Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловой координаты объектов.
Известен способ измерения угловой координаты объекта в процессе обзора пространства радиолокационной станцией (РЛС), включающий излучение зондирующих сигналов, прием отраженных от объекта сигналов, измерение их параметров, обнаружение в принятых сигналах пачек импульсов, вычисление угловой координаты объекта (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, стр.109).
Известна радиолокационная станция, реализующая указанный способ измерения координаты объекта (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. - М.: Военное издательство Министерства обороны СССР, 1968, стр.110, рис.4.23).
Известная радиолокационная станция содержит последовательно соединенные антенну, радиоприемное устройство, устройство обнаружения сигнала, включающее пороговое устройство, вычислитель, а также датчик текущей угловой координаты, вход которого соединен с координатным выходом антенны, а выход - со входом вычислителя.
В известном способе измерения угловой координаты объекта и устройстве, реализующем данный способ, за угловую координату объекта θ берут среднее арифметическое двух отсчетов - начала (θн) и конца (θк) пачки импульсов сигналов по измеряемой координате:

Недостатком известных способа и устройства является низкая точность измерения угловой координаты. Это связано с тем, что в них не учитывается неравномерность уровней сигналов в пачке импульсов принятых сигналов.
Наиболее близким способом измерения угловой координаты объекта к предлагаемым первому и второму вариантам является патент на изобретение РФ №2235342, МПК G01S 13/06 от 2004.08.27, который включает излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов и угловых координат луча, соответствующих принятым сигналам, формирование пачек импульсов принятых сигналов, определение мощности сигнала, соответствующего расположению объекта на направлении максимума луча, вычисление угловой координаты объекта по формуле:

где θ - угловая координата объекта;
L11 - величина, определяемая при k=1, m=1 из формулы
 , k=0, 1, 2, 3; m=0, 1;
, k=0, 1, 2, 3; m=0, 1;
n - количество положений луча в угловом пакете принятых сигналов по измеряемой угловой координате объекта θ,
θi - угловая координата луча, соответствующего i-му сигналу пакета принятых сигналов, определяемая из формулы θi=θл+(i-1)Δθ;
θл - угловая координата луча, соответствующего первому (i=1) сигналу пакета принятых сигналов;
Δθ - шаг перемещения луча по измеряемой угловой координате;
 ;
;
ρ2 1 - мощность i-го сигнала пакета, нормированная к среднеквадратическому значению шумов приемного тракта;
 ;
;
 - отношение сигнал/шум для сигнала, соответствующего расположению объекта на направлении максимума луча;
- отношение сигнал/шум для сигнала, соответствующего расположению объекта на направлении максимума луча;
 ;
;

 ;
;
 ;
;


sign (q) - знак q;


Наиболее близкой к заявляемой является РЛС реализующая известный способ (Патент РФ №2235342), которая содержит передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловых координат соответственно, при этом блок оценки угловых координат включает запоминающее устройство обнаруженных сигналов, блок обнаружения пачек импульсов принятых сигналов и вычислитель, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловых координат соответственно, М выходов запоминающего устройства обнаруженных сигналов соединены с М входами блока обнаружения пачек импульсов принятых сигналов, выходы которого соединены со входами блока определения мощности сигнала, соответствующего расположению объекта на направлении максимума луча. Выходы этого блока соединены со входами вычислителя, выход вычислителя является выходом блока оценки угловых координат.
Недостатками наиболее близких способа и устройства являются небольшая скорость при оценке угловых координат и снижение точности оценки углового положения объекта из-за отклонения положения максимального импульса от истинного направления на объект.
Заявляемое изобретение направлено на устранение указанных недостатков.
Решаемой задачей (техническим результатом) является повышение быстродействия при оценке угловой координаты и повышение точности оценки угловой координаты объекта.
