Изобретение относится к измерительной технике контроля балансировки или вибродиагностики при вращении ротора, в частности для железнодорожного транспорта при экспресс-измерениях динамических параметров колесных пар без снятия их с подвижного состава.
Известен способ и устройство для подъема, перемещения и кантования крупногабаритных цилиндрических объектов, имеющее тележку, подводимую под объект после его равномерного поднятия домкратами, сочлененными с тележкой. При этом рама тележки снабжена роликами и кольцами для упрощения кантования (авт. свид. СССР №802174, МКИ В 66 F 3/46. Подъемное устройство).
За прототип принято устройство для балансировки. Устройство имеет два полукомплекта. Каждый полукомплект имеет по четыре ролика. Два ролика установлены на подшипниках в средней части рамного корпуса. Два других ролика установлены на подшипниках на внешних сторонах торцов корпуса. Внешние ролики имеют опоры на направляющие поперечные относительно корпуса. Направляющие размещают на упорах. Концы вала ротора размещают на средних роликах. При возможном перекосе ротора внешние ролики проворачиваются, создавая наклон раме (авт. свид. СССР №58033, МКИ G 01 М 1 /04. Устройство для статической балансировки вращающихся деталей).
Способы применимы при обязательном обособлении ротора от остальной части конструкции, в частности от станины, привода или сочлененного с ним агрегата.
Целью изобретения является создание временной подвижной опоры ротора, позволяющей регулировать допустимую в рабочих пределах нагрузку на его штатные опоры вращения, исключая демонтаж, сочлененной с ротором кинематической системы.
Суть изобретения состоит в подъеме ротора за штатные опоры вращения, после чего создают несколько усилий, направленных центрально и встречно весу ротора, величину которых дозируют в зависимости от задаваемых ходовых зазоров в опорах вращения путем частичного опускания ротора.
Способ реализован двумя сборно-разборными полукомплектами в виде рам, содержащих Т-образные рычаги, каждый из которых взаимодействует с двумя направляющими, по две растяжки и быстроразъемный хомут, имеющий возможность сочленения с корпусом одного из домкратов, и двух пар роликов, закрепленных посредством планок и кронштейнов на направляющих.
Технический результат выражается в ускорении процесса периодических регламентных измерений отклонения параметров от нормы, вызывающих уменьшение ресурса работоспособности роторного узла.
Кинематическая схема устройства подъема и установки ротора со штатными опорами вращения для испытаний в упрощенном виде представлена на чертеже (одна из симметричных половин условно показана более полно). Особенностью конструкции является ее быстроразъемность на функциональные части.
Устройство имеет два полукомплекта, которые устанавливаются с разных сторон ротора 1 (колесной пары). Каждый полукомплект имеет домкрат 2, устанавливаемый под его штатные опоры вращения 3 (буксы), и сборно-разборную пространственную ферму с роликами 4. Ролики 4 попарно размещены относительно каждого торца ротора в нижней его части. Каждый ролик 4 установлен с возможностью вращения в вертикальной плоскости на кронштейне 5. Оси роликов пустотелые и снабжены внутренней резьбой. Кронштейн 5 имеет вертикальную стенку, соединенную с плоской горизонтальной опорой, к которой жестко закреплены по противоположным продольным кромкам ограничитель и направляющая 6, так что образуется желоб. Расстояние между ограничителем и направляющей, то есть ширина желоба, выбрана соответственно ширине балки (головки рельса; на чертеже условно не показаны), которая является опорой для роликов 4.
Направляющие 6 имеют продольное фасонное отверстие, например квадратное. В фасонные отверстия двух направляющих 6, размещенных в плоскости одного из торцов ротора, пропущены с возможностью соосного перемещения концы граненной штанги 7. С другой стороны ротора вдоль его торца и другой балки (рельса) размещена другая граненная штанга 7, аналогично сопряженная со второй парой направляющих 6. К средней части штанг 7 закреплены под прямым углом рычаги 8, другие концы которых снабжены быстроразъемными хомутами 9. Штанга 7 совместно с рычагом 8 образует Т-образный рычаг, являющийся основой грузонесущей рамы.
Быстроразъемные хомуты 9 сочленены с корпусами домкратов 2. Верхние концы штоков домкратов 2 снабжены захватами для опор вращения 3 (букс).
