Изобретение относится к радиолокации и может быть использовано в системах оценки эффективной площади рассеяния (ЭПР) аэродинамической цели.
ЭПР цели является одним из признаков, используемых при классификации цели. Его применение позволяет распознавать: крупноразмерные цели (транспортные самолеты, бомбардировщики и др.), среднеразмерные цели (средние и тяжелые истребители, вертолеты, тяжелые беспилотники и т.п.), малоразмерные цели (ракеты, снаряды реактивной системы залпового огня, мины, ложные цели, легкие беспилотники и т.п.), когда различия в ЭПР целей составляют 10 дб и более [1].
Достоверность оценки ЭПР зависит от способа оценки. Рассмотрим известные алгоритмы (способы).
Первый основан на данных оценки мощности принимаемого сигнала цели с шумом Dц и шума DШ, вычислении мощности сигнала цели Рц=Dц-DШ на выходе приемника на сопровождаемой дальности Rц и данных калибровки радиолокационной станции (РЛС) по эталонной цели с известной ЭПР σЭ, мощности отраженного эталоном сигнала РЭ на выходе приемника на дальности RЭ при одинаковых параметрах модуляции сигнала, длины излучаемой волны λ, мощности зондирующего сигнала Ρ и коэффициента G усиления приемопередающей антенны в направлении к цели [2, с. 36]:

где σц - ЭПР цели;
kУц и kУЭ - коэффициенты усиления приемника сигналов цели и эталона соответственно, обеспечивающие их прием в линейном режиме.
С учетом усреднения независимых оценок ЭПР точечной цели по измерениям 
 и релеевского распределения амплитуды отраженного сигнала не смещенное значение σц определяется из выражения:
и релеевского распределения амплитуды отраженного сигнала не смещенное значение σц определяется из выражения:

где 

DЦi и DШi - значения мощности сигнала цели с шумом и мощности шума на i-том измерении соответственно;
Ai -амплитуда сигнала цели с шумом на i-том измерении;
σш - среднеквадратическое значение амплитуды шума;
ΨЭ - коэффициент, учитывающий априорные данные калибровки РЛС по эталонной цели.
В отличие от первого алгоритма, во втором для оценок ЭПР используют сигналы цели, для которых амплитуда Ai больше порога обнаружения h. Оценки ЭПР на участках не обнаружения соответствуют памяти предшествующей оценки, полученной по выборкам амплитуд сигнала, превысивших порог обнаружения.
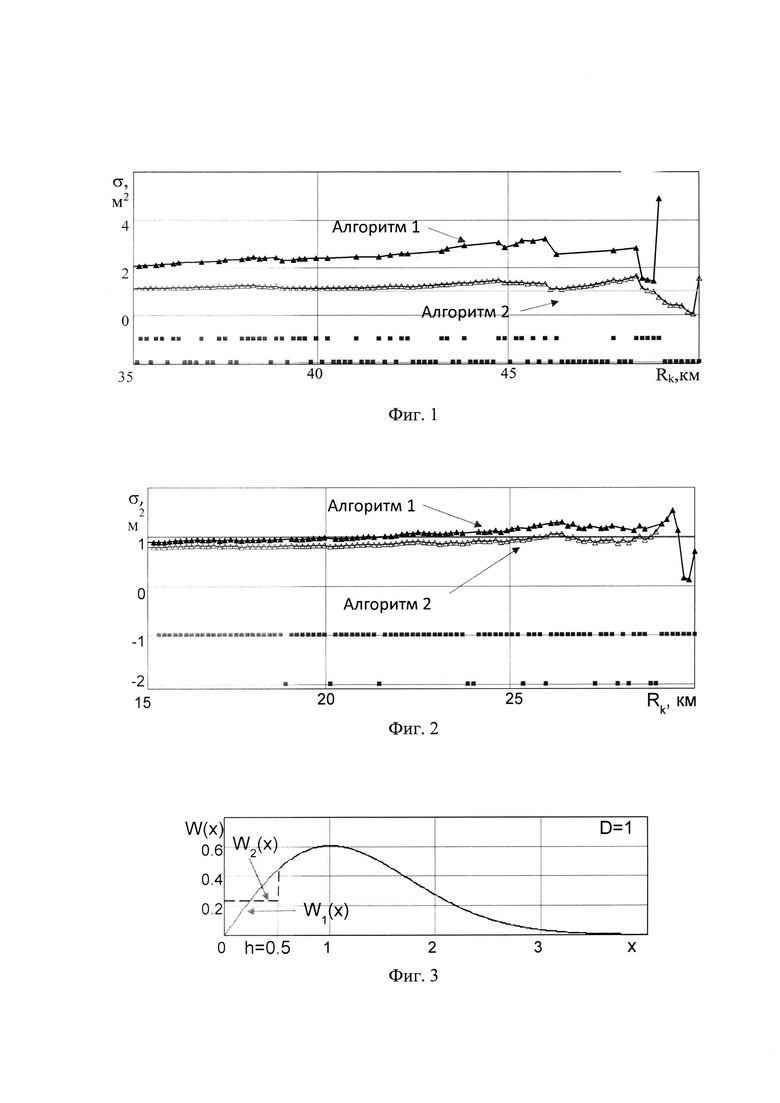
