Изобретение относится к робототехнике с системами автоматического управления и может быть использовано при ориентации груза относительно объекта для его последующего закрепления.
Известно устройство управления объектом регулирования, содержащее задатчик управляющего воздействия, элементы сравнения, привод, датчик положения, блок выделения модуля, блок деления, задатчик уставок и ключ (авторское свидетельство СССР №1465302, кл. В 25 J 9/16, 13/00, 1989).
Недостатком этого устройства является формирование управляющего воздействия до начала его работы, что является весьма проблематичным.
Наиболее близким аналогом (прототипом) является устройство для управления копирующим манипулятором, содержащее задающий орган, датчик нагрузки, редуктор, двигатели, усилители, датчики положения, сумматоры, датчик скорости, пороговые элементы, элементы ИЛИ-НЕ, блоки выделения знака, элементы НЕ, элементы И, элементы ИЛИ, коммутаторы, исполнительный механизм и нагрузку (авторское свидетельство СССР №1262447, кл. G 05 В 11/00, 1986).
Недостаток этого устройства проявляется в том, что оно обеспечивает копирующее управление при отсутствии самонаведения. Это создает неудобство эксплуатации и низкое быстродействие.
Техническим результатом заявленного изобретения является повышение быстродействия и удобства эксплуатации. Это можно осуществить путем реализации двух алгоритмов: алгоритма подъема (опускания) и алгоритма ориентации (вращения и горизонтального перемещения) закрепляемого груза относительно объекта.
Алгоритм подъема (опускания) отрабатывается следующим образом. После выделения фрагмента изображения поверхности объекта из телевизионного сигнала происходит суммирование всех элементов обрабатываемого изображения и вычисляется площадь его черного фрагмента Sфраг:

где m - количество строк,
n - количество элементов в строке,
bij - i-ый элемент в j-ой строке изображения.
Площадь черного фрагмента характеризует высоту расположения груза относительно объекта.
Если элемент bij черный, то bij=1, если нет, то bij=0. Чернота элемента определяется с помощью видеоконтроллера, расположенного на телекамере.
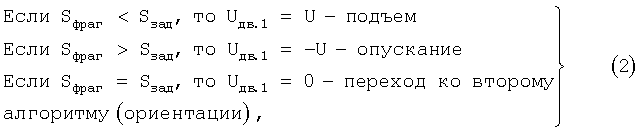
где Sзад - заданная площадь изображения поверхности объекта;
Uдв.1 - напряжение для привода первого двигателя, который работает на подъем (Uдв.1=U) или опускание (Uдв.1=-U);
U - постоянный сигнал определенного уровня, например 27 вольт.
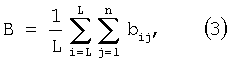
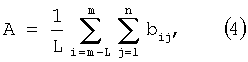
Алгоритм ориентации (вращения и горизонтального перемещения) отрабатывается следующим образом. В массиве элементов bij выделяется L строк в начале и в конце и считывается среднее количество черных элементов А и В в этих частях массива:
Критерий ϕ выбора двигателя (он может быть вращательным или горизонтального перемещения) имеет следующий вид:

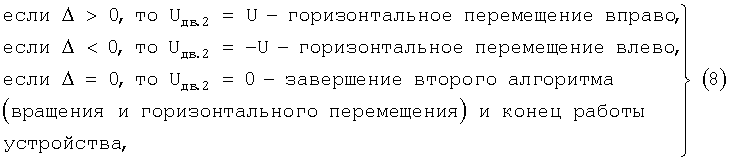
Критерий Δ горизонтального перемещения груза определяется из выражения:

где Взад - заданное количество черных элементов в начале массива.
Выбор двигателя происходит в следующей последовательности:

где Uдв.3 - напряжение для привода третьего двигателя, который работает на вращение.
где Uдв.2 - напряжение для привода второго двигателя, который работает на горизонтальное перемещение.