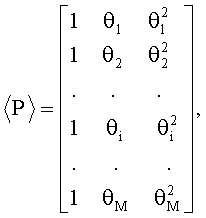
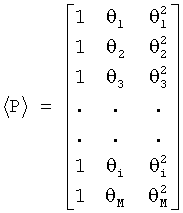
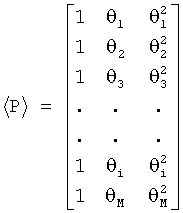
Указанный технический результат в первом способе измерения угловой координаты объекта, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов Аi и угловых координат θi луча, соответствующих принятым сигналам, обнаружение пачек импульсов принятых сигналов {Аi, θi} i=1..M, где М - число импульсов пачки, определение угловой координаты объекта, достигается тем, что определение угловой координаты объекта осуществляют путем обработки обнаруженных пачек импульсов принятых сигналов, следующим образом: из значений угловых координат {θi} луча формируют матрицу  из элементов
из элементов  , имеющую М строк и три столбца (нулевой, первый и второй), следующей структуры:
, имеющую М строк и три столбца (нулевой, первый и второй), следующей структуры:
определяют вектор  , образованный тремя коэффициентами a0, a1, a2 параболической аппроксимации огибающей пачки импульсов принятых сигналов
, образованный тремя коэффициентами a0, a1, a2 параболической аппроксимации огибающей пачки импульсов принятых сигналов  , как решение трех уравнений:
, как решение трех уравнений:
 ,
,
где  ,
,  ,
,  - транспонированная матрица
- транспонированная матрица  ,
,
 - М-мерный вектор амплитуд сигналов пачки,
- М-мерный вектор амплитуд сигналов пачки,
после чего определение угловой координаты объекта осуществляют в соответствии с формулой:
где  - измеренная угловая координата объекта.
- измеренная угловая координата объекта.
В соответствии с правилами матричной алгебры матрица является квадратной матрицей третьего порядка с элементами  {k=0, 1, 2; j=0, 1, 2), где
{k=0, 1, 2; j=0, 1, 2), где  - элементы матрицы ; а вектор
- элементы матрицы ; а вектор  образован элементами
образован элементами  (k=0, 1, 2).
(k=0, 1, 2).
Указанный технический результат во втором способе измерения угловой координаты объекта, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов Аi и угловых координат θi луча, соответствующих принятым сигналам, обнаружение пачек импульсов принятых сигналов {Аi, θi} i=1..M, где М - число импульсов пачки, определение угловой координаты объекта, достигается тем, что определение угловой координаты объекта осуществляют путем обработки обнаруженных пачек импульсов принятых сигналов, следующим образом: из значений угловых координат {θi} луча формируют матрицу из элементов  (k=0, 1, 2), имеющую М строк и три столбца (нулевой, первый и второй), следующей структуры:
(k=0, 1, 2), имеющую М строк и три столбца (нулевой, первый и второй), следующей структуры:

определяют  и
и  - значения определителей, получаемых из матрицы
- значения определителей, получаемых из матрицы  с элементами
с элементами  (k=0, 1, 2; j=0, 1, 2) путем замены первого столбца (с индексом j=1) и второго (с индексом j=2) соответственно на вектор
(k=0, 1, 2; j=0, 1, 2) путем замены первого столбца (с индексом j=1) и второго (с индексом j=2) соответственно на вектор  ,
,
где  - транспонированная матрица ;
- транспонированная матрица ;
- М-мерный вектор амплитуд сигналов пачки;
А1, А2, …Аi, …АM - амплитуды сигналов пачки;
после чего определение угловой координаты объекта осуществляют в соответствии с формулой:
где  - измеренная угловая координата объекта.
- измеренная угловая координата объекта.
