Предлагаемое изобретение относится к самоходной технике при выполнении строительных работ.
На платформе устанавливают оборудование для вдавливания и завинчивания свай, перемещают массивные грузы, например экскаваторы. В прыгающем режиме платформу используют для уплотнения рыхлых и обладающих недостаточной несущей способностью грунтов. На шагающую и прыгающую платформу могут устанавливаться стрелы и оборудование для подъема массивных грузов или создаваться на ее основе шагающие экскаваторы.
При установке на ней мощных ножей она может использоваться как бульдозер. То есть назначение шагающей и прыгающей платформы многофункциональное.
Известны гусеничные и колесные самоходные платформы, на которые установлены экскаваторы, краны и тому подобное [1, с.156, рис. IV.5.11].
Примем известное техническое решение - самоходную гусеничную платформу за аналог.
Недостаток аналога - значительная трудоемкость изготовления гусеничных устройств и невозможность реализации прыгающего режима платформы.
Технический результат изобретения - повышение проходимости платформы по слабым грунтам и пересеченной местности и расширение ее функционального назначения.
Технический результат реализован тем, что платформа опирается на грунт днищем корпуса и парой лыж, слева и справа параллельных длинным сторонам корпуса, выдвинутых, например, вперед.
Платформа оснащена [2, с.368, рис. 277] четырьмя парами цилиндров-пульсаторов возвратно-поступательного действия, каждый левый цилиндр-пульсатор пары шарнирно соединен с левой лыжей, а каждый правый цилиндр-пульсатор пары шарнирно соединен с правой лыжей.
При этом первая и вторая пары цилиндров-пульсаторов воспринимают преимущественно вертикальные силовые воздействия, а третья и четвертая пары шаговых цилиндров-пульсаторов - шаговые, обеспечивают ее продольно-поступательное движение и повороты платформы.
Каждая пара цилиндров-пульсаторов шарнирно соединена с корпусом, а первая и вторая пары - через рессоры, на платформе установлены: гидропульсирующая насосная станция и в кабине - пульт управления, соединенные маслопроводами с цилиндрами-пульсаторами.
При этом для движения в шаговом режиме включают гидропульсирующую насосную станцию и прямой ход первой, второй и третьей пары, и обратный ход четвертой пары цилиндров-пульсаторов синхронно на левой и правой лыже.
Поднимают корпус платформы на величину Δ, сжимая рессоры на первой и второй паре цилиндров-пульсаторов, и одновременно продвигают корпус шагающей платформы вверх и вперед, преодолевают точку равновесия платформы и заставляют ее силами гравитации продолжать двигаться вперед и выдавливать масло из третьей пары шаговых цилиндров-пульсаторов, сжимая их, а растягивая, - засасывать масло четвертой парой шаговых цилиндров-пульсаторов до плавного соприкосновения днища корпуса с грунтом.
Затем автоматически включают обратный синхронный ход первой и второй пары цилиндров-пульсаторов и прямой ход четвертой пары шаговых цилиндров-пульсаторов, поднимая вверх как левую лыжу, так и правую лыжи и выдвигая их автоматически вперед.
Включают обратный ход четвертой пары и прямой ход третьей пары шаговых цилиндров-пульсаторов, перемещают левую и правую лыжи синхронно вперед и вниз до соприкосновения с грунтом и циклы повторяют, продвигая шагающую платформу вперед, при повороте платформы влево автоматически включают асинхронное движение левой и правой лыж.
Прямой ход правой лыжи и обратный ход левой лыжи и реализуют поворот на месте, при повороте платформы вправо автоматически включают асинхронное движение пары лыж, прямой ход левой лыжи и обратный ход правой лыжи при плавном повороте платформы влево или вправо.
Автоматически включают необходимую амплитуду шага правой или левой лыжи, при движении платформы в режиме трамбовки стопорят движение шагающих цилиндров в определенном положении, устанавливают первую и вторую пары цилиндров-пульсаторов под углом α к вертикали и включают пульсирующий режим их работы, заставляя платформу двигаться вперед или назад скачками с определенным шагом.
Наклоняют первый и второй цилиндры-пульсаторы на левой лыже под углом α вперед и выдвигают левую лыжу вперед, наклоняют первый и второй цилиндры-пульсаторы на правой лыже под углом минус α назад и выдвигают правую лыжу назад.