Результаты моделирования алгоритма оценивания ЭПР цели по первому и второму алгоритму при движении цели со скоростью V=300 м/с с дальности R0=50 км приведены на фиг.1 и фиг.2. Имитировался сигнал цели с ЭПР σ=1 м2, измерения проводились с тактом ΔΤ=0,5 с, отношение сигнал/шум на выходе линейной части приемника соответствовало текущей дальности цели и на максимальной дальности составляло q=10 дБ. Продолжительность работы 100 тактов (50 с). Изменение дальности цели во времени определялась выражением:

В нижней части фиг.1 и фиг.2 символом « обозначены моменты обнаружения цели на уровне и моменты не обнаружения цели на уровне «-2». Порог обнаружения h соответствовал вероятности ложной тревоги  .
.
По алгоритму 1 отличие оценки ЭПР от истинного значения достигает 2 и более раз. Оценки ЭПР по алгоритму 2 ближе к истинному значению в диапазоне дальностей до 48 км. При уменьшении дальности частота обнаружений цели повышается, оценки по алгоритмам 1 и 2 сходятся к истинному значению (фиг.2).
Известен третий способ [3, с. 318] оценки параметров цели по наблюдаемой последовательности сигналов цели с шумом, где перебором гипотез об искомом параметре цели и выбором критерия качества решения делают вывод о значении параметра цели в априорном коридоре. Критерии качества зависят от полноты располагаемых априорных данных. Если в задаче проверки гипотез неизвестны и априорная плотность вероятности W(ϑ), и матрица потерь П( , ϑ), то критерием качества принятия решения может служить максимум функционала правдоподобия. Данный способ принят в качестве прототипа. Конкретизируем его при измерении ЭПР цели по выборкам амплитуд отраженного сигнала цели.
, ϑ), то критерием качества принятия решения может служить максимум функционала правдоподобия. Данный способ принят в качестве прототипа. Конкретизируем его при измерении ЭПР цели по выборкам амплитуд отраженного сигнала цели.
Распределение амплитуды отраженного сигнала цели xi при отсутствии на ней преобладающей блестящей точки соответствует распределению Релея [3, с. 58]:

D - дисперсия (средняя мощность) сигнала цели с шумом.
Вид W1(xi) при D=1 приведен на фиг.3.
Совместная плотность вероятности I независимых выборок амплитуды отраженных сигналов (функционал правдоподобия W1(X⏐D)) при конкретном значении средней мощности сигнала цели с шумом D определяется выражением:

где 
kУ - коэффициент усиления приемника на сопровождаемой дальности, обеспечивающего прием сигнала цели в линейном режиме и его амплитуду на выходе приемника в расчетном диапазоне;
Ρ - мощность излученного сигнала;
G - коэффициент усиления приемопередающей антенны в направлении цели;
λ - длина волны излучаемого сигнала;
R - сопровождаемая дальность цели;
σ - ЭПР цели;
DШ - мощность шума.
