Предлагаемое изобретение относится к системам управления, в частности к моделированию электромеханических приводов, и предназначено для полунатурного моделирования электромеханического привода при проведении отработок и сдаче штатных аппаратно-программных средств системы управления, имеющих в своем составе аппаратуру контроля положения привода, управляющий контроллер, работающий по штатной программе, и аппаратуру силового управления приводом, в части функций контроля положения привода и управления приводом, в условиях, близких к реальным.
Сложные объекты управления часто включают в себя специализированные привода исполнительных механизмов, которые обычно содержат в своем составе двигатели, редукторы и каналы контроля положения. При разработке систем управления обычно известны только технические характеристики подобных приводов, однако сами привода могут находиться на различных стадиях проектирования и изготовления. Для проведения отработки и сдачи штатных аппаратно-программных средств системы управления, в части функций контроля положения и управления приводом, на различных этапах их проектирования и изготовления, важную роль приобретает разработка устройств для моделирования приводов. Подобные устройства должны обеспечивать реальные условия работы и контроль технических характеристик аппаратуры управления приводом (управляющего контроллера, работающего по штатной программе, и аппаратуры силового управления приводом), моделировать наличие кинематических связей в приводе, сигналы датчиков положения и типовые неисправности для контроля аппаратуры управления в неспецифицированных режимах работы, а также выявлять ошибки в работе аппаратуры управления. Включение самих приводов в состав комплексов для проведения отработки и сдачи системы управления не всегда возможно, особенно на предварительных стадиях проектирования и отладки, а создание упрощенных электромеханических эквивалентов приводов не обеспечивает полноту проверок аппаратуры в части силовых нагрузок и временных диаграмм сигналов управления.
Известно устройство для моделирования привода [1] предназначенное для моделирования привода программного управления при отработке и сдаче аппаратуры управления приводом.
Недостатком указанного устройства является несоответствие входной характеристики имитатора динамической характеристике входных цепей реального привода, что не позволяет провести отработку аппаратуры силового управления с учетом реальных силовых нагрузок.
Известно устройство для моделирования N-разрядного цифрового электрогидравлического привода с мажоритированием управляющих сигналов [2]. Устройство состоит из модели обмоток электромагнитного механизма и модели гидравлического привода. Устройство обеспечивает контроль входного сигнала управления и формирование сигнала положения привода в зависимости от поступающих от аппаратуры силового управления команд на управление приводом в условиях, близких к реальным.
Указанное устройство [2] является наиболее близким по технической сущности и принято за прототип.
Недостатками указанного устройства являются:
- невозможность отработки штатной аппаратуры контроля положения привода с использованием указанного устройства, так как в нем отсутствуют блоки имитации сигналов датчиков положения привода, входящих в состав реального привода;
- невозможность имитации неисправностей привода, что не позволяет провести контроль технических характеристик аппаратуры управления в неспецифицированных режимах работы;
- невозможность работы совместно с реальным приводом, что необходимо для аттестации модели привода и отработки и сдачи аппаратуры управления при работе с реальным приводом;
- сложность изменения алгоритмов контроля входных сигналов управления и алгоритмов формирования сигнала положения ввиду аппаратной реализации модели привода.
Задачей, стоящей перед авторами, являлось создание устройства для моделирования электромеханического привода.
Для решения указанной задачи в устройство, содержащее модель обмоток электромагнитного механизма и модель привода, дополнительно введены блок имитации сигналов датчиков положения, блоки имитации отказов, по числу обмоток электромагнитного механизма, и блоки преобразования токов, по числу обмоток электромагнитного механизма, при этом модель обмоток электромагнитного механизма подключается последовательно к блокам имитации отказов и блокам преобразования токов внешним жгутом, а модель привода состоит из блока вычислительных средств и блока индикации и управления.
Техническим результатом изобретения является повышение глубины контроля аппаратно-программных средств системы управления и точности моделирования электромеханического привода, так как для выходных каскадов аппаратуры силового управления практически воспроизводятся реальные условия их работы, в том числе возможные неисправности в приводе, и имитируются сигналы ГД положения привода и концевых выключателей НКВ1 и НКВ2, входящих в состав привода, в кинематической связи с сигналами управления, а также обеспечена возможность работы устройства моделирования совместно с реальным приводом для аттестации устройства.
