Изобретение относится к неразрушающему контролю конструкций ультразвуковыми методами и может быть использовано для повышения производительности обнаружения трещин, например, в листах, емкостях и трубопроводах не только при их выпускном контроле в процессе производства, но и при плановом испытании и контроле в процессе эксплуатации, например при эксплуатации нефте- и газопроводов. Способ направлен на решение актуальной задачи обнаружения трещин на ранней стадии их развития, прогнозирования поведения и роста трещин, оперативного решения о возможности дальнейшей эксплуатации дорогостоящих и опасных объектов, имеющих трещины.
Актуальность проблемы раннего обнаружения трещин общепризнана. Именно поэтому сотни компаний, например, Panametric, Krautkramer, Нординкрафт, РДМ, Радиоавионика и др. (журнал «В мире неразрушающего контроля», ссылки на сайте http://www.acsys.ru/links.htm) во всем мире разрабатывают ультразвуковые дефектоскопы для обнаружения дефектов в трубопроводах, баллонах и емкостях, содержащих газы и жидкости, котлах отопления, деталях машин и механизмов, рельсах и колесных парах поездов, в сварных соединениях конструкций и в других объектах. Большинство известных ультразвуковых дефектоскопов используют ультразвуковую локацию на основе принципов линейной акустики, при которой дефект обнаруживается по изменению амплитуды принятой ультразвуковой волны и имеют существенный недостаток - они не позволяют определить тип дефекта (трещина или полость) и не обнаруживают закрытые (статически поджатые) трещины, не дающие отражения ультразвуковой волны при ее естественном состоянии. Для того чтобы осуществить дефектоскопию всей конструкции, используют сканирование, которое можно осуществить различным образом, например путем перемещения одного ультразвукового датчика по поверхности конструкции с определенным шагом. Синхронно с перемещением ультразвукового датчика измеряют его координаты, а по амплитуде и времени прихода ультразвуковой волны, отраженной от дефектов, определяют их местоположение и размеры. Такая процедура требует значительного времени на проведение исследований значительных участков конструкции и обладает низкой производительностью измерений. Кроме того, такой способ применим в основном при выпускном контроле изделий в процессе производства, когда легко обеспечить свободный доступ к любому участку конструкции.
Так, известен способ ультразвукового контроля изделий цилиндрической формы (пат. RU 2180111, опубл. 27.02.2002 г., МПК7 G 01 N 29/04, G 01 N 29/06) частично решающий проблему обнаружения дефектов в процессе выходного контроля конструкций на производстве и позволяющий обнаруживать дефекты во всем объеме цилиндрического объекта. Способ заключается в том, что ультразвуковым датчиком дефектоскопа, перемещаемым по поверхности изделия, равномерно сканируют изделие по спирали с определенным шагом спирали и шагом сканирования, величины которых не превышают значения ширины ультразвукового луча, и формируют в памяти блока обработки информации и управления массив данных распределения эхосигналов с привязкой каждого измерения к соответствующей ему координате, фиксируют количество точек контроля, в которых обнаружен дефект, по совокупности координат этих точек определяют конфигурацию и местоположение дефекта и по определенной формуле рассчитывают площадь дефекта. Недостатком данного линейного способа ультразвукового контроля является низкая производительность измерений, поскольку преобразователь дефектоскопа сканирует по поверхности с небольшим шагом, определяемым его конструкцией и для сканирования всей поверхности требуется значительное время. Недостатком способа является также то, что он не позволяет различить тип дефекта: трещину или полость, поскольку использует линейный акустический принцип локации.
В настоящее время известен целый ряд способов (см. напр., пат. RU 2205397, опубл. 27.05.2003 г., МПК7 G 01 N 29/04, G 01 N 29/10; RU 2205396, опубл. 27.05.2003 г., МПК7 G 01 N 29/04, G 01 N 29/10; RU 2212660, опубл. 20.09.2003 г. МПК7 G 01 N 29/04, G 01 N 29/10; RU 2201590, опубл. 27.03.2003 г., МПК7 G 01 N 29/04, G 01 N 29/10 и др.) внут-ритрубного контроля, которые частично решают проблему обнаружения дефектов в конструкциях, находящихся в процессе эксплуатации, и позволяют обнаруживать дефекты в протяженных конструкциях с высокой производительностью за счет использования большого числа ультразвуковых датчиков, перемещаемых одновременно. Указанные способы внутритрубного ультразвукового контроля трубопроводов заключаются в пропуске внутри трубопровода сложного и дорогостоящего инспекционного снаряда с установленными на нем по его наружному периметру ультразвуковыми датчиками, а также расположенными в нем средствами измерений, обработки и хранения данных измерений, испускании в процессе пропуска инспекционного снаряда зондирующих ультразвуковых импульсов и приеме отраженных ультразвуковых импульсов, преобразовании и хранении данных измерений, по которым затем судят о наличии участков контролируемого трубопровода с отклонениями толщины его стенки от номинального значения и/или наличии дефектов в стенках контролируемого трубопровода. Недостатком этих способов является низкая надежность измерений за счет того, что не удается одновременно обеспечить постоянный и нормированный акустический контакт для всей решетки ультразвуковых датчиков с помощью жидкости, особенно при исследовании газопроводов. Это приводит к модуляции чувствительности преобразователей, изменению амплитуды отражений и, следовательно, к снижению достоверности измерений и возможному пропуску дефектов. Расстояние между каждым ультразвуковым датчиком и поверхностью трубопровода постоянно изменяется, что затрудняет определение микродефектов и позволяет обнаруживать главным образом только макродефекты. Кроме этого, данный линейный акустический способ не позволяет отличить трещину от полости, что существенно снижает его информативность. Сложности, связанные с обеспечением равномерного движения снаряда и определением его текущих координат по отношению к исследуемому участку трубопровода, приводят к значительным погрешностям (метры) в определении положения обнаруженного дефектного участка. Это приводит к необходимости дополнительных исследований обнаруженных дефектных участков конструкции обычными дефектоскопами, имеющими меньшую ошибку в определении местоположения дефектов, что увеличивает общее время, необходимое для обнаружения дефектов, снижает производительность измерений и удорожает стоимость работ. К недостаткам указанных способов можно также отнести их ограниченные возможности применения, связанные с возможностью использования инспекционных снарядов только для трубопроводов большого диаметра, а также высокая стоимость производства и обслуживания таких измерений.