Перебором гипотез  о значении ЭПР цели σj находят гипотезу, обеспечивающую максимум функционала правдоподобия W1(X⏐D) или его логарифма
о значении ЭПР цели σj находят гипотезу, обеспечивающую максимум функционала правдоподобия W1(X⏐D) или его логарифма

соответственно оценку ЭПР. Оценка по максимуму L(σ) требует меньше вычислительных затрат.
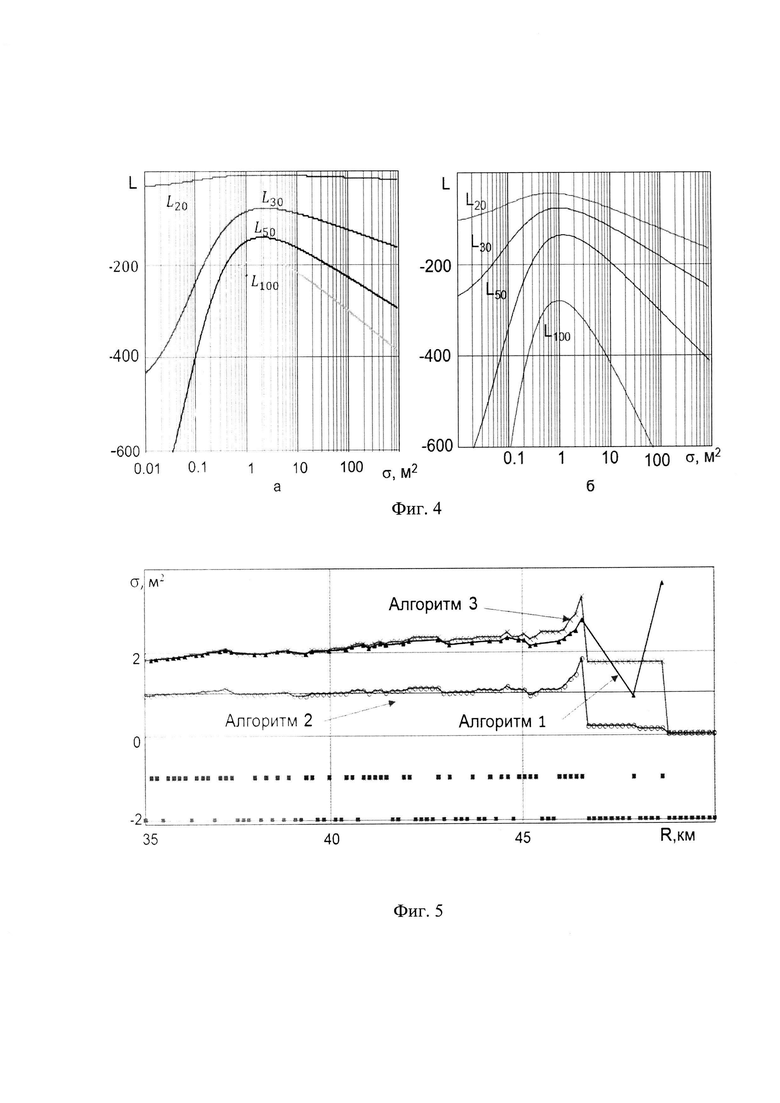
Вид логарифма функционала правдоподобия при истинной ЭПР цели σ=1 м2 в зависимости от числа измерений при числе наблюдений I=20, 30, 50 и 100 приведен на фиг.4а. Видно, что разброс оценок положения максимума логарифма функционала правдоподобия L(σ) снижается с увеличением числа измерений I (обостряется максимум логарифма правдоподобия).
Моделированием на фиг.5 получены эволюции оценок ЭПР цели, сопровождаемой по дальности, по алгоритмам 1, 2 и 3. Условия моделирования были те же, что и в предыдущем моделировании для фиг.1 и 2.
