Изобретение относится к способам и системам управления летательными аппаратами (объектами) и может быть использовано на ракетах, использующих одновременно системы теленаведения и командного телеуправления.
Известны способ наведения телеориентированной в луче ракеты и ракетный комплекс для его осуществления [Патент РФ №2266509 от 09.06.04 г, МКИ7 F41G 7/24], в описании которого присутствует система теленаведения ракеты в оптическом луче. Способ теленаведения в луче включает создание на пункте управления пространственной структуры поля управления, связанной с координатами соответствующих точек пространства, образуемой поочередным сканированием в двух взаимно перпендикулярных направлениях диаграммы направленности модулированного электромагнитного излучения, при котором изменяют величину модулированного параметра электромагнитного излучения пропорционально углу сканирования относительно начала координат, совпадающих с центром поля управления, являющегося точкой прицеливания, а на ракете измеряют величину демодулированного параметра электромагнитного излучения по курсу и тангажу и определяют его координаты. В качестве модулированного параметра, изменяемого пропорционально углу сканирования, используют в известном способе временное расстояние между импульсами, т.е. время-импульсную модуляцию (ВИМ), что следует из описания патента (стр.4 и 5).
Известная система теленаведения ракеты в оптическом луче, которая реализует этот способ, содержит на пункте управления в каналах по курсу и тангажу последовательно соединенные шифратор пространственной структуры поля управления и логическую схему ИЛИ, выходы которой из каждого канала соединены соответственно с первым и вторым входами передатчика, а на ракете - приемник и блок выделения координат, при этом вход приемника связан с выходом передатчика электромагнитным излучением. Причем шифратор пространственной структуры поля управления в каждом канале представляет собой последовательно соединенные аппаратуру кодирования и схему задержки.
Поскольку в данном техническом решении на стартовом участке траектории полета требуется осуществлять ввод ракеты в зону луча автономной системой управления, например, за счет задержки включения начала выделения координат, то данное управление является комбинированным ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., с.40].
Физическая сущность способа теленаведения по оптическому лучу и системы, его реализующей, заключается в том, что плоские лазерные лучи сканируют в пространстве по курсу и тангажу перпендикулярно длинной стороне, создавая электромагнитное поле управления. Приемник в момент пересечения его сканирующим лучом принимает информацию, содержащуюся в нем. Информация содержит закодированную последовательность импульсов о положении проекции полоски данного луча в плоскости приема относительно центра поля управления, что соответствует координатам, например, ракеты в момент пересечения лучом ее приемника. При этом используют, например, ВИМ информацию с временным разделением каналов ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., с.248, рис.4.29], т.е. поочередное сканирование по курсу и тангажу.
Таким образом, в известном техническом решении каждая точка пространственной структуры поля управления содержит информацию о величине координат, причем, например, при развороте по углу крена носителя, на котором установлен пункт управления, соответственно поворачивается на тот же угол поле управления. При этом появляются ошибки, возникающие за счет скручивания систем координат ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., стр.36, 64], что ограничивает маневры носителя, а значит, и применение.
Задачей предлагаемой группы изобретений является повышение маневренности носителя при исключении ограничений применения за счет компенсации ошибок, возникающих в системе теленаведения в луче.
Поставленная задача решается за счет того, что в способе комбинированного управления ракетой в луче, включающем формирование системой теленаведения в луче на пункте управления пространственной структуры поля управления, связанной с координатами соответствующих точек пространства, образуемой поочередным сканированием в двух взаимно перпендикулярных направлениях диаграммы направленности модулированного электромагнитного излучения, при котором изменяют величину модулированного параметра электромагнитного излучения пропорционально углу сканирования относительно начала координат, совпадающих с центром поля управления, являющегося точкой прицеливания, а на ракете измеряют величину демодулированного параметра электромагнитного излучения по курсу и тангажу и определяют его координаты, дополнительно вводят командную систему телеуправления в луче, которой формируют на пункте управления поправочные команды по курсу и тангажу, модулируя дополнительный параметр электромагнитного излучения, а на ракете декодируют принимаемые поправочные команды, корректируют ими величины сигналов, соответствующих координатам ракеты по курсу и тангажу, и из скорректированных сигналов формируют командный сигнал управления.