Обычно объект исследования содержит множество дефектов: трещины, полости, свищи, вкрапления и др.. Наиболее опасными из них являются трещины, так как они имеют тенденцию роста с течением времени и приводят к непредсказуемому по времени разрушению объекта (конструкции). Появившаяся трещина развивается с течением времени тем быстрее, чем она больше. На последней, самой короткой по времени стадии она приводит к необратимым последствиям: расслоению поверхностей, обрушению конструкций, разрыву трубопровода, и т.п.. В отличие от трещин, полости (каверны, отверстия, свищи и т.п. дефекты) являются типом дефекта, который хотя и может увеличивать свои размеры, но эти изменения происходят медленно, не приводя к быстрым катастрофическим изменениям свойств объекта. Именно поэтому возникает необходимость в разработке новых способов раннего обнаружения трещин (микротрещин, колоний трещин) и периодического контроля за их наличием как при выходном контроле объекта, так и за их возникновением в процессе эксплуатации объекта (конструкции). Эта информация о наличии и размере трещин позволяет определять и оценивать ресурс объекта, при котором он не изменит своих физико-механических свойств, снизить риск разрушений и увеличить безопасность его обслуживания и эксплуатации. Кроме того, это еще и экономическая проблема - замена участков, имеющих зарождающиеся или развитые трещины, должна производиться обязательно, что достаточно дорого, а дефекты в виде полостей хотя и фиксируются, но обычно не являются обязательньми для замены. Эта проблема особенно актуальна для трубопроводов. Проблема обнаружения трещин может быть решена на основе использования нелинейных акустических способов (см., например, Казаков В.В., Сутин A.M. Использование эффекта модуляции ультразвука вибрациями для импульсной локации трещин //Акустический журнал., Т.47, N.3, 2001, С.364-369; D. Donskoy, A. Sutin, A. Ekimov Nonlinear acoustic interaction on contact interfaces and its use for nondestructive testing // NDT&E International Vol.34, 2001, P.231-238), поскольку трещины (колонии трещин) приводят к резкому возрастанию нелинейных акустических эффектов. Для реализации одного из возможных способов используется когерентная импульсная ультразвуковая локация при одновременном внешнем механическом воздействии (ударом, вибрацией) на исследуемый объект. При этом благодаря импульсному режиму локации удается надежно определить местоположение дефекта, а по наличию или отсутствию модуляции принимаемых ультразвуковых импульсов возможно надежно отличить друг от друга дефекты разного типа: полости (модуляции нет) или открытые и закрытые трещины (модуляция есть).
Так известен способ обнаружения трещин в конструкциях, использующий нелинейные акустические эффекты (пат. RU 2219538, опубл. 20.12.2003, МПК7 G 01 N 29/04). Данный способ позволяет обнаруживать наличие трещин в конструкциях. Способ заключается в том, что в конструкции возбуждают первичные акустические волны различных частот, которые, взаимодействуя на трещине, генерируют вторичные акустические волны на комбинационных частотах, измеряют амплитуды первичных и вторичных волн, на основании которых определяют коэффициент наличия трещины, по превышению которым порогового значения, определяемого на основе измерений бездефектной конструкции, судят о наличии трещин. Первичные акустические волны производят путем последовательного возбуждения ультразвуковых волн на ряде частот с одновременным с каждой из частот ультразвуковых волн возбуждением упругих колебаний на собственных частотах посредством ударного воздействия по конструкции. При этом измеряют собственные частоты, а комбинационные частоты определяют как сумму и разность каждой частоты ультразвуковых волн с каждой из собственных частот упругих колебаний, причем коэффициент наличия трещины рассчитывают по определенной формуле. Основным недостатком данного нелинейного акустического способа является то, что он не позволяет обнаруживать местоположение трещин и, следовательно, определять их распределение по изделию и количество, а определяет только их наличие. Это связано с тем, что для реализации способа используется непрерывный режим излучения ультразвуковой волны, который не позволяет обнаруживать положение трещин и их количество. Способ может использоваться только для разбраковки изделий по принципу: есть трещина или нет трещины. К недостаткам способа можно также отнести то, что для реализации метода нужно изменять не только частоту возбуждения изделия, но и частоту ультразвуковой волны, чтобы избежать влияния на результат измерения интерференционных искажений, поскольку трещина может оказаться в узле интерференции и не провзаимодействовать с ультразвуковой волной. Для устранения этого эффекта необходимо проводить измерения при различных частотах излучения ультразвуковой волны, что увеличивает общее время проведения измерений. Кроме того, для излучения ультразвуковой волны на нескольких частотах необходимо использовать специальные широкополосные ультразвуковые датчики, что усложняет реализацию способа.
Известен способ нелинейного ультразвукового сканирования для обнаружения трещин в конструкциях (патент USA 5736642, опубл. 07.04.1998 г., МПК7 G 01 N 29/06), который позволяет локально обнаруживать трещины и определять их местоположение путем перемещения датчика по поверхности конструкции. Способ заключается в том, что в конструкции возбуждают первичные акустические волны различных частот, которые взаимодействуя на трещине, генерируют вторичные акустические волны на комбинационных частотах, измеряют амплитуды первичных и вторичных волн, на основании которых определяют коэффициент наличия трещины, по превышению которым порогового значения, определяемого на основе измерений бездефектного твердого тела, судят о наличии трещин. Способ использует нелинейные акустические эффекты для локального обнаружения трещин. Его основным недостатком является низкая производительность обнаружения трещин, связанная с тем, что трещины определяются только на ограниченном участке конструкции и для обнаружения трещин по всей конструкции датчик необходимо перемещать по ее поверхности, обнаруживая трещины на отдельных участках. Недостатком способа является также низкая чувствительность, поскольку для взаимодействия используются две высокочастотные ультразвуковые волны. Высокочастотные волны создают ничтожные смещения среды и, следовательно, ничтожные изменения акустических характеристик трещины, что снижает эффект нелинейного взаимодействия волн. Возникающие амплитуды модуляции акустических характеристик трещины, вызванные распространением высокочастотной ультразвуковой волны, будут существенно меньше по сравнению с амплитудами модуляции, создаваемыми одной низкочастотной волной, имеющей частоту в диапазоне от единиц герц до десятков килогерц, возбуждаемой с помощью вибратора или удара. Кроме того, низкочастотное возбуждение обычно производится на резонансной частоте конструкции. В этом случае нелинейные эффекты и, следовательно, амплитуда модуляции дополнительно возрастет за счет увеличения амплитуды колебаний конструкции, обусловленные ее добротностью.
Известен нелинейный акустический способ обнаружения трещин, позволяющий одновременно обнаруживать местоположение и наличие трещин по трассе локации (пат. USA 3867836, опубл. 25.02.1975 г., МПК G 01 N 29/04). Способ заключается в обнаружении трещин консольно закрепленного протяженного образца, свободный конец которого возбуждается акустической волной на первой частоте от первого источника колебаний. В торец закрепленного конца образца излучают акустическую волну от импульсного источника колебаний второй частоты, причем вторая частота существенно выше первой. Волна второй частоты распространяется в образце, отражается от трещины, формирует от нее эхо, которое показывается на осциллографе и по модуляции которого определяют местоположение трещины и оценивают ее размер. Недостатком способа является то, что он имеет ограниченные возможности применения и может использоваться только для таких объектов, в торец которых можно ввести ультразвуковую волну и которые можно закрепить консольно, что неприемлемо для обнаружения трещин в эксплуатируемых конструкциях, например, трубопроводах, крыльях самолетов и т.п.. Консольное закрепление объекта может повредить образец в месте его закрепления и привести к его деформации, что недопустимо. Кроме этого, способ имеет низкую производительность измерений, обусловленную способом регистрации. С помощью осциллографа в основном определяется местоположение дефекта, а с помощью вольтметра определяется амплитуда модуляции. Использование для регистрации одновременно и вольтметра и осциллографа увеличивает время на проведение измерений и снижает их производительность. К недостаткам способа можно также отнести тот факт, что модуляция производится на одной, достаточно высокой (10-20 кГц) частоте с помощью ультразвукового вибратора. С увеличением частоты увеличивается номер возбуждаемой моды колебаний и, следовательно, количество узловых линий. Если трещина попадает в узел колебаний, она не приводит к модуляции ультразвуковой волны и ее обнаружение не состоится, что снижает достоверность измерений.
