Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа “рука” для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм, исполнительный механизм с губками для захвата изделий и привод (патент №2191108 (РФ), опубл. в БИПМ, 2002. - №29) - прототип. Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является сравнительно большое число движущихся масс (конструктивных элементов) и пар трения, которые увеличивают энергозатраты на процесс передачи изделий, снижают точность работы и производительность устройства. Большое число движущихся масс приводит к необходимости уменьшения скорости движения звеньев, а это удлиняет период рабочего цикла (снижает производительность). Зазоры большого числа кинематических пар приводят к ошибкам положения и перемещения звеньев. Это снижает точность работы устройства.
Задачей настоящего изобретения является упрощение конструкции, повышение точности работы и производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа “рука” для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, ползуна, подвижно соединенного с выходными звеньями обоих механизмов и сопряженного с ведущим звеном исполнительного механизма и привода, на ползуне жестко закреплены вилкообразные стержни, а на свободных концах выходных звеньев исполнительного механизма смонтированы ролики для сопряжения с упомянутыми вилкообразными стержнями, при этом последние расположены перпендикулярно продольной оси ползуна.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, обеспечивающими упрощение конструкции, повышение точности работы и производительности. Устройство удовлетворяет первому условию работоспособности, определяемому формулой Чебышева
W=3·n-2p5-p4=3·4-2·4-3=1,
где W - степень подвижности устройства, W=1;
n - число подвижных звеньев: кривошип, кулиса, ползун, выходное звено исполнительного механизма, n=4;
p5 - число низших кинематических пар: кривошип - стойка, кулиса - стойка, ползун - кулиса, выходное звено исполнительного механизма - кулиса, р5=4;
р4 - число высших кинематических пар: ролик кривошипа - кулиса, вилка стержня ползуна - ролик выходного звена, ролик ползуна - профильный паз ведущего кулачка исполнительного механизма, р4=3.
Сопряжение выходных звеньев исполнительного механизма с ползуном посредством высших кинематических пар уменьшает число подвижных звеньев и пар трения скольжения. Это позволяет уменьшить энергозатраты на процесс, повысит производительность устройства и точность его работы. Оснащение ползуна жестко закрепленными на нем вилкообразными стержнями, расположенными перпендикулярно продольной оси ползуна, является предпочтительным с точки зрения углов передачи, т.е. из условия обеспечения силовой работоспособности устройства.
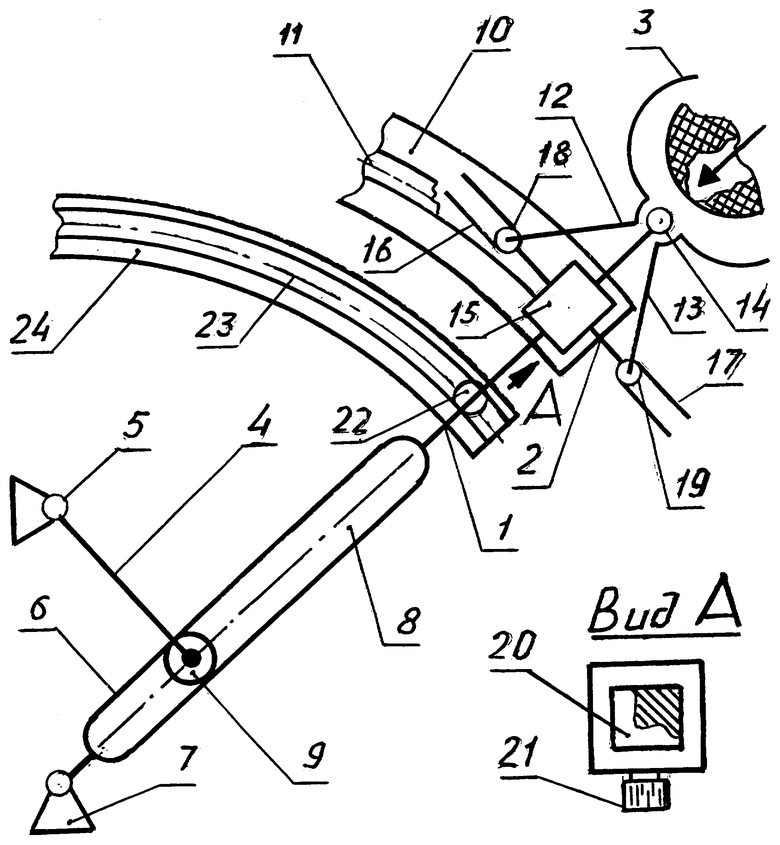
Предлагаемое устройство типа “рука” для передачи изделий поясняется чертежом. На фигуре изображена кинематическая схема устройства.
Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма 1, исполнительного механизма 2 с губками 3 для захвата изделий, ползуна и привода, последний на чертеже не показан.
