Изобретение относится к авиационной технике, преимущественно к вертолетостроению, и касается проектирования основных органов управления на рабочем месте пилота, оборудованного энергопоглощающим креслом.
Известно, что оснащение вертолетов энергопоглощающими креслами направлено на обеспечение выживаемости, в частности экипажа, при аварийном падении вертолета и поглощения при этом энергии удара за счет амортизационного перемещения (вниз) кресла (см. стр.7-8 «Helicopter crashworthy seat», проспект фирмы Martin-Baker Aircraft CoLtd., Англия, 1988).
Величина амортизационного перемещения кресла непосредственно влияет на фактор выживаемости, который в практике вертолетостроения соотносят с допустимой величиной вертикальной скорости Vy соударения вертолета с землей. По статистике в 95% летных происшествий с вертолетами величина Vy лежит в границах 10 м/с - 12 м/с, что в пределах переносимости человеком кратковременных перегрузок требует амортизационного перемещения кресла на величину 0,2 м - 0,35 м. Однако этот способ защиты от аварийных ударных нагрузок эффективен лишь в случаях определенного пространственного положения вертолета в момент удара о землю, ограниченного незначительными изменениями углов тангажа и крена по отношению к их значениям в условиях нормального полета вертолета. Это свидетельствует, что в аварийных ситуациях динамика работы пилота органами управления возрастает и сохраняется вплоть до момента удара вертолета о землю. Следовательно, рабочая поза пилота в этих условиях достаточно напряжена, и при указанных выше значениях амортизационного перемещения кресла в момент удара имеет место высокая вероятность травмирования пилота об органы управления.
Вероятность травмирования обосновывается двумя основными аспектами:
- первый - ударное в течение сотых долей секунды перемещение кресла вниз приводит к существенной перегруппировке рабочей позы пилота относительно органов управления, к резким изменениям межсуставных сочленений конечностей и, как следствие, переломам и разрывам связок. Как показывают копровые испытания энергопоглощающих кресел при амортизационном перемещении последних, начиная с величины 0,2 м, наблюдается рост травмоопасных нагрузок в тазобедренном суставе манекена, зафиксированного привязной системой и при неизменном положении педалей;
- второй - так как аварийное соударение вертолета с землей происходит, как правило, при наличии горизонтальной Vx составляющей скорости удара, то инерциальная нагрузка от последней приводит к энергичному кивку вперед головы и туловища пилота, которые в совокупности с амортизационным перемещением кресла вниз допускают высокую вероятность травмируемости головы пилота о ручку продольно-поперечного управления.
Известно техническое решение, частично решающее эту проблему травмобезопасности. В патенте США №4655416, кл. В 64 D 25/00 кабина оборудована энергопоглощающим креслом с возможностью перемещения под действием ударной нагрузки при аварии летательного аппарата, а ручка продольно-поперечного управления смонтирована перед креслом на поршне-рычажном механизме, соединенном детонационным шнуром с пиротехническим приспособлением, которое установлено за спинкой кресла. Приспособление срабатывает при перемещении кресла вниз и через поршне-рычажный механизм смещает ручку продольно-поперечного управления от пилота, снижая этим вероятность соударения ее с головой пилота.
Однако недостатком этого технического решения, применительно к вертолету, являются высокие импульсные нагрузки на кисть руки пилота, складывающиеся как от амортизационного перемещения кресла вниз, так и от пиротехнического отброса ручки продольно-поперечного управления от пилота. Как было отмечено выше, пилот вертолета удерживает органы управления вплоть до контакта вертолета с землей, следовательно, вероятность травмирования руки не только сохраняется, но и возрастает.
Более близким к положительному решению этого вопроса является техническое решение по патенту ФРГ №3104503, кл. В 64 С 27/56, содержащее энергопоглощающее кресло, установленное на направляющих с возможностью перемещения в плоскости, близкой к вертикальной, и соединенное с подвижным в этой плоскости элементом амортизатора, ручку продольно-поперечного управления (ручку циклического шага), закрепленную на устройстве подвески, находящемся на чашке кресла, шарнирную тягу, которая расположена под креслом и закреплена одним концом к рычагу ручки циклического шага, а другим - к рычагу проводки продольно-поперечным управлением, а также ручки общего шага, закрепленной шарнирно на стенке кабины вертолета, и систему тяг и качалок проводки управления.
