Изобретение относится к устройствам для транспортирования штучных грузов и может найти применение как средство межоперационного перемещения изделий, а также для транспортирования штучных грузов, при механизации погрузочных, разгрузочных и складских работ в различных отраслях народного хозяйства.
Известен роликовый конвейер с индивидуальным приводом роликов 1J.
Наличие индивидуального привода каждого ролика усложняет конструкцию конвейера и увеличивает его металлоемкость.
Наиболее близким техническим решением к предлагаемому является роликовый конвейер, включающий неподвижную раму, установленные на осях ролики, смонтированный на каждом ролике ведущий элемент и привод роликов с тяговым элементом (2
Недостатком известного конвейера является то, что он не обеспечивает измеиение направления движения и останов груза на нужном участке, что сужает его технологические возможности.
Цель изобретения - расширение технологических возможностей конвейера.
Указанная цель достигается тем, что в роликовом конвейере; включающем неподвижную раму, установленные на осях ролики, смонтированные на каждом ролике ведущий элемент и привод роликов с тяговым элементом, каждый ведущий элемент связан с обечайкой ролика при помощи управляемого механизма свободного хода, при этом тяговый элемент установлен с возможностью возвратно-поступательного перем.ещения, а каждый управляемый механизм свободного хода снабжен приводом его управления.
.При этом привод управления механизмом свободного хода выполнен в виде жестко закрепленных на ведущем элементе двух катушек электромагнита и установленной на (.тупице ведущего элемента с возможностью поворота вилки с жестко закрепленным на ней якорем, расположенным между катушками электромагнита.
Кроме того, механизм свободного хода выполнен в виде двустороннего роликового останова.
Механизм свободного хода может быть выполненным в виде двустороннего фрикционного останова.
На фиг. 1 изображен конвейер, вид сверху; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 3 с «прозрачной крышкой; на фиг. 5 - разрез Г-Г на фиг. 3 (сечение ролика с роликовым остановом); на фиг. 6 - то же (сечение ролика, с фрикционным остановом).
.Роликовый конвейер содержит неподвижную раму 1, на которой установлены ролики 2, тяговый орган 3 в виде цепи, натяжную 4, поддерживающие 5 и приводную 6 . звездочки, привод возвратно-поступательного движения цепи в виде электродвигаJ теля 7, редуктора с кривошипом 8, шатуна 9, установленного на раме качающегося зубчатого ceKfopa 10, который входит в зацепление с зубчатым колесом 11, сидящим на одной ступице с при,водной звездочкой. Ролик конвейера включает обечайку 12,
ведущий элемент в виде звездочки 13, которые установлены в подшипниках 14 на неподвижной оси 15 ролика. Ступица звездочки выполняет роль внутренней, а обечайка ролика - наружной обоймы остано, ва. Ролики или собачки 16 служат для передачи вращения от звездочки к обечайке. Прижатие их к обечайке обеспечивают пружины 17, управление остановом осуществляется вилкой 18, которая представляет собой диск с отогнутыми от него упорами, проходящими через прорези 19 в звездочке и взаимодействующими с роликами или собачками. Вилка свободно, поворачивается относительно ступицы звездочки и от осевого перемещения зафиксирована
, стопорным кольцом 20. К вилке неподвижно закреплен якорь 21. На крышке 22 останова, жестко закрепленной иа звездочке винтами, установлены катушки электромагнита 23. Ток к катушкам электромагнита от источника питания подводится через подводящие провода 24, уложенные в пазах 25 оси ролика, токосъемные кольца 26, закрепленные на оси ролика, щетки 27, установленные на ведущей звездочке, и провода 28, соединяющие щетки с катушками электромагнита.
Конвейер работает следующим образом.
Включается двигатель 7. Кривошип 8, . находящийся на выходном валу редуктора,
0 через шатун 9 приводит сектор 10 в колебательное движение. Сектор 10 через зубчатое колесо 11 сообщает возвратно-вращательное движение приводной звездочке 6, которая приводит тяговую цепь 3 в возвратно-поступательное движение. Цепь 3, пере мещаясь по направляющим звездочкам 5, сообщает возвратно-вращательное движение ведущим звездочкам 13. Для перемещения грузаВ нужном направлении от источника питания через подводящие провода 24, контактные кольца 26, щетки 27 и провод 28 в нужную катушку электромагнита 23 подается напряжение.Якорь 21, притягиваясь к катушке, поворачивает вилку 18, в результате чего одна пара роликов или собачка 16 еще больше отодвигается от
5 обечайки, а вторая входит с ней в соприкосновение, в.результате чего обечайка 12 ролика вращается вместе со звездочки 13 и сторону транспортирования.
При прямом ходе, т. е. когда звездоч.са вращается в сторону транспортирования, обечайка, вращаясь вместе с ней, за счет сил трения вовлекает груз в движение, в направлении транспортирования. При обратном вращении звездочки груз под действием силы инерции, преодолевая сопротивление качения по роликам и в их цапфах, продолжает,перемещаться в сторону Транспортирования, так как остановы не препятствукгг свободному вращению обечаек роликов в направлении транспортирования.
Для изменения направления транспортирования напряжения от исхточника питания аналогичным образом подается в другую катушку, якорь, притягиваясь к ней, поворачивает вилку в противоположное направление, в результате чего обечайка ролика получает возможность совместного вращения со звездочкой в противоположном направлении.
Для остановки груза катушки электромагнита обесточиваются. Под действием пружин 17- вилка 18 возвращается в нейтральное положение, отжимая ролики или
собачки 16 от обечайки 12 ролика, в результате чего ведущая звездочка 13 продолжает совершать возвратно-поступательное движение, а обечайка 12 ролика и находящийся на ней груз неподвижны.