Автоматически включают пульсирующий режим работы упомянутых цилиндров-пульсаторов и заставляют шагающую платформу прыгать на месте с постепенным разворотом по часовой стрелке ее корпуса, при замене угла наклона α обратным заставляют платформу прыгать на месте с постепенным разворотом в обратную сторону против часовой стрелки.
На фиг.1 показана платформа, опертая на левую и правую лыжи и на днище корпуса, ее центр тяжести находится на минимальной высоте от поверхности грунта, лыжи выдвинуты вперед.
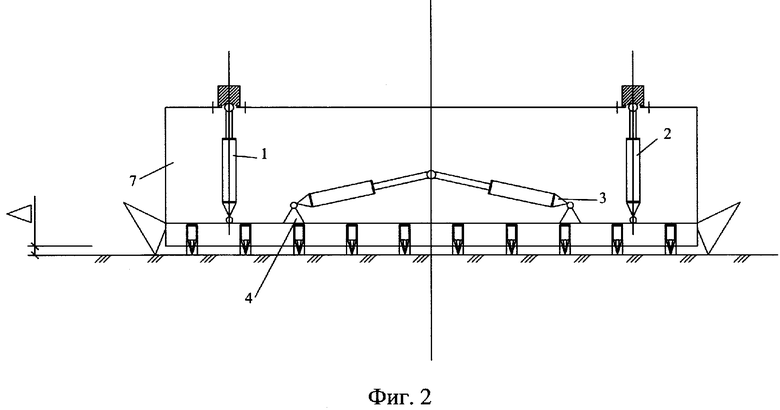
На фиг.2 - платформа оперта на левую и правую лыжу, лыжи не выдвинуты; днище корпуса поднято на величину Δ.
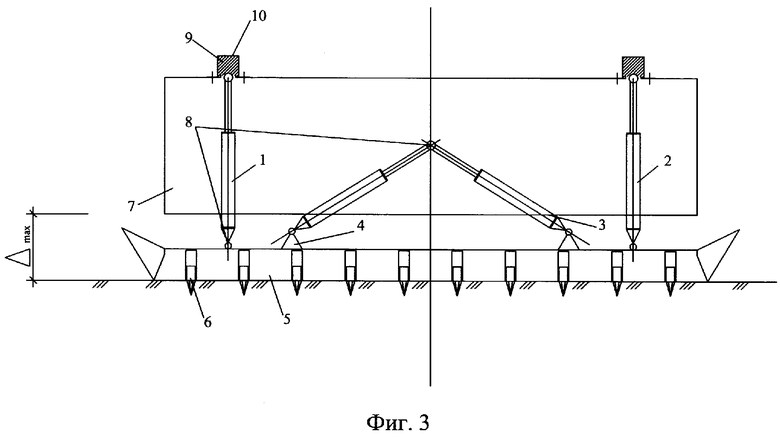
На фиг.3 - платформа оперта на левую и правую лыжу, а между поверхностью грунта и днищем корпуса имеется максимальный зазор Δmax.
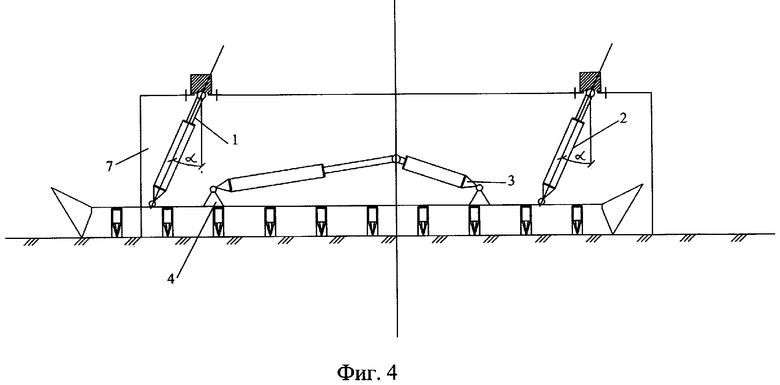
На фиг.4 - левая и правая лыжи и днище корпуса оперты на грунт, корпус платформы выдвинут максимально вперед.