Видно, что оценки ЭПР цели по одной и той же случайной реализации выборок амплитуд отраженного сигнала для алгоритма 1 и 3 на дальностях R<46 км практически аналогичны и имеют систематическую ошибку, зависящую от соотношения сигнал/шум. Оценки ЭПР цели по алгоритму 2 (по выборкам амплитуды сигнала цели, превышающего порог обнаружения) на тех же дальностях близки к имитируемой σ=1 м2.
Если в алгоритмах 1 и 3 предусмотреть компенсацию априорной зависимости смещения оценок ЭПР от соотношения сигнал/шум, то максимальные рабочие дальности и точности оценок ЭПР трех алгоритмов в условиях моделирования близки.
Недостатком прототипа (алгоритм 3) является зависимость смещения оценок ЭПР цели от соотношения сигнал/шум, которое необходимо оценивать для компенсации систематической ошибки. При этом велика разность между максимальной дальностью сопровождения флюктуирующей цели и максимальной дальностью, до которой оценки ЭПР цели близки к истинной.
Целью предполагаемого изобретения является снижение разности между максимальной дальностью сопровождения флюктуирующей цели и максимальной дальностью, до которой оценки ЭПР цели близки к истинной и не требуют компенсации смещения, связанного с зависимостью от соотношения сигнал/шум.
Поставленная цель достигается тем, что на интервалах обнаружения цели, где xi≥h, функционал правдоподобия аппроксимируется распределением Релея при расчетной дисперсии (мощности) сигнала цели с шумом Dij, а на участке не обнаружения, где xi≤h, - равновероятным законом с плотностью вероятности, равной  , где h - порог обнаружения сигнала цели.
, где h - порог обнаружения сигнала цели.
Вид плотности вероятности амплитуды сигнала (фиг.3) в этом случае описывается:

где 
Логарифм функционала правдоподобия L(σj) для гипотезы σj, соответствующий всей информационной выборке X=(x0, x1, … xI-1) имеет вид фиг.4б и определяется выражением:

где 
В отличие от логарифма функционала правдоподобия фиг.4а, логарифм функционала правдоподобия фиг.4б имеет более острый максимум, соответственно меньший разброс оценок ЭПР при одинаковых флюктуациях сигнала цели и большее значение максимальной дальности, на которой оценки ЭПР допустимо близки к истинной. Кроме того, видно, что смещение максимума логарифма функционала правдоподобия по предлагаемому алгоритму на фиг.4б относительно истинного значения ЭПР меньше, чем в прототипе на фиг.4а.
Предлагаемый способ оценки эффективной площади рассеяния аэродинамической цели включает:
Облучение цели когерентным зондирующим сигналом с разрешением по дальности, априорно превышающим радиальный размер цели.
Когерентный прием и спектральный анализ эхо-сигналов цели в рабочем диапазоне дальностей.
Пороговое обнаружение и сопровождение цели по дальности и углу.
Автоматическое регулирование усиления приемника, обеспечивающее прием сигнала цели на сопровождаемой дальности в линейном режиме, при котором амплитуда сигнала цели на выходе приемника находится в расчетном динамическом диапазоне, независимом от дальности сопровождаемой цели.
Определение ширины спектра эхо-сигнала цели Δƒц, сравнение с полосой пропускания доплеровских фильтров спектроанализатора Δƒдф. Если Δƒц больше Δƒдф, увеличивают полосу пропускания доплеровских фильтров спектроанализатора до тех пор, пока наблюдаемый спектр цели не будет наблюдаться в одном доплеровском фильтре.
Оценку коэффициента усиления приемника kУi на сопровождаемой дальности R по известной зависимости коэффициента усиления приемника от напряжения регулировки, поступающего в приемник от системы автоматической регулировки усиления.
Оценку на каждом измерении  амплитуды сигнала цели с шумом xi.
амплитуды сигнала цели с шумом xi.
Оценку в каждом i-том измерении мощности шума DШi на сопровождаемой дальности R через расчет усредненной оценки мощности шума по элементам разрешения дальность - доплеровская частота, свободных от сигнала цели.