Технический результат в РЛС для измерения угловой координаты объекта, содержащей передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловой координаты, при этом выход передатчика соединен с входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен с входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловой координаты, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловой координаты соответственно, при этом блок оценки угловой координаты включает запоминающее устройство обнаруженных сигналов, блок обнаружения пачек импульсов с М входами и вычислитель угловой координаты с двумя входами, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловой координаты соответственно, М выходов запоминающего устройства обнаруженных сигналов соединены с М входами блока обнаружения пачек импульсов соответственно, выход вычислителя угловой координаты является выходом блока оценки угловой координаты, достигается тем, что в блок оценки угловой координаты дополнительно введен вычислитель коэффициентов параболической огибающей пачек импульсов, два выхода которого соединены с двумя входами вычислителя угловой координаты соответственно, М выходов блока обнаружения пачек импульсов соединены с М входами вычислителя коэффициентов параболической огибающей пачек импульсов соответственно, а вычислитель коэффициентов параболической огибающей пачек импульсов содержит формирователь матрицы , имеющей М строк и три столбца следующей структуры

где {θi} - угловые координаты импульсов пачки (i=1..М), вычислитель матрицы  , где , где
, где , где  - транспонированная матрица
- транспонированная матрица  , вычислитель вектора
, вычислитель вектора  где
где  , где
, где  - М-мерный вектор амплитуд сигналов пачки, и вычислитель коэффициентов, причем М входов вычислителя коэффициентов параболической огибающей пачек импульсов являются М входами формирователя матрицы и вычислителя вектора
- М-мерный вектор амплитуд сигналов пачки, и вычислитель коэффициентов, причем М входов вычислителя коэффициентов параболической огибающей пачек импульсов являются М входами формирователя матрицы и вычислителя вектора  соответственно, выход формирователя матрицы является входом вычислителя матрицы и входом вычислителя вектора , выходы вычислителя вектора и вычислителя матрицы (L) являются входами вычислителя коэффициентов соответственно, два выхода вычислителя коэффициентов являются выходами вычислителя коэффициентов параболической огибающей пачек импульсов соответственно.
соответственно, выход формирователя матрицы является входом вычислителя матрицы и входом вычислителя вектора , выходы вычислителя вектора и вычислителя матрицы (L) являются входами вычислителя коэффициентов соответственно, два выхода вычислителя коэффициентов являются выходами вычислителя коэффициентов параболической огибающей пачек импульсов соответственно.
Изобретение иллюстрируется следующими чертежами.
[И далее по тексту стр.8-14 описание изобретения]
На фиг.1 представлена блок-схема РЛС, с помощью которой осуществляется реальный способ угловых координат по первому и второму вариантам.
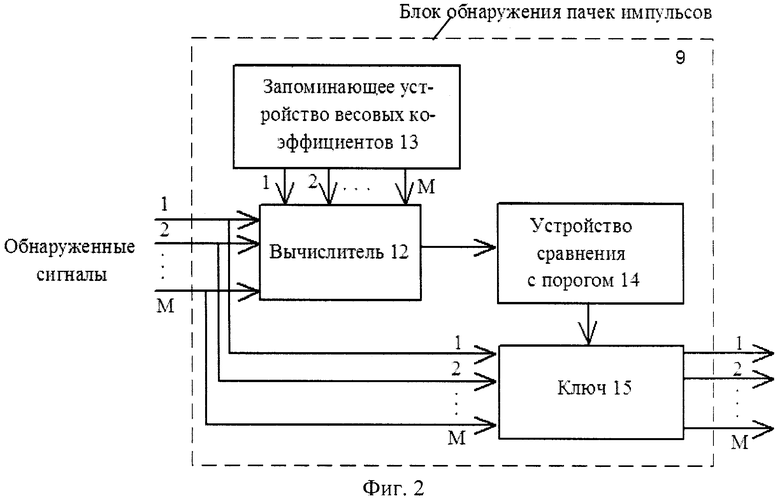
На фиг.2 - блок обнаружения пачек импульсов.
На фиг.3 представлен вычислитель коэффициентов параболической огибающей пачек импульсов.