Механизм 1 включает кривошип 4, жестко закрепленный на валу 5 привода и кулису 6, выполненную в виде стержня, шарнирно связанного со стойкой 7. В теле кулисы выполнен сквозной продольный паз 8, а на свободном конце кривошипа 4 смонтирован ролик 9 для сопряжения с упомянутым пазом кулисы.
Исполнительный механизм 2 содержит ведущее звено, выполненное в виде неподвижного кулачка 10 с профильным пазом 11, и выходные звенья 12 и 13, шарнирно связанные с кулисой 6 посредством пальца 14, жестко закрепленного на свободном конце кулисы. Губки 3 для захвата изделий жестко закреплены на звеньях 12 и 13. Упомянутое закрепление губок на выходных звеньях и пальца 14 на кулисе 6 выполнены разъемными. Этим обеспечивается технологичность операции сборки и разборки.
Кинематическая связь передаточного и исполнительного механизмов устройства содержит шарнирное соединение выходных звеньев обоих механизмов между собой и ползун 15, который подвижно связан с кулисой 6 и сопряжен с выходными звеньями 12 и 13. На ползуне 15 жестко закреплены вилкообразные стержни 16 и 17, вилки последних взаимодействуют с роликами 18 и 19, смонтированными на свободных концах звеньев 12 и 13. Стержни 16 и 17 закреплены на ползуне под прямым углом относительно его продольной оси.
Ползун 15 выполнен в виде пустотелой призмы с продольным каналом 20 прямоугольной формы для подвижного сопряжения с кулисой 6. На ползуне смонтирован ролик 21 для сопряжения с профильным пазом 11 кулачка 10.
В средней части кулисы 6 смонтирован ролик 22 для взаимодействия с пазом 23 неподвижной плиты 24. Взаимодействие с плитой уменьшает упругие деформации кулисы 6, несущей выходные звенья исполнительного механизма с губками для захвата изделий. Это повышает точность работы устройства.
Устройство типа “рука” для передачи изделий работает следующим образом.
При работе привода вал 5 с закрепленным на нем кривошипом 4 совершает вращение, которое посредством ролика 9 преобразуется в возвратно-поворотное (качательное) движение кулисы 6. Вместе с кулисой угловое перемещение совершают выходные звенья 12 и 13, шарнирно связанные с кулисой посредством пальца 14. При повороте кулисы 6 ролик 21 взаимодействует с профильным пазом 11 кулачка 10, в результате чего ползун 15 перемещается вдоль кулисы.
Поступательное движение ползуна 15 преобразуется в поворотное движение выходных звеньев 12 и 13 исполнительного механизма 2.
При работе устройства выходные звенья 12 и 13 совершают возвратно-поворотные движения с центром качания на оси пальца 14. При этом в соответствии с текущим положением выходных звеньев губки 3 занимают разжатое или сжатое положение. На границе интервалов прямого (рабочего) и обратного (холостого) ходов губки занимают разжатое положение. При этом одна из границ соответствует позиции “схват изделия”, другая - позиции “выдача изделия”,
В интервале рабочего хода устройства губки 3 занимают сжатое положение, выполняя операцию переноса изделия в позицию его выдачи. При этом губки удерживают изделие, переносимое по дугообразной траектории из одной позиции в другую. По завершении рабочего хода губки разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. При выполнении холостого хода устройства (без изделия) губки занимают сжатое положение как и при рабочем ходе, поскольку ролик 21 ползуна 15 продолжает взаимодействовать с профильным пазом 11 кулачка 10.
В интервале кинематического цикла губки 3 совершают сложное движение, состоящее из двух простых движений: возвратного движения по дугообразной траектории вместе с кулисой 6 и возвратно-поворотного движения с выстоями относительно упомянутой кулисы.
При работе устройства ролик 22 взаимодействуют с дугообразным пазом 23 неподвижной плиты 24. Это исключает прогиб кулисы 6 и ее упругие деформации при движении.
Предложенная кинематическая связь выходных звеньев передаточного и исполнительного механизмов устройства позволяет, в сравнении с прототипом, упростить конструкцию, повысить точность работы и производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243882C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и устройств различного назначения. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, ползуна, подвижно соединенного с выходными звеньями обоих механизмов и сопряженного с ведущим звеном исполнительного механизма, и привода. На ползуне жестко закреплены вилкообразные стержни, а на свободных концах выходных звеньев исполнительного механизма смонтированы ролики для сопряжения с упомянутыми вилкообразными стержнями. При этом вилкообразные стержни расположены перпендикулярно продольной оси ползуна. Изобретение позволит упростить конструкцию, повысить точность работы и производительность устройства. 1 ил.
Устройство типа “рука” для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, ползуна, подвижно соединенного с выходными звеньями обоих механизмов и сопряженного с ведущим звеном исполнительного механизма, и привода, отличающееся тем, что на ползуне жестко закреплены вилкообразные стержни, а на свободных концах выходных звеньев исполнительного механизма смонтированы ролики для сопряжения с упомянутыми вилкообразными стержнями, при этом вилкообразные стержни расположены перпендикулярно продольной оси ползуна.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

