Изобретение относится к области вооружения, а именно к ракетной технике и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы теленаведения.
В системах теленаведения по лучу формируют пространственную структуру электромагнитного поля, создаваемую передающим устройством с пункта управления, при этом параметры поля управления функционально связаны с координатами соответствующих точек, например в системе декартовых координат ZOY, где Z - величина координаты по курсу, Y - величина координаты по тангажу, 0 - начало координат, совпадающее с центром поля управления и являющееся точкой прицеливания (наведения). Формирование поля управления осуществляют, например, сканированием диаграммы направленности в двух взаимно перпендикулярных направлениях по Z и Y соответственно, при этом пропорционально углу сканирования изменяют величину команд. Таким образом, в плоскости ZOY поле имеет по краям единичные (с разными знаками соответственно) значения команд, а в центре - нулевое. Бортовая аппаратура, расположенная на ракете, измеряет параметры электромагнитного поля, изменяемые по закону время-импульсной (ВИМ), или кодово-импульсной (КИМ), или широтно-импульсной модуляции (ШИМ) и т.д., а затем определяет свое положение относительно 0, при этом на ракете вырабатывают команды управления таким образом, чтобы заставить ее занять определенное положение относительно заданного электромагнитного поля.
Известны способ управления ракетой и система наведения ракеты для его реализации [1]. Способ управления ракетой заключается в том, что в системе теленаведения по лучу преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, из которых формируют команды управления ракетой.
Система наведения ракеты [1] содержит аппаратуру пункта управления, связанную с расположенной на ракете бортовой аппаратурой управления, выход которой подключен к автопилоту. В бортовую аппаратуру управления ракетой входят канал ошибки, опорный канал, блок поправки на угол крена и преобразователь координат, которые в целом выполняют функцию выделения координат по курсу UКz и тангажу UКу. Кроме того, в нее входят блок поправки на скорость и устройство формирования команд, которые можно отнести функционально к входной части автопилота, поскольку они выполняют функцию формирования командного сигнала [1].
На участке выведения ракеты на траекторию особенно актуальным является обеспечение ввода ракеты в зону луча [1]. При этом необходимо, чтобы ввод ракеты произошел при заданных начальных условиях и по истечении определенного времени с момента старта. Начальные условия определяются ошибками прицеливания: линейным отклонением снаряда от центра поля управления в момент перехода к теленаведению, а также скоростью и ускорением, характеризующими движение ракеты по отношению к лучу в этот момент времени. Вследствие этого возникает переходный процесс, длительность которого определяет минимально допустимую дальность наведения.
В процессе полета ракеты к цели помимо команд управления на ракету воздействует возмущение, обусловленное собственной массой ракеты, при этом в полете изменяются как масса ракеты (из-за выгорания топлива), так и ее скорость. Это приводит к провисанию ракеты относительно центра поля управления (0). Увеличение крутизны пеленгационной характеристики (зависимости величины напряжения UКу от величины отклонения ракеты от 0 по тангажу) для компенсации этого возмущения не представляется возможным, т.к. при этом ухудшаются динамические характеристики контура наведения, что может привести к выходу (выбросу) ракеты из луча (поля управления).
Таким образом, недостатком известного способа управления ракетой и системы наведения ракеты, его реализующей, являются длительный переходный процесс при введении ракеты в луч, увеличивающий минимально допустимую дальность наведения, и низкая точность наведения ракеты на цель за счет ошибки наведения в канале тангажа.
Задачей настоящего изобретения является повышение точности введения ракеты в луч и наведения ее на цель.
Поставленная задача решается в способе управления ракетой за счет того, что преобразуют электромагнитное излучение с пункта управления в координаты ракеты по курсу и тангажу и формируют из курсовой координаты команду управления по курсу, при котором на ракете измеряют температуру, преобразуют температуру в код, которым формируют поправочную команду, суммируют эту команду с величиной координаты по тангажу, а из полученного значения вырабатывают команду управления ракетой по тангажу.
Система наведения ракеты, основанная на этом способе, содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, при этом аппаратура пункта управления связана со входом приемника, введены сумматор, датчик температуры, преобразователь температура - код и формирователь поправочной команды, при этом выход датчика температуры соединен со входом преобразователя температура - код, N выходов которого подключены к N входам формирователя поправочной команды, выход которого соединен с первым входом сумматора, второй вход которого подключен к выходу блока выделения координат по тангажу, а выход сумматора соединен со вторым входом автопилота, где N=1, 2, 3...