Аналогично выполняются операции по устранению ошибки углового положения по оси Х (вперед-назад) и вокруг оси Z (угол тангажа). Таким образом, осуществляется процесс ориентации груза относительно объекта для его последующего закрепления.
Технический результат достигается тем, что устройство для выбора управляющих воздействий, содержащее с первого по четвертый элементы И, с первого по третий элементы НЕ, с первого по четвертый пороговые элементы, причем выход первого элемента НЕ соединен с первым входом первого элемента И, а выход второго элемента НЕ подключен к первому входу второго элемента И, дополнительно содержит с первого по третий блоки входных регистров, выполненные в виде матриц, с первого по четвертый входные регистры, с первого по третий блоки сумматоров с накоплением, с первого по третий сумматоры с накоплением, с первого по третий блоки вычитания, с первого по третий блоки деления, первый и второй блоки сравнения, с первого по четвертый элементы задержки, пятый и шестой элементы И, блок индикации, генератор тактовых импульсов и распределитель импульсов, вход которого соединен с выходом генератора тактовых импульсов, первый выход распределителя импульсов - с входами записи каждого регистра первого, второго и третьего блоков входных регистров, второй выход - с входами записи первого, второго, третьего и четвертого входных регистров, третий выход - с входами считывания каждого регистра первого, второго и третьего блоков входных регистров, четвертый выход - с входами считывания второго и третьего входных регистров, пятый выход - с входом считывания первого входного регистра, шестой выход - с входом считывания четвертого входного регистра, седьмой выход - со вторыми входами первого и третьего элементов И, выходы которых являются соответственно первым и вторым выходами устройства, информационные входы каждого регистра первого блока входных регистров являются входами первой группы входов устройства, а выходы каждой строки матрицы этих регистров соединены с первого по n-ый входами соответствующего сумматора с накоплением первого блока сумматоров с накоплением, выход каждого из которых соединен соответственно с первого по m-ый входами первого сумматора с накоплением, выход которого подключен к первым входам первого и второго блоков сравнения, выход первого из которых соединен с первым входом третьего элемента И и входом первого элемента НЕ, а выход второго блока сравнения - с входом второго элемента задержки, выход которого подключен ко второму входу второго элемента И, выход которого является третьим выходом устройства, информационные входы каждого регистра второго блока входных регистров являются входами второй группы входов устройства, а выходы каждой строки матрицы этих регистров соединены с первого по n-ый входами соответствующего сумматора с накоплением второго блока сумматоров с накоплением, выход каждого из которых соединен соответственно с первого по L-ый входами второго сумматора с накоплением, выход которого подключен к первому входу первого блока деления, выход которого соединен с первыми входами первого и второго блоков вычитания, выходы которых подключены соответственно к первому входу второго блока деления и к входу второго порогового элемента, выход которого соединен с входом третьего элемента задержки, выход которого подключен к входу второго элемента НЕ и к первому входу четвертого элемента И, выход которого является четвертым выходом устройства, информационные входы каждого регистра третьего блока входных регистров являются входами третьей группы входов устройства, а выходы каждой строки матрицы этих регистров соединены с первого по n-ый входами соответствующего сумматора с накоплением третьего блока сумматоров с накоплением, выход каждого из которых соединен соответственно с первого по L-ый входами третьего сумматора с накоплением, выход которого подключен к первому входу третьего блока деления, выход которого соединен со вторым входом первого блока вычитания, информационный вход первого входного регистра является первым входом устройства, а выход подключен ко вторым входам первого и второго блоков сравнения, информационный вход второго входного регистра является вторым входом устройства, а выход соединен со вторыми входами первого и третьего блоков деления, а также с первым входом третьего блока вычитания, выход которого подключен к входу первого элемента задержки, выход которого соединен со вторым входом второго блока деления, выход которого подключен к входам третьего и четвертого пороговых элементов, информационные входы третьего и четвертого входных регистров являются соответственно третьим и четвертым входами устройства, а выходы соединены со вторыми входами соответственно третьего и второго блоков вычитания, выход третьего порогового элемента подключен к входу третьего элемента НЕ и к первому входу пятого элемента И, второй вход которого соединен с выходом второго элемента задержки, а выход является пятым выходом устройства, выход четвертого порогового элемента подключен ко второму входу четвертого элемента И и к первому входу шестого элемента И, второй вход которого соединен с выходом второго элемента НЕ, а выход является шестым выходом устройства, выход второго блока вычитания подключен также к входу второго порогового элемента, выход которого через четвертый элемент задержки соединен с входом блока индикации.