Неподвижная скоба быстроразъемного хомута 9 снабжена двумя шарнирами, размещенными по обе стороны от рычага 8. Шарниры хомута 9 соединены с растяжками 10. Другие концы растяжек 10 совместно с планкой 11 соединены быстроразъемными креплениями, например болтами, с осями соответствующей пары роликов 4. Растяжка выполнена регулируемой из двух частей, которые охвачены третьей, сочлененной с первыми фиксаторами, например резьбой. Планка 11с двумя растяжками 10 образуют шарнирный трехзвенник, одна из вершин которого соединена с рычагом 8. Рычаг 8 со штангой 7 и направляющими 6 образуют другой трехзвенник в горизонтальной плоскости (раму). Оба трехзвенника совместно образуют стабильную пространственную ферму, которая через ролики 4 взаимодействует с кромкой ротора 1.
Устройство транспортируется и хранится в частично разобранном состоянии. Сборку в рабочее состояние начинают с укладки кронштейнов 5 с роликами 4 рядом с торцами ротора 1 так, чтобы их направляющие 6 располагались с внешней стороны вдоль балки (рельса). После этого вводят в фасонные отверстия каждой пары направляющих 6 граненные концы штанг 7, так чтобы ролики 4 совместились с кромками ротора 1 и кронштейны 5 своими желобами соприкасались с балками (головками рельсов). При этом ограничители охватывают балки (головки рельсов) с внутренних сторон, направляющие 6 - с внешних сторон и рычаги 8 направлены вовне вдоль опор вращения 3 (букс).
Затем хомутами 9 охватывают корпуса домкратов 2. Верхние концы штоков домкратов 2 закрепляют захватами за опоры вращения 3 (буксы). Для точного совмещения верхних концов штоков домкратов 2 с опорами вращения 3 (буксами) кронштейны 5 предварительно придвигают к ротору 1 до соприкосновения с ним роликов 4 и совмещают рычаги 8 серединами штанг 7 с половиной расстояния между направляющими 6.
Домкратами 2 поднимают ротор 1, прикладывая усилие к его штатным опорам вращения 3. Подъем ротора 1 сопровождается перераспределением веса транспортного средства и усилий на другие его рессоры.
При подъеме между ротором 1 и балками (рельсами) образуется просвет, который позволяет встречно сместить кронштейны с роликами 4 до упора направляющих 6 друг в друга и соединить свободные концы растяжек 10 с отверстиями в планке 11 и осями роликов 4 посредством вворачивания болтов. Регулировкой растяжек 10 добиваются преднапряжения всех элементов полукомплекта. После этого ротор опускают на ролики.
Ротор 1 оказывается подвешенным на роликах 4, а его штатные опоры вращения подвешены на домкратах, тем самым в процессе сборки и установки полукомплектов устройства объект испытания взаимозависимо поднят в заданное положение.
После сборки каждого полукомплекта и подвешивания тем самым ротора устройство готово к работе. Разборку после измерений ведут в обратной последовательности, начиная с подъема ротора, так чтобы образовался зазор между ним и роликами.
Сборка и разборка необходимы, так как при испытании колесной пары без снятия ее с транспортного средства контакт колеса с рельсом в случае неразборной рамы препятствует закреплению кронштейнов 5 с роликами 4 с разных сторон относительно ротора.
Способ кроме особенностей сборки и разборки устройства предусматривает несколько режимов нагрузки опор вращения ротора. Так подъем ротора за его штатные опоры вращения вызывает нагрузку между деталями подшипника в нижнем его секторе, что противоположно любым рабочим нагрузкам. Частичное дозированное опускание ротора на ролики уменьшает нагрузку в штатных опорах вращения. При этом зазор в верхнем секторе уменьшается, а в нижнем секторе детали вращения получают некоторую свободу. Дальнейшее дозированное опускание полностью ликвидирует зазор в верхнем секторе и усилие может превысить рабочее, тогда как в нижнем секторе штатных опор вращения возможно появление сверхдопустимого ходового зазора. Поэтому принято ограничение усилий соответственно долям предела, равного 8-10% от эксплуатационной нагрузки.
Основу информации о ресурсе штатных опор вращения составляет характеристика в диапазоне рабочих нагрузок при вращении ротора. Следовательно, на каждом режиме нагрузки штатных опор вращения, создаваемом дозированными усилиями реакции роликов, направленными встречно весу ротора, его приводят во вращение, после чего выполняют измерения динамических параметров. При регламентных работах практически установлено, что при минимальных рабочих оборотах и ходовых зазорах в опорах вращения, начиная от равномерного до уменьшенного в верхнем их секторе, соответственного предельной доли равной 8-10% от эксплуатационной нагрузки, измеренные динамические параметры достоверно характеризуют ресурс и работоспособность штатных опор вращения ротора.