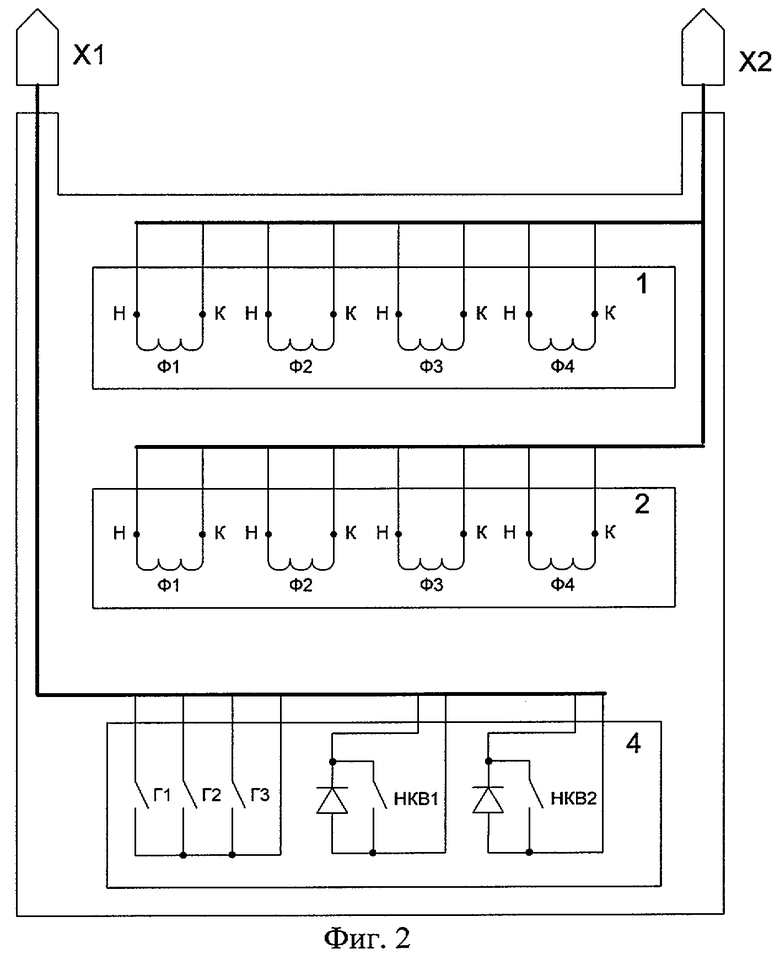
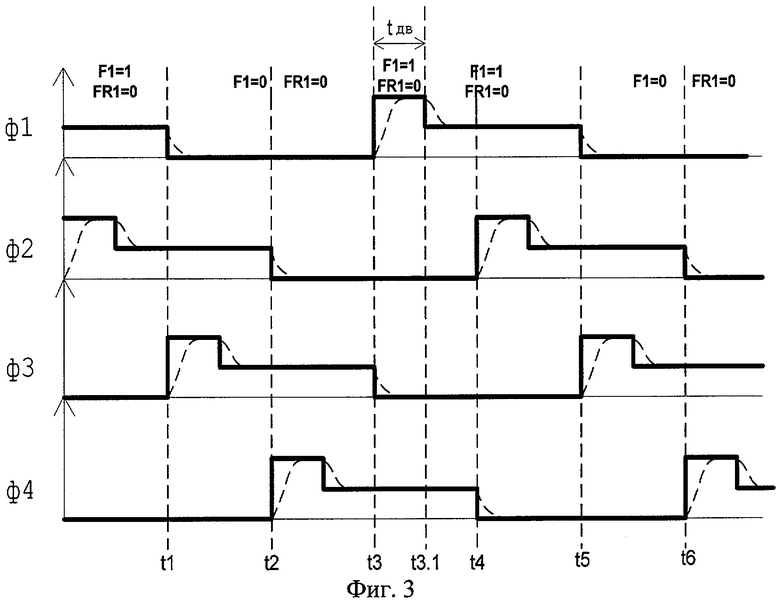
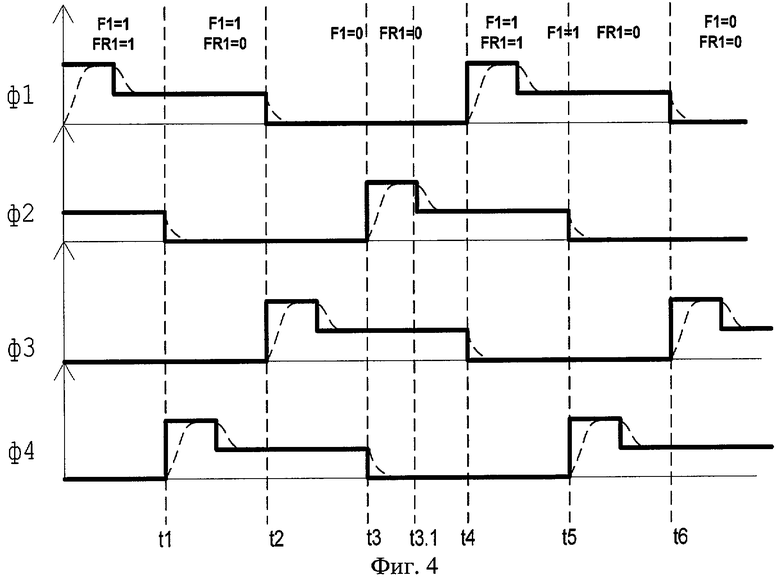
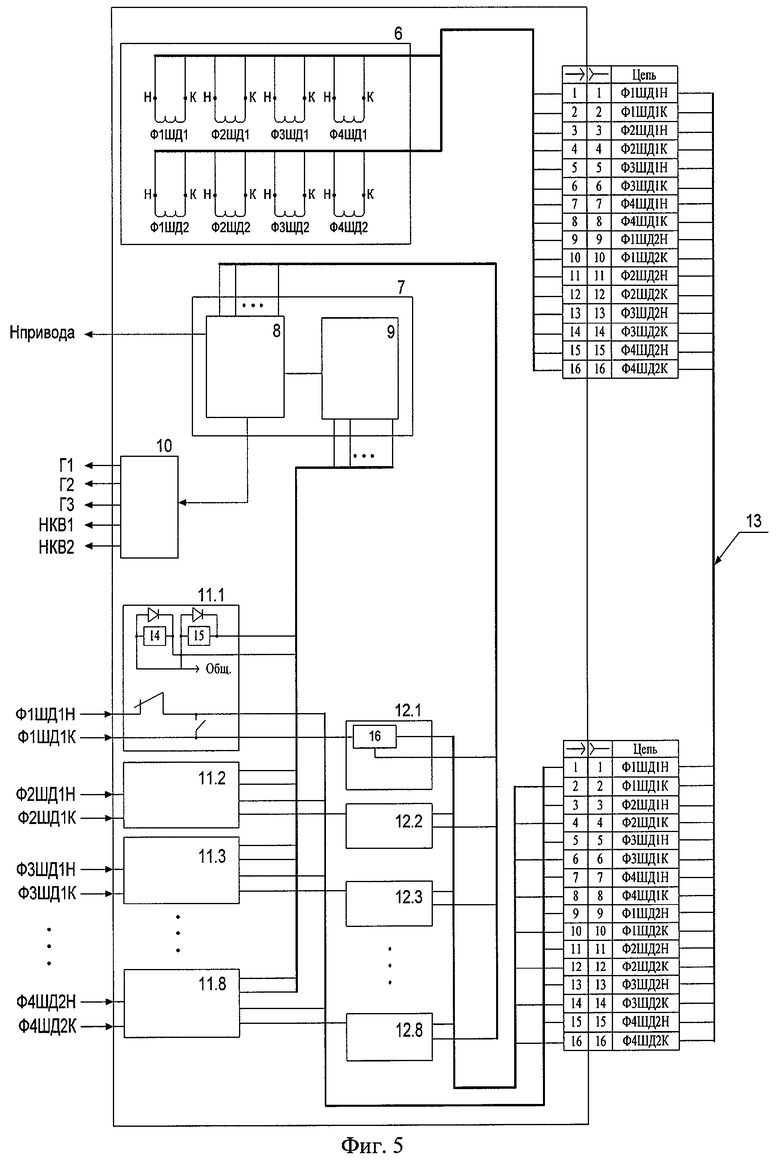
На фиг.1 представлена кинематическая схема электромеханического привода; на фиг.2 - схема электрическая принципиальная электромеханического привода; на фиг.3 - диаграммы токов в обмотках шагового двигателя при перемещении привода "вперед"; на фиг.4 - диаграммы токов в обмотках шагового двигателя при перемещении привода "назад"; на фиг.5 - структурная схема устройства для моделирования электромеханического привода; на фиг.6 - лицевая панель блока управления и индикации; на фиг.7 - граф переходов автомата формирования сигнала положения привода.