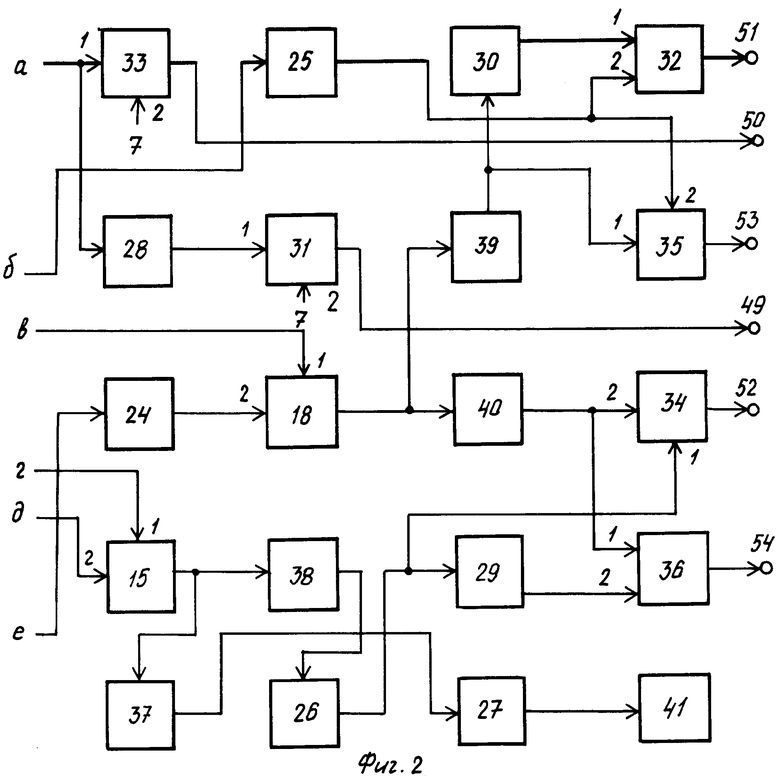
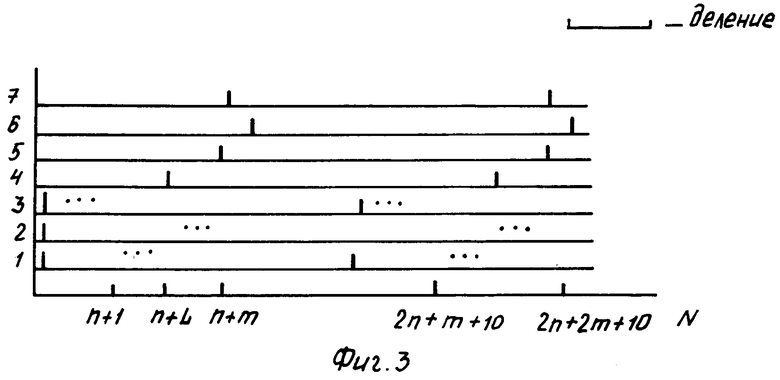
На фиг.1 и 2 представлена функциональная схема устройства (для ликвидации громоздкости связи между распределителем импульсов и управляющими входами соответствующих блоков показаны не полностью, а обозначены путем нумерации входов и выходов); на фиг.3 изображена циклограмма работы устройства для выбора управляющих воздействий (по оси ординат обозначены номера выходов распределителя импульсов, а по оси абсцисс - число тактов, причем длительности операций сложения и вычитания приняты за один такт, длительность операции деления приведена (16 тактов) справа).
