Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам, обеспечивающим удобство и безопасность эксплуатации пассажирских подъемников, и может быть использовано в подъемниках, предназначенных для транспортировки инвалидов.
Известен подъемник, содержащий грузонесущую площадку, установленную с возможностью перемещения вдоль вертикальных направляющих и связанную с двигателем привода ее подъема кинематической цепью, включающей в себя передачу с гибкой связью, имеющей один гибкий тяговый элемент, огибающий закрепленный на грузонесущей площадке уравнивающий блок, ловители грузонесущей площадки, включающие в себя механизм включения ловителей и по меньшей мере два поворотных стопорных элемента ловителей, установленных на указанной площадке с возможностью ограниченного поворота в нерабочем положении и взаимодействия с направляющими в рабочем положении, при срабатывании ловителей, и связанных с механизмом включения ловителей, и средство для ограничения поворота указанных стопорных элементов (см. авторское свидетельство СССР №895877, кл. В 66 В 5/16, 1982 г.).
Однако известный подъемник недостаточно комфортен в пользовании и недостаточно удобен в эксплуатации. Указанные недостатки обусловлены тем, что при обрыве гибкого тягового элемента в любом случае срабатывают ловители, что снижает комфортность подъемника при перевозке людей. Комфортность известного подъемника может быть снижена и в результате возможного срабатывания ловителей при возможном повороте стопорных элементов ловителей под действием ускорений при трогании площадки с места и ее приближении к посадочной площадке, так как отсутствует специальное средство для ограничения их поворота в нерабочем положении. Кроме того, вследствие того, что между гибким тяговым органом и стопорными элементами расположен механизм, имеющий значительное количество звеньев, снижается надежность известного подъемника.
Известен подъемник, содержащий грузонесущую площадку, установленную с возможностью перемещения вдоль вертикальных направляющих и связанную с двигателем привода ее подъема кинематической цепью, включающей в себя передачу с гибкой связью, имеющей один гибкий тяговый элемент, ловители грузонесущей площадки, включающие в себя механизм включения ловителей и по меньшей мере два соединенных валом поворотных стопорных элемента ловителей, установленных на указанной площадке с возможностью ограниченного поворота и взаимодействия с направляющими в рабочем положении и связанных с механизмом включения ловителей, и средство для ограничения поворота указанных стопорных элементов в нерабочем положении, включающее в себя резьбовое соединение и пружину (см. Галиченко А.Н., Гехт А.Х. Строительные подъемники, М.: Высшая школа, 1975 г., стр.52-54, рис.36).
Однако известный подъемник недостаточно комфортен в пользовании и недостаточно удобен в эксплуатации. Указанные недостатки обусловлены тем, что при обрыве гибкого тягового элемента в любом случае срабатывают ловители, что снижает комфортность подъемника при перевозке людей. Комфортность известного подъемника может быть снижена и в результате возможного срабатывания ловителей при увеличении высоты пружины в процессе эксплуатации и приближении вследствие этого стопорных элементов к направляющей. Вследствие необходимости частого регулирования высоты пружины снижается удобство эксплуатации известного подъемника.
Наиболее близким к заявленному изобретению по совокупности существенных признаков, по технической сущности и достигаемому результату является подъемник, содержащий грузонесущую площадку, установленную с возможностью перемещения вдоль вертикальных направляющих и связанную с двигателем привода ее подъема кинематической цепью, включающей в себя передачу с гибкой связью, имеющей по меньшей мере два гибких тяговых элемента, ловители грузонесущей площадки, включающие в себя механизм включения ловителей и по меньшей мере два поворотных стопорных элемента ловителей, установленных на указанной площадке с возможностью ограниченного поворота и взаимодействия с направляющими в рабочем положении и связанных с механизмом включения ловителей, и средство для ограничения поворота указанных стопорных элементов в нерабочем положении (см. Чутчиков П.И. Ремонт лифтов. М.: Стройиздат, 1983 г., стр.84-86, рис.55).