Электромеханический привод (фиг.1) состоит из двух одинаковых четырехобмоточных шаговых двигателей (ШД) 1 и 2, с попарной коммутацией обмоток, дифференциального редуктора 3, обеспечивающего сложение перемещений от двух ШД, герконового датчика (ГД) 4 положения привода и ходового винта 5. Каждый из ШД 1 и 2 содержит в своем составе четыре обмотки - Ф1, Ф2, Ф3 и Ф4 (фиг.2). В состав ГД 4 входят три геркона Г1, Г2 и ГЗ и два концевых выключателя НКВ1 и НКВ2, срабатывающих при достижении крайнего нижнего положения. Вращение ротора каждого из ШД 1 и 2 осуществляется путем попарной коммутации обмоток соответствующего ШД. Направление перемещения ходового винта 5 определяется направлением чередования импульсов тока подаваемых в обмотки ШД аппаратурой управления. При движении "вперед", последовательность подачи токов в обмотки ШД выглядит следующим образом: Ф1 Ф2-Ф2 Ф3-Ф3 Ф4-Ф4 Ф1-Ф1 Ф2..., а при движении "назад" - Ф4 Ф3-Ф3 Ф2-Ф2 Ф1-Ф1 Ф4-Ф4 Ф3... Используемые в приводе ШД имеют максимальный момент, когда рабочий ток присутствует в двух фазах. При одновременном поступлении тока в три фазы каждого двигателя момент резко уменьшается, а при наличии тока в четырех фазах - практически становится равным нулю.
Реальные токи в обмотках в моменты их включения/выключения не изменяются мгновенно, а имеют место переходные процессы, показанные на фиг.3 и 4 пунктиром. При разработке аппаратуры силового управления введены понятия тока движения и тока удержания. На фиг.3 и 4 импульс тока с большей амплитудой соответствует току движения, а ток с меньшей амплитудой - току удержания. Рассмотрим момент передвижения привода на один шаг в момент t3-t4. Во вновь включаемую обмотку Ф1 на время tдв подается ток движения, а на смежной с ней, отключаемой обмотке Ф4, еще присутствует ток удержания. После спада значения тока движения в обмотке Ф1 в значение тока удержания, в обмотке Ф4 еще присутствует ток удержания и привод удерживается в текущем состоянии в течении времени t3.1-t4. Таким образом, для передвижения привода на один шаг в одну обмотку должен быть подан ток движения, а для удержания привода в двух смежных обмотках должен присутствовать ток удержания. Крутизна переднего фронта импульса тока во включаемой обмотке и заднего фронта импульса тока в отключаемой обмотке определяется электромагнитными характеристиками обмоток ШД. Качество управления шаговыми двигателями (плавность хода двигателя, отсутствие ударов при коммутации обмоток и т.д.) зависит от характеристик аппаратуры управления (длительность включения обмоток в ток движения, алгоритм коммутации обмоток и режимы работы выходных ключей аппаратуры силового управления). Программные переменные F1...F4 и FR1...FR4 используются в алгоритмах формирования положения привода и контроля работы аппаратуры управления и отражают включение соответствующих обмоток в ток удержания и движения соответственно.