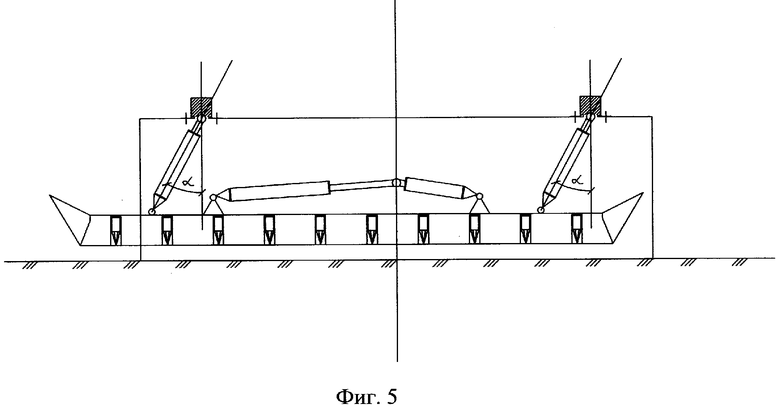
На фиг.5 - левая и правая лыжи приподняты и начато выдвижение их вперед, опора на днище корпуса.
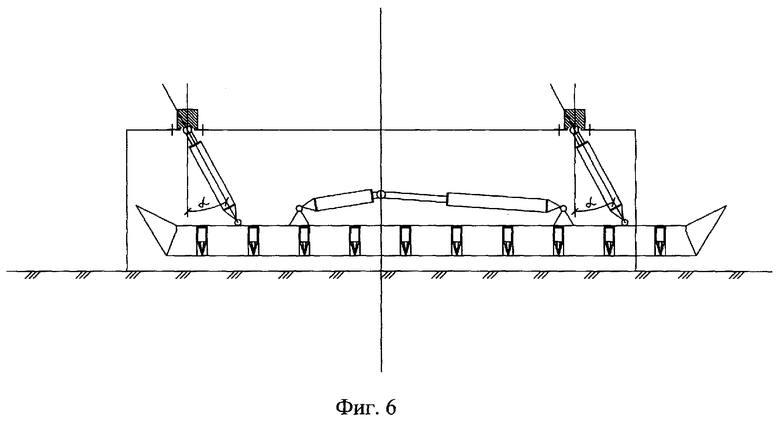
На фиг.6 - левая и правая лыжи максимально выдвинуты вперед.
На фиг.1 показана платформа, опертая на левую и правую лыжи и на днище корпуса, ее центр тяжести находится на минимальной высоте от поверхности грунта.
Платформа оснащена четырьмя парами цилиндров-пульсаторов.
Первая 1 и вторая 2 пары цилиндров-пульсаторов ориентированы вертикально и воспринимают вертикальные воздействия. Они реализуют прыгающий режим работы.
Третья 3 и четвертая 4 пары шаговых цилиндров-пульсаторов обеспечивают шагающие поступательные и шагающие вращательные движения платформы. Пары 1, 2, 3, 4 цилиндров-пульсаторов соединены с парой лыж 5, с выдвижными зубьями 6 и корпусом 7 посредством шарниров 8. Шарнирные крепления 8 к корпусу 7 имеют рессоры 9, смягчающие динамику.
Рессоры 9 выполнены из цилиндрических пружин, помещенных в цилиндрические кожухи 10, которые жестко соединены, например, болтами с корпусом 7.
На фиг.1 пары цилиндров-пульсаторов 1, 2 наклонены максимально вперед. Левая и правая лыжи 5 также выдвинуты максимально вперед. Днище корпуса 7 оперто на грунт.
Платформа может двигаться из этого положения вперед. Для продолжения движения корпус 7 перемещают вперед, опираясь на пару лыж.
Все пары цилиндров-пульсаторов 1, 2, 3, 4 соединены маслопроводами с гидропульсирующей насосной станцией 11 и пультом управления 12 в кабине, размещенными на платформе. Возможно и дистанционное управление платформой посредством дистанционного пульта.
Гидропроводы снабжены манометрами для измерения давления масла и величины динамических импульсов и статических воздействий, развиваемых цилиндрами-пульсаторами.
Реализация шагающего и прыгающего движения платформы.