Выдвижение гипотез о значении эффективной площади рассеяния (ЭПР) цели σj, 
Вычисление для каждой гипотезы j расчетной мощности сигнала цели на i-том измерении по формуле
где Ρ - мощность излучаемого сигнала,
G - коэффициент усиления антенны,
λ - длина волны излучаемого сигнала.
Расчет для каждой информационной выборки амплитуды сигнала цели с шумом xi логарифма функционала правдоподобия Li(σj) гипотезы о ЭПР цели σj на сопровождаемой дальности R на i-том измерении, в дальнейшем называемом логарифмом функционала правдоподобия j-той гипотезы на i-том измерении.
Вычисление логарифмов функционала правдоподобия L(σj) для каждой j-той гипотезы о ЭПР цели σj по совокупности I независимых измерений
Оценку ЭПР цели  по максимуму функционала правдоподобия L(σj) по формуле
по максимуму функционала правдоподобия L(σj) по формуле

отличающийся тем, что логарифмом функционала правдоподобия j-той гипотезы на i-том измерении Li(σj) для каждой информационной выборки амплитуды сигнала цели с шумом xi рассчитывают по формуле
где h - порог обнаружения сигнала цели.
Сущность предлагаемого способа оценки ЭПР цели поясняется дальнейшим описанием и чертежами.
На фиг.1 и 2 представлены результаты моделирования оценок ЭПР цели на двух участках дальности алгоритмами 1 и 2 при сопровождении цели.
На фиг.3 представлены виды плотности вероятности амплитуды сигнала цели в прототипе и предлагаемом алгоритме.
На фиг.4а представлен вид функционала правдоподобия при оценках ЭПР цели алгоритмом прототипа.
На фиг.4б представлен вид функционала правдоподобия при оценках ЭПР цели предлагаемым алгоритмом.
На фиг.5 представлены сравнительные результаты моделирования оценок ЭПР цели алгоритмами 1, 2 и 3 при сопровождении цели.
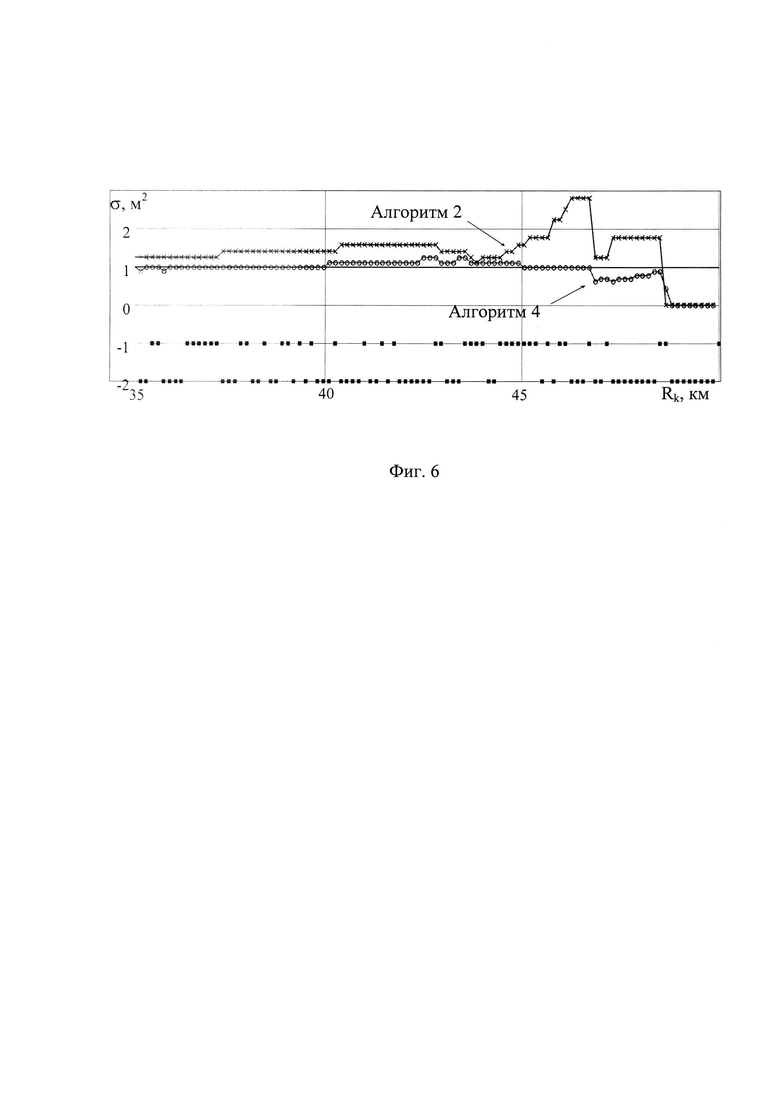
На фиг.6 представлены результаты моделирования оценок ЭПР цели предлагаемым алгоритмом 4 и алгоритмом 2 при сопровождении цели.