Связь ведущего элемента с обечайкой ролика посредством управляемого механизма свободного хода и наличие привода управления механизмом свободного хода на каждом ролике позволяют через управляемый источник питания останавливать или изменять направление вращения любого ролика на конвейере, что значительно расширяет технологические возможности предлагаемого конвейера по сравнению с
известным. Подключение ЭВМ к управлению источником питания приводов управления механизмами свободного хода позволит выполнять запрограммированные транспортно-технологические операции. По своим технологическим возможностям предлагаемый роликовый конвейер равнозначен ро ликовым конвейерам с индивидуальным приводом роликов, сохраняя при этом все достоинства конвейеров с приводом от тягового элемента.

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| Инерционный конвейер для штучныхгРузОВ | 1979 |
|
SU818988A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Грузоведущий штанговый конвейер | 2002 |
|
RU2223904C1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Секция приводного роликового конвейера | 1988 |
|
SU1583329A1 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР | 2009 |
|
RU2406674C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |

1. РОЛИКОВЫЙ КОНВЕЙЕР, включающий неподвижную раму, установленные на осях ролики, смонтированный-на каждом ролике ведущий элемент и привод роликов с тяговым элементом, отличающийся тем, что, с целью расширения технологических возможностей конвейера, каждый ведущий элемент связан с обечайкрй ролика при помощи механизма свободного хода, при этим тяговый элемент установлен с возможностью возвратно-поступательного перемещення, а каждый механизм свободного хода снабжен приводом ,его управления.. 2.Конвейер по п. 1, отличающимися тем, что .привод управлений механизмом свободного хода выполнен в виде жестко закрепленных на ведущем элементе двух катушек электромагнита и установленной на ступнце ведущего элемента с возмож-. ностью поворота вилки с жестко закрепленным на ней якорем, расположенным между катущками электромагнита. 3.Конвейер по п. 1, отлычаюи4ийся тем, что механизм свободного хода выполнен в виде двустороннего роликового останова. (Л 4.Конвейер по п. 1, отличающийся тем, что механизм свободного хода выполнен в виде двустороннего фрикционного останова. 4 05 IvD 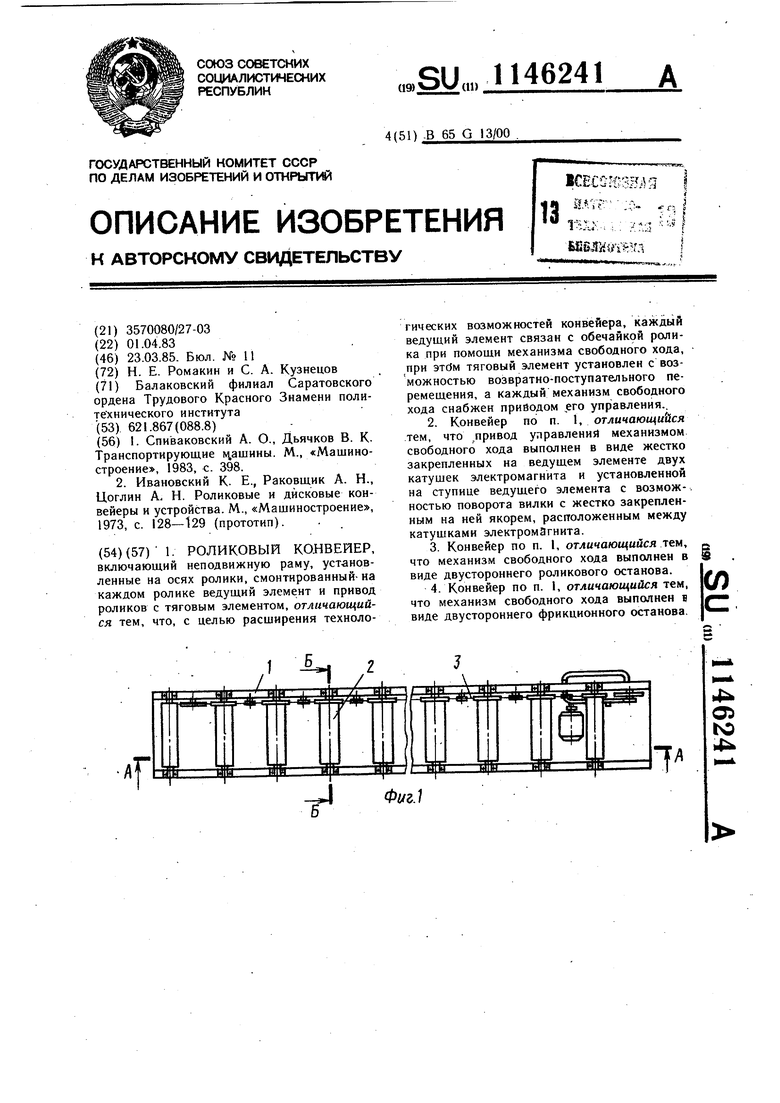
ФыгМ
/Z
Фиг,:5
77
.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спиваковский А | |||
| О., Дьячков В | |||
| К | |||
| Транспортирующие л ашины | |||
| М., «Машиностроение, 1983, с | |||
| Приспособление для выключения электрических цепей катодного генератора | 1922 |
|
SU398A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ивановский К | |||
| Е., Раковщик А | |||
| Н., Цоглин А, Н | |||
| Роликовые и дисковые конвейеры и устройства | |||
| М., «Машиностроение, 1973, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
