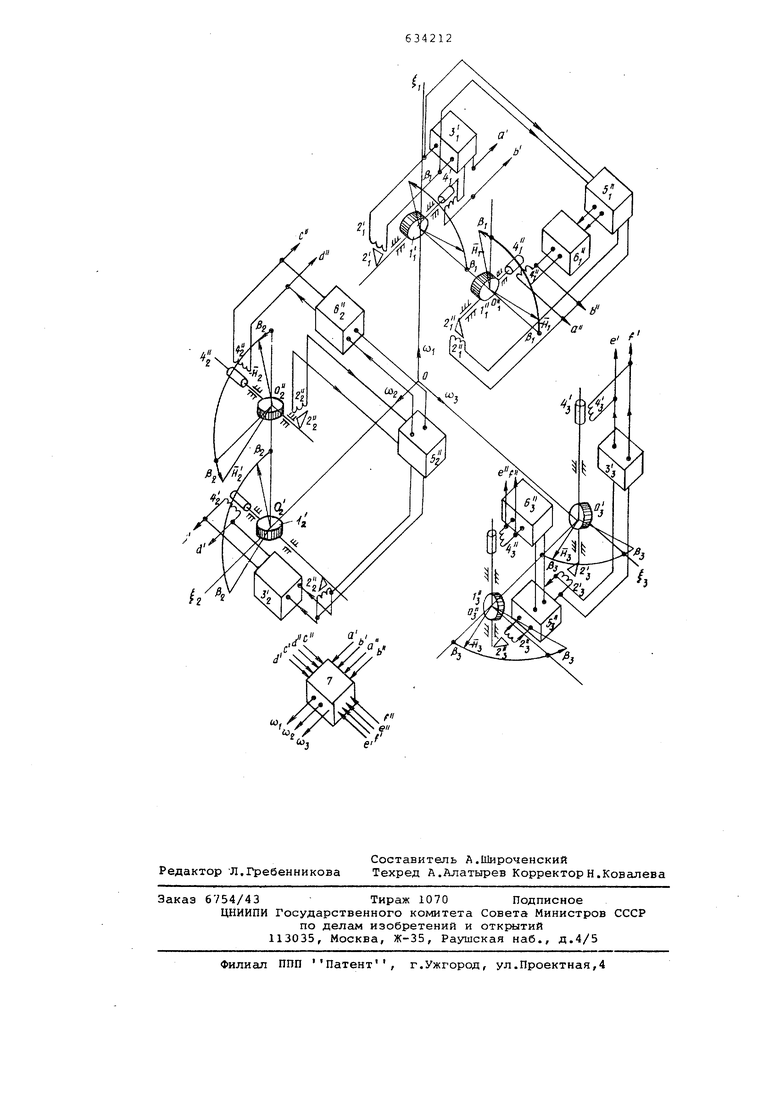
(54) ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ усилитель мощности 6у к датчикам моментов 4 следящего гироскопа Г , Измерительный гироскоп ll (l , Ij ) работает обычным образом. Полу ченные рассогласования по углу между ч /t-i измерительным 1 ) .гироскопами следящим 1. сравниваются в усилителе 5;; (Sj 5/ ) , усиливаются у силитё77ём {б / 6j ) и отрабатываются датчиком моментов 4 42 f 4 5 J елеСледящий гироскоп дящего гироскопа. н,се.
H uj2Cosf32-H jCiD,|Sinp - {i2-ip
НзШ со5 ъ -Н Ш251П|г -| С1;-1р pt Н Н,,-Нз Н ии з Pгcosfi - 2sinp sшf э /J 1npг5m).osft
H(sfnp 5infijcosp,,-vco&p cosp.cosp3)
-iii3bin -lCO f2 i - COe,ft2COS:p 3
H(6inp 5inpjCosp2- -cospi cosp,coep3)
Ш - - - C05/5 Stnfb3-XJ3 ObP-fC.05p д
5 H(sinfb STnp cosp2- cosp.co5p2Cosp,j)
Kj /. .« где rzV r j i- - Здесь каждое уравнение, определяю- 30 щее одну компоненту угловой скорости, содержит токи,протекающие в обмотках датчиков моментов трех гироскопов, и показания трех датчиков углов.
Формула изобретения
Трехкомпонентный измеритель угловой скорости, содержащий вычислитель и три однокомпонентных гироскопических измерителя, каждый из которых включает в себя два гироузла с датчиками углов и моментов и противоположным вращением роторов гиромоторов, суммирующий усилитель, входы которого саязаны с датчиками углов, и два
усилителя мощности, выходы каждого из которых подключены к датчику момента гироузла и вычислителю, отличающийся тем, что, с целью повышения точности, вход одного усилителя мощности соединен с выходом суммирующего усилителя, а вход другого усилителя мощности - с датчиком угла того гироузла, к датчику момента которого подсоединен его выход.
Источники информации, принятые во внимание при экспертизе;
1.Горенштейн И.А. и Шульман И.А. Инерциальные навигационные системы, 1970, с.72-81.
2. Авторское свидетельство СССР f 256405, кле Q01 Р 9/02, 1968. будет в точности повторять движение измерительного ироскопа. Токи датчиков моментов 4,4, 4, г g , 4j каждый из пары гироскопов подаются в вычислитель 7, работающий по определенному алгоритму. На выходе его получим три сигнала, в некотором масштабе изображающих три компоненты вектора абсолютной угловой скорости объекта. Из уравнений движения главных осей гироскопов можно получить (1-;м;)
ш
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |