1
Изобретение относится к тормозным системам транспортных средств, в частности к способам и устройствам регулирования процесса торможения и может быть использовано в автоматических противоблокировочных устройствах.
Наиболее близкий из известных способов регулирования качения колеса в тормозном режиме, заключающийся в периодическом затормаживании, растормаживании колеса и выдержке между растормаживанием и затормаживанием, причем командный сигнал на растормаживание подают при достижении угловым замедлением порогового значения, на выдержку - при достижении угловым замедлением нулевого значения, а на повторное затормаживание - при снижении углового ускорения за точкой максимума на заранее заданную величину 1.
Однако известный способ регулирования качения колеса в тормозном режиме при требовании помехоустойчивости вынуждает подавать командный сигнал на повторное затормаживание не в точке максимума, а после снижения углового ускорения за точкой максимума на определенную величину, которая заведомо больше величины пульсации сигнала углового услорения. Это приводит на некоторых дорожных покрытиях к снижению эффективности торможения из-за поздней подачи командного сигнала на повторное затормаживание. Цель изобретения - повышение эффек5 тивности торможения.
Эта цель достигается тем, что подают дублирующий командный сигнал на повторное затормаживание при достижении угловым ускорением нулевого значения, а
10 затормаживание выполняют при поступлении любого из двух командных сигналов на затормаживание.
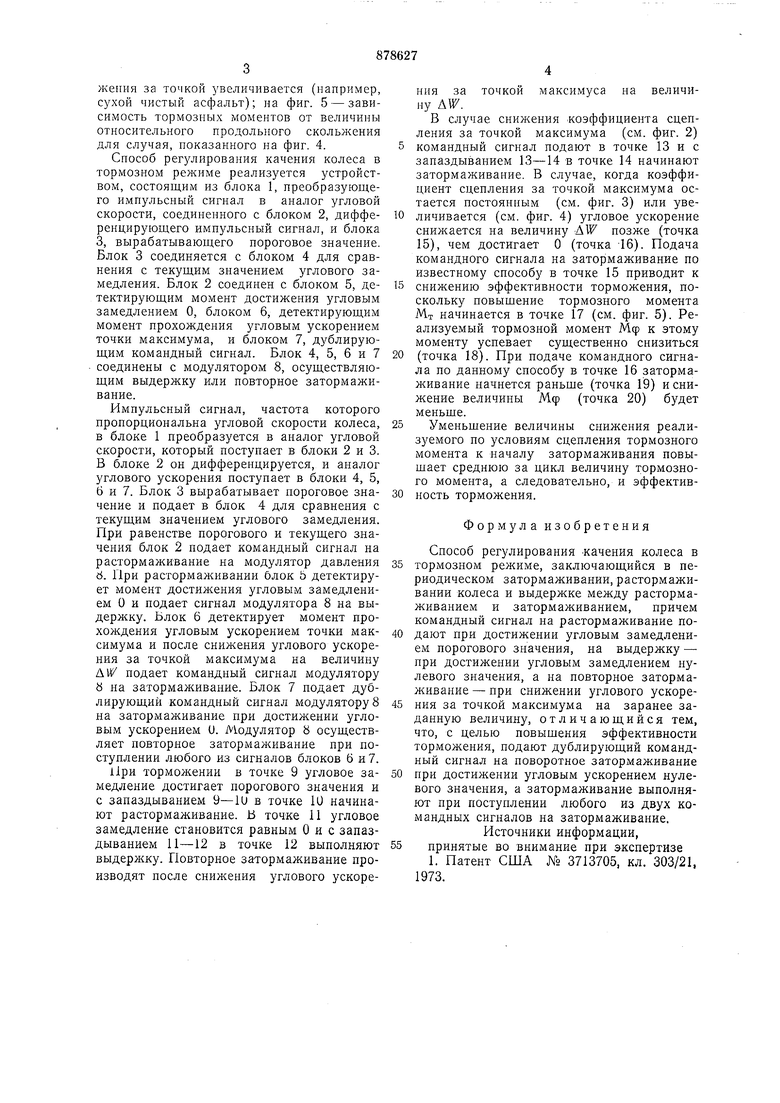
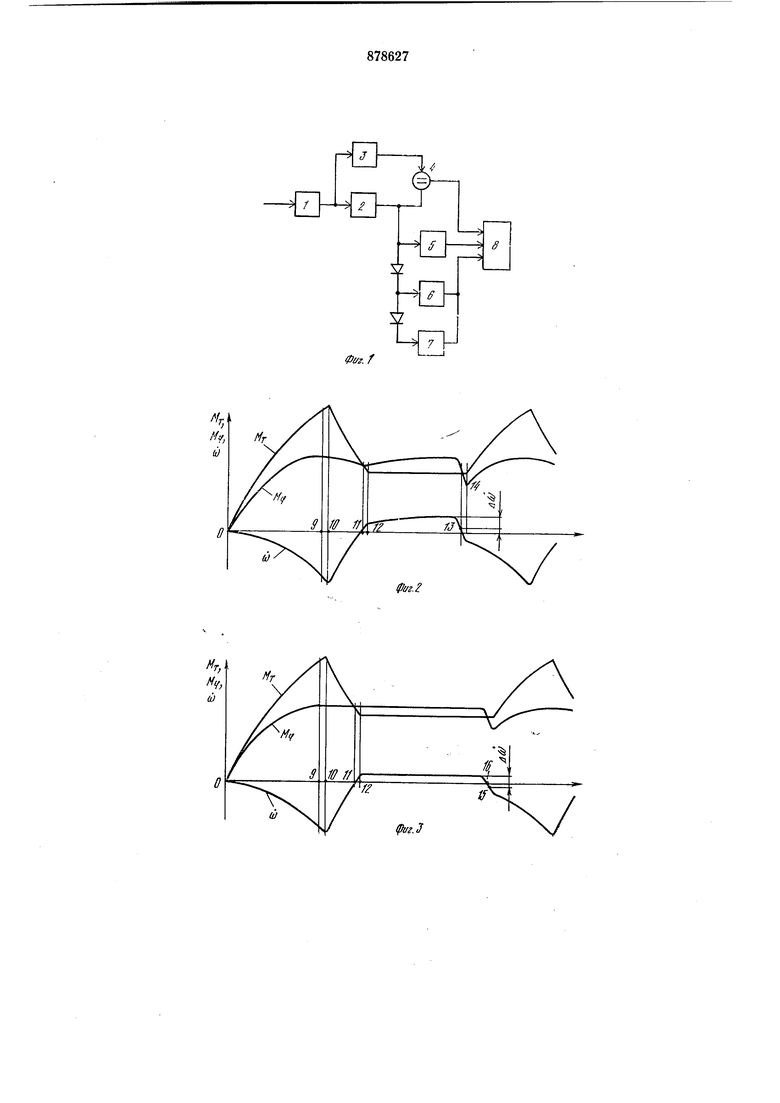
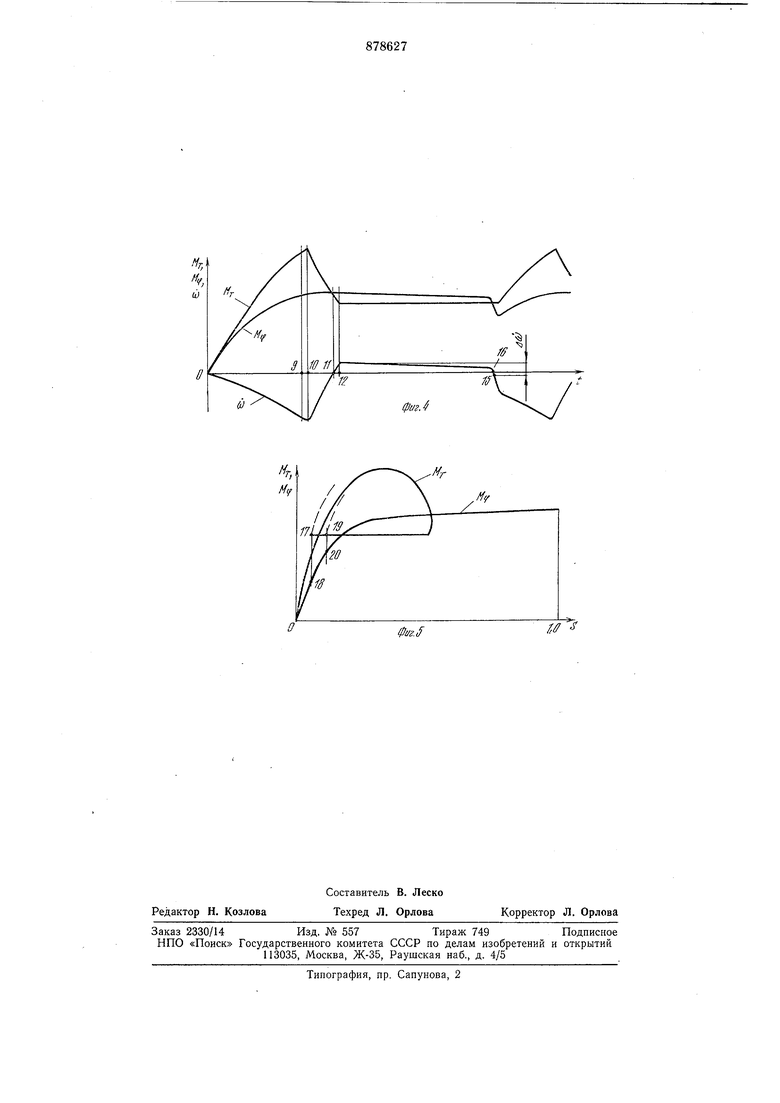