Система комбинированного управления ракетой в луче, основанная на этом способе, содержит на пункте управления в каналах по курсу и тангажу последовательно соединенные шифратор пространственной структуры поля управления и логическую схему ИЛИ, выходы которой из каждого канала соединены соответственно с первым и вторым входами передатчика, а на ракете - приемник и блок выделения координат, при этом вход приемника связан с выходом передатчика электромагнитным излучением, она снабжена на пункте управления для каждого канала соответственно первым и вторым формирователями поправочных команд, а на ракете - декодером поправочных команд и блоком коррекции, при этом выходы формирователей поправочных команд по курсу и тангажу соединены со вторыми входами логических схем ИЛИ соответственно по курсу и тангажу, выход приемника соединен со входами блока выделения координат и декодера поправочных команд, первый и второй выходы которого соединены с первым и вторым входами блока коррекции, третий и четвертый входы которого соединены с выходами соответственно по курсу и тангажу блока выделения координат, при этом в каждом канале шифратор пространственной структуры поля управления электрически взаимосвязан с формирователем поправочных команд.
Заявленный способ комбинированного управления ракетой в луче реализуется следующим образом. Системой теленаведения в луче (первая система) создают на пункте управления пространственную структуру поля управления, связанную с координатами соответствующих точек пространства, которую образуют поочередным сканированием в двух взаимно перпендикулярных направлениях диаграммы направленности модулированного электромагнитного излучения. При этом на пункте управления изменяют пропорционально углу сканирования относительно начала координат, совпадающих с центром поля управления, являющегося точкой прицеливания, величину модулируемого параметра электромагнитного излучения, например как в прототипе изменяют временное положение импульсов относительно опорных, используя ВИМ.
На ракете измеряют величину демодулированного параметра электромагнитного излучения по курсу и тангажу, т.е. в соответствии с признаком принадлежности по курсу Z и тангажу Y временное расстояние между импульсами преобразуют в соответствующие сигналы, определяя тем самым положение ракеты относительно "0" декартовой системы координат Z0Y, что соответствует координатам его нахождения (система теленаведения). Причем в центре поля управления величина измеряемых координат равна нулю, так как она совпадает с точкой прицеливания, а на противоположных краях относительно центра поля управления - максимальная, но с разными знаками.
Дополнительно командной системой телеуправления в луче (вторая система) на пункте управления формируют поправочные команды по курсу и тангажу, модулируя дополнительный параметр электромагнитного излучения. Для этого вводят третий импульс, например, после первого и второго импульсов, используемых в прототипе. При этом расстояние по времени между, например, первым и вторым импульсами - признак принадлежности каналу тангажа либо курса, между вторыми импульсами - величина координаты, а между вторым и третьим - величина поправочной команды. Величинами поправочных команд по курсу и тангажу корректируют сигналы системы теленаведения в луче, которые требуется изменять.
Декодируют на ракете принимаемые поправочные команды и корректируют ими величины сигналов, соответствующих координатам ракеты по курсу и тангажу, а из корректированных сигналов формируют командный сигнал управления.
Формируют поправочные (корректирующие) команды по курсу и тангажу, компенсирующие перекрестные связи при крене носителя аналогично, как и при крене ракеты (например, не вращающейся по углу крена в полете), где "часто применяют синусно-косинусные потенциометры, решающие уравнения вида (1.5.13) и корректирующие команды в соответствии с измеряемыми на борту значениями γкр" ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., с.64-65]. Данный способ и устройства, его реализующие, можно, например, использовать при изменении угла крена носителя, на котором расположен пункт управления, при этом измеряют и формируют величину сигнала крена на носителе.