Устройство для выбора управляющих воздействий (фиг.1 и 2) содержит первый 1, второй 2 и третий 3 блоки входных регистров в виде матриц размерностью соответственно m×n, L×n, L×n, первый 4, второй 5, третий 6 и четвертый 7 входные регистры, первый 8, второй 9 и третий 10 блоки сумматоров с накоплением, состоящие соответственно из m, L и L элементов, первый 11, второй 12 и третий 13 сумматоры с накоплением, первый 14, второй 15 и третий 16 блоки вычитания, первый 17, второй 18 и третий 19 блоки деления, первый 20 и второй 21 блоки сравнения, генератор 22 тактовых импульсов, распределитель 23 импульсов, первый 24, второй 25, третий 26 и четвертый 27 элементы задержки, первый 28, второй 29 и третий 30 элементы НЕ, первый 31, второй 32, третий 33, четвертый 34, пятый 35 и шестой 36 элементы И, первый 37, второй 38, третий 39 и четвертый 40 пороговые элементы, блок 41 индикации, первую 42, вторую 43 и третью 44 группы входов устройства, первый 45, второй 46, третий 47 и четвертый 48 входы устройства, первый 49, второй 50, третий 51, четвертый 52, пятый 53 и шестой 54 выходы устройства.
Устройство для выбора управляющих воздействий работает следующим образом. С первой группы входов 42 устройства элементы bij фрагмента изображения поверхности объекта подаются на информационные входы элементов первого блока 1 входных регистров (фиг.1, 2). Со второй группы входов 43 устройства элементы bij из L строк в начале фрагмента поступают на информационные входы элементов второго блока 2 входных регистров. С третьей группы входов 44 устройства элементы bij из L строк в конце фрагмента направляются на информационные входы элементов третьего блока 3 входных регистров. При этом управляющие сигналы на входы записи всех указанных элементов поступают с первого выхода распределителя 23 импульсов. Темп работы устройства задается генератором 22 тактовых импульсов.
С первого входа 45 устройства величина заданной площади Sзад изображения поверхности объекта подается на информационный вход первого входного регистра 4. Со второго входа 46 устройства величина L поступает на информационный вход второго входного регистра 5. С третьего входа 47 устройства значение m количества строк направляется на информационный вход третьего входного регистра 6. С четвертого входа 48 устройства величина заданного количества Взад черных элементов в начале массива, характеризующего Sфраг, подается на информационный вход четвертого входного регистра 7. При этом управляющие сигналы на входы записи всех указанных регистров поступают со второго выхода распределителя 23 импульсов.
По управляющему сигналу с третьего выхода распределителя 23 импульсов на входы считывания всех элементов первого 1, второго 2 и третьего 3 блоков входных регистров с выходов этих элементов величины bij направляются на входы соответственно первого 8, второго 9 и третьего 10 блоков сумматоров с накоплением. С выходов этих сумматоров значения  подаются на входы соответственно первого 11, второго 12 и третьего 13 сумматоров с накоплением. С выхода первого сумматора 11 с накоплением величина Sфраг определяется по формуле (1), засылается на первые входы первого 20 и второго 21 блоков сравнения. С выходов второго 12 и третьего 13 сумматоров с накоплением значения
подаются на входы соответственно первого 11, второго 12 и третьего 13 сумматоров с накоплением. С выхода первого сумматора 11 с накоплением величина Sфраг определяется по формуле (1), засылается на первые входы первого 20 и второго 21 блоков сравнения. С выходов второго 12 и третьего 13 сумматоров с накоплением значения  и
и  направляются на первые входы соответственно первого 17 и третьего 19 блоков деления.
направляются на первые входы соответственно первого 17 и третьего 19 блоков деления.