Устройство для моделирования электромеханического привода должно обеспечивать:
- контроль соответствия технических характеристик аппаратуры управления электромеханическим приводом характеристикам, указанным в технических условиях на эту аппаратуру, с учетом индуктивного характера нагрузок и режимов работы выходных ключей, в том числе в условиях типовых неисправностей в приводе;
- контроль аппаратуры контроля положения электромеханического привода, входящей в состав системы управления, посредством имитации сигналов ГД положения привода и концевых выключателей (НКВ1 и НКВ2), входящих в состав привода, в кинематической связи с управляющими сигналами на исполнительный механизм, а также формирование сигнала положения привода для использования его в модели объекта управления;
- отработку аппаратно-программных средств системы управления совместно с реальным приводом с целью аттестации устройства;
- возможность модификации алгоритмов контроля аппаратуры управления, формирования положения привода и имитации сигналов ГД положения привода и концевых выключателей с незначительными затратами. Алгоритмы контроля работы аппаратуры управления должны обеспечивать:
- контроль парности включения обмоток ШД;
- контроль числа включенных одновременно обмоток;
- контроль очередности включения обмоток;
- контроль ограниченной длительности включения обмотки в ток движения;
- контроль уровня сигналов управления от аппаратуры силового управления.
Устройство для моделирования электромеханического привода (фиг.5) содержит модель обмоток электромагнитного механизма 6 (обмоток ШД) и модель привода 7, состоящую из блока вычислительных средств 8 и блока управления и индикации 9. Устройство дополнительно содержит блок имитации сигналов датчиков положения 10 привода (сигналов ГД и концевых выключателей НКВ1 и НКВ2), блоки имитации отказов 11.1-11.8 в обмотках электромагнитного механизма, по числу обмоток электромагнитного механизма (обмоток ШД), блоки преобразования токов 12.1-12.8 в обмотках электромагнитного механизма в напряжение, по числу обмоток электромагнитного механизма (обмоток ШД). Модель обмоток электромагнитного механизма 6 подключается последовательно к блокам имитации отказов 11.1-11.8 и блокам преобразования токов 12.1-12.8 внешним жгутом 13.
Входящие в устройство для моделирования электромеханического привода блоки соединены согласно структурной схеме устройства и выполняют следующие основные функции, описанные ниже.