Предлагаемый способ реализуется следующим образом:
Облучают цели когерентным зондирующим сигналом с разрешением по дальности, априорно превышающим радиальный размер цели.
Когерентно принимают и выполняют спектральный анализ эхо-сигналов цели в рабочем диапазоне дальностей.
Выполняют пороговое обнаружение и сопровождение цели по дальности и углу.
Автоматически регулируют усиление приемника, обеспечивающее прием сигнала цели на сопровождаемой дальности в линейном режиме, при котором амплитуда сигнала цели на выходе приемника находится в расчетном динамическом диапазоне, независимом от дальности сопровождаемой цели.
Определяют ширину спектра эхо-сигнала цели Δƒц, сравнивают с полосой пропускания доплеровских фильтров спектроанализатора Δƒдф. Если Δƒц больше Δƒдф, увеличивают полосу пропускания доплеровских фильтров спектроанализатора до тех пор, пока наблюдаемый спектр цели не будет наблюдаться в одном доплеровском фильтре.
Определяют коэффициент усиления приемника kУi на сопровождаемой дальности R по известной зависимости коэффициента усиления приемника от напряжения регулировки, поступающего в приемник от системы автоматической регулировки усиления.
Определяют на каждом измерении  амплитуду сигнала цели с шумом.
амплитуду сигнала цели с шумом.
Определяют на каждом i-том измерении мощность шума DШi на сопровождаемой дальности R через расчет усредненной оценки мощности шума по элементам разрешения дальность - доплеровская частота, свободных от сигнала цели.
Выдвигают гипотезы о значении эффективной площади рассеяния (ЭПР) цели σj,  .
.
Вычисляют для каждой гипотезы j расчетную мощность сигнала цели на i-том измерении по формуле
где Ρ - мощность излучаемого сигнала,
G - коэффициент усиления антенны,
λ - длина волны излучаемого сигнала.
Рассчитывают для каждой информационной выборки амплитуды сигнала цели с шумом xi логарифм функционала правдоподобия Li(σj) гипотезы о ЭПР цели σj на сопровождаемой дальности R на i-том измерении, в дальнейшем называемом логарифмом функционала правдоподобия j-той гипотезы на i-том измерении по формуле
где h - порог обнаружения сигнала цели.
Вычисляют логарифмы функционала правдоподобия L(σj) для каждой j-той гипотезы о ЭПР цели σj по совокупности I независимых измерений
Выполняют оценку ЭПР цели  по максимуму функционала правдоподобия L(σj) по формуле
по максимуму функционала правдоподобия L(σj) по формуле  .
.
Проведено сравнительное моделирование оценок ЭПР цели по положению максимума логарифма функционала правдоподобия предлагаемым алгоритмом 4 и алгоритмом 2, который дает наименьшее смещение оценки ЭПР относительно истинного значения по сравнению с прототипом 3. Результаты приведены на фиг.6. Видно, что предлагаемый алгоритм в условиях моделирования выдает оценку ЭПР на участке сопровождения цели (число обнаружений сигнала на скользящем участке наблюдения больше порога), близкую к истинной, до дальности 47 км, а алгоритм 2 до дальности 44,5 км.
Это подтверждает большую эффективность предлагаемого алгоритма по сравнению прототипом: снизилась разность между максимальной дальностью сопровождения флюктуирующей цели и максимальной дальностью, до которой оценки ЭПР цели близки к истинной, оценки ЭПР не требуют компенсации смещения, связанного с зависимостью от соотношения сигнал/шум.
