Изобретение относится к способам посадки беспилотных летательных аппаратов (БЛА) аэродинамического типа, в частности сверхлегких (массой порядка одного килограмма) БЛА, оснащенных бортовыми электронными устройствами наблюдения за земной поверхностью, навигации и автоматического управления полетом.
Известен способ посадки БЛА с помощью парашютной системы (например, информационный бюллетень "Иностранная печать об экономическом, научно-техническом и военном потенциале...", серия "Технические средства разведывательных служб капиталистических государств", Москва, №6, 1998, с.21), при котором на БЛА предварительно устанавливают парашютную систему, при посадке раскрывают парашют и с его помощью гасят скорость приземления БЛА до допустимого значения.
Недостатком этого способа является увеличение общей массы БЛА за счет массы парашютной системы, приводящее к необходимости существенного уменьшения массы полезной нагрузки. Из-за указанных массогабаритных ограничений использование для посадки парашютной системы на сверхлегких БЛА затруднительно. Кроме того, раскрытие парашюта при сильном боковом ветре может привести к сносу БЛА и к его механическому повреждению, например, о ветви деревьев.
Другой известный способ посадки БЛА (как малой, так и большой массы) основан на гашении относительной скорости за счет скоординированного движения посадочной площадки.
К этому классу технических решений относится, например, способ посадки БЛА по японскому патенту JP №2001354199, В 64 F 1/00, В 63 В 35/50, В 64 С 13/18. Этот способ основан на движении посадочной площадки, роль которой выполняет палуба надводного судна (корабля, баржи и т.п.), со скоростью, близкой к горизонтальной скорости БЛА на заключительном участке посадки. При этом измеряют горизонтальную составляющую скорости БЛА и регулируют скорость движения судна таким образом, чтобы относительная скорость сближения БЛА и поверхности палубы стремилась к нулю.
Очевидно, что такой способ может иметь весьма ограниченное применение, и его использование создает значительные неудобства для объекта, используемого в качестве посадочной площадки.
Для устранения этого недостатка в качестве посадочной площадки используют платформу, на которой устанавливают вертикальную раму с посадочной сетью, выполненную с возможностью поворота вокруг вертикальной оси и горизонтального перемещения по закрепленным на платформе направляющим. На борту БЛА и на платформе устанавливают специальные электронные посадочные средства (оптические или радиолокационные), позволяющие дистанционно контролировать относительное местоположение и скорость сближения БЛА с сетью и управлять БЛА на конечном участке захода на посадку.
Так, в известном способе посадки БЛА путем улавливания его в вертикальную сеть (обзор "Дистанционно пилотируемые летательные аппараты капиталистических стран", под ред. Федосова Е.А., Москва, Научно-информационный центр, 1989, с.51-61)в носовой части БЛА устанавливают импульсный источник излучения, работающий в ближней инфракрасной (ИК) области спектра. На посадочной площадке устанавливают платформу с направляющими, которая в процессе посадки БЛА остается неподвижной, на платформу устанавливают вертикальную раму, выполненную с возможностью вращения вокруг вертикальной оси, и привод для этого вращения. На раму устанавливают два ИК-приемника, вертикальную посадочную сеть с возможностью ее горизонтального перемещения по направляющим, закрепленным на платформе, вычислитель и тормозное устройство, которое тросами соединяют с сетью. С помощью привода раму предварительно поворачивают по направлению ветра. На конечном участке захода БЛА на посадку путем дистанционного управления с земли выводят его в зону действия ИК-приемников, измеряют с их помощью угол возвышения и боковое смещение БЛА относительно центра сети, вычисляют значения отклонений БЛА от программной траектории полета и передают эти данные на борт БЛА для обеспечения его попадания в сеть. При входе БЛА в сеть перемещают последнюю вдоль направляющих рамы, за счет вытягивания тросов тормозного устройства гасят кинетическую энергию движения БЛА и высвобождают попавшийся в сеть БЛА из сети.
К этому же классу технических решений относится усовершенствованный способ посадки БЛА в вертикальную сеть по патенту RU №2208555, В 64 F 1/18, В 64 С 13/20, G 08 C 5/02.
Он отличается от описанного выше аналога тем, что с целью повышения вероятности неповреждения БЛА при его посадке в сеть платформу устанавливают с возможностью поступательного перемещения по направлению горизонтальной оси, перпендикулярной плоскости этой сети. Дополнительно устанавливают привод перемещения платформы. На вертикальной раме дополнительно устанавливают датчик линейного ускорения, ось чувствительности которого выставляют по направлению, перпендикулярному плоскости сети, дальномер и датчик начала вытягивания тросов тормозного устройства. В вычислитель заблаговременно вводят значение максимальной зоны действия ИК-приемников в простых метеорологических условиях. При посадке в момент входа БЛА в зону действия ИК-приемников определяют текущее значение дальности и скорости сближения БЛА с посадочной площадкой. В вычислителе запоминают значения дальности и скорости движения БЛА в момент его входа в зону действия ИК-приемников. С использованием определенных величин вычисляют требуемое значение ускорения поступательного перемещения платформы. Далее, включают привод поступательного перемещения платформы. С помощью этого привода поступательно перемещают платформу. При этом с помощью датчика линейного ускорения измеряют текущие значения ускорения и скорости перемещения. Вычисляют разность текущего и требуемого значений скоростей. Управляют приводом, стремясь уменьшить указанную разность скоростей до нуля. В момент попадания БЛА в сеть выключают привод по сигналу от датчика начала вытягивания тросов тормозного устройства.