Модель обмоток электромагнитного механизма 6 содержит в своем составе восемь обмоток (Ф1ШД1, Ф2ШД1,... Ф4ШД2), электромагнитные характеристики которых идентичны характеристикам обмоток ШД реального привода, и обеспечивает функционирование аппаратуры силового управления, в процессе проведения отработки и сдачи, в условиях, близких к реальным.
Модель привода 7 предназначена для решения модели привода и индикации коммутации обмоток аппаратурой управления, результатов моделирования работы привода, ГД и концевых выключателей, и управления работой блоков имитации отказов 11.1-11.8. Модель привода 7 состоит из блока вычислительных средств 8 и блока управления и индикации 9.
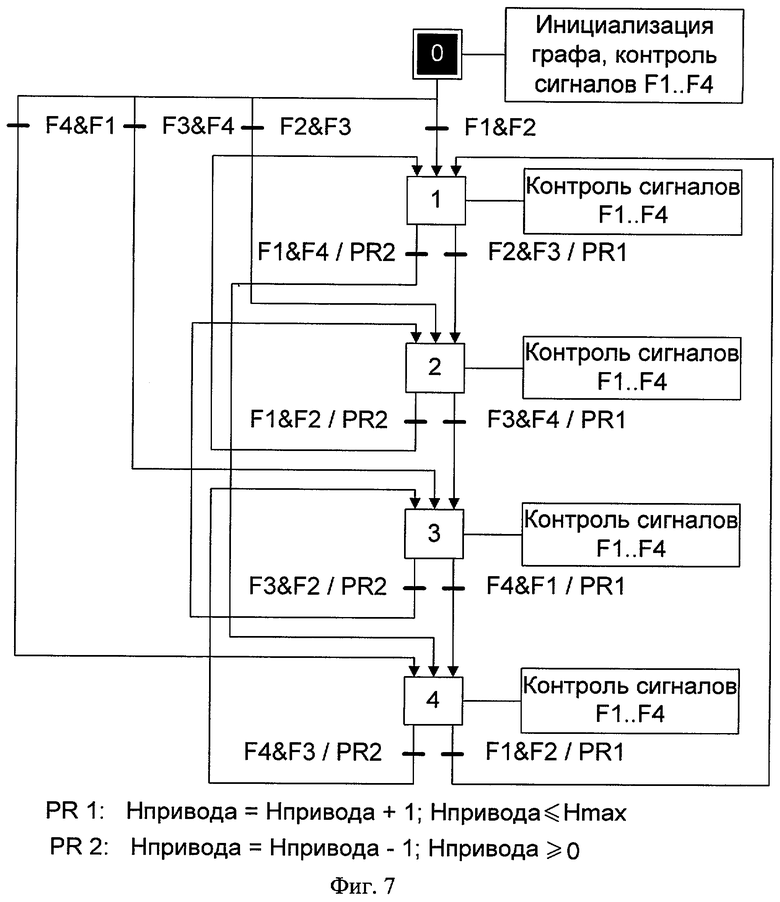
Блок вычислительных средств 8 состоит из микроконтроллера ЕСМ166, платы аналогового ввода/вывода PV2019 и платы дискретного вывода DM5902. В блок вычислительных средств 8 поступают сигналы напряжения от блоков преобразования токов 12.1-12.8, пропорциональные токам, протекающим в обмотках, на основе которых вычисляется положение привода. Для задания режимов работы программного обеспечения (ПО) блока вычислительных средств 8 и индикации коммутации обмоток и результатов работы блок вычислительных средств 8 связан с блоком управления и индикации 9. Автомат формирования положения для ШД1 (фиг.7), выполняющийся в составе ПО блока вычислительных средств 8, обеспечивает формирование сигнала положения привода при коммутации обмоток ШД1 привода аппаратурой управления. В зависимости от направления шага ("вперед" или "назад") сигнал положения привода Нпривода увеличивается или уменьшается на единицу и ограничивается предельными значениями положения - 0 и Нmax. Построение модели привода на базе цифровых вычислительных средств позволяет повысить глубину контроля аппаратуры управления и точность моделирования привода за счет использования более сложных алгоритмов контроля и модели привода, а также позволяет модифицировать алгоритмы контроля и модели привода в процессе отработок с незначительными затратами.
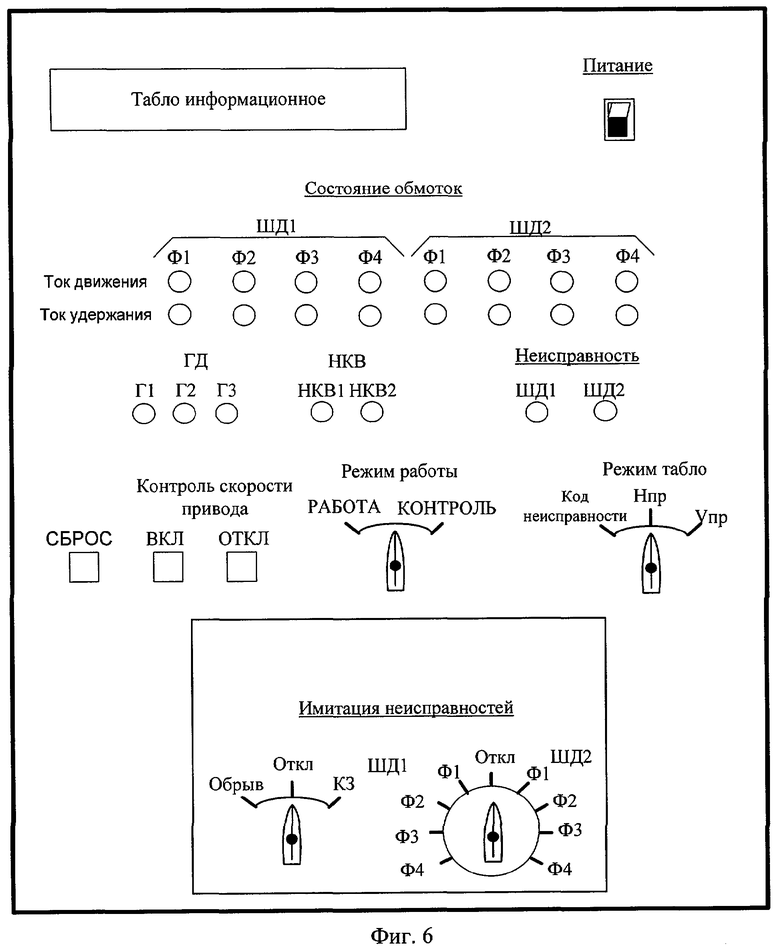
Блок управления и индикации 9 модели привода 7 предназначен для индикации коммутации обмоток аппаратурой управления, результатов моделирования работы привода, ГД и концевых выключателей, а также управления работой блоков имитации отказов 11.1-11.8 и блока вычислительных средств 8. Для индикации используются светодиоды и информационное табло (фиг.6).