Однако указанный известный подъемник недостаточно комфортен в пользовании и недостаточно удобен в эксплуатации. Указанные недостатки обусловлены тем, что, несмотря на наличие нескольких гибких тяговых элементов, при обрыве одного гибкого тягового элемента в любом случае срабатывают ловители, что снижает комфортность указанного известного подъемника при перевозке людей. Комфортность указанного известного подъемника может быть снижена и в результате возможного срабатывания ловителей при увеличении длины гибкого элемента, содержащегося в средстве для ограничения поворота стопорных элементов, в процессе эксплуатации и приближении вследствие этого стопорных элементов к направляющей. Вследствие необходимости частого регулирования длины указанного гибкого элемента снижается удобство эксплуатации указанного известного подъемника.
Изобретение направлено на достижение технического результата, заключающегося в обеспечении возможности эксплуатации подъемника при обрыве одного из гибких тяговых элементов, что повысит комфортность подъемника.
Указанный технический результат достигается тем, что в подъемнике, содержащем грузонесущую площадку, установленную с возможностью перемещения вдоль вертикальных направляющих и связанную с двигателем привода ее подъема кинематической цепью, включающей в себя передачу с гибкой связью, имеющей по меньшей мере два гибких тяговых элемента, ловители грузонесущей площадки, включающие в себя механизм включения ловителей и по меньшей мере два поворотных стопорных элемента ловителей, установленных на указанной площадке с возможностью ограниченного поворота и взаимодействия с направляющими в рабочем положении и связанных с механизмом включения ловителей, и средство для ограничения поворота указанных стопорных элементов в нерабочем положении (далее подъемник, характеризующийся данной совокупностью признаков, в описании будет называться "указанный известный подъемник"), упомянутая кинематическая цепь включает в себя двуплечий поворотный рычаг-балансир, установленный на грузонесущей площадке, а каждый упомянутый гибкий тяговый элемент одним концом неподвижно соединен с одним из плеч указанного поворотного рычага-балансира, поворотные стопорные элементы ловителей выполнены в виде двуплечих рычагов, первые плечи которых предназначены для взаимодействия с направляющими грузонесущей площадки, вторые плечи соединены между собой пружиной и снабжены роликами, а механизм включения ловителей образован двумя гибкими элементами, каждый из которых огибает оба указанных ролика и одним концом соединен с одним из гибких тяговых элементов, а другим - непосредственно с грузонесущей площадкой, а также упомянутой пружиной, а также тем, что средство для ограничения поворота стопорных элементов ловителей может быть выполнено в виде закрепленных на грузонесущей площадке упоров, взаимодействующих со вторыми плечами поворотных стопорных элементов ловителей. За счет этого в подъемнике при обрыве одного гибкого тягового элемента один из гибких элементов механизма включения ловителей удерживает от поворота и взаимодействия с направляющими стопорные элементы ловителей, что позволяет с необходимым комфортом доставить пассажира до посадочной площадки. Кроме того, благодаря тому, что указанный известный подъемник снабжен по меньшей мере одним концевым выключателем, установленным на грузонесущей площадке с возможностью взаимодействия с одним из плеч поворотного рычага-балансира и связанным со средством для сигнализации об обрыве гибкого тягового элемента, достигается технический результат: обеспечение возможности дистанционного контроля за обрывом гибких тяговых элементов, за счет чего повышается удобство эксплуатации подъемника.
Кроме того, благодаря тому, что указанный известный подъемник содержит по меньшей мере два блока, связанных с упомянутым двигателем привода, контактирующих с упомянутыми гибкими тяговыми элементами и установленными по разные стороны оси, по отношению к которой симметрично расположены вертикальные направляющие грузонесущей площадки, обеспечивается возможность максимально приблизить поворотные стопорные элементы ловителей к направляющим и исключить использование применения дополнительных передаточных элементов между ними и гибкими тяговыми элементами и за счет этого повысить надежность подъемника.