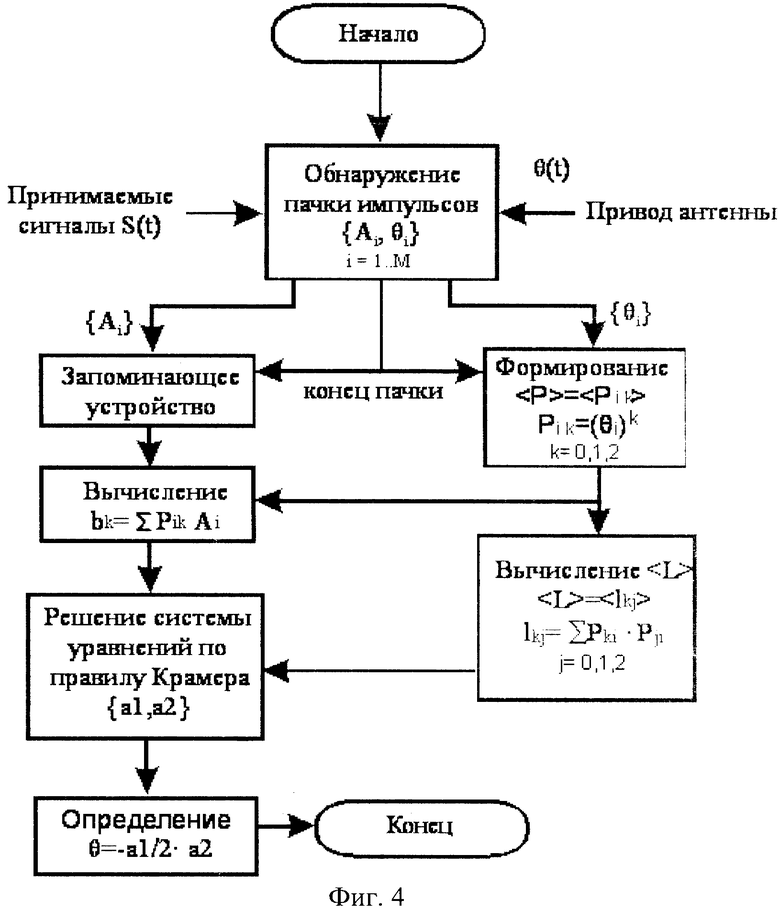
На фиг.4 представлен алгоритм вычисления угловой координаты объекта.
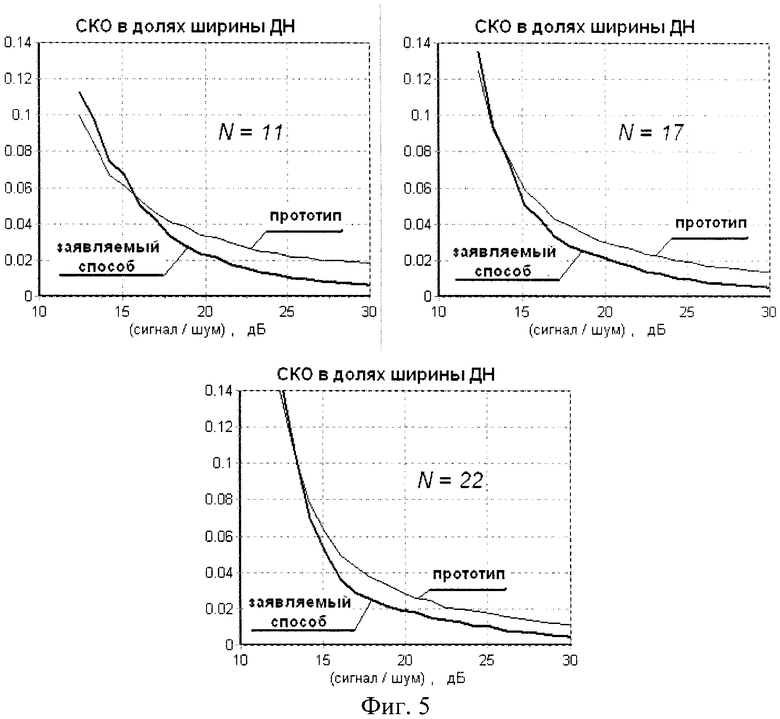
На фиг.5 представлены результаты статического моделирования точности сопоставляемых способов.