При включении гидропульсирующей насосной станции (фиг.1) и включении прямого хода третьей пары и обратного хода четвертой пары шаговых цилиндров-пульсаторов происходит синхронное выталкивание третьими и подтягивание четвертыми шаговыми цилиндрами-пульсаторами корпуса вперед как на левой, так и на правой лыже. Этим заставляют корпус платформы продвигаться вперед и сжимать рессоры на первой и второй паре цилиндров-пульсаторов. Пары цилиндров-пульсаторов переходят из наклонного положения (фиг.1) в вертикальное положение (фиг.2) и поднимают платформу вверх. Между днищем корпуса 7 и поверхностью грунта возникает зазор. Зазор Δ изменяется до максимального зазора Δmax (фиг.3).
Платформа, преодолев точку равновесия (фиг.3), продолжает двигаться вперед силами гравитации и выдавливать масло из пары третьих цилиндров-пульсаторов, сжимая их, и растягивать и засасывать масло парой четвертых цилиндров-пульсаторов до плавного соприкосновения корпуса с грунтом (фиг.4).
Автоматически включают обратный ход первой и второй пары цилиндров-пульсаторов, поднимая вверх левую и правую лыжи. Автоматически включают обратный ход четвертой пары и прямой ход третьей пары шаговых цилиндров-пульсаторов. Выдвигают левую и правую лыжи максимально вперед до соприкосновения с грунтом (фиг.6) и циклы повторяют, продвигая платформу вперед шагами. Аналогичным образом реализованы и обратные шагающие движения платформы.
При повороте платформы влево автоматически включают асинхронное движение левой и правой лыж, прямой ход правой лыжи и обратный ход левой лыжи и реализуют поворот ее на месте. При повороте платформы вправо автоматически включают асинхронное движение левой и правой лыжи, прямой ход левой лыжи и обратный ход правой лыжи.
При плавном повороте платформы влево или вправо автоматически включают большую или меньшую амплитуду шагания правой или левой лыжи.
При использовании платформы как трамбовки стопорят движения пар шагающих цилиндров в определенном положении, устанавливают первый и второй пары цилиндров-пульсаторов под углом α к вертикали и включают пульсирующий режим их работы, заставляя платформу двигаться вперед или назад скачками с определенным шагом.
Наклоняют первый и второй цилиндры-пульсаторы на левой лыже под углом α вперед и выдвигают ее вперед. Наклоняют первый и второй цилиндры-пульсаторы на правой лыже под углом минус α назад и выдвигают ее назад. Автоматически включают пульсирующий режим работы первой и второй пары цилиндров-пульсаторов и принуждают платформу прыгать на месте с постепенным разворотом по часовой стрелке ее корпуса.
Заменяют угол наклона α обратным и принуждают платформу прыгать на месте с постепенным разворотом в обратную сторону против часовой стрелки.
Сопоставление шагающей и прыгающей платформы с аналогом показывает ее следующие отличия, а именно:
- платформа снабжена парой лыж и четырьмя парами цилиндров-пульсаторов на левой и правой лыже,
- третья и четвертая пары шаговых цилиндров-пульсаторов реализуют шагающие и движения вперед, назад, повороты на месте влево и вправо, плавные повороты по радиусу;
- первая и вторая пары цилиндров-пульсаторов реализуют прыжки на месте;
- четыре пары цилиндров-пульсаторов реализуют прыжки с поворотом, прыжки с продвижением назад и вперед с поворотом и без поворота;
- платформа удобна для установки на ней устройств, вдавливающих и ввинчивающих сваи; уплотнения и упрочнения грунтового основания, установки кранового, экскаваторного и бульдозерного оборудования;
- платформа обеспечивает вдавливание и выдергивание свай и фундаментов из грунта на проектную глубину;
- большая площадь опоры пары лыж и малая величина удельного давления позволяют ей двигаться по заболоченной местности.
Экономический эффект от шагающей и прыгающей платформы достигнут из-за следующего, а именно:
- платформа обеспечивает повышение производительности труда при установке на ней устройств, вдавливающих и ввинчивающих сваи;
- прыгающие движения платформы обеспечивают повышение производительности труда при уплотнении и упрочнении грунтового основания;
- крановое, экскаваторное и бульдозерное оборудование, смонтированное на платформе, имеет высокую проходимость, так как большая площадь опор лыж и малая величина удельного давления позволяют ей двигаться по заболоченной местности;
- платформа обеспечивает выдергивание и вдавливание свай и фундаментов из грунта до проектной отметки.