На фиг. 1 представлена блок-схема, иллюстрирующая способ регулирования качения колеса в тормозном режиме; на фиг. 2 - графики изменения подведенных к колесу и реализуемых по условиям сцепления с дорогой тормозных моментов и углового ускорения (замедления) в случае снижения коэффициента сцепления за точкой максимума (точкой критического относительного продольного скольжения, например, мокрый асфальт); на фиг. 3-графики тех же параметров для случая, когда коэффициент сцепления при увеличении относительного продольного скольжения за точкой остается постоянным (например, лед); на фиг. 4 - графики тех же параметров, когда коэффициент сцепления при уве30 личении относительного продольного скольжепия за точкой увеличивается (например, сухой чистый асфальт); иа фиг. 5 - зависимость тормозных моментов от величины относительного продольного скольжения для случая, показанного на фиг. 4.
Способ регулирования качения колеса в тормозном режиме реализуется устройством, состоящим из блока 1, преобразующего импульсный сигнал в аналог угловой скорости, соединенного с блоком 2, дифференцирующего импульсный сигнал, и блока 3, вырабатывающего пороговое значение. Блок 3 соединяется с блоком 4 для сравнения с текущим значением углового замедления. Блок 2 соединен с блоком 5, детектирующим момент достижения угловым замедлением О, блоком 6, детектирующим момент прохождения угловым ускорением точки максимума, и блоком 7, дублирующим командный сигнал. Блок 4, 5, 6 и 7 соединены с модулятором 8, осуществляющим выдержку или повторное затормаживание.
Импульсный сигнал, частота которого пропорциональна угловой скорости колеса, в блоке 1 преобразуется в аналог угловой скорости, который поступает в блоки 2 и 3. В блоке 2 он дифференцируется, и аналог углового ускорения поступает в блоки 4, 5, 6 и 7. Блок 3 вырабатывает цороговое значение и подает в блок 4 для сравнения с текущим значением углового замедления. При равенстве порогового и текущего