По этому техническому решению при амортизационном перемещении кресла происходит совместное перемещение с ним только ручки продольно-поперечного управления. Ручка общего шага, установленная независимо от кресла, остается неподвижной при амортизационном перемещении кресла и, этим самым, сохраняется опасность травмирования руки пилота.
Решение проблемы травмобезопасности при амортизационном перемещении кресла в предлагаемом изобретении рассматривается комплексно и затрагивает все органы управления, включая ручку продольно-поперечного управления, ручку общего шага и педали путевого управления.
Суть изобретения состоит в том, что устройство подвески ручки продольно-поперечного управления выполнено в виде рычажного механизма, соединенного с ручкой общего шага, механизмом перемещения педалей путевого управления и подвижным элементом амортизатора энергопоглощающего кресла, причем перемещению кресла соответствует ответное в том же направлении и приблизительно равное по величине перемещение ручек продольно-поперечного и общего шага управления, а перемещение педалей путевого управления - в направлении от пилота на величину не более 0,3-0,35 хода подвижного элемента амортизатора. Сам рычажный механизм выполнен как минимум из двух соединенных посредством шатуна коромысел, первое коромысло выполнено в виде стержня, на свободном конце которого шарнирно закреплена ручка продольно-поперечного управления, другой конец, через качалку, соединен с тягой проводки поперечного управления, а ось качалки проводки продольного управления расположена соосно оси подвески этого коромысла, второе коромысло свободным концом, посредством тяги, соединено с подвижным элементом амортизатора, а другим концом - с механизмом перемещения педалей путевого управления, кроме того, на втором коромысле шарнирно закреплен рычаг, соединенный тягами с ручкой и проводкой управления общим шагом.
Шатун установлен подвижно в осевом направлении на первом коромысле и шарнирно, посредством цапф, соединен со вторым коромыслом. Механизм перемещения педалей путевого управления выполнен в виде двух рычагов, один из которых двуплечий, установленных на общей оси, неподвижно закрепленной в кабине вертолета, при этом одно плечо двуплечего рычага соединено со вторым рычагом механизмом регулировки педалей под рост пилота, другое кинематически соединено с коромыслом рычажного механизма, а сами педали смонтированы на втором рычаге. Механизм же регулировки педалей под рост пилота выполнен в виде винтовой пары.
Предлагаемое техническое решение иллюстрируется чертежами, где:
на фиг.1 показана схема взаимного положения органов управления и кресла, с находящимся в нем пилотом, до и после амортизационного перемещения последнего;
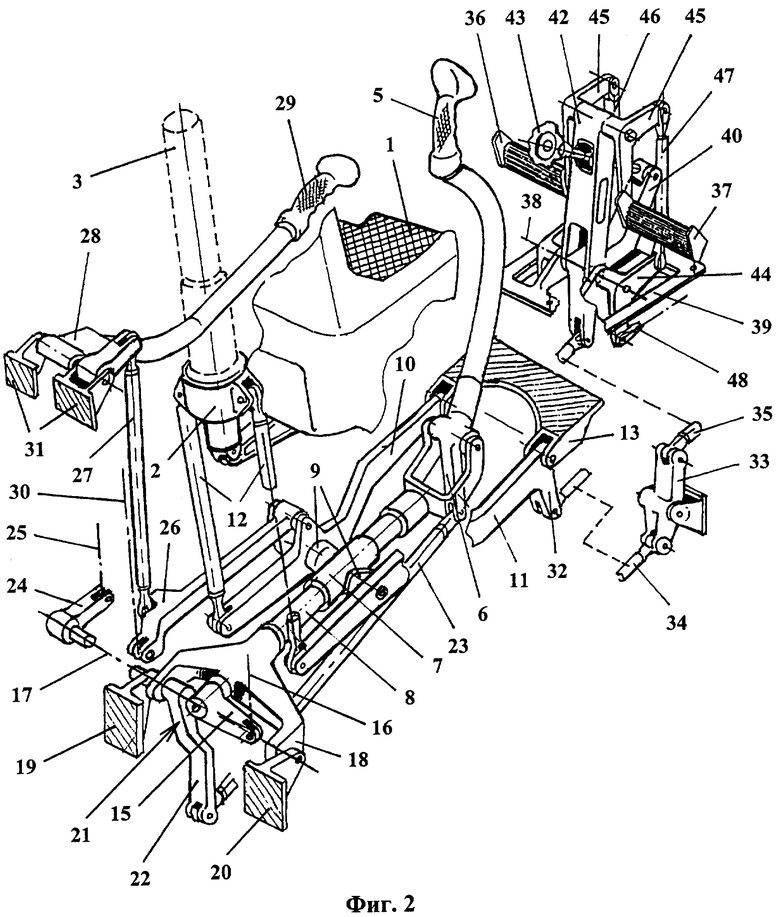
на фиг.2 - конструктивное решение предлагаемого изобретения.