Заявленные способы измерения угловой координаты объекта реализуются с помощью радиолокационной станции, которая содержит (фиг.1) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок угловой координаты 7, при этом выход передатчика 1 соединен с входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен с входом приемника 4, выход которого соединен с входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловой координаты 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловой координаты 7 соответственно, при этом блок оценки угловой координаты 7 включает запоминающее устройство обнаруженных сигналов 8, блок обнаружения пачек импульсов 9 (фиг.2), вычислитель угловой координаты 10, вычислитель коэффициентов параболической огибающей пачек импульсов 11 (фиг.3), причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловой координаты 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока обнаружения пачек импульсов 9 соответственно, М выходов блока обнаружения пачек импульсов 9 соединены с М входами вычислителя коэффициентов параболической огибающей пачек импульсов 11 соответственно, два выхода которого соединены с двумя входами вычислителя угловой координаты 10 соответственно, выход вычислителя угловой координаты 10 является выходом блока оценки угловой координаты 7. Блок обнаружения пачек импульсов 9 включает вычислитель 12, запоминающее устройство весовых коэффициентов 13, устройство сравнения с порогом 14 и ключ 15, причем М входов блока обнаружения пачек импульсов 9 являются первыми М входами вычислителя 12 и ключа 15, М выходов запоминающего устройства весовых коэффициентов 13 соединены со вторыми М входами вычислителя 12 соответственно, выход вычислителя 12 соединен с входом устройства сравнения с порогом 14 соответственно, выход которого соединен с входом ключа 15, причем М выходов ключа 15 являются М выходами блока обнаружения пачек импульсов 9. Вычислитель коэффициентов параболической огибающей пачек импульсов 11 содержит формирователь матрицы  16, вычислитель матрицы
16, вычислитель матрицы  17 и вычислитель вектора
17 и вычислитель вектора  18, причем М входов вычислителя коэффициентов параболической огибающей пачек импульсов являются М входами формирователь матрицы
18, причем М входов вычислителя коэффициентов параболической огибающей пачек импульсов являются М входами формирователь матрицы  16 и М входами вычислителя вектора 18 соответственно, выход формирователя матрицы
16 и М входами вычислителя вектора 18 соответственно, выход формирователя матрицы  16 соединен с входом вычислителя матрицы 17 и входом вычислителя вектора 18, выходы вычислителя матрицы
16 соединен с входом вычислителя матрицы 17 и входом вычислителя вектора 18, выходы вычислителя матрицы  17 и вычислителя вектора 18 являются входами вычислителя коэффициентов 19 соответственно, два выхода вычислителя коэффициентов 19 являются выходами вычислителя коэффициентов параболической огибающей пачек импульсов 11 соответственно.
17 и вычислителя вектора 18 являются входами вычислителя коэффициентов 19 соответственно, два выхода вычислителя коэффициентов 19 являются выходами вычислителя коэффициентов параболической огибающей пачек импульсов 11 соответственно.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника. Т.2. - М.: Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Цифровые элементы: запоминающее устройство обнаруженных сигналов 8, вычислитель 12, запоминающее устройство весовых коэффициентов 13, устройство сравнения с порогом 14, ключ 15 выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: Радио и связь, 1984).
Вычислитель угловой координаты 10 и вычислитель коэффициентов параболической огибающей пачек импульсов 11 реализованы на основе программируемого микропроцессора цифровой обработки сигналов, например серии Л1879 ВМ1. На фиг.4 показан алгоритм работы микропроцессора.
Блок обнаружения пачек импульсов 9 (фиг.3) построен на основе известной структурной схемы (Кузьмин С.3. Основы теории цифровой обработки радиолокационной информации. М.: Советское радио, 1974, стр.38-40, рис.1.11).
Вычислитель угловой координаты 10 реализует вычисления в соответствии с формулами (1) - по первому варианту способа, (2) - по второму варианту способа.
Вычислитель 12 реализует вычисления в соответствии с формулой:  , где n - количество положений луча в угловом пакете принятых сигналов по измеряемой угловой координате объекта θ;
, где n - количество положений луча в угловом пакете принятых сигналов по измеряемой угловой координате объекта θ;  - мощность i-го сигнала пакета, нормированная к среднеквадратическому значению шумов приемного тракта; где ηi - весовые коэффициенты, определенные заранее (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Советское радио, 1974, стр.39, формула (1, 3, 6а)).