Как следует из приведенного описания, для реализации обоих описанных выше способов улавливания БЛА в вертикальную сеть требуется довольно сложное и громоздкое наземное оборудование, выполненное с возможностью автоматического управления процессом торможения. При этом на заключительном участке полета БЛА необходимо дистанционно управлять им с земли путем передачи соответствующих команд по линии связи. Указанные особенности ограничивают сферу возможного применения способов улавливания БЛА в вертикальную сеть, особенно в тех случаях, когда БЛА должен иметь небольшую стоимость, малые массу и габариты. В этих случаях применение сложных посадочных устройств не оправдано ни по тактическим, ни по экономическим соображениям.
В качестве прототипа настоящего изобретения выбран указанный выше способ посадки БЛА путем его улавливания в вертикальную сеть по патенту RU №2208555, В 64 F 1/18, В 64 С 13/20, G 08 C 5/02.
Настоящее изобретение направлено на устранение указанных выше недостатков способа-прототипа.
Предметом изобретения является способ посадки БЛА, при котором до начала полета БЛА на нем устанавливают электронную аппаратуру наведения, на посадочной площадке размещают наземное посадочное оборудование и посадочную платформу, оснащенную посадочным приспособлением, при заходе БЛА на посадку выводят его в зону действия наземного посадочного оборудования, по сигналам которого электронной аппаратурой наведения осуществляют наведение БЛА на посадочную площадку по заданной траектории, обеспечивая снижение скорости его движения и выход в точку механического контакта с посадочным приспособлением, после чего полностью гасят кинетическую энергию БЛА и высвобождают его из посадочного приспособления, - при этом до начала полета приклеивают к нижней части поверхности фюзеляжа БЛА бортовую ленту-контакт, лицевая сторона которой покрыта петлевыми мононитями, а в составе электронной аппаратуры наведения БЛА используют систему видеонаведения, выполненную с возможностью визуального распознавания посадочной площадки, оценки текущего расстояния до посадочного приспособления и удержания БЛА на заданной траектории посадки, в качестве посадочной платформы используют вертикально установленную посадочную платформу-шест, на верхнем конце которой закреплено посадочное приспособление-шар, верхнюю часть поверхности посадочного приспособления-шара оклеивают наземной лентой-контактом, лицевая сторона которой покрыта петлевыми мононитями, выполненными с возможностью крючкового сцепления по типу текстильной застежки с петлевыми мононитями бортовой ленты-контакта на фюзеляже БЛА, а в качестве наземного посадочного оборудования используют один или несколько пространственно разнесенных наземных оптических источников излучения, размещаемых на посадочной площадке, по сигналам которых осуществляют самонаведение БЛА до механического контакта между нижней частью поверхности его фюзеляжа и верхней полусферой посадочного приспособления-шара, а гашение кинетической энергии БЛА осуществляют за счет упругого отклонения и возвратно-поступательного движения с постепенно уменьшающейся амплитудой верхней части посадочной платформы-шеста.
Частными существенными признаками изобретения являются следующие.
Посадочная платформа-шест представляет собой цилиндрическую штангу, выполненную из упругого, пластичного материала.
Наземные оптические источники излучения, размещаемые на посадочной площадке, являются оптическими отражателями, характеризующимися контрастом по отношению к близлежащим техногенным и природным объектам.
В качестве наземного посадочного оборудования используют посадочное приспособление-шар, при этом цвет наземной ленты-контакта, наклеиваемой на верхнюю часть его оболочки, выбирают, исходя из критерия ее максимальной заметности на фоне подстилающей поверхности.
Один или несколько оптических отражателей размещают на поверхности посадочного приспособления-шара.
Внутри посадочного приспособления-шара устанавливают источник света, а в верхней части оболочки посадочного приспособления-шара и в наклеенной на нее наземной ленте-контакте проделывают отверстия для пропускания света.
Задачей настоящего изобретения является создание технологии посадки сверхлегкого БЛА, которая не требовала бы сложного и дорогостоящего наземного посадочного оборудования и обеспечивала бы при этом высокую вероятность неповреждения БЛА.
Обеспечиваемый технический результат заключается в упрощении посадочной платформы, уменьшении ее массы и габаритов (посадочной платформой в заявляемом способе является вертикально установленный на посадочной площадке упругий шест). Технический результат также заключается в упрощении конструкции и повышении надежности работы посадочного приспособления (которое в заявляемом способе представляет собой шар с наклеенной на него наземной лентой-контактом).