Литература
1. Справочник по кранам: В 2 т. Т.2. Характеристики и конструктивные схемы кранов. Крановые механизмы, их детали и узлы. Техническая эксплуатация кранов /М.П.Александров, М.М.Гохберг, А.А.Ковин; общая ред. М.М.Гохберга. - Л.: Машиностроение, Ленингр. отделение, 1988. - 559 с.
2. Серенсен С.В., Гарф М.Э., Козлов Л.А. Машины для испытаний на устойчивость /Под. ред. Серенсен С.В. - М., 1957. - 404 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОВРЕМЕННОГО ЗАВИНЧИВАНИЯ В ГРУНТ ДВУХ ВИНТОВЫХ ЖЕЛЕЗОБЕТОННЫХ ПЯТ | 2005 |
|
RU2295004C2 |
| СПОСОБ НАДВИЖКИ МОСТОВОГО ПРОЛЕТНОГО СТРОЕНИЯ | 2001 |
|
RU2209872C2 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| БОЛОТОХОДНАЯ ШАГАЮЩАЯ МАШИНА | 2023 |
|
RU2809311C1 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| СПОСОБ ИСПЫТАНИЙ РАМ И КОНСТРУКЦИЙ ГИДРОПУЛЬСАЦИОННЫМИ УСТАНОВКАМИ ПРИ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЯХ | 2008 |
|
RU2418277C2 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Транспортное средство высокой проходимости | 2021 |
|
RU2814872C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| СПОСОБ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ДВИЖИТЕЛЯ ВОЕННОЙ ТЕХНИКИ И УСТРОЙСТВО ДВИЖИТЕЛЯ ВОЕННОЙ ТЕХНИКИ | 2013 |
|
RU2536267C1 |
Изобретение относится к самоходной технике при выполнении строительных работ. На платформе устанавливают оборудование для вдавливания и завинчивания свай, перемещают массивные грузы, например экскаваторы. В прыгающем режиме платформу используют для уплотнения рыхлых и обладающих недостаточной несущей способностью грунтов. На шагающую и прыгающую платформу могут устанавливаться стрелы и оборудование для подъема массивных грузов или создаваться на ее основе шагающие экскаваторы. Платформа оснащена четырьмя парами цилиндров-пульсаторов. Первая и вторая пары цилиндров-пульсаторов ориентированы вертикально, воспринимают вертикальные воздействия и реализуют прыгающий режим работы. Третья и четвертая пары шаговых цилиндров-пульсаторов обеспечивают шагающие поступательные и шагающие вращательные движения платформы. Пары цилиндров-пульсаторов соединены с парой лыж, с выдвижными зубьями и корпусом посредством шарниров. Шарнирные крепления к корпусу имеют рессоры, смягчающие динамику. Рессоры выполнены из цилиндрических пружин, помещенных в цилиндрические кожухи, которые жестко соединены, например, болтами с корпусом. Технический результат - высокая проходимость, так как большая площадь опор лыж и малая величина удельного давления позволяют платформе двигаться по заболоченной местности; платформа обеспечивает выдергивание и вдавливание свай и фундаментов из грунта до проектной отметки. 6 ил.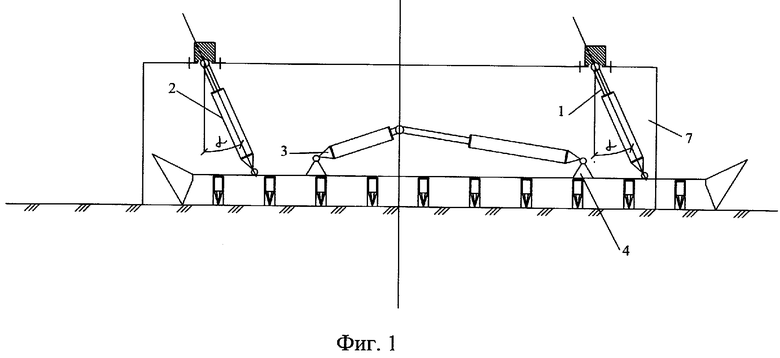
Способ движения платформы, содержащей корпус, отличающийся тем, что платформа опирается на грунт днищем корпуса и парой лыж, слева и справа параллельных длинным сторонам корпуса, выдвинутых, например, вперед, платформа оснащена четырьмя парами цилиндров-пульсаторов возвратно-поступательного действия, каждый левый цилиндр-пульсатор пары шарнирно соединен с левой лыжей, а каждый правый цилиндр-пульсатор пары шарнирно соединен с правой лыжей, при этом первая и вторая пары цилиндров-пульсаторов воспринимают преимущественно вертикальные силовые воздействия, а третья и четвертая пары цилиндров-пульсаторов - шаговые и обеспечивают ее продольно-поступательное движение и повороты платформы, каждая