и повышение эффективности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде исполнительного механизма с выходными звеньями и губками для захвата изделий, передаточного механизма с ведущим и выходным звеньями и привода, выходное звено передаточного механизма выполнено в виде ведущего звена исполнительного механизма, при этом выходные звенья обоих механизмов подвижно сопряжены между собой.
Передаточный механизм выполнен в виде механизма со сложным движением кулисы, которая шарнирно связана с ведущим звеном и подвижно соединена с выходным звеном, при этом ведущее звено выполнено в виде кривошипа, укрепленного на валу привода, а выходное - в виде звена качания.
Выходные звенья исполнительного механизма укреплены шарнирно на свободном конце кулисы передаточного механизма.
Комбинированный механизм удовлетворяет структурной формуле кинематической цепи:
W=3•n-2p5-p4=3•4-2•5-1=1, (1)
где W - число степеней свободы выходных звеньев исполнительного механизма при поворотном движении относительно кулисы передаточного механизма;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, p5=5;
р4 - число высших кинематических пар, р4=1.
Передаточный механизм удовлетворяет условию:
λ = (r/d)<1, (2)
где λ - характерный параметр механизма: относительная длина ведущего звена;
r - длина ведущего звена;
d - расстояние между центрами вращения ведущего звена и качания выходного звена.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма.
Подвижное сопряжение выходных звеньев передаточного и исполнительного механизмов включает фигурные пазы, выполненные на поверхности выходного звена передаточного механизма, и ролики для взаимодействия с упомянутыми фигурными пазами, смонтированные на свободных концах выходных звеньев исполнительного механизма.
Заявляемое устройство отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения и взаимного расположения элементов. Эти отличия способствуют упрощению конструкции, снижению энергозатрат на процесс, повышению точности действия и в целом повышению эффективности работы устройства.
Выполнение выходного звена передаточного механизма в виде ведущего звена исполнительного механизма предельно упрощает схему комбинированного механизма: уменьшается число подвижных звеньев и кинематических пар. Это повышает точность перемещения губок для захвата изделий и уменьшает энергозатраты на процесс переноса изделий. Комбинированный механизм прототипа состоит из 10 подвижных звеньев и 15 кинематических пар, а комбинированный механизм предлагаемого устройства при аналогичном характере движения выходных звеньев с губками для захвата изделий содержит лишь 4 подвижных звена и 6 кинематических пар. Такое различие в структуре кинематической цепи определяет преимущество предложенного устройства в сравнении с прототипом.
Выполнение передаточного механизма в виде механизма со сложным движением кулисы, выходное звено и кулиса которого непосредственно соединены с исполнительным механизмом, исключает необходимость применения дополнительных конструктивных элементов в кинематической связи передаточного и исполнительного механизмов. Это упрощает конструкцию предлагаемого устройства.
Шарнирное соединение выходных звеньев исполнительного механизма с кулисой передаточного механизма дает возможность выходным звеньям с губками для захвата изделий совершать вместе с кулисой поворотные и поступательные движения без применения каких-либо промежуточных звеньев. Это уменьшает число движущихся масс и соответственно энергозатраты на процесс при работе устройства.
Формула (1) выражает соответствие предложенного комбинированного механизма первому условию работоспособности, которое определяется формулой Чебышева. Выходные звенья исполнительного механизма с губками для захвата изделий совершают сложное движение, состоящее из трех простых движений: поворотного движения вместе с кулисой передаточного механизма, поступательного движения вместе с кулисой, поворотного движения относительно кулисы. Первые два движения являются очевидными, поскольку упомянутые выходные звенья шарнирно соединены с кулисой. Что же касается формулы (1), то она показывает, что при одном ведущем звене передаточного механизма схема позволяет реализовать поворотное движение выходных звеньев исполнительного механизма относительно кулисы. В формуле (1) расчет сделан на одно выходное звено исполнительного механизма, поскольку второе звено выступает как элемент пассивной связи и на конечный результат расчета не влияет. При учете обоих выходных звеньев (и любого возможного их числа) формула дает тот же результат, а именно:
W=3•n-2р5-р4=3•5-2•6-2=1,
где W - число степеней свободы выходных звеньев исполнительного механизма при поворотном движении относительно кулисы передаточного механизма;
n - число подвижных звеньев, n=5;
р5 - число низших кинематических пар, р5=6;
р4 - число высших кинематических пар, р4=2.