Наиболее близким по технической сущности и достигаемому эффекту является нелинейный акустический способ обнаружения дефектов и их положения в конструкциях (пат. USA 6301967, опубл. 16.10.2001 г., МПК7 G 01 N 29/00, G 01 H 13/00), основанный на модуляции трещин, который выбран в качестве ближайшего аналога.
Данный способ обнаружения дефектов и их местоположений в конструкции заключается в том, что в исследуемой конструкции распространяют зондовый сигнал первой частоты с частотой повторения равной второму значению частоты, в конструкции одновременно распространяют низкочастотный вибрационный сигнал, приводящий к модуляции зондового сигнала на дефекте конструкции, и анализируют распространяющуюся между излучателем и приемником последовательность импульсов зондового сигнала. Для определения местоположения трещин выбирают и обрабатывают только те временные последовательности, которые показывают области конструкции, имеющие дефект, причем при обработке в последовательности импульсов зондового сигнала определяют наличие модуляции, соответствующей частотам низкочастотного вибрационного сигнала, по амплитуде которой судят о наличии и величине трещины.
Основным недостатком данного способа является то, что он имеет низкую производительность измерений. Это связано с тем, что способ позволяет обнаруживать дефекты лишь в диапазоне расстояний, определенных установленными излучающим и приемным ультразвуковыми преобразователями. Изменение диапазона, в пределах которого возможно определение трещин, возможно только путем изменения местоположения преобразователей, что требует времени и снижает производительность измерений. Кроме того, расположение и закрепление на поверхности конструкции двух преобразователей требует больше времени, чем одного. Для обнаружения трещин по всей конструкции необходимо последовательно с определенным шагом перемещать оба ультразвуковых преобразователя, что также увеличивает общее время проведения исследований и, следовательно, снижает их производительность. Существенным недостатком способа является также то, что он не точно, а лишь приблизительно позволяет обнаруживать местоположение дефектов. Это связано с тем, что для локации используются два ультразвуковых преобразователя (излучающий и принимающий) расположенные на некотором расстоянии друг от друга. Местоположение дефекта определяется по временной задержке принятой ультразвуковой волны. Наличие базы создает неоднозначность для определения местоположения, поскольку одна и та же временная задержка будет соответствовать одинаковым расстояниям «излучающий преобразователь - дефект - принимающий преобразователь», а расстояния «излучающий преобразователь - дефект» и «дефект - принимающий преобразователь» в общем случае не равны. Они равны только если излучающий и принимающий преобразователи совмещены. Следовательно, данный способ позволяет лишь определить область расстояний, в пределах которых может находиться дефект, а значит, он имеет недостаточно высокую точность определения местоположения дефектов. Уменьшение базы между излучающим и принимающим преобразователями сужает область неоднозначности определения местоположения дефектов и увеличивает этим точность определения их местоположения, но одновременно уменьшает производительность измерений, так как увеличивает время, необходимое на перемещение и закрепление преобразователей для обнаружения дефектов по всей конструкции. К недостаткам способа можно также отнести то, что возбуждение конструкции вибрационной волной одной частоты может привести к возбуждению конструкции на моде колебаний, при которой заранее неизвестное местоположение трещины может оказаться в узле колебаний, что обусловит отсутствие модуляции последовательности ультразвуковых импульсов и, как следствие, приведет к пропуску трещины и снижению достоверности измерений.
Известно устройство для ультразвукового контроля труб, реализующее линейный способ ультразвукового контроля, позволяющее обнаруживать дефекты на локальном участке, расположенном под ультразвуковым преобразователем, при этом ультразвуковой преобразователь выполнен с изменяемым углом ввода ультразвуковой волны (пат. RU 2132054, опубл. 20.06.1999 г., МПК7 G 01 N 29/04). Устройство содержит основание, установленные на основании, по крайней мере, один ультразвуковой преобразователь, соединенный с ультразвуковым дефектоскопом, резервуар для контактной жидкости, сообщающийся гидравлически с зоной контроля под ультразвуковым преобразователем, и узел фиксации основания относительно поверхности трубы. При этом узел фиксации основания относительно поверхности трубы выполнен в виде четырех магнитных колес, установленных на основании на поворотных рычагах с возможностью фиксации их взаимного углового положения при установке основания на поверхность труб определенного диаметра. Ультразвуковой преобразователь подпружинен в радиальном направлении к поверхности трубы и имеет ручной механизм в виде винта для небольшого изменения его углового положения относительно поверхности трубы с целью подстройки угла падения ультразвуковой волны на поверхность трубы в соответствии с ее толщиной. Недостатком устройства является низкая производительность измерений, поскольку оно предназначено для обнаружения дефектов путем перемещения ультразвукового преобразователя по поверхности, а угол ввода ультразвуковой волны фиксирован после подгонки под необходимую толщину трубопровода и в процессе измерений не изменяется. Кроме этого, недостатком устройства является то, что оно не позволяет отличать трещину от полости, поскольку оно работает по методу линейной акустики и в нем отсутствует устройство для модуляции трещин.
Известно устройство для нелинейного акустического обнаружения дефектов и их положения в конструкциях, которое позволяет обнаруживать трещины в конструкциях (пат. USA 6301967 В1, опубл. 16.10.2001 г., МПК7 G 01 N 29/00, G 01 H 13/00, Claim 15). Это устройство содержит блок возбуждения низкочастотной вибрации в конструкции, а также блок возбуждения высокочастотной акустической волны, соединенный с излучателем высокочастотной волны, закрепленным на поверхности конструкции на определенном расстоянии от приемника высокочастотной акустической волны, сигнал с которого подается на блок обработки информации, определяющий положение и наличие трещины.
Основным недостатком устройства является низкая точность определения местоположения трещин, обусловленная тем, что в нем используется два ультразвуковых преобразователя (излучающий ультразвуковую волну и принимающий ультразвуковую волну), расположенных на некоторой базе. Для такого случая расположения преобразователей возможно два режима работы. Первый режим работы - локация на просвет, когда импульс ультразвуковой волны, излученный первым преобразователем, принимается вторым преобразователем по кратчайшей трассе локации. В этом случае все трещины, расположенные по трассе локации, будут поочередно модулировать проходящую через них ультразвуковую волну. Ультразвуковая волна придет от всех дефектов, расположенных по трассе локации, одновременно и по временной задержке ее распространения будет невозможно определить местоположение трещин. Для этого случая возможно определить лишь наличие трещин по трассе локации. Можно лишь указать, что они находятся между ультразвуковыми преобразователями. То есть расстояние между преобразователями определяет точность, с которой определяется местоположение трещин. Второй режим работы - локация на отражение. В этом случае на принимающий преобразователь одновременно могут приходить отражения от различных дефектов, расстояние по трассе локации до которых одинаково. То есть если разность хода ультразвуковых волн для дефектов, расположенных в разных местах одинакова, то и отраженные от них импульсы ультразвуковой волны придут одновременно. Это означает, что по временной задержке невозможно будет определить точное положение дефектов, можно лишь указать область расстояний, в пределах которой они могут находиться. Следовательно, данное устройство имеет недостаточно высокую точность определения местоположения дефектов. Дополнительным недостатком устройства является также низкая производительность измерений, связанная с тем, что трещины обнаруживаются только на фиксированных дальностях, определяемых взаимным расположением излучателя и приемника и направлением их локации, которые в процессе обнаружения трещин не изменяются. Для обнаружения трещин во всей конструкции требуется периодическая переустановка и закрепление излучателя и приемника, что приводит к увеличению общего времени измерений и снижению производительности измерений.