Заявленный способ оценки ЭПР аэродинамической цели не предъявляет высоких требований к быстродействию и объему памяти вычислителей, не накладывает дополнительных ограничений ни на состав датчиков информации, ни на условия их функционирования, поэтому может быть использован как в существующих, так и в перспективных радиолокационных системах.
Использование изобретения позволяет увеличить диапазон дальностей, на которых получают оценку ЭПР цели, близкую к истинной.
Литература
1 https://studfiles.net/preview57729341/page4
2 Бакулев П.А. Радиолокационные системы. - М: Радиотехника, 2004.
3 Левин Б.Р. Теоретические основы статистической радиотехники. - М: Радио и связь, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2017 |
|
RU2667484C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| Способ распознавания типа воздушного объекта по турбинному эффекту | 2022 |
|
RU2790143C1 |
Изобретение относится к радиолокации и может быть использовано в системах оценки эффективной площади рассеяния (ЭПР) аэродинамической цели. Техническим результатом является снижение разности между максимальной дальностью сопровождения флюктуирующей цели и максимальной дальностью, до которой оценки ЭПР цели близки к истинной и не требуют компенсации смещения, связанного с зависимостью от соотношения сигнал/шум. В заявленном способе при оценке ЭПР цели по максимуму функционала правдоподобия для каждой j-й гипотезы ЭПР цели функционал правдоподобия аппроксимируют двумя участками: первый участок, где амплитуда сигнала цели с шумом xi больше или равна порогу обнаружения h, - релеевским распределением при расчетной дисперсии амплитуды сигнала цели с шумом Dij, а на втором участке, где амплитуда сигнала цели xi меньше порога обнаружения h, равновероятным законом с плотностью вероятности, равной  , где Dij рассчитывается по известному выражению как функция сопровождаемой по дальности и углу цели, гипотезы значения ЭПР σj, коэффициента усиления приемопередающей антенны в направлении на цель, мощности передатчика, коэффициента усиления приемника kУi на сопровождаемой дальности по известной зависимости коэффициента усиления приемника от напряжения регулировки, поступающего в приемник от системы автоматической регулировки усиления. 6 ил.
, где Dij рассчитывается по известному выражению как функция сопровождаемой по дальности и углу цели, гипотезы значения ЭПР σj, коэффициента усиления приемопередающей антенны в направлении на цель, мощности передатчика, коэффициента усиления приемника kУi на сопровождаемой дальности по известной зависимости коэффициента усиления приемника от напряжения регулировки, поступающего в приемник от системы автоматической регулировки усиления. 6 ил.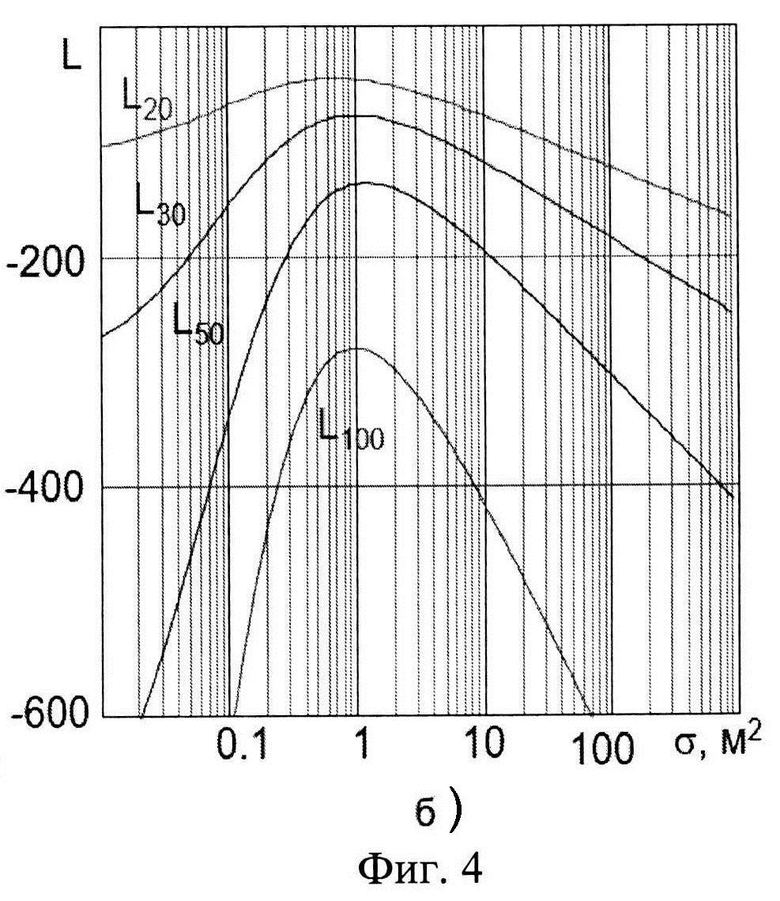