- мощность i-го сигнала пакета, нормированная к среднеквадратическому значению шумов приемного тракта; где ηi - весовые коэффициенты, определенные заранее (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Советское радио, 1974, стр.39, формула (1, 3, 6а)).
Работа заявляемой РЛС и осуществление заявляемых способов по первому и второму вариантам при измерении угловой координаты объекта происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловой координаты 7. Значения мощности сигналов с соответствующими угловыми координатами {θi} луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок обнаружения пачек импульсов 9, где происходит обнаружение пачек импульсов. Уровни принятых сигналов и соответствующие принятым сигналам угловые координаты {θi} луча поступают на первые М входов вычислителя 12, на вторые М входов вычислителя 12 поступают весовые коэффициенты из запоминающего устройства весовых коэффициентов 13. В вычислителе 12 производятся перемножения значений мощности сигналов и соответствующих заранее записанных в запоминающее устройство весовых коэффициентов 13, весовых коэффициентов и суммирование полученных произведений. Сигнал, пропорциональный полученной сумме, подается в устройство сравнения с порогом 14, где сравнивается с заранее установленным порогом. Уровень порога задается исходя из допустимой вероятности ложного обнаружения углового пакета. При превышении порога на выходе устройства сравнения с порогом 14 выдается импульс, означающий, что обнаружена пачка импульсов сигналов. Данный импульс разрешает прохождение принятых сигналов и координат луча, соответствующих принятым сигналам, через ключ 15 на выход блока обнаружения пачек импульсов 9 и далее на М входов формирователя матрицы 16, который из значений угловых координат {θi} луча формирует матрицу , имеющую М строк и три столбца, и на М входов вычислителя вектора 18. Значения матрицы подаются на вход вычислителя вектора 18, где вычисляются значения вектора , и на вход вычислителя матрицы  17, где вычисляется матрица
17, где вычисляется матрица  . Полученные значения вектора и матрицы подаются на вычислитель коэффициентов 19, вычисляющий коэффициенты a1 и a2, которые поступают в вычислитель угловой координаты 10. В вычислителе угловой координаты 10 в соответствии с формулами (1) - по первому варианту способа, (2) - по второму варианту способа определяется угловая координата объекта.
. Полученные значения вектора и матрицы подаются на вычислитель коэффициентов 19, вычисляющий коэффициенты a1 и a2, которые поступают в вычислитель угловой координаты 10. В вычислителе угловой координаты 10 в соответствии с формулами (1) - по первому варианту способа, (2) - по второму варианту способа определяется угловая координата объекта.
В предлагаемом способе повышение быстродействия обеспечивается тем, что число операций умножения меньше, чем в наиболее близком техническом решении. Кроме того, предлагаемый способ обеспечивает повышение точности оценки углового положения за счет того, что он менее чувствителен к случайному положению импульсов пачки (в пределах дискрета Δθ) относительно ее максимума.
На фиг.5 представлены результаты статистического моделирования нормированной к ширине Δa диаграммы направленности (ДН) среднеквадратичной ошибки (СКО) измерения угловой координаты объекта по прототипу и по предлагаемому способу. Под величиной СКО понимается значение корня квадратного из усредненного (в данном случае по 1000 случайных реализации актов измерений) квадрата ошибки измерения. Диаграмма направленности (ДН) антенны задается функцией F(θ)=sin(π θ/Δa)/(π θ/Δa), свойственной линейному излучателю с равно-амплитудным и синфазным возбуждением. Соответственно, огибающая незашумленной пачки при радиолокационном наблюдении определяется квадратом ДН, т.е. Аi=F2 (θi). Шум представляется двумя составляющими (синфазной и квадратурной), каждая из которых имеет гауссовское распределение с нулевым средним и статистически для каждого импульса i. Положение импульсов пачки в k-м акте ее реализации задается следующим образом: θi=i*Δθ+τk, где Δθ - угловой дискрет пачки, τk - случайная величина, равномерно распределенная на интервале ±Δθ/2. Т.о. моделируется реальная ситуация, когда импульсы пачки следуют с постоянным угловым дискретом Δθ, но положение начального импульса каждой реализации (с номером k) пачки случайно в пределах этого дискрета. Пороговый уровень формирователя пачек составляет -3дБ относительно номинальной амплитуды максимального импульса. Число угловых дискретов Δθ на ширине ДН Δа (номинальное число импульсов пачки) представляется на фиг.5 величиной N. Результаты статистического моделирования свидетельствуют о том, что предлагаемый способ обеспечивает лучшую точность измерения угловой координаты объекта при соотношении сигнал/шум больше 12÷15 дБ благодаря меньшей чувствительности к случайному положению начала пачки (величина τk). При соотношении сигнал/шум меньше 10дБ само по себе обнаружение пачки становится ненадежным, а потому измерение координаты объекта по представленному изобретению осуществляют при соотношении сигнал/шум больше 12÷15 дБ.