Кабина вертолета с травмобезопасными органами управления содержит энергопоглощающее кресло 1 с возможностью перемещения близкого к вертикальному и соединенного с подвижным элементом 2 амортизатора 3, который закреплен на стенке 4 кабины вертолета, ручку продольно-поперечного управления 5 с рычагом 6, закрепленную на устройстве подвески, представляющем собой рычажный механизм, выполненный как минимум из двух коромысел, соединенных посредством шатуна 7, который установлен подвижно в осевом направлении на одном из коромысел 8, выполненном в виде стержня, и посредством цапф 9 шарнирно соединен с одним или, как в предлагаемом примере, двумя симметрично расположенными вторыми коромыслами 10 и 11. Последние, в свою очередь, соединены свободными концами посредством тяг 12 с подвижным элементом 2 амортизатора 3. Сами коромысла 10 и 11 шарнирно подсоединены к кронштейну 13, жестко закрепленному к конструкции пола 14 кабины вертолета. На свободном от заделки конце коромысла 8 шарнирно закреплена ручка 5 продольно-поперечного управления, а к другому концу коромысла 8 жестко подсоединена качалка 15, соединенная с тягой 16 (на фиг.2 показана только ось тяги) проводки поперечного управления, причем качалка 15 расположена так, что ось шарнира сочленения ее с тягой 16 лежит в плоскости оси 17 подвески коромысла 8. Само же коромысло 8 посредством узла подвески 18 шарнирно закреплено на кронштейнах 19, 20, установленных на стенке 4 кабины вертолета под креслом 1. Кроме того, соосно с осью 17 подвески коромысла 8 установлена двуплечая качалка 21, которая одним плечом 22 и тягу 23 соединена с рычагом 6 ручки 5 продольно-поперечного управления, а другим плечом 24 соединено с тягой 25 (на фиг.2 показана только ось тяги) проводки продольного управления. На вторых коромыслах, в частности на одном из них 10, шарнирно закреплен рычаг 26, к свободному концу которого подсоединена тяга 27 кинематической связи рычага 28 с ручкой 29 общего шага и тяга 30 (на фиг.2 показана только ось тяги) проводки управления общим шагом, а сама ручка 29 общего шага посредством кронштейна 31 закреплена на стенке 4 кабины вертолета. Другое коромысло 11 снабжено рычагом 32, который через двуплечую качалку 33 и тяги 34, 35 соединен с механизмом перемещения педалей 36, 37 путевого управления. Механизм перемещения педалей содержит два рычага, установленных на общей оси 38, неподвижно закрепленной через кронштейн 39 к конструкции пола 14 кабины. Один рычаг 40 двуплечий, соединен одним плечом с тягой 35 кинематической связи с коромыслом 11, а другим плечом через механизм регулировки педалей под рост пилота 41 с другим одноплечим рычагом 42, при этом механизм регулировки педалей выполнен в виде винтовой пары 43 с плавающими гайками (не показаны), установленных соответственно на рычагах 40 и 42. Кроме того, на оси 38 подвески рычагов 40 и 42 и на свободном конце рычага 42 шарнирно смонтированы и симметрично расположены относительно указанных рычагов по две двуплечие качалки 44 и 45.