В предлагаемом изобретении за счет формирования на борту ракеты поправочной команды управления в канале тангажа учитывают изменение скорости полета ракеты, определяемой скоростью горения топлива, зависящей от его температуры, а значит, и от температуры на борту ракеты.
Заявленный способ реализуется следующим образом. На борту ракеты с момента запитки бортовой аппаратуры от бортового источника питания и, например, до конца полета измеряют температуру датчиком, расположенным, например, в самой бортовой аппаратуре. Преобразуют температуру в код (цифровой), которым формируют поправочную команду по тангажу.
Электромагнитное излучение с пункта управления (в месте нахождения ракеты) преобразуют в электрические сигналы координат ракеты по курсу и тангажу (до момента ввода ракеты в луч они равны нулю). Для управления ракетой по курсу из сигнала курсовой координаты в автопилоте формируют команду управления, а для управления ракетой по тангажу вырабатывают команду из суммарных сигналов тангажной координаты и поправочной команды. При этом величина поправочной команды компенсирует провисание ракеты на траектории полета, а при вводе ракеты в луч она оптимизирует начальные условия ввода.
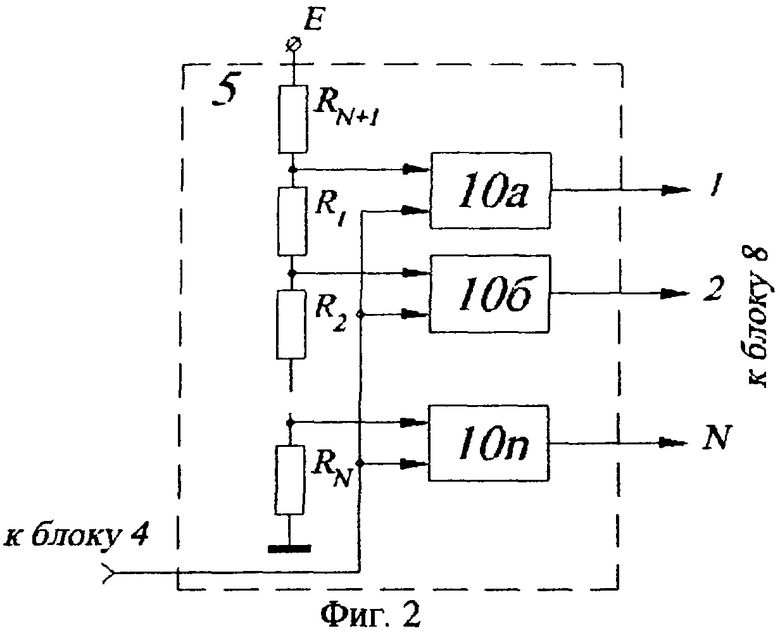
Предлагаемое изобретение поясняется чертежами (фиг.1, 2, 3). На фиг.1 представлена структурная электрическая схема системы наведения ракеты, где 1 - аппаратура пункта управления, 2 - ракета, 3 - приемник, 4 - датчик температуры, 5 - преобразователь температура - код, 6 - блок выделения координат, 7 - сумматор, 8 - формирователь поправочной команды, 9 - автопилот.