В передаточном механизме, который удовлетворяет формуле (2), кулиса, шарнирно связанная с кривошипом, совершает кроме возвратно-поступательного возвратно-поворотное движение. Этим обеспечивается прямой и обратный ход выходных звеньев исполнительного механизма. Неравенство λ<1 определяет существование механизма со сложным движением кулисы.
В предлагаемом устройстве губки для захвата изделий жестко крепятся к выходным звеньям исполнительного механизма, поскольку в процессе работы устройства они должны имитировать движение упомянутых выходных звеньев, при этом жесткое крепление может быть выполнено разъемным или неразъемным.
Выполнение подвижного сопряжения выходных звеньев передаточного и исполнительного механизмов в виде фигурных пазов на выходном звене передаточного механизма и роликов, смонтированных на выходных звеньях исполнительного механизма, для взаимодействия с фигурными пазами дает возможность губкам для захвата изделий совершать поворотные движения относительно кулисы по любому предпочтительному закону, определяемому профилями фигурных пазов.
Предлагаемое устройство типа "рука" для передачи изделий поясняется чертежами.
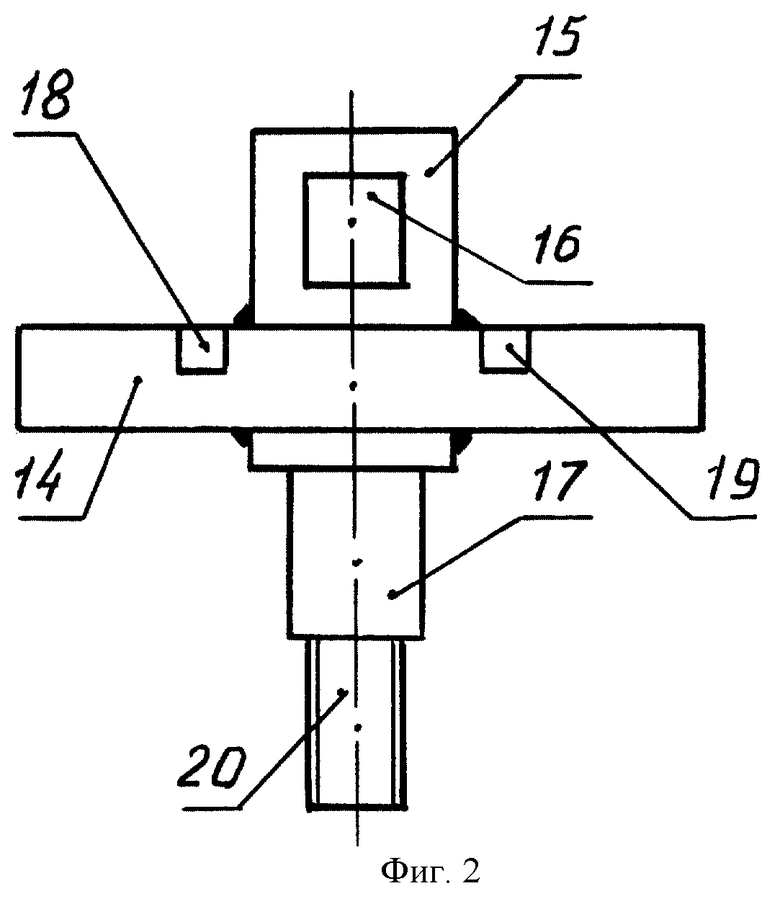
На фиг.1 изображена кинематическая схема устройства; на фиг.2 - выходное звено передаточного механизма.
Устройство содержит комбинированный механизм 1, который включает исполнительный механизм 2 с губками 3 для захвата изделий, передаточный механизм 4 и привод 5.
Механизм 4 включает кривошип 6, выходное звено 7 и промежуточное звено - кулису 8. Кривошип 6 жестко закреплен на валу привода 5, кулиса 8 шарнирно связана с кривошипом и подвижно сопряжена с выходным звеном. Выходное звено 7 выполнено в виде звена качания и шарнирно связано со стойкой.
Исполнительный механизм 2 включает выходные звенья 9 и 10, шарнирно связанные с кулисой 8 посредством пальца 11, жестко закрепленного на свободном конце кулисы, на выходных звеньях механизма жестко закреплены губки 3 для захвата изделий. Для сопряжения с выходным звеном 7 передаточного механизма 4 на звеньях 9 и 10 смонтированы ролики 12 и 13.