С четвертого выхода распределителя 23 импульсов управляющий сигнал подается на входы считывания второго 5 и третьего 6 входных регистров. С выхода второго входного регистра величина L направляется на вторые входы первого 17 и третьего 19 блоков деления, а также на первый вход третьего блока 16 вычитания. С выхода блока 16 значение m-L засылается на вход первого элемента задержки 24. С выхода первого блока 17 деления величина В, определяемая по формуле (3), подается на первые входы первого 14 и второго 15 блоков вычитания. С выхода третьего блока 19 деления значение А, оцениваемое по формуле (4), направляется на второй вход первого блока 14 вычитания, с выхода которого величина В-А засылается на первый вход второго блока 18 деления, на второй вход которого с выхода первого элемента задержки 34 направляется значение m-L.
По управляющему сигналу с пятого выхода распределителя 23 импульсов на вход считывания первого входного регистра 4 с его выхода величина Sзад подается на вторые входы первого 20 и второго 21 блоков сравнения. Эти блоки настроены в соответствии с соотношениями (2) следующим образом: если Sфраг<Sзад, то на выходе блока 20 будет 1, если Sфраг>Sзад, то на выходе этого блока 0. В случае, когда Sфраг=Sзад, на выходе блока 21 будет 1, в других случаях на выходе этого блока будет 0. Следовательно, если Sфраг<Sзад, то на выходе третьего элемента И 33 благодаря управляющему сигналу с седьмого выхода распределителя 23 импульсов будет сигнал, который со второго выхода 50 устройства подается на источник напряжения, обеспечивающий подъем груза относительно объекта (Uдв.1=U).
В случае, когда Sфраг>Sзад, на выходе первого элемента И 31 благодаря наличию первого элемента НЕ 28 и управляющему сигналу с седьмого выхода распределителя 23 импульсов появится сигнал, который с первого выхода 49 устройства будет подаваться на источник напряжения, обеспечивающий опускание груза относительно объекта (Uдв.1=-U). Если Sфраг=Sзад, то на вторые входы второго 32 и пятого 35 элементов И через второй элемент задержки 25 с выхода второго блока 21 сравнения будет направляться сигнал для осуществления перехода к вращению.
С выхода второго блока 18 деления величина ϕ, определяемая по формуле (5), засылается на входы третьего 39 и четвертого 40 пороговых элементов, в которых постоянно «зашит» уровень сравнения. Эти элементы настроены в соответствии с соотношениями (7) следующим образом: если ϕ>0, то на выходе элемента 39 будет 1, если ϕ<0, то на выходе этого элемента - 0. В случае, когда ϕ=0, на выходе элемента 40 будет 1, в других случаях на выходе этого элемента - 0. Значит, если ϕ>0, то на выходе пятого элемента И 35 благодаря наличию сигнала с выхода второго элемента задержки 25 будет сигнал, который с пятого выхода 53 устройства направляется на источник напряжения, обеспечивающий вращение по часовой стрелке груза относительно объекта (Uдв.3=U).
В случае, когда ϕ<0, на выходе второго элемента И 32 благодаря наличию третьего элемента НЕ 30 и сигналу с выхода второго элемента задержки 25 появится сигнал, который с третьего выхода 51 устройства будет подаваться на источник напряжения, обеспечивающий вращение против часовой стрелки груза относительно объекта (Uдв.3=-U). Если ϕ=0, то на второй вход четвертого элемента И 34 и на первый вход шестого элемента И 36 с выхода четвертого порогового элемента 40 направляется сигнал для осуществления перехода к горизонтальному перемещению.