Наиболее близким по технической сущности является устройство для нелинейного акустического обнаружения трещин и их местоположений в протяженном консольно закрепленном образце (пат. USA 3867836, опубл. 25.02.1975 г., МПК G 01 N 29/04), которое позволяет обнаруживать положение и наличие трещин и выбрано в качестве ближайшего аналога. Данное устройство содержит ультразвуковой преобразователь, выполняющий одновременно функции излучателя и приемника ультразвуковой волны, соединенный с ультразвуковым эхолокатором, а также блок возбуждения низкочастотных колебаний, содержащий генератор низкой частоты и вибратор. Выход ультразвукового эхолокатора соединен с блоком обработки информации, а вибратор приведен в контакт с поверхностью свободного конца упомянутого образца посредством сопрягающего элемента.
Недостатком устройства является то, что оно позволяет обнаруживать трещины только по трассе локации, определенной установкой и фиксированным углом ввода ультразвуковой волны ультразвукового преобразователя. Для исследования на наличие трещин всего объема образца необходимо перемещать преобразователь по его торцу, что требует времени и снижает производительность измерений. Кроме этого, фиксированный угол ввода акустической волны ограничивает дальность локации и зону обзора, что ограничивает возможности устройства в получении информации от дефектов, имеющих различную пространственную ориентацию. Существенным недостатком ближайшего аналога является также то, что это устройство позволяет исследовать только такие образцы, которые имеют вид балок и которые можно закрепить консольно.
Задачей, решаемой настоящим изобретением, является повышение производительности и достоверности обнаружения трещин путем их обнаружения из одного места локации по всем максимально возможным трассам локации за минимальное время.
Технический результат в части способа достигается за счет того, что в заявляемом способе нелинейного акустического обнаружения трещин и их местоположения так же, как и в ближайшем аналоге, в исследуемую конструкцию периодически излучают ультразвуковую волну, одновременно с этим в конструкции возбуждают низкочастотную вибрацию с амплитудой, достаточной для обеспечения взаимодействия на трещине ультразвуковой волны и низкочастотной вибрации, после чего осуществляют прием ультразвуковой волны и определяют амплитуду модуляции ультразвуковой волны, а о наличии и величине трещин судят по превышению амплитудой модуляции некоторого порогового значения, о местоположении же трещин судят по временной задержке распространения ультразвуковой волны.
Новым в заявляемом способе является то, что ультразвуковую волну последовательно излучают в конструкцию под различными углами ввода αi, где i=0, 1 ... k, изменяя угол αi от минимально необходимого угла α0 до максимально необходимого угла αk, формируя тем самым диапазон исследуемых дальностей, при этом для каждого значения угла ввода αi определяют текущее распределение значений амплитуды модуляции ультразвуковой волны от дальности, выполняя это, по крайне мере, для двух значений частот низкочастотной вибрации, после чего из полученных распределений для каждого угла ввода αi выбирают и регистрируют для каждой дальности только максимальные значения амплитуд модуляции ультразвуковой волны, по которым судят о наличии и величине трещин.
В первом частном случае реализации способа для всего диапазона установленных дальностей и частот низкочастотных вибраций, из всех зарегистрированных значений амплитуд модуляции для каждой дальности устанавливают значение амплитуды модуляции, соответствующее максимальному из всех возможных для данной дальности.
Во втором частном случае реализации способа целесообразно излучение и прием ультразвуковой волны осуществлять в узле колебаний возбуждаемой низкочастотной вибрации.
Технический результат в части способа достигается путем совместного использования двух эффектов. Первый эффект заключается в том, что для локации дефектов по всем максимально возможным трассам локации, ультразвуковая волна вводится в конструкцию под различными углами ввода, обеспечивающими взаимное перекрытие зон локации, что позволяет проводить локацию различных участков конструкции на различных дальностях из одного установочного места. На практике введение ультразвуковой волны в конструкцию под различивши углами от 0° (перпендикулярно поверхности конструкции) до критического угла 90° (вдоль поверхности) (см., например, кн. Методы акустического контроля металлов /Н.П.Алешин, В.Е.Белый, А.Х. Вопилкин и др.: Под. ред.Н.П.Алешина. - М.: Машиностроение, 1989. 456 с.) используется для того, чтобы получать отражения от различно ориентированных по отношению к падающей ультразвуковой волне дефектов, что позволяет избежать пропуска в их обнаружении. Как показали эксперименты, проведенные автором, используя ультразвуковой преобразователь с изменяемым углом ввода αi ультразвуковой волны, оказалось возможным производить локацию из одного места установки ультразвукового преобразователя для широкого диапазона дальностей - от минимальных, максимально близко расположенных к ультразвуковому преобразователю, до максимальных, соответствующих критическим углам распространения возбуждаемой ультразвуковой волны с максимально возможной дальностью, определяемой углом ввода, что существенно сокращает время проведения измерений для обнаружения трещин по сравнению с известными способами, когда ультразвуковой преобразователь с фиксированным углом ввода перемещают по поверхности изделия с определенным шагом.
Использование ультразвукового преобразователя с изменяемым углом ввода αi ультразвуковой волны дополнительно расширяет возможности способа за счет возможности обнаружения дефектов на участках конструкции, доступ к которым обычными ультразвуковыми преобразователями затруднен из-за конструктивных особенностей или особенностей эксплуатации конструкции. Например, для трубопроводов с изоляционным покрытием часто отсутствует возможность сделать надежный акустический контакт между ультразвуковым преобразователем и поверхностью при локации через изоляционное покрытие, которое в отдельных местах отслаивается и, следовательно, делает установку преобразователя на данном участке невозможной. Кроме этого, часть трубопровода может быть закрыта грунтом и его удаление для обеспечения доступа к нужному участку трубы для установки там ультразвукового преобразователя требует больших временных и финансовых затрат. Часто существуют условия, когда для локации объекта можно подготовить небольшой необходимый участок, обеспечивающий надежный акустический контакт, например, удалить небольшой участок изоляционного или теплоизолирующего покрытия и проводить локацию только с этого участка, но удаление всей изоляции для проведения контроля путем перемещения ультразвукового преобразователя по всей конструкции требует больших затрат времени и средств и экономически не оправдано. Изменяя угол ввода, можно решить все указанные проблемы путем локации труднодоступных участков с определенной, определяемой углом ввода ультразвуковой волны, дальности.
Второй эффект заключается в том, что для модуляции акустических характеристик трещин предлагается использовать непрерывное возбуждение конструкции низкочастотными колебаниями минимум на двух частотах. Это связано с тем, что возбуждение объекта на резонансной частоте приводит к возбуждению определенной моды колебаний конструкции, характеризующейся наличием узлов и пучностей колебаний. Модуляция трещины, находящейся в пучностях колебаний, приводит к максимальной модуляции ультразвуковой волны, а трещина, находящаяся в узле низкочастотных колебаний, не приводит к модуляции ультразвуковой волны и, следовательно, может быть не обнаружена и пропущена, что недопустимо. При изменении угла ввода ультразвуковой волны в значительных или максимально возможных пределах, в зону обнаружения с большой вероятностью попадут и узлы низкочастотных колебаний. Поэтому, чтобы избежать пропуска в модуляции трещин, необходимо последовательно возбуждать объект на нескольких (минимум - двух) частотах колебаний, что приведет к изменению положения узловых линий низкочастотных колебаний. Однако хотя бы для одной из частот низкочастотного возбуждения трещина не будет находиться в узле колебаний и, следовательно, она будет модулировать ультразвуковую волну и обнаруживаться. Для каждой из частот возбуждения определяется уровень модуляции сигнала принятой ультразвуковой волны и из значений модуляции для каждой частоты возбуждения и каждой дальности локации достоверным будет максимальный полученный уровень модуляции, поэтому в предлагаемом способе используется определение (выбор) и регистрация только максимальных (пиковых) значений амплитуд модуляции.
Таким образом, технический результат, обеспечиваемый разработанным способом и заключающийся в том, что из одного места локации путем изменения угла ввода αi ультразвуковой волны обнаруживают трещины по всем возможным трассам локации за минимальное время, позволяет повысить производительность измерений, в то же время проведение измерений минимум для двух значений частот низкочастотной вибрации позволяет избежать пропусков в обнаружении трещин, то есть позволяет повысить достоверность их обнаружения.
Изменение угла ввода ультразвуковой волны позволяет также получить дополнительный технический результат, заключающийся в пространственной селекции дефектов, позволяющий увеличить достоверность проведения измерений при локации двух и более дефектов. Очевидно, что, если по трассе локации расположено два дефекта, для распознавания трещин важно, какой дефект первый, а какой второй. Если первый дефект полость, то отраженная от него ультразвуковая волна не будет промодулирована и по модуляции волны, отраженной от второго дефекта, можно определить полость это (модуляции нет) или трещина (модуляция есть). Если же первый дефект трещина, то отраженная от него волна будет промодулирована, но также будет промодулирована и ультразвуковая волна, прошедшая ко второму дефекту, и значит, отражение от второго дефекта также будет промодулировано независимо от того трещина это или полость. Изменяя угол ввода, можно существенно уменьшить или даже исключить отражение от первого дефекта, изменив трассу локации таким образом, что распространяющаяся ультразвуковая волна не заденет его, и таким образом избежать модулирования на этом дефекте ультразвуковой волны и, следовательно, облучать второй дефект немодулированной волной. Уровень модуляции в принятой волне от второго дефекта покажет, что это трещина (модуляция есть) или полость (модуляции нет). Таким образом, изменение угла ввода повышает достоверность обнаружения типа одиночного дефекта при локации группы дефектов.
Дополнительный технический результат в первом частном случае реализации способа, заключающийся в ускорении построения распределения трещин для всего объема конструкции, достигается за счет того, что результат обнаружения трещин для всех углов ввода объединяют в единый результат, позволяющий регистрировать наличие трещин для всех установленных дальностей локации.
Дополнительный технический результат во втором частном случае реализации способа, заключающийся в уменьшении модуляции ультразвуковой волны в месте ее излучения и приема, достигается за счет того, что ультразвуковую волну излучают и принимают в узле низкочастотных колебаний конструкции для каждой моды возбужденных колебаний, где вибрации поверхности конструкции отсутствуют. Такая особенность излучения и приема ультразвуковой волны уменьшает вероятность ее модуляции в месте контакта «преобразователь - поверхность конструкции». Отсутствие модуляции в момент излучения и приема увеличивает достоверность обнаружения трещины, так как она облучается немодулированной волной и, следовательно, не имеет дополнительной побочной модуляции.
Технический результат, обеспечиваемый заявляемым изобретением в части устройства, достигается за счет того, что заявляемое устройство для нелинейного акустического обнаружения трещин и их местоположений, так же как и ближайший аналог, содержит, по крайне мере, один ультразвуковой преобразователь, ультразвуковой эхолокатор, а также блок возбуждения низкочастотных колебаний, содержащий последовательно соединенные генератор низкой частоты и вибратор, приведенный в контакт с поверхностью исследуемой конструкции с помощью сопрягаемого элемента, при этом выход ультразвукового эхолокатора соединен с блоком обработки информации.
Новым в заявляемом устройстве является то, что в нем установлены блок управления и электронный узел изменения угла ввода ультразвуковой волны, выполненный в виде акустической призмы с установленной на ее поверхности матрицей из n ультразвуковых преобразователей и соединенного с ними блока коммутации, соединенного также с блоком управления и ультразвуковым эхолокатором, который подключен к блоку обработки информации, с которым соединен также и блок управления, при этом блок коммутации выполнен с возможностью одновременной поэлементной коммутации m (m<n) ультразвуковых преобразователей.
В первом частном случае изготовления устройства целесообразно в качестве блока управления использовать компьютер из блока обработки информации.
Во втором частном случае изготовления устройства его целесообразно снабдить блоком поворота акустической призмы вокруг оси, совпадающей с нормалью к поверхности конструкции в месте контакта с ней акустической призмы.
В третьем частном случае изготовления устройства акустическую призму целесообразно выполнить симметричной и матрицу ультразвуковых преобразователей расположить на ее поверхности также симметрично, обеспечивая ввод ультразвуковой волны не только под разными углами, но и в разных направлениях.
Дополнительный технический результат, обеспечиваемый разработанным устройством, заключается в том, что изменение угла ввода ультразвуковой волны осуществляется очень быстро, по сравнению с известными устройствами, за счет электронной перестройки, проводимой с блока управления, что также повышает производительность измерений.
Дополнительным преимуществом разработанного устройства является также то, что локацию одного и того же дефекта можно проводить из различных мест установки акустической призмы, при различных взаимных ориентациях трещины и направления локации, что увеличивает достоверность обнаружения трещин, ориентированных к направлению локации под разными углами, по крайне мере, для одного из выбранных мест установки акустической призмы.
На чертеже приведена блок-схема разработанного устройства для обнаружения трещин и их местоположений в конструкции.