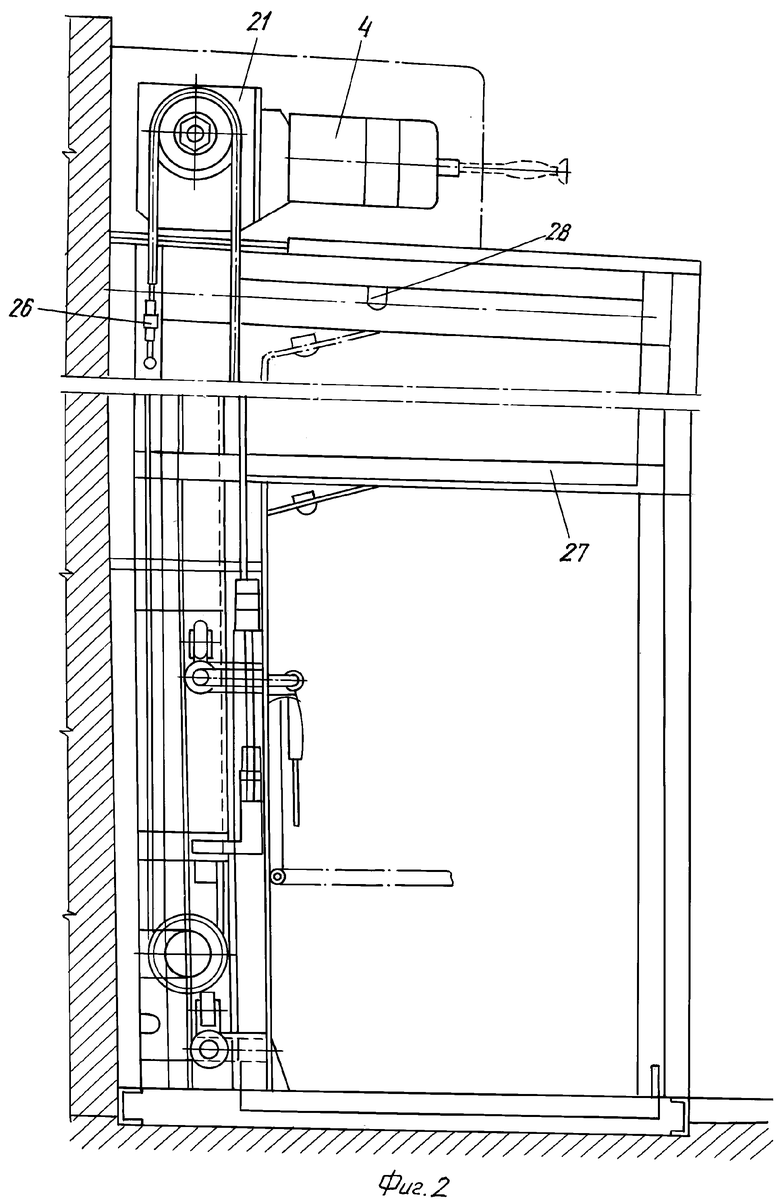
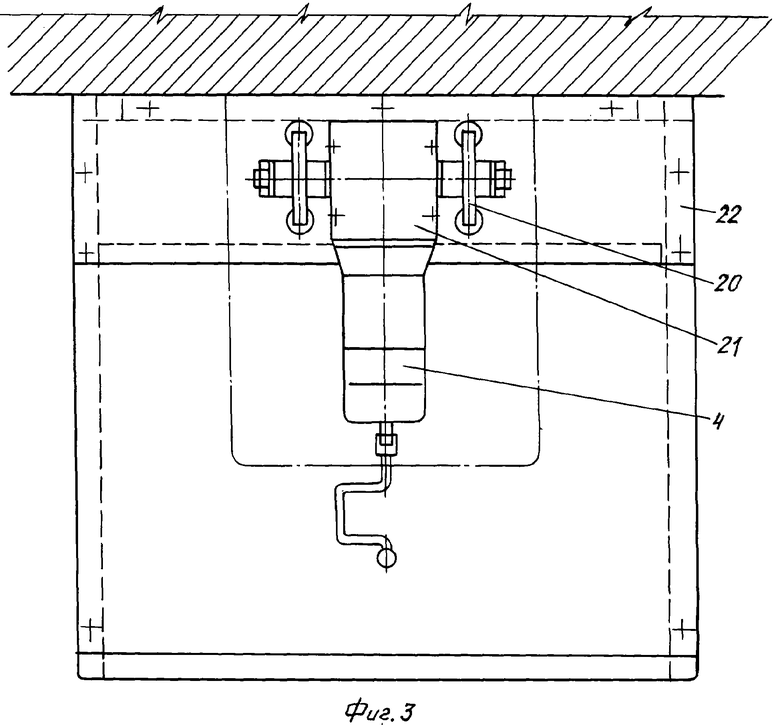
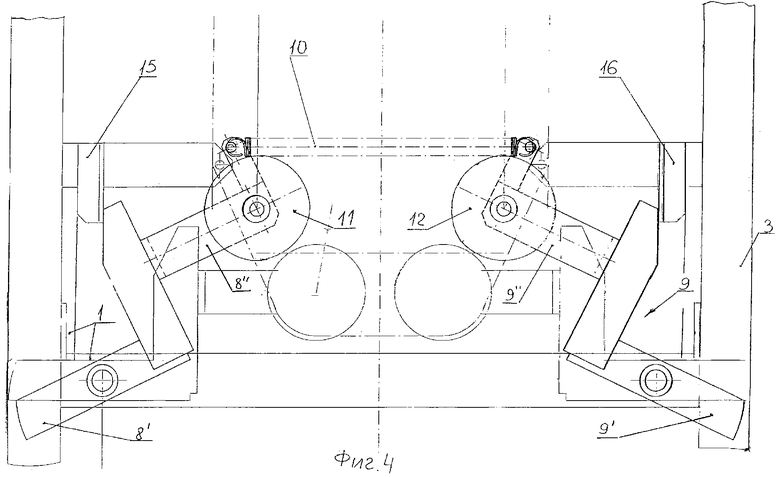
На фиг.1 изображен общий вид подъемника; на фиг.2 - то же, вид сбоку; на фиг.3 - то же, вид сверху; на фиг.4 - местный вид I на фиг.1.
Подъемник содержит грузонесущую площадку 1, установленную с возможностью перемещения вдоль вертикальных направляющих 2, 3 и связанную с двигателем (электродвигателем 4) привода ее подъема кинематической цепью, включающей в себя передачу с гибкой связью, имеющей два гибких тяговых элемента 5, 6. Подъемник содержит также ловители грузонесущей площадки 1, включающие в себя механизм включения ловителей и два поворотных стопорных элемента ловителей, установленных на площадке 1 с возможностью ограниченного поворота и взаимодействия с направляющими в рабочем положении и связанных с механизмом включения ловителей, и средство для ограничения поворота указанных стопорных элементов в нерабочем положении. Указанная кинематическая цепь включает в себя двуплечий поворотный рычаг-балансир 7, установленный на грузонесущей площадке 1, а каждый гибкий тяговый элемент 5, 6 одним концом неподвижно соединен с одним из плеч поворотного рычага-балансира 7 (фиг.1). Поворотные стопорные элементы ловителей выполнены в виде повортных двуплечих рычагов 8, 9, первые плечи 8', 9' которых предназначены для взаимодействия с направляющими 2, 3 грузонесущей площадки 1, вторые плечи соединены между собой стяжной пружиной 10 и снабжены двухручьевыми (не показано) роликами 11, 12. Механизм включения ловителей образован двумя гибкими элементами 13, 14, каждый из которых огибает оба ролика 11, 12 и одним концом соединен с одним из гибких тяговых элементов 5, 6, а другим - непосредственно с грузонесущей площадкой 1, а также пружиной 10.
Средство для ограничения поворота стопорных элементов ловителей выполнено в виде закрепленных на грузонесущей площадке 1 упоров 15, 16, взаимодействующих со вторыми плечами 8'', 9'' поворотных стопорных элементов ловителей - двуплечих рычагов 8, 9 (фиг.1, 4).
Подъемник снабжен концевыми выключателями 17, 18, установленными на грузонесущей площадке 1 с возможностью взаимодействия с одним из плеч поворотного рычага-балансира и связанными известным образом со средством для сигнализации об обрыве гибкого тягового элемента - цепью питания сигнальной лампочки (не показана), установленной на каркасе подъемника.