значения блок 2 подает командный сигнал на растормаживание на модулятор давления d. При растормаживании блок b детектирует момент достижения угловым замедлением О и подает сигнал модулятора 8 на выдержку. Блок 6 детектирует момент прохождения угловым ускорением точки максимума и после снижения углового ускорения за точкой максимума на величину ди/ подает командный сигнал модулятору 8 на затормаживание. Блок 7 подает дублирующий командный сигнал модулятору 8 на затормаживание нри достижении угловым ускорением U. М.одулятор 8 осуществляет повторное затормаживание при поступлении любого из сигналов блоков 6 и 7.
11ри торможении в точке 9 угловое замедление достигает порогового значения и с запаздыванием 9-1 и в точке 10 начинают растормаживание. Б точке 11 угловое замедление становится равным О и с запаздыванием 11-12 в точке 12 выполняют выдерл ку. Повторное затормаживание производят после снижения углового ускорения за точкой максимуса на величину AW.
В случае снижения .коэффициента сцепления за точкой максимума (см. фиг. 2) командный сигнал подают в точке 13 и с запаздыванием 13-14 в точке 14 начинают затор.маживание. В случае, когда коэффициент сцепления за точкой максимума остается постоянным (см. фиг. 3) или увеличивается (см. фиг. 4) угловое ускорение снижается на величину AW позже (точка 15), чем достигает О (точка -16). Подача командного сигнала на затормаживание по известному способу в точке 15 приводит к
снижению эффективности торможения, поскольку повышение тормозного момента Мт начинается в точке 17 (см. фиг. 5). Реализуемый тормозной момент Мф к этому моменту успевает существенно снизиться
(точка 18). При подаче командного сигнала по данному способу в точке 16 затормаживание начнется раньше (точка 19) и снижение величины Мф (точка 20) будет меньше.