Способ оценки эффективной площади рассеяния (ЭПР) аэродинамической цели включает: облучение цели когерентным зондирующим сигналом с разрешением по дальности, априорно превышающим радиальный размер цели; когерентный прием и спектральный анализ эхо-сигналов цели в рабочем диапазоне дальностей; пороговое обнаружение и сопровождение цели по дальности и углу, автоматическое регулирование усиления приемника, обеспечивающее прием сигнала цели на сопровождаемой дальности в линейном режиме, при котором амплитуда сигнала цели на выходе приемника находится в расчетном динамическом диапазоне, независимом от дальности сопровождаемой цели; определение ширины спектра эхо-сигнала цели Δƒц, сравнение с полосой пропускания доплеровских фильтров спектроанализатора Δƒдф, если Δƒц больше Δƒдф, увеличение полосы пропускания доплеровских фильтров спектроанализатора до тех пор, пока наблюдаемый спектр цели не будет наблюдаться в одном доплеровском фильтре; оценку коэффициента усиления приемника kУi на сопровождаемой дальности R по известной зависимости коэффициента усиления приемника от напряжения регулировки, поступающего в приемник от системы автоматической регулировки усиления; оценку на каждом измерении  амплитуды сигнала цели с шумом xi; оценку в каждом i-м измерении мощности шума DШi на сопровождаемой дальности R через расчет усредненной оценки мощности шума по элементам разрешения дальность - доплеровская частота, свободных от сигнала цели; выдвижение гипотез о значении эффективной площади рассеяния (ЭПР) цели σj,
амплитуды сигнала цели с шумом xi; оценку в каждом i-м измерении мощности шума DШi на сопровождаемой дальности R через расчет усредненной оценки мощности шума по элементам разрешения дальность - доплеровская частота, свободных от сигнала цели; выдвижение гипотез о значении эффективной площади рассеяния (ЭПР) цели σj,  ; вычисление для каждой гипотезы j расчетной мощности сигнала цели на i-м измерении Dij по формуле
; вычисление для каждой гипотезы j расчетной мощности сигнала цели на i-м измерении Dij по формуле
где Ρ - мощность излучаемого сигнала,
G - коэффициент усиления антенны,
λ - длина волны излучаемого сигнала;
расчет для каждой информационной выборки амплитуды сигнала цели с шумом xi логарифма функционала правдоподобия Li(σj) гипотезы о ЭПР цели σj на сопровождаемой дальности R на i-м измерении, в дальнейшем называемом логарифмом функционала правдоподобия j-й гипотезы на i-м измерении; вычисление логарифмов функционала правдоподобия L(σj) для каждой j-й гипотезы о ЭПР цели σj по совокупности I независимых измерений

оценку ЭПР цели  по максимуму функционала правдоподобия L(σj) по формуле
по максимуму функционала правдоподобия L(σj) по формуле

отличающийся тем, что логарифм функционала правдоподобия j-й гипотезы на i-м измерении L(σj) для каждой информационной выборки амплитуды сигнала цели с шумом xi рассчитывают по формуле
где h - порог обнаружения сигнала цели.