Таким образом, заявленные технические решения обеспечивают достижение технического результата - повышение быстродействия при оценке угловой координаты и повышение точности измерения угловой координаты объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2605433C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| Способ измерения угловых координат цели | 2016 |
|
RU2649880C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2274874C1 |
Изобретение относится к радиолокации и может быть использовано для измерения угловой координаты объектов. Достигаемый технический результат - повышение быстродействия при оценке угловой координаты и повышение точности измерения угловой координаты. В способе измерения угловой координаты объекта в процессе обзора пространства радиолокационной станцией по обоим вариантам, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов и угловых координат луча, соответствующих принятым сигналам, выделение в принятых сигналах пачек импульсов от каждого из объектов, вычисляют угловую координату объекта в результате оценки коэффициентов параболической огибающей выделенных пачек импульсов. Устройство, реализующее способ, включает в себя передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловой координаты, который включает в себя запоминающее устройство обнаруженных сигналов, блок обнаружения пачек импульсов, вычислитель коэффициентов параболической огибающей пачек импульсов и вычислитель угловой координаты объекта. 3 н.п. ф-лы, 5 ил.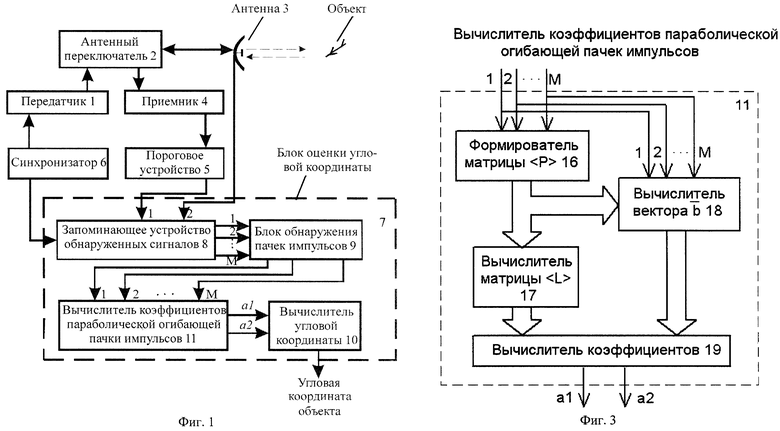
1. Способ измерения угловой координаты объекта, включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов Аi и угловых координат θi луча, соответствующих принятым сигналам, обнаружение пачек импульсов принятых сигналов {Ai, θi} i=1..M, где М - число импульсов пачки, определение угловой координаты объекта, отличающийся тем, что определение угловой координаты объекта осуществляют путем обработки обнаруженных пачек импульсов принятых сигналов следующим образом: из значений угловых координат {θi} луча формируют матрицу , имеющую М строк и три столбца следующей структуры
 ,
,
определяют вектор  образованный тремя искомыми коэффициентами a0, a1, a2 параболической аппроксимации огибающей пачки импульсов принятых сигналов
образованный тремя искомыми коэффициентами a0, a1, a2 параболической аппроксимации огибающей пачки импульсов принятых сигналов  как решение трех алгебраических уравнений:
как решение трех алгебраических уравнений:
где  ;
;

где  - транспонированная матрица ;
- транспонированная матрица ;
 - М-мерный вектор амплитуд сигналов пачки;
- М-мерный вектор амплитуд сигналов пачки;
A1, A2, …Ai, …AM - амплитуды сигналов пачки;
после чего определение угловой координаты объекта осуществляют в соответствии с формулой:
где - измеренная угловая координата объекта.