Способ и устройство его осуществления основаны на известных физических эффектах и не вызывают препятствий их реализации, в том числе сохраняя конструктивную целостность агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ НАКЛОНА ВАЛА РОТОРНОГО МЕХАНИЗМА | 2003 |
|
RU2253088C1 |
| СТЕНД ДИНАМИЧЕСКОГО КОНТРОЛЯ | 2002 |
|
RU2225601C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ РОТОРНЫХ МЕХАНИЗМОВ | 2004 |
|
RU2278365C2 |
| МНОГОФАКТОРНЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ РОТОРНЫХ, МЕХАНИЧЕСКИХ, ПОДШИПНИКОВЫХ И РЕДУКТОРНЫХ УЗЛОВ | 2004 |
|
RU2284021C2 |
| СПАСАТЕЛЬНАЯ СИСТЕМА С ВНЕШНЕЙ ПОДВЕСКОЙ К ЛЕТАТЕЛЬНОМУ АППАРАТУ | 2014 |
|
RU2563291C1 |
| ПЕРЕДВИЖНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ НИЖНИХ ПОВЕРХНОСТЕЙ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2325291C1 |
| Лестница для работы на контактной сети | 1990 |
|
SU1765339A1 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
Изобретение относится к измерительной технике. Сущность: поднимают ротор со штатными опорами вращения до образования промежутка между ротором и плоскостью его катания, и в таком положении закрепляют опоры вращения, затем в образованном промежутке дозированно создают центрально направленные встречно весу ротора усилия. Величину усилий выбирают соответственно долям предела, равного 8-10% от эксплуатационной нагрузки, в зависимости от режимов, при которых выставляют различные ходовые зазоры в опорах вращения от равномерных до уменьшенных в верхнем их секторе и приводят ротор во вращение. Устройство состоит из двух сборно-разборных полукомплектов, каждый из которых имеет две направляющие с роликами, двух грузонесущих рам и домкратов, четырех растяжек, двух планок, концы которых снабжены быстроразъемными креплениями, и четырех кронштейнов. Грузонесущая рама выполнена в виде Т-образного рычага, два противоположных плеча которого введены во взаимодействие с двумя направляющими с возможностью их относительного продольного перемещения, и на конце третьего плеча закреплены посредством шарниров две растяжки и быстроразъемный хомут, имеющий возможность сочленения с корпусом одного из домкратов. Ось каждого ролика выполнена с внутренней резьбой и закреплена посредством одного из кронштейнов с образованием желоба, имеющего возможность взаимодействия с балками, и посредством быстроразъемного крепления - с планкой и другим концом одной из растяжек, которые выполнены регулируемыми. Технический результат: ускорение процесса измерений. 2 н.п. ф-лы, 1 ил.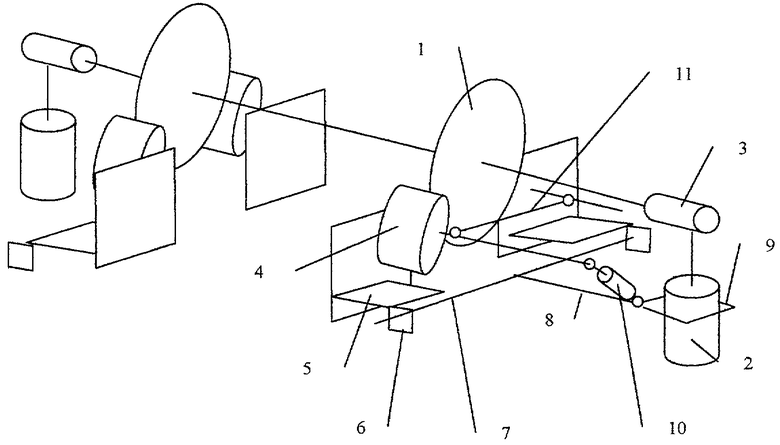
| Устройство для статической балансировки вращающихся деталей | 1939 |
|
SU58033A1 |
| RU 2001874 C1, 30.10.1993 | |||
| Подъемное устройство | 1978 |
|
SU802174A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2182322C1 |
| US 3452604, 01.07.1969. | |||