В общем случае реализации в соответствии с п.4 формулы изобретения устройство для нелинейного акустического обнаружения трещин и их местоположений содержит блок возбуждения 1 низкочастотных колебаний, блок управления 2, электронный узел 3 изменения угла ввода ультразвуковой волны, выполненный в виде акустической призмы 4 с установленной на ее поверхности матрицей ультразвуковых преобразователей 5, состоящей из n преобразователей, и соединенного с ними блока коммутации 6. Блок коммутации 6 соединен также с блоком управления 2 и ультразвуковым эхолокатором 7, который подключен к блоку обработки информации 8, с которым соединен также и блок управления 2. Блок возбуждения 1 низкочастотных колебаний содержит генератор 9 низкой частоты, соединенный с вибратором 10, который посредством сопрягающего элемента 11 контактирует с поверхностью исследуемой конструкции. Блок обработки информации 8 выполнен, например, из соединенных последовательно аналого-цифрового преобразователя 12 и компьютера 13. Ультразвуковой эхолокатор 7 выполнен с возможностью работы в режиме эхолокации, при котором его первый выход и вход объединены и подключены к матрице ультразвуковых преобразователей 5 через блок коммутации 6. Блок коммутации 6 выполнен с возможностью одновременной поэлементной коммутации m (m<n) ультразвуковых преобразователей 5.
В первом частном случае изготовления устройства функции блока управления 2 может выполнить компьютер 13.
Во втором частном случае изготовления устройства в него дополнительно введен блок поворота акустической призмы 4 вокруг оси, совпадающей с нормалью к поверхности конструкции в месте контакта с ней акустической призмы 4 (на чертеже блок поворота не показан).
В третьем частном случае изготовления устройства акустическая призма 4 выполнена симметричной, а матрица ультразвуковых преобразователей 5 расположена на ее поверхности также симметрично с тем, чтобы вводить ультразвуковую волну в конструкцию не только под разными углами αi, но и в разных направлениях.
Описание узлов, используемых в устройстве.
В качестве генератора низкой частоты 9 может использоваться любой низкочастотный генератор, например Г3-118, Г3-56 или Г3-112.
В качестве вибратора 10 может использоваться стандартный вибростенд электромагнитного типа, например фирмы Роботрон типа 11077, с соответствующим ему усилителем мощности LV-103.
В качестве сопрягающего элемента 11 может использоваться переходное устройство в виде отрезка металлического стержня или трубы, один конец которого зафиксирован в подвижном элементе вибратора 10, а второй закреплен, например с помощью магнита или клея, на конструкции. В частном случае, при размещении вибростенда на конструкции, роль сопрягающего элемента может выполнять корпус вибростенда, который под действием собственного веса прижимается к поверхности конструкции и передает на нее вибрации.
В качестве акустической призмы 4 может использоваться призма из оргстекла в виде сегмента цилиндра, в которую с помощью матрицы ультразвуковых преобразователей 5 излучается ультразвуковая волна.
В качестве матрицы ультразвуковых преобразователей 5 может использоваться матрица из 15-20 ультразвуковых преобразователей из пьезокерамики типа ЦТС-19. Каждый преобразователь имеет размеры, например 10×1,5×0,8 мм3. Ультразвуковые преобразователи приклеиваются вплотную друг к другу на цилиндрическую поверхность акустической призмы 4 эпоксидной смолой таким образом, что они образуют матрицу преобразователей.
Блок управления 2 состоит из переключателей, предназначенных для управления подключением ультразвуковых преобразователей 5 через блок коммутации 6 к ультразвуковому эхолокатору 7. В простейшем случае это переключатели следующих положений: начальная установка, сдвиг на один ультразвуковой преобразователь вправо и сдвиг на один ультразвуковой преобразователь влево, что обеспечивает выбор соответствующего значения угла αi. В качестве переключателей могут использоваться тумблеры (например, П2К) или клавиатурные кнопки, обеспечивающие выработку управляющих напряжений для управления работой микросхем ТТЛ или КМОП логики. Для согласования уровней управляющих сигналов могут использоваться микросхемы типа К555ЛА3, Л561ЛА7 и др.
В качестве блока коммутации 6 может использоваться блок, состоящий из нескольких соединенных узлов, задача которых заключается в том, чтобы по сигналу с блока управления 2 последовательно коммутировать подключение любых m ультразвуковых преобразователей 5 из общего их числа n к ультразвуковому эхолокатору 7. Первый узел может быть изготовлен, например, в виде сдвигающего регистра, выполненного на микросхеме типа К155ИР13 или К555ИР16, работающей в режиме параллельной записи данных и сдвига данных при их выводе в одну и другую сторону. Второй узел составляют n ключей, через которые n ультразвуковых преобразователей матрицы ультразвуковых преобразователей 5 подключены к ультразвуковому эхолокатору 7. В качестве ключей можно использовать, например, аналоговые ключи типа ADG441 фирмы Analog Devices или реле типа РЭС-49. Выходы регистров подключены к управляющим входам n ключей, вход которых подключен к ультразвуковому эхолокатору 7, а выход к каждому из n ультразвуковых преобразователей 5. Блок коммутации 6 выполняет следующую функцию. По сигналу начальной установки с блока управления 2 происходит запись слова состоящего из m бит в регистр блока коммутации 6. При этом первые m преобразователей 5 (от П0 до Пm), обеспечивающие угол ввода α0, подключаются к ультразвуковому эхолокатору 7. По сигналу сдвига с блока управления 2 происходит сдвиг сигналов в регистре и к ультразвуковому эхолокатору 7 подключаются преобразователи 5 с шагом в один преобразователь, т.е. подключатся преобразователи от П1 до Пm+1, обеспечивающие ввод ультразвуковой волны в конструкцию под углом α1. Сдвиг осуществляется до перебора всех углов ввода αi от α0 до αn. Используя возможность реверсировать направление изменения сдвига данных, можно изменять направление изменение угла ввода ультразвуковой волны.
В качестве импульсного ультразвукового эхолокатора 7 может использоваться любой импульсный локатор, например стандартный дефектоскоп УД-12, или дефектоскопы фирм Панаметрик или Крауткрамер (http://krautkramer.ipc.ru/Defekt.htm). Частота излучаемой ультразвуковой волны определяется частотой матрицы ультразвуковых преобразователей 5 и обычно лежит в диапазоне 1÷10 МГц.
В качестве платы АЦП 12 может использоваться любая высокоскоростная плата АЦП, например плата аналого-цифрового преобразователя фирмы «Инструментальные системы» (г.Москва) типа ADM214×100M или фирмы L-card (г.Москва) типа L-1211.
В качестве компьютера 15 может использоваться любой компьютер, позволяющий вставить в корпус соответствующую плату АЦП, например класса Pentium 2, 3, 4.
В примере конкретной реализации устройства в качестве ультразвукового эхолокатора 7 использовался модифицированный дефектоскоп УД-12, имеющий частоту повторения 1248 Гц и частоту локации 3 МГц. Излучаемый импульс ультразвуковой волны с ультразвукового эхолокатора 7 равен по длительности 8 периодам частоты локации. В качестве исследуемой конструкции использовался фрагмент трубопровода диаметром 1420 мм, длиной 2100 мм и толщиной стенки 17 мм. Вдоль шва трубопровод имеет области, в которых расположены КРН (Коррозионное Растрескивание под Напряжением) трещины, образующиеся в процессе эксплуатации трубопровода под воздействием его механических напряжений. Дополнительно на поверхности трубы были изготовлены два модельных эталонных объекта: трещина (нелинейный) и полость (линейный). Для возбуждения трубы низкочастотной вибрацией на ее поверхности устанавливался вибростенд фирмы Роботрон типа 11077, его возбуждение производилось усилителем мощности LV-103 (Роботрон), на который подавался сигнал с низкочастотного генератора Г3-118. Труба возбуждалась на резонансной частоте Ω0=78 Гц. Для модельных экспериментов распределение вибраций по поверхности трубы выбрано таким, что трещины находились в пучности низкочастотных колебаний. Это позволило для экспериментов использовать возбуждение трубы только на одной частоте Ω0. Акустическая призма 4 располагалась на расстоянии 30-40 см от трещин и изменением угла ввода αi проводилось определение модуляции принятой ультразвуковой волны для принятого сигнала по всем трассам локации.