Качалки попарно и шарнирно соединены тягами 46 и 47, образуя совместно с рычагом 42 рычажно-параллелограммную подвеску, а педали 36, 37 шарнирно подвешены соответственно на свободных плечах качалок 45. Тяги 48 проводки путевого управления подсоединены к свободным плечам качалок 44.
Работа системы травмобезопасных органов управления при аварийном перемещении энергопоглощающего кресла осуществляется следующим образом.
При аварийном приземлении вертолета под действием ударной нагрузки энергопоглощающее кресло 1 вместе с сидящим на нем пилотом 41 перемещается вниз. Одновременно с перемещением кресла 1 происходит перемещение подвижного элемента 2 амортизатора 3, который через тяги 12 приводит в движение рычажный механизм подвески ручки 5 продольно-поперечного управления, в частности вторые коромысла 10 и 11. Вторые коромысла 10 и 11 через шатун 7 приводят в движение коромысло 8.
Из работы параллелограммного механизма, образованного тягой 23, рычагом 6, плечом 22 двуплечей качалки 21 и коромыслом 8, следует, что рычаг 6 с ручкой 5 продольно-поперечного управления не меняет своего углового положения относительно плеча 22 качалки 21 на всем участке поворота коромысла 8. А условия расположения качалки 15 на коромысле 8 при его повороте не приводят к изменению поперечного углового положения ручки 5 продольно-поперечного управления. Из этого следует, что ручка 5 при перемещении кресла 1 движется практически в том же направлении и приблизительно на ту же величину, что и кресло, не оказывая влияния на положение тяг 25 и 16 продольно-поперечного управления.
Кроме того, поворот коромысел 10 и 11 приводит в движение рычаг 26, установленный на коромысле 10 и связанный тягами 27 и 30 с управлением общим шагом. Подвеска на коромысле 10 рычага 26 и плечи, которыми он стыкуется с тягой 27 и через рычаг 28 с ручкой 29 управления общим шагом, а также с тягой 30 проводки управления общим шагом подобраны таким образом, что при повороте коромысла 10, а вместе с ним и рычага 26 тяга 30 практически не перемещается в вертикальной плоскости, обеспечивая этим неизменность положения в проводке управления общим шагом, а тяга 27 имеет перемещение по вертикали. При этом за счет выбора определенного положения кронштейна 31 на стенке 4 кабины относительно кресла 1 и передаточного отношения плеча рычага 28 к соответствующему плечу рычага 26 обеспечивается движение ручки 29 по траектории, близкой, а по величине приблизительно равной перемещению кресла 1.
Одновременно, при повороте коромысел 10 и 11 поворачивается рычаг 32, смонтированный на коромысле 11, который через тягу 34 поворачивает двуплечую качалку 33, а последняя тягой 35 приводит в движение двуплечий рычаг 40, который в свою очередь посредством винтовой пары 43 механизма регулировки педалей поворачивает рычаг 42 и этим самым перемещает педали 36, 37 в направлении от пилота. Наличие в проводке путевого управления загрузочных механизмов (не показаны) обеспечивается неизменность взаимного исходного положения двуплечих качалок 44 и 45, а следовательно, и тяг 48 проводки путевого управления.
Подбором плеч рычага 32, двуплечей качалки 33 и рычагов 40 и 42 обеспечивается величина перемещения педалей в пределах не более 0,3-0,35 хода подвижного элемента 2 амортизатора (или, что то же самое, кресла), что достаточно для обеспечения 95% уровня толерантности в условиях действия на пилота внешних ударных нагрузок и, как следствие, безопасной перегруппировки его рабочей позы. Угловые параметры в тазобедренном и коленном суставах пилота 41 в результате перегруппировки его рабочей позы соответствуют данным для экстремальных условий (см. стр.396, Roebuck Ir.I.A. Kroemer K.H.E. Thomson W.G. «Engineering anthropometry methods». New York, 1975) и не выходят за рекомендованные пределы - 110°-120°.
Предлагаемое техническое решение реализовано на опытном вертолете ОАО «Камов» в комплектации с энергопоглощающим креслом.