2. Способ измерения угловой координаты объекта, включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание уровней принятых сигналов Ai и угловых координат θi луча, соответствующих принятым сигналам, обнаружение пачек импульсов принятых сигналов {Ai, θi} i=1..M, где М - число импульсов пачки, определение угловой координаты объекта, отличающийся тем, что определение угловой координаты объекта осуществляют путем обработки обнаруженных пачек импульсов принятых сигналов следующим образом: из значений угловых координат {θi} луча формируют матрицу , имеющую М строк и три столбца следующей структуры
 ,
,
определяют  - значения определителей, получаемых из матрицы
- значения определителей, получаемых из матрицы  путем замены столбцов первого и второго соответственно на вектор
путем замены столбцов первого и второго соответственно на вектор  , где
, где  - транспонированная матрица (Р);
- транспонированная матрица (Р);
- М-мерный вектор амплитуд сигналов пачки;
A1, A2, …Ai, …АM - амплитуды сигналов пачки;
после чего определение угловой координаты объекта осуществляют в соответствии с формулой:
где - измеренная угловая координата объекта.
3. Радиолокационная станция для измерения угловой координаты объекта, содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловой координаты, при этом выход передатчика соединен с входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен с входом приемника, выход которого соединен с входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловой координаты, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловой координаты соответственно, при этом блок оценки угловой координаты включает запоминающее устройство обнаруженных сигналов, блок обнаружения пачек импульсов с М входами и вычислитель угловой координаты с двумя входами, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловой координаты соответственно, М выходов запоминающего устройства обнаруженных сигналов соединены с М входами блока обнаружения пачек импульсов соответственно, выход вычислителя угловой координаты является выходом блока оценки угловой координаты, отличающаяся тем, что в блок оценки угловой координаты дополнительно введен вычислитель коэффициентов параболической огибающей пачек импульсов, два выхода которого соединены с двумя входами вычислителя угловой координаты соответственно, М выходов блока обнаружения пачек импульсов соединены с М входами вычислителя коэффициентов параболической огибающей пачек импульсов соответственно, а вычислитель коэффициентов параболической огибающей пачек импульсов содержит формирователь матрицы  , имеющей М строк и три столбца следующей структуры
, имеющей М строк и три столбца следующей структуры
 ,
,
где  - угловые координаты, импульсов пачки (i=1..М), вычислитель матрицы
- угловые координаты, импульсов пачки (i=1..М), вычислитель матрицы  , где
, где  , где - транспонированная матрица,
, где - транспонированная матрица,  - вычислитель вектора
- вычислитель вектора  , где
, где  , где
, где  - М-мерный вектор амплитуд сигналов пачки, и вычислитель коэффициентов, причем М входов вычислителя коэффициентов параболической огибающей пачек импульсов являются М входами формирователя матрицы
- М-мерный вектор амплитуд сигналов пачки, и вычислитель коэффициентов, причем М входов вычислителя коэффициентов параболической огибающей пачек импульсов являются М входами формирователя матрицы  и вычислителя вектора соответственно, выход формирователя матрицы является входом вычислитель матрицы
и вычислителя вектора соответственно, выход формирователя матрицы является входом вычислитель матрицы  и входом вычислителя вектора , выходы вычислителя вектора и вычислителя матрицы являются входами вычислителя коэффициентов соответственно, два выхода вычислителя коэффициентов являются выходами вычислителя коэффициентов параболической огибающей пачек импульсов соответственно.
и входом вычислителя вектора , выходы вычислителя вектора и вычислителя матрицы являются входами вычислителя коэффициентов соответственно, два выхода вычислителя коэффициентов являются выходами вычислителя коэффициентов параболической огибающей пачек импульсов соответственно.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2331902C2 |
| US 2007008213 A1, 11.01.2007 | |||
| US 5166689 A, 24.11.1992 | |||
| JP 9178841 A, 11.07.1997. | |||