Кроме того, поскольку в процессе полета на ракете выгорает топливо, то в ряде случаях требуется на пункте управления дополнительно формировать поправочную команду, изменяемую во времени в канале тангажа, компенсирующую величину изменяющегося веса объекта и т.д. При этом все эти команды поканально суммируют.
Предлагаемое изобретение поясняется чертежом, на котором представлена структурная электрическая схема системы комбинированного управления ракетой в луче, где: 1 - пункт управления (ПУ); 2 и 3 - каналы курса и тангажа соответственно (КК и ТК); 4а и 4б - шифратор пространственной структуры поля управления по курсу и тангажу соответственно (ШПС1 и ШПС2); 5а и 5б - формирователь поправочных команд по курсу и тангажу соответственно (ФПК1 и ФПК2); 6а и 6б - логическая схема ИЛИ по курсу и тангажу соответственно (ЛС1 и ЛС2); 7 - передатчик (П); 8 - ракета (Р); 9 - приемник (ПР); 10 - декодер поправочных команд (ДПК); 11 - блок выделения координат (БВК); 12 - блок коррекции (БК).
В системе комбинированного управления ракетой в луче на пункте управления 1 в курсовом канале 2 последовательно соединены первый шифратор пространственной структуры поля управления 4а и первая логическая схема ИЛИ 6а, а в тангажном канале 3 - второй шифратор пространственной структуры поля управления 4б и вторая логическая схема ИЛИ 6б. Выходы первой 6а и второй 6б логических схем ИЛИ соединены соответственно с первым и вторым входами передатчика 7. На ракете 8 последовательно соединены приемник 9 и блок выделения координат 11, при этом вход приемника 9 связан с выходом передатчика 7 электромагнитным излучением. Выходы формирователей поправочных команд по курсу 5а и тангажу 5б соединены со вторыми входами логических схем соответственно в курсовом 6а и тангажном 6б каналах. Выход приемника 9 соединен со входом декодера поправочных команд 10, первый и второй выходы которого соединены с первым и вторым входами блока коррекции 12. Третий и четвертый входы блока коррекции 12 соединены со входами по курсу и тангажу блока выделения координат 11. В каждом канале курс (тангаж) шифратор пространственной структуры поля управления 4а (4б) электрически взаимосвязан с формирователем поправочных команд 5а (5б).
Шифраторы пространственной структуры поля управления по курсу 4а и тангажу 4б выполнены, как в прототипе [Патент РФ № 2266509 от 09.06.04 г, МКИ7 F41G 7/24], и представляют собой последовательно соединенные аппаратуру кодирования и схему задержки. Передатчик 7, приемник 9 и блок выделения координат 10 выполнены, например, как в прототипе. Первый (в канале курса) 5а и второй (в канале тангажа) 5б формирователи поправочных команд можно выполнить как преобразователь напряжение - временной интервал ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., с.239, рис.4.22], где величина напряжения соответствует величине поправочной команды с учетом изложенного на с.6 данного описания. Декодер поправочных команд 10 можно выполнить как дешифратор ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., с.250, рис.4.30]. Блок коррекции 12 можно выполнить в каждом канале соответственно по курсу и тангажу, например, в виде двух аналогичных сумматоров.
Система комбинированного управления ракетой в луче (см. чертеж), реализующая способ комбинированного управления в луче, работает следующим образом. При пуске ракеты начинает работать пункт управления 1, при этом шифраторы пространственной структуры поля управления по курсу 4а и тангажу 4б формируют, например, пары импульсов, временное расстояние между которыми постоянное, но для каждого канала разное, так как является признаком принадлежности этой пары импульсов курсовому или тангажному каналам. Период повторения пары импульсов соответствует величине координат по курсу и тангажу.
Таким образом, передатчик 7, на вход которого поступают пары импульсов через логическую схему ИЛИ соответственно по курсу 6а и тангажу 6б, преобразует их, например, в оптическое излучение и поочередно сканирует его соответственно по курсу и тангажу, формируя оптическое поле управления, в котором телеориентируется ракета 8.