Подъемник содержит два блока 19, 20, связанных с электродвигателем 4 привода через редуктор 21, на выходных валах которого они установлены. Редуктор 21 установлен между указанными блоками на каркасе 22 подъемника, с которым неподвижно соединены направляющие 2, 3. Блоки 19, 20 контактируют с огибающими их гибкими тяговыми элементами 5, 6 и установлены по разные стороны оси 23 (оси симметрии), по отношению к которой симметрично расположены вертикальные направляющие 2, 3 грузонесущей площадки 1. Блоки 19, 20 выполнены в виде звездочек. Гибкие тяговые элементы 5, 6 выполнены составными - состоящими из цепей 5', 6', огибающих указанные звездочки, и тросов 5'', 6'', огибающих блоки 24, 25. Цепи 5', 6' одними концами соединены при помощи известного соединения 26 с тросами 5'', 6'', а другими посредством балансира 7 соединены с грузонесущей площадкой 1. Тросы 5'', 6'', в свою очередь, также неподвижно соединены другими концами с грузонесущей площадкой 1. Грузонесущая площадка 1 снабжена неподвижно соединенным с ней козырьком 27. На каркасе 22 установлена лампочка 28 освещения.
Подъемник работает следующим образом.
При включении электродвигателя 4 приводятся во вращение блоки 19, 20 (звездочки). При этом движение от указанных звездочек через гибкие тяговые элементы 5, 6 передается грузонесущей площадке 1, которая на роликах 29 перемещается по направляющим 2, 3, поднимаясь с находящимся на ней пассажиром до посадочной площадки 29. При этом гибкие элементы 13, 14 удерживают стопорные элементы - двуплечие рычаги 8, 9 от поворота и взаимодействия с направляющими, а упоры поддерживают указанные рычаги на таком расстоянии от направляющих, которое обеспечивает быстрое срабатывание ловителей при обрыве обоих гибких тяговых элементов и гарантирует от произвольного срабатывания ловителей под действием ускорений. При обрыве одного гибкого тягового элемента 5 гибкий элемент 13, соединенный с гибким тяговым элементом 6, охватывая ролики 11, 12, продолжает удерживать от поворота под действием усилия стяжной пружины 10 стопорные элементы - двуплечие рычаги 8, 9. При этом поворачивается балансир 7, взаимодействуя с конечным выключателем 18, который замыкает цепь питания сигнальной лампочки, загорание которой оповещает обслуживающий персонал о необходимости замены одного из гибких тяговых элементов. Таким образом, при обрыве одного гибкого тягового элемента один из гибких элементов механизма включения ловителей удерживает от поворота и взаимодействия с направляющими стопорные элементы ловителей, что позволяет с необходимым комфортом доставить пассажира до посадочной площадки 30. При обрыве обоих гибких тяговых элементов стопорные элементы ловителей - двуплечие рычаги 8, 9 входят во взаимодействие с направляющими 2, 3 под действием усилия стяжной пружины 10 (на фиг.4 показано тонкими линиями), фиксируя грузонесущую площадку 1 на направляющих 2, 3, то есть ловители срабатывают лишь при обрыве обоих гибких тяговых элементов (органов), что случается очень редко. Таким образом, эвакуация пассажиров с грузонесущей площадки после срабатывания ловителей в предлагаемом подъемнике производится реже, чем в указанном известном подъемнике, что позволяет повысить комфортность предлагаемого подъемника по сравнению с известным. При обслуживании подъемника рабочий может стоять на козырьке 27.