По управляющему сигналу с шестого выхода распределителя 23 импульсов на вход считывания четвертого входного регистра 7 с его выхода величина Взад подается на второй вход второго блока 15 вычитания. С выхода этого блока значение Δ, определяемое по формуле (6), засылается на входы первого 37 и второго 38 пороговых элементов, в которых постоянно «зашит» уровень сравнения. Эти элементы настроены в соответствии с соотношениями (8) следующим образом: если Δ>0, то на выходе элемента 38 будет 1, если Δ<0, то на выходе этого элемента - 0. В случае, когда Δ=0, на выходе элемента 37 будет 1, в других случаях на выходе этого элемента - 0. Следовательно, если Δ>0, то на выходе четвертого элемента И 34 благодаря наличию сигналов с выхода четвертого порогового элемента 40 и с выхода третьего элемента задержки 26 будет сигнал, который с четвертого выхода 52 устройства направляется на источник напряжения, обеспечивающий горизонтальное перемещение груза относительно объекта вправо (Uдв.2=U).
В случае, когда Δ<0, на выходе шестого элемента И 36 благодаря наличию второго элемента НЕ 29 и сигналу с выхода четвертого порогового элемента 40 появится сигнал, который с шестого выхода 54 устройства будет подаваться на источник напряжения, обеспечивающий горизонтальное перемещение груза относительно объекта влево (Uдв.2=-U). Если Δ=0, то с выхода первого порогового элемента 37 направляется сигнал через четвертый элемент задержки 27 на вход блока 41 индикации, на котором высвечивается надпись «конец работы».
Для повышения надежности и достоверности результатов работы устройства обновленные величины bij можно заслать в него повторно и повторить работу устройства по уже описанной схеме. Порядок работы представлен на циклограмме (фиг.3).
Таким образом, описанное устройство повышает быстродействие и удобство эксплуатации, что проявляется в следующем:
- автоматическое закрепление груза на объект без участия обслуживающего персонала;
- снижение трудозатрат обслуживающего персонала;
- ускорение процесса закрепления груза на объект;
- закрепление груза на труднодоступные, расположенные вне видимости обслуживающего персонала места объекта.
Промышленная применимость изобретения обосновывается тем, что оно может быть использовано в различных областях (отраслях) при ориентации груза относительно объекта для его последующего закрепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ВРЕМЕННОЙ ДИСКРЕТИЗАТОР | 2015 |
|
RU2583707C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ФУНКЦИИ РАСПРЕДЕЛЕНИЯ СЛУЧАЙНЫХ ВЕЛИЧИН И ЕЕ ТОЛЕРАНТНЫХ ГРАНИЦ ПО МАЛЫМ ВЫБОРКАМ | 2014 |
|
RU2553120C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИЙ ЦЕННОСТИ ЕДИНИЧНЫХ ОЦЕНОЧНЫХ ПОКАЗАТЕЛЕЙ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2445687C1 |
| УСТРОЙСТВО ДЛЯ ТЕХНИКО-ЭКОНОМИЧЕСКОЙ ОЦЕНКИ ВЫПОЛНЕНИЯ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИХ И ОПЫТНО-КОНСТРУКТОРСКИХ РАБОТ | 2011 |
|
RU2470365C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПРЕДПОЧТИТЕЛЬНОГО УРОВНЯ УНИФИКАЦИИ ТЕХНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2427900C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ОЦЕНКИ ФАЗОВОЙ НАПРЯЖЕННОСТИ РЕСПОНДЕНТА | 2012 |
|
RU2492520C1 |