В качестве акустической призмы 4 использован цилиндрический сегмент с окружностью 160° с плоским основанием, выполненный из диска оргстекла толщиной 17 мм и диаметром 50 мм. На его поверхность с помощью эпоксидной смолы приклеено 15 ультразвуковых преобразователей из пьезокерамики ЦТС-19. Каждый преобразователь имеет размеры 10 мм × 1,5 мм × 0,8 мм. Блок управления 2 изготовлен на базе матрицы из микропереключателей типа МП 11, с помощью которых формируются управляющие сигналы на выходах микросхемы К555ЛАЗ. Сформированные сигналы подаются на сдвигающий регистр, выполненный на базе двух микросхем К555ИР13. С помощью сигналов на выходе этих микросхем происходит подключение 8 ультразвуковых преобразователей из матрицы ультразвуковых преобразователей 5 к ультразвуковому эхолокатору 7. Подключение осуществляется с помощью 15 миниатюрных реле типа РЭС49.
Сигнал принятой ультразвуковой волны вводился в компьютер 13 класса Celeron 2,4 ГГц через плату АЦП 12 типа ADM214×100M фирмы «Инструментальные системы» (г.Москва). Для записи сигналов с ультразвукового эхолокатора 7, синхронизации работы платы АЦП 12 с эхолокатором 7 и обработки данных в компьютере 13 использованы стандартные пакеты прикладных программ записи и обработки сигналов.
Синхронно с излучаемым ультразвуковым импульсом в память компьютера 13 записывался сигнал принятой ультразвуковой волны. Для одного положения угла ввода αi записывалось 512 временных реализаций, соответствующих разным фазам колебания трубы. Длительность каждой временной реализации составляла 1024 отсчета по дальности. Для каждой дальности рассчитывался спектр Фурье, по которому затем определялись амплитуды гармоник частоты Ω0. Максимальные, пиковые значения уровня модуляции и амплитуды отраженного сигнала запоминались и регистрировались. По зарегистрированным значениям амплитуды модуляции и априорно измеренному уровню модуляции для бездефектного участка трубы определялось наличие и местоположение трещин по трассе локации для всех углов ввода αi ультразвуковой волны. Поскольку при измерении определяется не только амплитуда принятой ультразвуковой волны, но и ее модуляция, то метод дополнительно позволяет повысить информативность измерений путем одновременного представления результатов как линейной, так и нелинейной локации. В результате на экране строилось две зависимости: «максимальное значение амплитуды принятой ультразвуковой волны - дальность», соответствующая линейной локации, и "амплитуда модуляции - дальность", соответствующая нелинейной локации. При этом распределение амплитуды принятой ультразвуковой волны вдоль трассы локации (линейная локация) показывает наличие всех дефектов, кроме сомкнутых трещин не дающих отражения, а распределение амплитуды модуляции от дальности (нелинейная локация) показывает наличие только трещин, в том числе и сомкнутых трещин. Обе зависимости позволяют получить дополнительную информацию о типе дефектов, распределении границ трещин, наличии закрытых трещин и обладают большими информационными возможностями. Было получено, что для отражения от полости (каверны или модельной полости) модуляция отсутствует, а для модельной трещины и КРН трещин - присутствует. Причем для КРН трещин коэффициент модуляции меньше, чем для модельной трещины, что хорошо согласуется с априорными данными о параметрах трещины и с визуальными наблюдениями.
Проведенные автором эксперименты по локации дефектов в трубопроводе показали, что, изменяя с помощью блока управления 2 угол ввода αi ультразвуковой волны, оказалось возможным получать отражения от различных дальностей локации вплоть до 2-х метров при локации вдоль трубы и на полдиаметра трубы при локации по окружности трубы. Это означает, что, лоцируя из одного места крепления акустической призмы 4 и изменяя угол αi ввода ультразвуковой волны, можно проводить обзор дефектов по всей окружности и вдоль трубы. Причем для каждого угла ввода αi существует максимальная амплитуда отражения, соответствующая определенной дальности. Этот факт означает, что, изменяя угол ввода, можно достаточно быстро, по сравнению с известным случаем, когда для изменения области локации ультразвуковой преобразователь каждый раз нужно переставлять по поверхности, обследовать дефекты в трубе на различных дальностях от акустической призмы 4, отличая полость от трещины, т.е. можно решить поставленную задачу.
Разработанный способ реализуют следующим образом (см. фиг.1). Акустическую призму 4, с размещенной на ней матрицей из n ультразвуковых преобразователей 5, устанавливают на поверхности конструкции (показано ее сечение), а матрицу ультразвуковых преобразователей 5 подключают к блоку коммутации 6. По сигналу начальной установки с блока управления 2 посредством блока коммутации 6 подключают m первых ультразвуковых преобразователей (от По до Пm) матрицы ультразвуковых преобразователей 5 к ультразвуковому эхолокатору 7. Этим устанавливают минимально необходимый угол ввода α0 ультразвуковой волны. При этом импульсный сигнал с ультразвукового эхолокатора 7 направляют на m ультразвуковых преобразователей 5 матрицы и излучают в конструкцию ультразвуковую волну с углом ввода α0. Ультразвуковую волну, отраженную от внутренних дефектов конструкции (трещины, полости), принимают этими же ультразвуковьми преобразователями 5. Принятый сигнал с выхода ультразвукового эхолокатора 7 направляют в блок обработки информации 8. В блоке обработке информации 8 принятый сигнал проходит через плату аналого-цифрового преобразователя 12, преобразующего аналоговый сигнал в цифровой код с определенной частотой дискретизации, который далее записывается в компьютер 13. Одновременно с введением ультразвуковой волны в конструкции возбуждают низкочастотную вибрацию с помощью блока возбуждения низкочастотных колебаний 1. Для этого сигнал установленной резонансной частоты Ω0 с генератора низкой частоты 9 подают на вибратор 10, передающий свои колебания конструкции через сопрягающий элемент 11. При наличии в конструкции трещин акустические характеристики трещин изменяются под действием возбужденных колебаний с частотой Ω0, при этом распространяющаяся в конструкции ультразвуковая волна модулируется на трещине этими колебаниями частоты Ω0. Сигнал принятой ультразвуковой волны обрабатывают с целью обнаружения в нем модуляции на частоте Ω0 для различных дальностей локации dp, где dp изменяется от нулевого значения до максимального значения дальности dmax, с шагом, определяемым скоростью ультразвуковой волны в конструкции, частотой дискретизации платы АЦП 12 и углом ввода α0 ультразвуковой волны. Вычисленную для угла ввода α0 амплитуду модуляции A0(dp, Ω0>α0) для каждой дальности локации dр регистрируют. Далее по сигналу с блока управления 2 к ультразвуковому эхолокатору 7 подключают следующие m преобразователей (от П1 до Пm+1), изменяя этим угол ввода на α1. Для этого угла ввода α1 также определяют и регистрируют амплитуду модуляции A1(dp, Ω0, α1) для каждой дальности локации. Операцию повторяют до тех пор, пока не будут установлены все возможные углы ввода αi от α0 до αn и зарегистрированы все амплитуды модуляции Ai(dp, Ω0, αi), то есть сформирован диапазон исследуемых дальностей. Затем измерения повторяют, по крайне мере, еще для одного значения частоты Ω1 и определяют для нее изменение модуляции сигнала ультразвуковой волны A(dp, Ωi, αi). Из полученных распределений для каждого угла ввода αi выбирают и регистрируют для каждой дальности локации только максимальные значения амплитуд модуляции ультразвуковой волны A(dp, αi). В первом приближении амплитуда модуляции пропорциональна геометрическим размерам трещины. По превышению установленным распределением A(dp, αi) для всех дальностей порогового уровня, определенного для бездефектной конструкции, судят о наличии, величине и местоположениях трещин из одного места локации за минимальное время, требуемое для обнаружения трещин в выбранном объеме конструкции, и с максимальной достоверностью измерений.