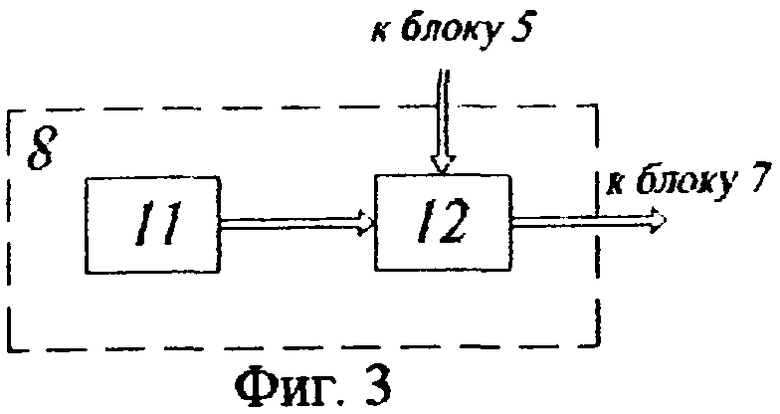
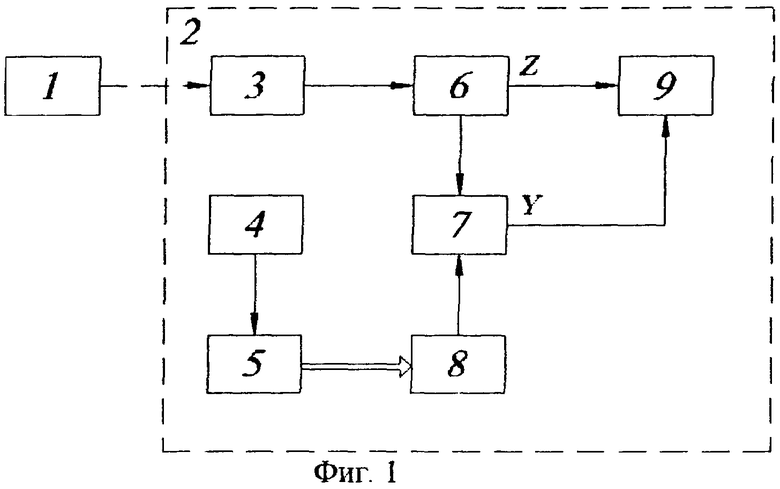
На фиг.2 и 3 представлены электрические схемы преобразователя температура - код 5 и формирователя поправочной команды 8 (примеры их выполнения), где 10а... 10n - N компараторов, 11 - таймер, 12 - программно-запоминающее устройство, R1...RN+1 - резисторы, Е - бортовой источник питания.
На ракете 2 последовательно включены приемник 3 и блок выделения координат 6, выход по курсу которого соединен с первым выходом автопилота 9. Аппаратура пункта управления 1 связана со входом приемника 3. Выход датчика температуры 4 соединен со входом преобразователя температура - код 5, N выходов которого подключены к N входам формирователя поправочной команды 8, выход которого соединен с первым входом сумматора 7, второй вход которого подключен к выходу блока выделения координат по тангажу 6. Выход сумматора 7 соединен со вторым входом автопилота 9.
Аппаратура пункта управления 1 может быть выполнена как в известной системе наведения при сканировании диаграммы направленности, например, поочередно в двух взаимно перпендикулярных направлениях (по курсу и тангажу). Приемник 3 и блок выделения координат 6 могут быть выполнены по схеме приемного тракта, например, с время-импульсной модуляцией (ВИМ) при оптической линии связи или с дополнительной амплитудной модуляцией (ВИМ-АМ) при радиолинии [1].
Соответственно с данным видом модуляции должна быть выполнена и аппаратура пункта управления 1.
Датчик температуры 4 может быть выполнен, например, как терморезистор. Пример выполнения преобразователя температура - код 5 приведен на фиг.2, где компараторы 10a... 10n - обычные аналоговые компараторы, например микросхемы 521СА3. Пример выполнения формирователя поправочной команды 8 приведен на фиг.3, где таймер 11 представляет собой последовательно включенные автогенератор импульсного сигнала со стабилизированной (кварцевым резонатором) частотой и двоично-десятичный счетчик импульсов, обнуляемый импульсным сигналом, осуществляющим запуск двигательной установки. Программно-запоминающее устройство 12, например микросхема 556РТ7, причем цифровые сигналы с блоков 11 и 5 подают на адреса строк и адреса столбцов соответственно этой микросхемы. Выходной сигнал с программно-запоминающего устройства 12, например, через цифроаналоговое устройство и через сумматор 7 подается на вход автопилота 9. Возможно выполнение формирователя поправочной команды 8 иначе, например на мультиплексоре (микросхема 564КП2), входы управления которой (А0, А1 и А2) подключены к соответствующим разрядам таймера 11, а коммутируемые входы X1, Х2,... , Х8 - к выходам делителя напряжения R1...RN+1, приведенного на фиг.2 при N=8.
Автопилот 9 можно выполнить как автопилот для ракеты, стабилизированной по углу крена [1], либо как автопилот для ракеты, вращающейся по углу крена [2].