| УСТРОЙСТВО ДЛЯ СОДЕРЖАТЕЛЬНОГО АНАЛИЗА ТЕКСТОВОЙ ИНФОРМАЦИИ | 2014 |
|
RU2568272C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ | 2000 |
|
RU2160919C1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧ НЕЛИНЕЙНОГО СТОХАСТИЧЕСКОГО ПРОГРАММИРОВАНИЯ | 1991 |
|
RU2006933C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЭФФЕКТИВНОСТИ | 2006 |
|
RU2306598C1 |
Изобретение относится к робототехнике с системами автоматического управления и может быть использовано при ориентации груза относительно объекта для его последующего закрепления. Технический результат - повышение быстродействия и удобства эксплуатации. Согласно изобретению техническими средствами отрабатываются два алгоритма: алгоритм подъема (опускания) и алгоритм ориентации (вращения и горизонтального перемещения) закрепляемого груза относительно объекта. Эти алгоритмы реализуются при помощи дополнительно введенных блоков и элементов. 3 ил.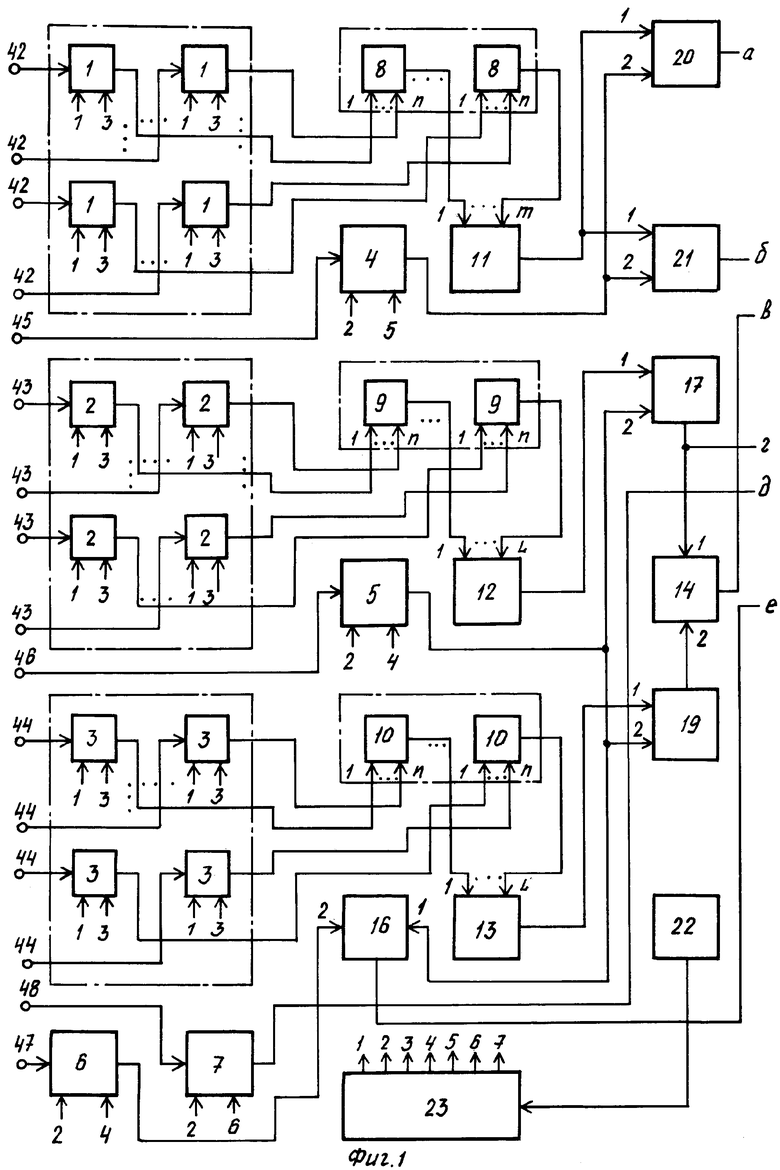
Устройство для выбора управляющих воздействий, содержащее с первого по четвертый элементы И, с первого по третий элементы НЕ, с первого по четвертый пороговые элементы, причем выход первого элемента НЕ соединен с первым входом первого элемента И, а выход второго элемента НЕ подключен к первому входу второго элемента И, отличающееся тем, что оно дополнительно содержит с первого по третий блоки входных регистров, выполненные в виде матриц, с первого по четвертый входные регистры, с первого по третий блоки сумматоров с накоплением, с первого по третий сумматоры с накоплением, с первого по третий блоки вычитания, с первого по третий блоки деления, первый и второй блоки сравнения, с первого по четвертый элементы задержки, пятый и шестой элементы И, блок индикации, генератор тактовых импульсов и распределитель импульсов, вход которого соединен с выходом генератора тактовых импульсов, первый выход распределителя импульсов - с входами записи каждого регистра первого, второго и третьего блоков входных регистров, второй выход - с входами записи первого, второго, третьего и четвертого входных регистров, третий выход - с входами считывания каждого регистра первого, второго и третьего блоков входных регистров, четвертый выход - с входами считывания второго и третьего входных регистров, пятый выход - с входом считывания первого входного регистра, шестой выход - с входом считывания четвертого входного регистра, седьмой выход - со вторыми входами первого и третьего элементов И, выходы которых являются соответственно первым и вторым выходами устройства, информационные входы каждого регистра первого блока входных регистров являются входами первой группы входов устройства, а выходы каждой строки матрицы этих регистров соединены с первого по n-ый входами соответствующего сумматора с накоплением первого блока сумматоров с накоплением, выход каждого из которых соединен соответственно с первого по m-ый входами первого сумматора с накоплением, выход которого подключен к первым входам первого и второго блоков сравнения, выход первого из которых соединен с первым входом третьего элемента И и входом первого элемента НЕ, а выход второго блока сравнения - с входом второго элемента задержки, выход