Блок имитации сигналов датчиков положения привода 10 предназначен для вывода сигналов Г1, Г2 и Г3 ГД и концевых выключателей НКВ1 и НКВ2 с электрическими характеристиками, соответствующими сигналам ГД, и концевых выключателей реального привода. Управление выводом сигналов осуществляется посредством дискретных сигналов от модели привода 7.
Блоки имитации отказов 11.1-11.8 предназначены для имитации типовых неисправностей типа "ОБРЫВ" (обрыв обмотки) и "КЗ" (короткое замыкание) в обмотках электромагнитного механизма (обмотках ШД) и имеет в своем составе по два реле на каждую обмотку привода (для имитации отказов обмотки Ф1 ШД1 реле 14, для имитации обрыва обмотки, и реле 15, для имитации короткого замыкания обмотки). Обмотки реле блоков 11.1-11.8 управляются посредством коммутации ключей "ИМИТАЦИЯ НЕИСПРАВНОСТЕЙ" на лицевой панели блока управления и индикации 9 модели привода 7. При выборе посредством ключей "ИМИТАЦИЯ НЕИСПРАВНОСТЕЙ" обмотки ШД и типа неисправности производится замыкание соответствующего реле.
Блоки преобразования токов 12.1-12.8 предназначены для измерения токов, протекающих в обмотках модели обмоток электромагнитного механизма 6 или реального привода. Для измерения токов, протекающих в обмотках, используются датчики Холла (для обмотки Ф1 ШД1 датчик Холла 16), которые преобразуют сигнал силы тока в сигнал напряжения, пропорциональный силе тока, который поступает в блок вычислительных средств 8 модели привода 7.
Внешний жгут 13 предназначен для подключения к блокам 11.1-11.8 и 12.1-12.8 модели обмоток 6 или реального привода, при проведении аттестации устройства или отработках совместно с реальным приводом.
Предлагаемое устройство функционирует следующим образом: после включения питания на вход устройства подаются сигналы управления обмотками (Ф1ШД1Н, Ф1ШД1К,... Ф4ШД2Н, Ф4ШД2К) от аппаратуры силового управления. На основе сигналов управления обмотками устройство формирует сигнал положения привода, имитирует работу ГД и концевых выключателей НКВ1 и НКВ2, входящих в состав привода, в кинематической связи с управляющими сигналами на исполнительный механизм, производит контроль функционирования и технических характеристик аппаратуры управления и индикацию результатов моделирования и выявленных ошибок. Дополнительно устройство позволяет проводить отработку и сдачу аппаратуры силового управления с использованием реального привода, подключаемого вместо модели обмоток, а также имитировать типовые неисправности в обмотках.
В настоящее время устройство для моделирования электромеханического привода используется для проведения испытаний макетного образца сложной системы управления, в функции которой входит управление описанным выше электромеханическим приводом, в состав которой, в частности, входит трехканальная аппаратура регулирования и двухканальная аппаратура силового управления приводом, а также аппаратура контроля положения привода. Проведенные стендовые испытания подтвердили работоспособность предлагаемого устройства и широкие возможности его использования.
Аналоги изобретения
1. Авторское свидетельство СССР №551666, кл. G 06 G 7/62, 1977.