Уменьшение величины снижения реализуемого по условиям сцепления тормозного момента к началу затормаживания повышает среднюю за цикл величину тормозного момента, а следовательно, и эффективность торможения.
Формула изобретения
Способ регулирования .качения колеса в
тормозном режиме, заключающийся в периодическом затормаживании, растормаживании колеса и выдержке между растормаживанием и затормаживанием, причем командный сигнал на растормаживание подают при достижении угловым замедлением порогового значения, на выдержку - при достижении угловым замедлением нулевого значения, а на повторное затормаживание - при снижении углового ускорения за точкой максимума на заранее заданную величину, отличающийся тем, что, с целью повышения эффективности торможения, подают дублирующий командный сигнал на поворотное затормаживание
при достижении угловым ускорением нулевого значения, а затормаживание выполняют при поступлении любого из двух командных сигналов на затормаживание, Источники информации,
принятые во внимание при экспертизе
1. Патент США № 3713705, кл. 303/21, 1973.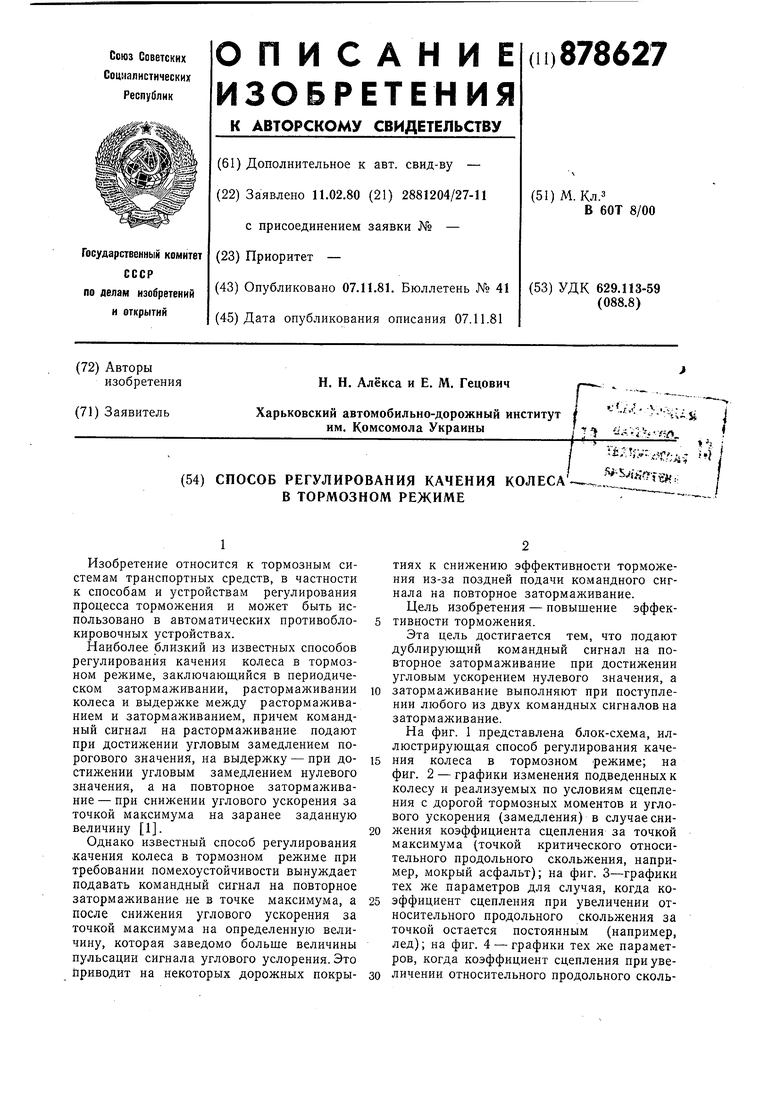
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
| Способ предотвращения блокированияКОлЕСА АВТОМОбиля | 1979 |
|
SU839789A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Способ управления процессом торможения автомобиля | 1980 |
|
SU912570A1 |
| Устройство ограничения тормозного давления противоблокировочной тормозной системы транспортного средства | 1982 |
|
SU1523434A2 |
| Противоблокировочная тормозная сис-TEMA | 1977 |
|
SU844421A1 |
| Способ регулирования тормозного момента на колесе транспортного средства | 1980 |
|
SU933507A1 |
м,
Ь)
Фаг. г
Mif,
м,
ш
м
10 f/
г
If
фиг.З