Заявленная система наведения ракеты работает следующим образом. До момента старта ракеты 2 (после выхода бортового источника питания на рабочий режим) датчик температуры 4 измеряет температуру, при этом на его выходе формируется напряжение, величина которого, например, прямо пропорциональна величине температуры. Это напряжение поступает на вход преобразователя температура - код 5. На выходах преобразователя температура - код 5 (фиг.2) формируется двоичное число, при этом, чем больше величина напряжения, тем больше двоичное число, формируемое компараторами 10а... 10n, пороги срабатывания которых задают резисторы R1...RN+1, запитываемые от бортового источника питания Е.
Двоичное число с преобразователя температура - код 5 поступает на формирователь поправочной команды 8, на выходе которого формируется поправочная команда, величину которой задает величина температуры и которая, например, изменяется во времени с момента старта ракеты.
Величина поправочной команды с выхода формирователя поправочной команды 8 суммируется на сумматоре 7 с величиной координаты с выхода блока выделения координат 6 по тангажу Y, величина которой до момента ввода ракеты 2 в луч равна нулю.
Аппаратура пункта управления 1, расположенная, например, на земле, формирует поле управления, например, по закону ВИМ, при этом при изменении направления сканирования с Z на Y меняют рабочие сигналы с РС1 на РС2 [1]. При вводе ракеты 2 в луч приемник 3 преобразует электромагнитное излучение в электрические импульсы, которые поступают на вход блока выделения координат 6. Этот блок выделяет по курсу Y и тангажу Y координаты ракеты, при этом по каналу курса Z сигнал поступает на первый вход автопилота 9. На второй вход автопилота 9 по каналу тангажа Y поступает суммарная команда с выхода сумматора 7. Автопилот 9 формирует команды управления ракетой по курсу и тангажу.
Таким образом, сигнал на выходе сумматора 7 содержит величину координаты по тангажу Y и поправочную команду, величина которой определяется, в том числе, датчиком температуры 4.
Следовательно, в способе управления ракетой за счет того, что на ракете измеряют температуру, преобразуют температуру в код, которым формируют поправочную команду, суммируют эту команду с величиной координаты по тангажу, из которой вырабатывают команду управления ракетой по тангажу, повышена точность введения ракеты в луч и наведения ее на цель.
Введение в систему наведения ракеты сумматора, датчика температуры, преобразователя температура - код и формирователя поправочной команды, при этом выход датчика температуры соединен со входом преобразователя температура - код, N выходов которого подключены к N входам формирователя поправочной команды, выход которого соединен с первым входом сумматора, второй вход которого подключен к выходу блока выделения координат по тангажу, а выход сумматора соединен со вторым входом автопилота, повысило точность введения ракеты в луч и наведение ее на цель по тангажу.
Источники информации
1. Основы радиоуправления/Под ред. В.А. Вейцеля и В.Н. Типугина, - М.: Советское радио, 1973, стр.276-277, рис.5.3, стр. 49, рис.1.27, стр.247, рис.4.28.
2. В.А. Павлов, С.А. Понырко, Ю.М. Хованский. Стабилизация летательных аппаратов и автопилоты. - М.: Высшая школа, 1964, стр.209, рис.6.11.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2005 |
|
RU2289086C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| СПОСОБ ТЕЛЕНАВЕДЕНИЯ РАКЕТЫ ПО ЛУЧУ И СИСТЕМА ТЕЛЕНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258888C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2295691C1 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы теленаведения. Задачей изобретения является повышение точности введения ракеты в луч и наведения ее на цель за счет формирования на борту ракеты поправочной команды управления в канале тангажа, учитывающей изменение скорости полета ракеты, определяемой скоростью горения топлива, зависящей от его температуры, а значит, и от температуры на борту ракеты. Предложен способ управления ракетой, при котором преобразуют электромагнитное излучение с пункта управления в координаты ракеты по курсу и тангажу и формируют из курсовой координаты команду управления по курсу, а на ракете измеряют температуру, преобразуют температуру в код, которым формируют поправочную команду, суммируют эту команду с величиной координаты по тангажу, а из полученного значения вырабатывают команду управления ракетой по тангажу. Описана система наведения ракеты, основанная на этом способе, содержащая аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, при этом аппаратура пункта управления связана со входом приемника, введены сумматор, датчик температуры, преобразователь температура - код и формирователь поправочной команды. 2 с.п. ф-лы, 3 ил.
| Основы радиоуправления | |||
| / Под ред | |||
| В.А | |||
| ВЕЙЦЕЛЯ, В.Н | |||
| ТИПУГИНА | |||
| - М.: Советское радио, 1973, с.276 и 277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