2. Авторское свидетельство RU №2088968, кл. G 06 G 7/62, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ N-РАЗРЯДНОГО ЦИФРОВОГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА С МАЖОРИТИРОВАНИЕМ УПРАВЛЯЮЩИХ СИГНАЛОВ | 1992 |
|
RU2088968C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| СПОСОБ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2331054C2 |
| УНИФИЦИРОВАННЫЙ ПРОЦЕДУРНЫЙ ТРЕНАЖЕР ЛЕТНОГО И ТЕХНИЧЕСКОГО ПЕРСОНАЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2279141C1 |
| Территориально-распределенный испытательный комплекс (ТРИКС) | 2018 |
|
RU2691831C1 |
| СИСТЕМА ЗАГРУЗКИ РЫЧАГОВ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2005 |
|
RU2298836C2 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| УСТРОЙСТВО, ИМИТИРУЮЩЕЕ ЭЛЕКТРОННЫМ СПОСОБОМ БЕСКОНТАКТНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР, И СТЕНД ПРОВЕРКИ И НАСТРОЙКИ БЛОКОВ РЕГУЛИРОВАНИЯ, ЗАЩИТЫ И УПРАВЛЕНИЯ | 2018 |
|
RU2710956C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| ПУЛЬТ НАВЕДЕНИЯ | 2018 |
|
RU2700367C1 |
Изобретение относится к системам управления, в частности к моделированию электромеханических приводов, и предназначено для полунатурного моделирования электромеханического привода при проведении отработок и сдаче штатных аппаратно-программных средств системы управления. Техническим результатом является повышение глубины контроля аппаратно-программных средств системы управления и точности моделирования электромеханического привода. Устройство содержит модель обмоток электромагнитного механизма (обмоток шаговых двигателей), модель привода, состоящую из блока вычислительных средств и блока управления и индикации, блок имитации сигналов датчиков положения, блоки имитации отказов в обмотках электромагнитного механизма, по числу обмоток электромагнитного механизма, и блоки преобразования токов в обмотках электромагнитного механизма в напряжения, по числу обмоток электромагнитного механизма. 7 ил.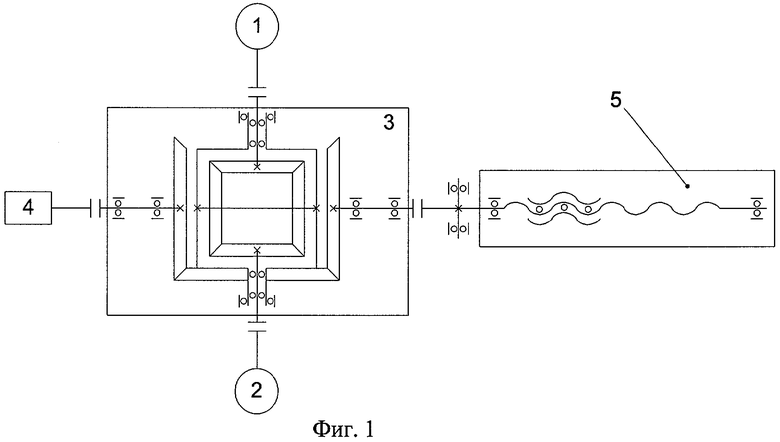
Устройство для моделирования электромеханического привода, содержащее модель обмоток электромагнитного механизма и модель привода, отличающееся тем, что дополнительно содержит блок имитации сигналов датчиков положения привода, предназначенный для формирования на выходах сигналов герконового датчика и концевых выключателей, блоки имитации отказов, количество которых равно числу обмоток электромагнитного механизма, каждый из блоков имитации отказов имеет в своем составе реле для имитации обрыва обмотки и реле для имитации короткого замыкания обмотки, которые управляются посредством коммутации ключей на лицевой панели блока управления и индикации, предназначенных для выбора обмотки и типа неисправности, блоки преобразования токов в напряжение, количество которых равно числу обмоток электромагнитного механизма, при этом модель электромагнитного механизма подключена последовательно внешним жгутом к блокам имитации отказов и блокам преобразования токов, а модель привода состоит из блока вычислительных средств, предназначенного для вычисления положения привода на основе сигналов напряжения от блоков преобразования токов и формирования сигналов управления работой блока имитации сигналов датчиков положения, и блока управления и индикации, предназначенного для индикации коммутации обмоток аппаратурой управления, результатов моделирования работы привода, герконового датчика и концевых выключателей, а также управления работой блоков имитации отказов и блока вычислительных средств.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ N-РАЗРЯДНОГО ЦИФРОВОГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА С МАЖОРИТИРОВАНИЕМ УПРАВЛЯЮЩИХ СИГНАЛОВ | 1992 |
|
RU2088968C1 |
| Устройство для моделирования привода | 1975 |
|
SU551666A1 |
| Устройство для моделирования привода | 1983 |
|
SU1138814A1 |
| Устройство для имитации неисправностей | 1989 |
|
SU1755283A1 |
| DE 19745946 A1, 22.04.1999. | |||