Таким образом, кинематическая взаимосвязь энергопоглощающего кресла 1 с ручкой 5 продольно-поперечного управления и ручкой 29 общего шага обеспечивает пилоту 41 травмобезопасность за счет сохранения практически неизменным положения органов ручного управления относительно кресла в процессе его амортизационного перемещения, что исключает травмирование рук и головы при возможном ее кивке, а наличие кинематической связи с механизмом перемещения педалей 36, 37 путевого управления обеспечивает сохранность безопасной рабочей позы пилота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ И РАЗДВИЖНАЯ ТЯГА ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2013 |
|
RU2527574C1 |
| АМОРТИЗАЦИОННОЕ КРЕСЛО | 2000 |
|
RU2198827C2 |
| ВЕРТОЛЕТ | 2004 |
|
RU2263607C1 |
| АВТОЖИР, СПОСОБ ЕГО ПРЕОБРАЗОВАНИЯ В СТОЯНОЧНОЕ ПОЛОЖЕНИЕ И СПОСОБ РЕГУЛИРОВАНИЯ ЕГО ЦЕНТРОВКИ | 1992 |
|
RU2005657C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ | 2006 |
|
RU2340511C2 |
| ЭНЕРГОПОГЛОЩАЮЩЕЕ КРЕСЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2611326C1 |
Изобретение относится к органам управления для авиационной техники. Кабина содержит ручку 5 продольно-поперечного управления и ручку 29 общего шага, кинематически соединенные с размещенным под креслом 1 рычажным механизмом, который тягой 12 соединен с подвижным элементом 2 амортизатора кресла 1. Рычажный механизм имеет посредством рычага 32 и качалки 33 связь с педалями 36, 37 путевого управления, которые выполнены на параллелограммной подвеске. Технический результат - снижение вероятности травмы пилота при аварийном падении вертолета. 2 з.п.ф-лы, 2 ил.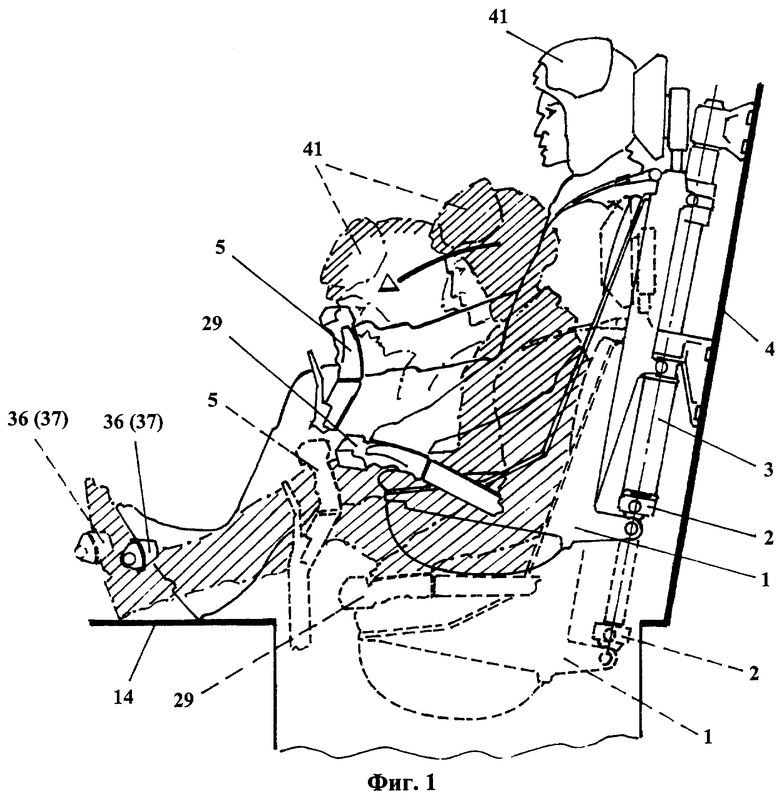
| US 4655416, 07.04.1987.SU 1816721, 23.05.1993.US 4085963, 26.11.1975 | |||
| US 5431361, 11.07.1995. |