Таким образом, использование изобретения позволит повысить комфортность пассажирских подъемников, повысит их надежность и удобство в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| ПОДЪЕМНИК | 1996 |
|
RU2094355C1 |
| Подвеска кабины лифта | 1977 |
|
SU734119A1 |
| Ловитель для грузоподъемных механизмов | 1986 |
|
SU1337333A1 |
| ПОДЪЕМНИК ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ВЕРТИКАЛЬНО УСТАНОВЛЕННОГО ОБЪЕКТА | 1992 |
|
RU2026252C1 |
| Подъемник | 1990 |
|
SU1765091A2 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к пассажирским подъемникам, например, для транспортировки инвалидов. Согласно изобретению на грузонесущей площадке установлен двуплечий поворотный рычаг-балансир. Каждый гибкий тяговый элемент, связанный с двигателем привода подъема грузонесущей площадки, одним концом неподвижно соединен с одним из плеч указанного поворотного рычага-балансира Поворотные стопорные элементы ловителей выполнены в виде двуплечих рычагов, первые плечи которых предназначены для взаимодействия с направляющими грузонесущей площадки, вторые плечи соединены между собой пружиной и снабжены роликами. Механизм включения ловителей образован двумя гибкими элементами, каждый из которых огибает оба указанных ролика и одним концом соединен с одним из гибких тяговых элементов, а другим - непосредственно с грузонесущей площадкой, а также упомянутой пружиной. Изобретение позволяет повысить удобство эксплуатации подъемника. 2 з.п. ф-лы, 4 ил.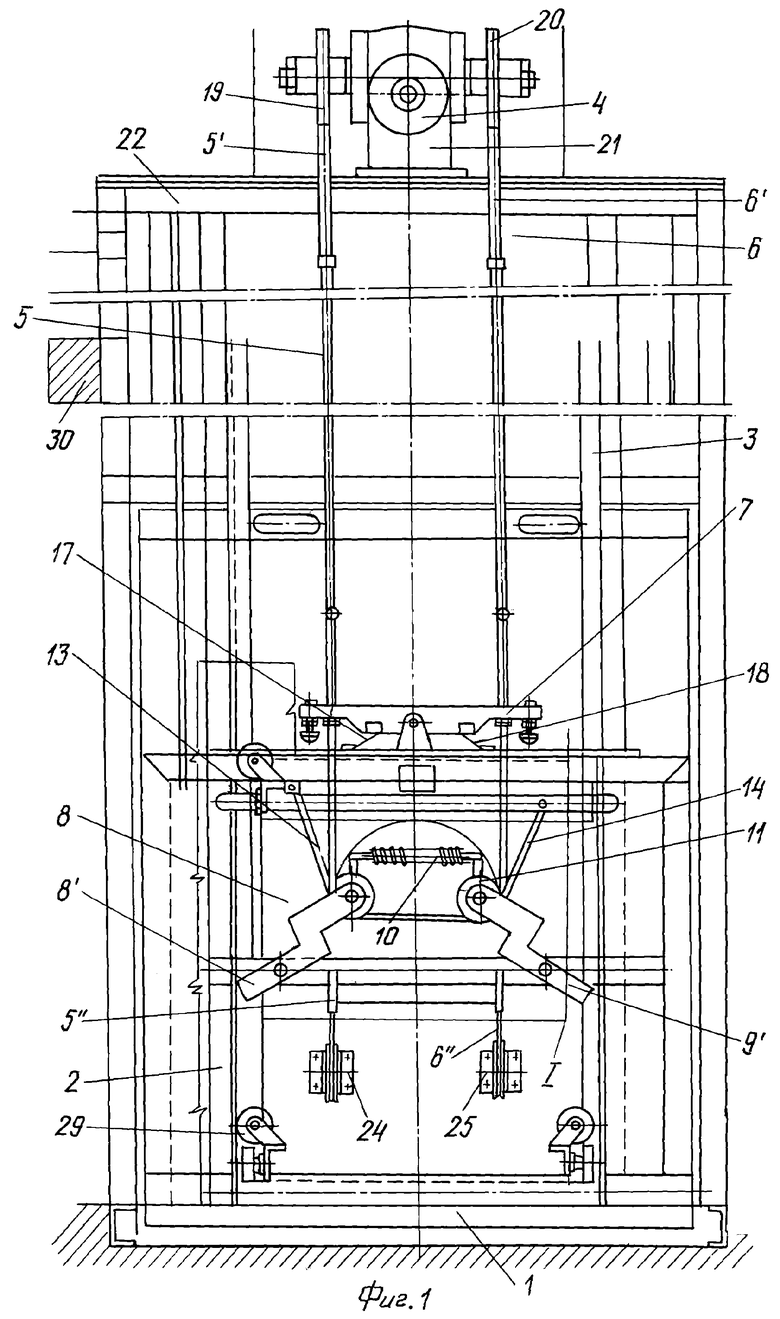
| US 5230406 А, 27.07.1993 | |||
| НАХОВ Б.С., СКРИПКА Б.Ф | |||
| МОНТАЖ, НАЛАДКА И ЭКСПЛУАТАЦИЯ ЛИФТОВ | |||
| М.: ИЗДАТЕЛЬСТВО ПО СТРОИТЕЛЬСТВУ, 1973, с.50-54 | |||
| Подвеска кабины лифта | 1976 |
|
SU591383A1 |