В одном частном случае реализации способа для ускорения построения распределения трещин во всем лоцируемом объеме конструкции зарегистрированные распределения A(dp, αi) объединяют в единый результат A(dp). Для этого для каждой дальности устанавливают значение амплитуды модуляции, соответствующее максимальному из всех возможных для данной дальности.
В другом частном случае реализации способа для увеличения чувствительности измерений путем уменьшения порогового уровня, определенного для бездефектной конструкции, излучение и прием ультразвуковой волны осуществляют в узле колебания возбуждаемой низкочастотной вибрации.
Для дополнительного увеличения производительности измерений акустическую призму 4 поворачивают вокруг оси, совпадающей с нормалью к конструкции в месте контакта с ней акустической призмы 4, что позволяет осуществлять секторное сканирование. Используя симметрично изготовленную акустическую призму 4, позволяющую с помощью расположенной на ней матрицы ультразвуковых преобразователей 5 вводить ультразвуковую волну в разных направлениях, с разными углами ввода, дополнительно сокращают время измерения, поскольку для обеспечения обзора конструкции акустическую призму 4 достаточно поворачивать не на 360°, а только на 180°.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ УЛЬТРАЗВУКОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ТРЕЩИН И ИХ МЕСТОПОЛОЖЕНИЙ В ТВЕРДОМ ТЕЛЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2280863C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ МИКРОДЕФЕКТОВ В ЛИСТОВОМ СТЕКЛЕ | 2009 |
|
RU2390770C1 |
| НЕЛИНЕЙНЫЙ МОДУЛЯЦИОННЫЙ СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2799241C1 |
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗДЕЛИЙ | 2015 |
|
RU2616758C1 |
| Способ неразрушающего контроля на основе магнитно-резонансного эффекта для определения наличия дефектов сплошности и локальной структурной неоднородности в металлопрокате, изготовленном из ферромагнитных сплавов, и устройство для его осуществления | 2024 |
|
RU2824299C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327498C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| Способ ультразвуковой дефектоскопии трубопровода | 2024 |
|
RU2834582C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ПАРАМЕТРИЧЕСКОЙ АКУСТИЧЕСКОЙ ИЗЛУЧАЮЩЕЙ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2784885C1 |
Изобретение относится к области обнаружения локальных дефектов в твердых телах с помощью ультразвуковых волн и может быть использовано для обнаружения трещин в листах, емкостях и трубопроводах. Технический результат: увеличение производительности измерений и их достоверности за счет обеспечения обнаружения трещин в указанных конструкциях из одного места локации ультразвуковой волной по всем возможным трассам локации за минимальное время. Сущность: в конструкцию периодически излучают ультразвуковую волну, последовательно меняя ее угол ввода αi, от минимально необходимого до максимального, формируя тем самым диапазон исследуемых дальностей. Для каждого значения угла ввода αi определяют текущее распределение значений амплитуды модуляции ультразвуковой волны от дальности, по крайней мере, для двух частот низкочастотной вибрации, которую возбуждают в конструкции. Из полученных распределений выбирают и регистрируют для каждой дальности только максимальные значения амплитуд модуляции ультразвуковых волн. По ним судят о наличии и величине трещин. О местоположении трещин судят по временной задержке распространения ультразвуковой волны. В устройстве установлены блок управления и электронный узел изменения угла ввода ультразвуковой волны, выполненный в виде акустической призмы с установленной на ее поверхности матрицей из n ультразвуковых преобразователей и соединенного с ними блока коммутации. Блок коммутации выполнен с возможностью одновременной поэлементной коммутации m (m<n) ультразвуковых преобразователей и соединен с блоком управления и ультразвуковым эхолокатором. Эхолокатор подключен к блоку обработки информации, с которым соединен также и блок управления. Блок возбуждения низкочастотных колебаний содержит последовательно соединенные генератор низкой частоты и вибратор. 2 н. и 5 з.п. ф-лы, 1 ил.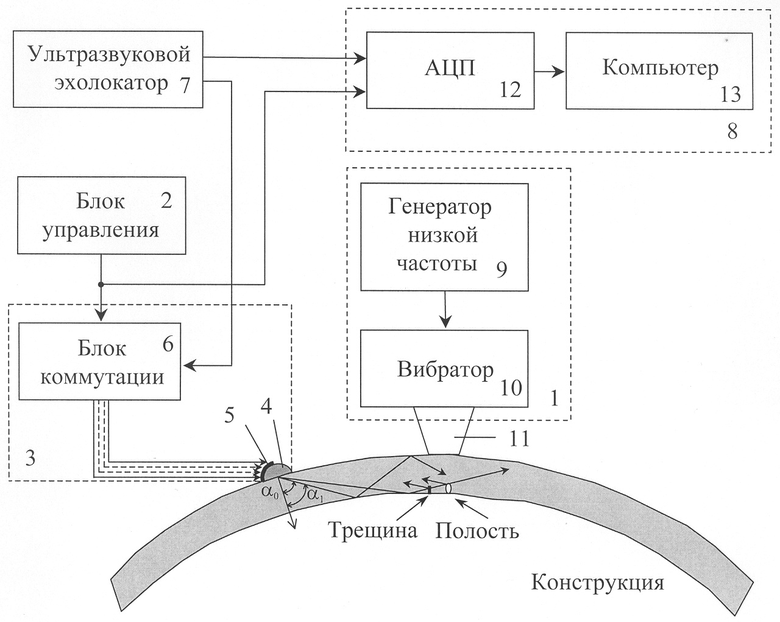
| US 6301967 А, 16.10.2001 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ТРЕЩИН В ТВЕРДОМ ТЕЛЕ | 2002 |
|
RU2219538C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ СЛОЖНУЮ ФОРМУ ТЕЛ ВРАЩЕНИЯ | 1993 |
|
RU2086975C1 |
| Акустический способ контроля качества изделий | 1988 |
|
SU1603291A1 |
| US 736642 A, 07.04.1998. | |||