Выходное звено 7 передаточного механизма 4 выполнено в виде фигурного конструктивного элемента (фиг.2), содержащего плиту 14, на которой закреплены направляющая 15 с прямоугольным продольным отверстием 16 для сопряжения с кулисой 8 и палец 17 для шарнирной связи плиты со стойкой. В теле плиты 14 по обеим сторонам относительно направляющей 15 выполнены фигурные продольные пазы 18 и 19 соответственно для роликов 12 и 13, смонтированных на выходных звеньях 9 и 10 исполнительного механизма 2. Палец 17 выполнен в виде ступенчатого цилиндра, концевая часть 20 пальца имеет меньший диаметр и снабжена резьбой для крепежного элемента, например гайки и контргайки, исключающего осевое перемещение плиты 14 относительно неподвижной стойки.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 кривошип 6, закрепленный на приводном валу, совершает вращательное движение, которое посредством кулисы 8 преобразуется в возвратно-поворотное движение выходного звена 7. Одновременно с этим совершают поворотные движения и выстой относительно кулисы выходные звенья 9 и 10 исполнительного механизма, несущие губки 3 для захвата изделий. Это обеспечивается в результате поступательного движения кулисы 8 и шарнирно связанных с ней выходных звеньев 9 и 10, ролики 12 и 13 которых взаимодействуют соответственно с фигурными пазами 18 и 19 на плите 14 звена 7.
Границы рабочих и холостых ходов выходных звеньев 9 и 10 с губками 3 для захвата изделий определяются относительными положениями кривошипа 6 и кулисы 8 передаточного механизма. Для положения, при котором кулиса лежит на линии, соосной оси кривошипа, образуя с последним прямую, имеет место одна граница; для положения, когда кривошип совпадает с кулисой, проходящей через центр его вращения, имеет место другая граница. При таком выборе границ временные интервалы рабочих и холостых ходов выходных звеньев с губками для захвата изделий оказываются равными.
Границы рабочих и холостых ходов могут быть приняты в положениях, когда кулиса перпендикулярна кривошипу. В этом случае временные интервалы упомянутых ходов не равны. Больший интервал целесообразно использовать в качестве рабочего хода, поскольку передача изделий при меньшей скорости рабочего хода и том же периоде кинематического (рабочего) цикла дает возможность уменьшить энергозатраты на реализацию процесса.
В обоих вариантах выбора границ рабочих и холостых ходов палец 11, закрепленный на конце кулисы 8, и шарнирно связанные с ним губки 3 для захвата изделий будут перемещаться при рабочем и холостом ходах по разным траекториям. Траектория губок за цикл движения будет представлять собой замкнутую фигуру с горизонтальной и вертикальной осями симметрии.
Губки 3, закрепленные на выходных звеньях 9 и 10 исполнительного механизма 2, при работе устройства совершают вместе с кулисой 8 поворотное и поступательное движения, а также поворотное движение относительно кулисы. Кроме того, они совершают выстой заданной продолжительности относительно кулисы. Этим обеспечивается возможность выбора закона движения губок, предпочтительно для передаваемых изделий. В зависимости от рабочих профилей пазов 18 и 19 на плите 14 выходного звена 7 передаточного механизма каждая из губок при необходимости может совершать движение по закону, отличающемуся от закона движения другой губки.
Губки, находясь в разжатом положении, совершают выстой заданной продолжительности при "схвате" изделия (в начале рабочего хода) и при выдаче изделия (в конце рабочего хода). При переносе изделий из позиции "схвата" в позицию выдачи, а также при холостом ходе (без изделия) состояние губок - сжатое.