На пункте управления 1 формируют также дополнительные (поправочные) команды в формирователях поправочных команд по курсу 5а и тангажу 5б. Для этого, например, с выходов шифраторов пространственной структуры поля управления по курсу 4а и тангажу 4б (на которых присутствуют вторые или первые из пар импульсы) импульсы поступают на входы формирователей поправочных команд соответственно по курсу 5а и тангажу 5б. На выходе формирователя поправочных команд 5а формируется третий импульс, отстоящий по времени от второго на величину, соответствующую величине поправочной команды по курсу. На выходе формирователя поправочных команд 5б аналогично формируется поправочная команда по тангажу.
При формировании поправочной команды в каждом из двух каналов приведенная выше электрическая связь между блоками 4 и 5 может иметь и другое направление, т.е. с выхода формирователя поправочных команд на вход шифратора пространственной структуры поля управления. При этом пары импульсов, формирующих поле управления, будут соответственно вторым и третьим импульсами, а импульс поправочной команды - первым. В связи с изложенным электрическая связь между блоками 4а и 5а, а также 4б и 5б изображена на фиг.1 условно двунаправленной. Импульсный сигнал с выходов формирователей поправочных команд по курсу 5а и тангажу 5б поступает на вторые входы соответственно первой 6а и второй 6б логических схем ИЛИ.
Таким образом, передатчик 7 будет дополнительно излучать импульсы, несущие величины поправочных команд по курсу и тангажу, которые будут находиться в каждой точке поля управления.
Ракета 8, находясь в поле управления сформированным пунктом управления 1, с помощью приемника 9 преобразует оптическое (электромагнитное) излучение в электрический сигнал, т.е. в последовательность импульсов, соответствующую моменту времени облучения приемника сканируемым излучением. Эта последовательность импульсов содержит тройку импульсов, повторяющуюся с изменяемым периодом. Причем величина информации заложена как в расстоянии между соответствующими импульсами, так и в периоде повторения троек импульсов.
Сигнал с выхода приемника 9 поступает на вход блока выделения координат 11, где он разделяется по признаку принадлежности на курсовой Z и тангажный Y, а затем преобразуется (декодируется) длительность временного интервала между импульсами, соответствующая месту нахождения ракеты в поле управления, в величину координат, соответствующую величинам двух сигналов. С выхода приемника 9 сигнал поступает также на вход декодера поправочных команд 10, где он декодируется с учетом признака принадлежности на курсовую поправочную команду и тангажную.
Сигнал с первого и второго выходов декодера поправочных команд 10 поступает соответственно на первый и второй входы блока коррекции 12, на третий и четвертый входы которого поступают сигналы с выходов соответственно по курсу и тангажу блока выделения координат 11. На выходе блока коррекции 12 формируется сигнал по курсу и тангажу, скорректированный, например, только по углу крена носителя ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., с.65, рис.1.39]. Этот скорректированный сигнал поступает далее на автопилот (не показан), который с помощью рулевого привода отрабатывает сформированные на нем команды и совмещает направление траектории полета ракеты с целью.
Таким образом, предлагаемая группа изобретений повышает маневренность носителя, на котором установлен пункт управления при исключении ограничений применения, а значит, и живучесть системы управления и точность наведения объекта управления за счет непрерывной коррекции формируемых на объекте команд наведения.