которого подключен ко второму входу второго элемента И, выход которого является третьим выходом устройства, информационные входы каждого регистра второго блока входных регистров являются входами второй группы входов устройства, а выходы каждой строки матрицы этих регистров соединены с первого по n-ый входами соответствующего сумматора с накоплением второго блока сумматоров с накоплением, выход каждого из которых соединен соответственно с первого по L-ый входами второго сумматора с накоплением, выход которого подключен к первому входу первого блока деления, выход которого соединен с первыми входами первого и второго блоков вычитания, выходы которых подключены соответственно к первому входу второго блока деления и к входу второго порогового элемента, выход которого соединен с входом третьего элемента задержки, выход которого подключен к входу второго элемента НЕ и к первому входу четвертого элемента И, выход которого является четвертым выходом устройства, информационные входы каждого регистра третьего блока входных регистров являются входами третьей группы входов устройства, а выходы каждой строки матрицы этих регистров соединены с первого по n-ый входами соответствующего сумматора с накоплением третьего блока сумматоров с накоплением, выход каждого из которых соединен соответственно с первого по L-ый входами третьего сумматора с накоплением, выход которого подключен к первому входу третьего блока деления, выход которого соединен со вторым входом первого блока вычитания, информационный вход первого входного регистра является первым входом устройства, а выход подключен ко вторым входам первого и второго блоков сравнения, информационный вход второго входного регистра является вторым входом устройства, а выход соединен со вторыми входами первого и третьего блоков деления, а также с первым входом третьего блока вычитания, выход которого подключен к входу первого элемента задержки, выход которого соединен со вторым входом второго блока деления, выход которого подключен к входам третьего и четвертого пороговых элементов, информационные входы третьего и четвертого входных регистров являются соответственно третьим и четвертым входами устройства, а выходы соединены со вторыми входами соответственно третьего и второго блоков вычитания, выход третьего порогового элемента подключен к входу третьего элемента НЕ и к первому входу пятого элемента И, второй вход которого соединен с выходом второго элемента задержки, а выход является пятым выходом устройства, выход четвертого порогового элемента подключен ко второму входу четвертого элемента И и к первому входу шестого элемента И, второй вход которого соединен с выходом второго элемента НЕ, а выход является шестым выходом устройства, выход второго блока вычитания подключен также к входу второго порогового элемента, выход которого через четвертый элемент задержки соединен с входом блока индикации.
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Устройство для автоматического вождения хлопкоуборочной машины | 1989 |
|
SU1658851A2 |
| DE 3925275 A1, 07.02.1991 | |||
| СПОСОБ ПОЛУЧЕНИЯ МОНОАРЙЛМОЧЕВЙНiiw | 0 |
|
SU173747A1 |
| US 5219258 A, 05.06.1993 | |||
| US 4766322 А, 23.08.1988. | |||