пара цилиндров-пульсаторов шарнирно соединена с корпусом, а первая и вторая пары - через рессоры, на платформе установлены гидропульсирующая насосная станция и в кабине пульт управления, соединенные маслопроводами с цилиндрами-пульсаторами, при этом для движения в шаговом режиме включают гидропульсирующую насосную станцию и прямой ход первой, второй и третьей пары и обратный ход четвертой пары цилиндров-пульсаторов синхронно на левой и правой лыже, поднимают корпус платформы на величину Δ, сжимая рессоры на первой и второй паре цилиндров-пульсаторов, и одновременно продвигают корпус платформы вверх и вперед, преодолевают точку равновесия платформы и заставляют ее силами гравитации продолжать двигаться вперед и выдавливать масло из третьей пары шаговых цилиндров-пульсаторов, сжимая их, а растягивая - засасывать масло четвертой парой шаговых цилиндров-пульсаторов до плавного соприкосновения днища корпуса с грунтом, затем автоматически включают обратный синхронный ход первой и второй пары цилиндров-пульсаторов и прямой ход четвертой пары шаговых цилиндров-пульсаторов, поднимая вверх как левую лыжу, так и правую лыжу, и выдвигая их автоматически вперед, включают обратный ход четвертой пары и прямой ход третьей пары шаговых цилиндров-пульсаторов, перемещают левую и правую лыжи синхронно вперед и вниз до соприкосновения с грунтом и циклы повторяют, продвигая платформу вперед, при повороте платформы влево автоматически включают асинхронное движение левой и правой лыж, прямой ход правой лыжи и обратный ход левой лыжи и реализуют поворот на месте, при повороте платформы вправо автоматически включают асинхронное движение пары лыж, прямой ход левой лыжи и обратный ход правой лыжи, при плавном повороте платформы влево или вправо автоматически включают необходимую амплитуду шага правой или левой лыжи, при движении платформы в режиме трамбовки стопорят движение шагающих цилиндров в определенном положении, устанавливают первую и вторую пары цилиндров-пульсаторов под углом α к вертикали и включают пульсирующий режим их работы, заставляя платформу двигаться вперед или назад скачками с определенным шагом, наклоняют первый и второй цилиндры-пульсаторы на левой лыже под углом α вперед и выдвигают левую лыжу вперед, наклоняют первый и второй цилиндры-пульсаторы на правой лыже под углом минус α назад и выдвигают правую лыжу назад, автоматически включают пульсирующий режим работы упомянутых цилиндров-пульсаторов и заставляют платформу прыгать на месте с постепенным разворотом по часовой стрелке ее корпуса, при замене угла наклона α обратным заставляют платформу прыгать на месте с постепенным разворотом в обратную сторону против часовой стрелки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ХАРАКТЕРИСТИКИ И КОНСТРУКТИВНЫЕ СХЕМЫ КРАНОВ | |||
| КРАНОВЫЕ МЕХАНИЗМЫ, ИХ ДЕТАЛИ И УЗЛЫ | |||
| ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ КРАНОВ /М.П.АЛЕКСАНДРОВ, М.М.ГОХБЕРГ, А.А.КОВИН; ОБЩАЯ РЕД | |||
| М.М.ГОХБЕРГА | |||
| - Л.: МАШИНОСТРОЕНИЕ, ЛЕНИНГР | |||
| ОТДЕЛЕНИЕ, 1988, СТР | |||
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
| Шагающий механизм к самоходной повозке | 1955 |
|
SU112203A1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ МНОГОКОРПУСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО МНОГОКОРПУСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131371C1 |
| Механизм движения шагающего экскаватора | 1949 |
|
SU92566A1 |