Предложен способ комбинированного управления в луче. На пункте управления создают пространственную структуру поля управления поочередным сканированием в двух взаимно перпендикулярных направлениях диаграммы направленности модулированного электромагнитного излучения. На ракете измеряют величину информационного параметра электромагнитного излучения по курсу и тангажу и определяют ее координаты. Дополнительно вводят командную систему телеуправления в луче, которой формируют на пункте управления поправочные команды по курсу и тангажу. На ракете декодируют принимаемые поправочные команды и корректируют ими величины сигналов, соответствующих координатам ракеты по курсу и тангажу. Техническими результатами являются повышение маневренности ракеты и ее живучести, а также повышение точности наведения. 2 н.п. ф-лы, 1 ил.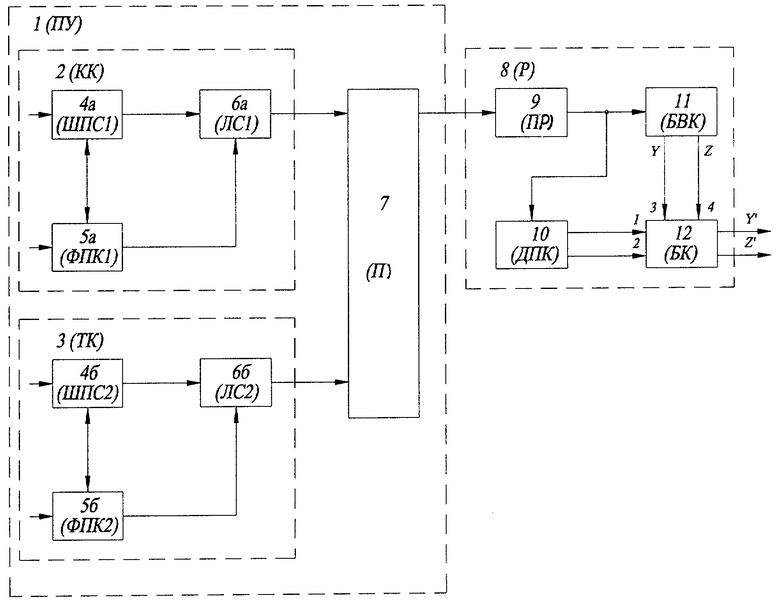
1. Способ комбинированного управления ракетой в луче, включающий формирование системой теленаведения в луче на пункте управления пространственной структуры поля управления, связанной с координатами соответствующих точек пространства, образуемой поочередным сканированием в двух взаимно перпендикулярных направлениях диаграммы направленности модулированного электромагнитного излучения, при котором изменяют величину модулированного параметра электромагнитного излучения пропорционально углу сканирования относительно начала координат, совпадающих с центром поля управления, являющегося точкой прицеливания, а на ракете измеряют величину демодулированного параметра электромагнитного излучения по курсу и тангажу и определяют его координаты, отличающийся тем, что дополнительно вводят командную систему телеуправления в луче, которой формируют на пункте управления поправочные команды по курсу и тангажу, модулируя дополнительный параметр электромагнитного излучения, а на ракете декодируют принимаемые поправочные команды, корректируют ими величины сигналов, соответствующих координатам ракеты по курсу и тангажу, и из скорректированных сигналов формируют командный сигнал управления.
2. Система комбинированного управления ракетой в луче, содержащая на пункте управления в каналах по курсу и тангажу последовательно соединенные шифратор пространственной структуры поля управления и логическую схему "или", выходы которой из каждого каналов соединены соответственно с первым и вторым входами передающего устройства, а на ракете - приемник и блок выделения координат, при этом вход приемника связан с выходом передающего устройства электромагнитным излучением, отличающаяся тем, что она снабжена на пункте управления для каждого канала соответственно первым и вторым формирователями поправочных команд, а на ракете - декодером поправочных команд и блоком коррекции, при этом выходы формирователей поправочных команд по курсу и тангажу соединены со вторыми входами логических схем "или" соответственно по курсу и тангажу, выход приемника соединен с входами блока выделения координат и декодера поправочных команд, первый и второй выходы которого соединены с первым и вторым входами блока коррекции, третий и четвертый входы которого соединены с выходами соответственно по курсу и тангажу блока выделения координат, при этом в каждом канале шифратор пространственной структуры поля управления электрически взаимосвязан с формирователем поправочных команд.
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
| US 2006049300 А1, 09.03.2006 | |||
| FR 2881821 А1, 11.08.2006 | |||
| US 6357694 B1, 19.03.2002. | |||