Выполнение устройства для передачи изделий в виде комбинированного механизма, в котором передаточный механизм выполнен в виде механизма со сложным движением кулисы, а выходные звенья исполнительного механизма подвижно сопряжены с выходным звеном передаточного механизма и шарнирно связаны с его кулисой, дает возможность упростить конструкцию путем уменьшения числа подвижных звеньев и кинематических пар и повысить эффективность устройства путем снижения энергозатрат на процесс передачи изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2245780C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов, устройств различного целевого назначения. Устройство содержит комбинированный механизм, выполненный в виде исполнительного механизма с выходными звеньями и губками, передаточного механизма с ведущим и выходными звеньями и привода. Выходное звено передаточного механизма выполнено в виде ведущего звена исполнительного механизма. При этом выходные звенья обоих механизмов подвижно сопряжены между собой. Передаточный механизм выполнен в виде механизма со сложным движением кулисы, которая шарнирно связана с ведущим звеном и подвижно соединена с выходным звеном. При этом ведущее звено передаточного механизма выполнено в виде кривошипа, укрепленного на валу привода, а выходное звено - в виде звена качания. Выходные звенья исполнительного механизма укреплены шарнирно на свободном конце кулисы передаточного механизма. Подвижное сопряжение выходных звеньев передаточного и исполнительного механизмов включает фигурные пазы на поверхности выходного звена передаточного механизма и ролики для взаимодействия с фигурными пазами, смонтированные на свободных концах выходных звеньев исполнительного механизма. Изобретение позволит упростить конструкцию и повысить эффективность работы устройства. 6 з.п. ф-лы, 2 ил.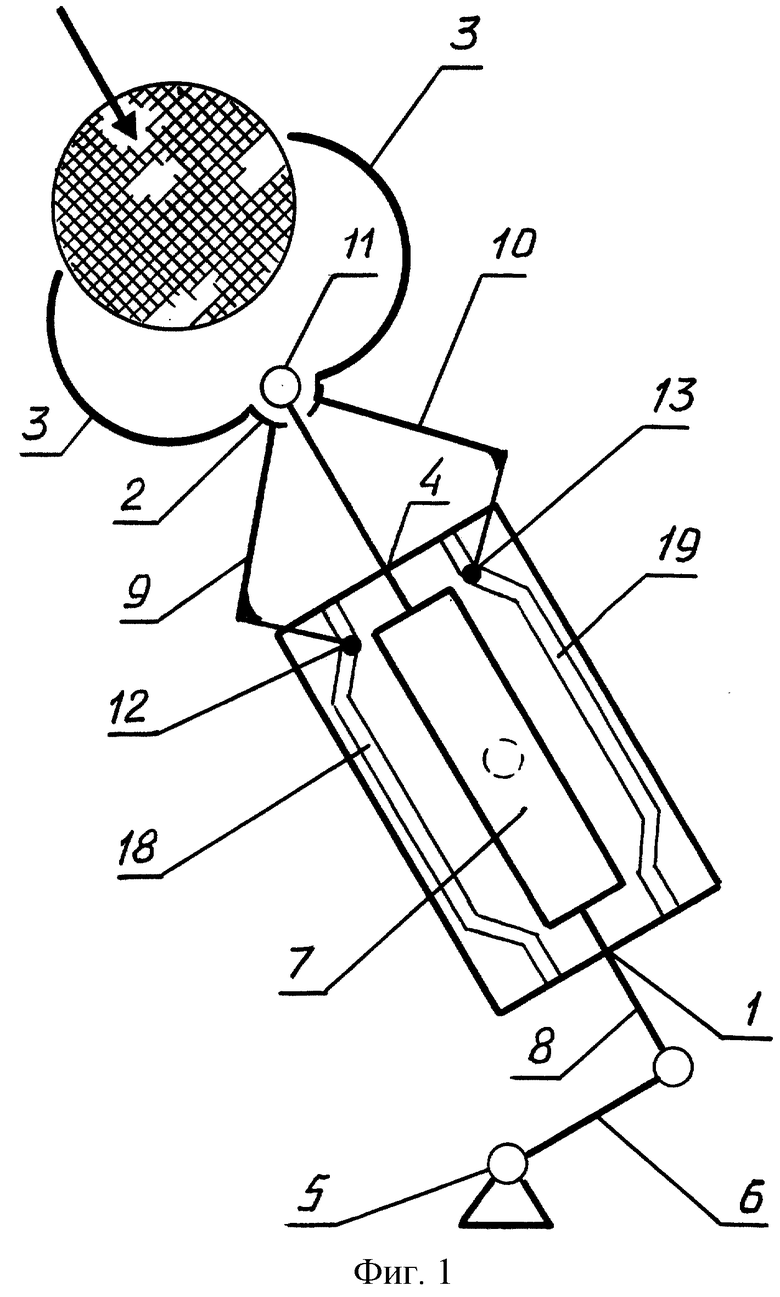
W=3•n-2•p5-p4-3•4-2•5-1=1,
где W - число степеней свободы выходных звеньев исполнительного механизма при поворотном движении относительно кулисы передаточного механизма;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, р5=5;
р4 - число высших кинематических пар, р4=1.
λ = (r/d)<1,
где λ - характерный параметр механизма: относительная длина ведущего звена,
r - длина ведущего звена;
d - расстояние между центрами вращения ведущего звена и качания выходного звена.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