Этот технический результат достигается, благодаря применению для захвата БЛА на заключительном участке посадки технологии "текстильной застежки", реализуемой с помощью высокопрочной эксплуатационно надежной ленты-контакта (как бортовой - на БЛА, так и наземной - на посадочном приспособлении), а также благодаря использованию для торможения БЛА свойства упругости посадочной платформы-шеста.
Суть изобретения поясняется на фиг.1-4.
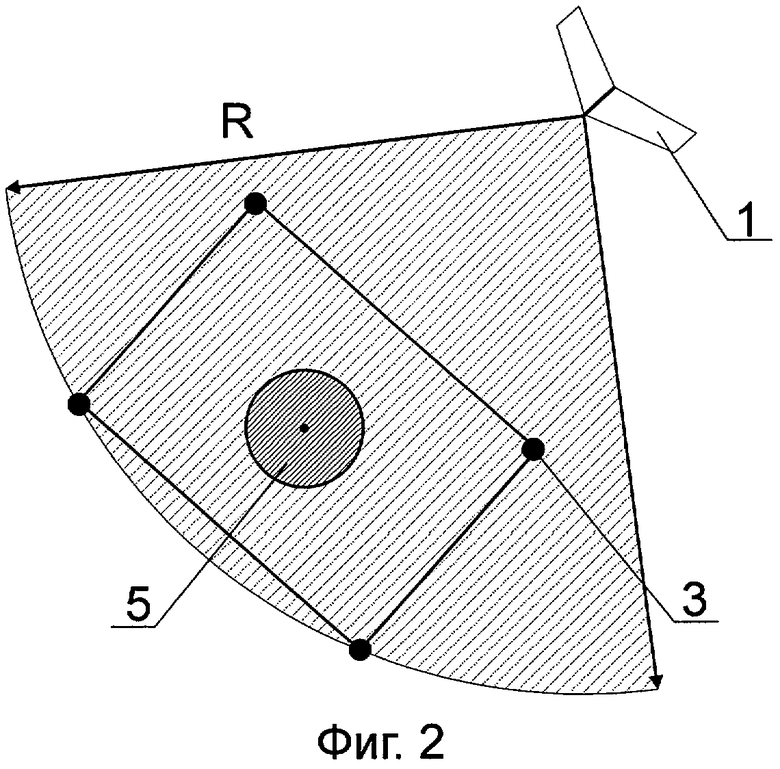
На фиг.1 представлен в двух ракурсах: вид снизу и вид спереди (полет и посадка) эскиз сверхлегкого БЛА, разработанного предприятием-заявителем. Геометрические размеры (размах крыльев, длина и ширина фюзеляжа) указаны в миллиметрах.
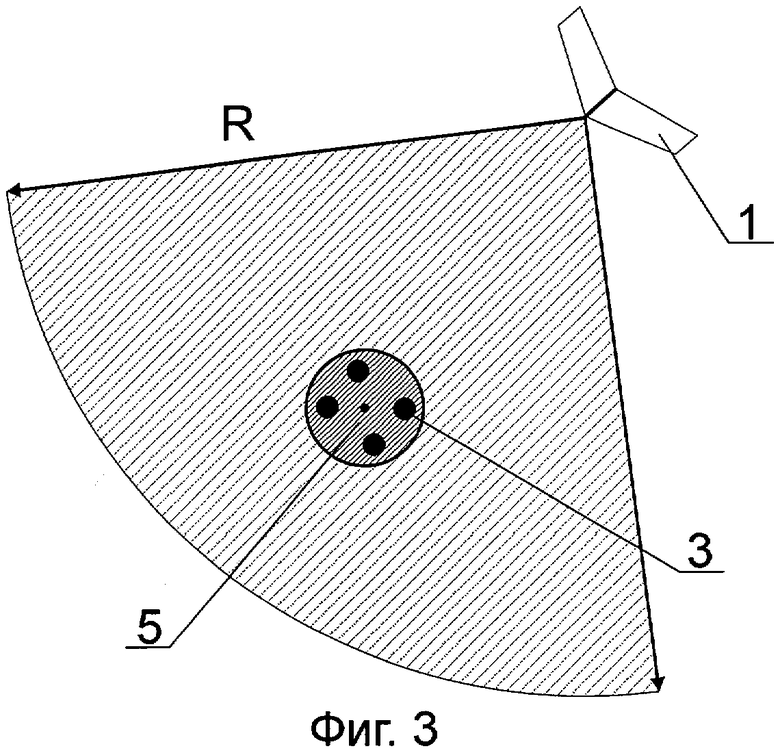
На фиг.2 показано взаимное расположение (вид сверху в горизонтальной плоскости):
- БЛА, оснащенного бортовой системой видеонаведения;
- посадочного приспособления-шара;
- наземных оптических источников излучения, распределенных по посадочной площадке.
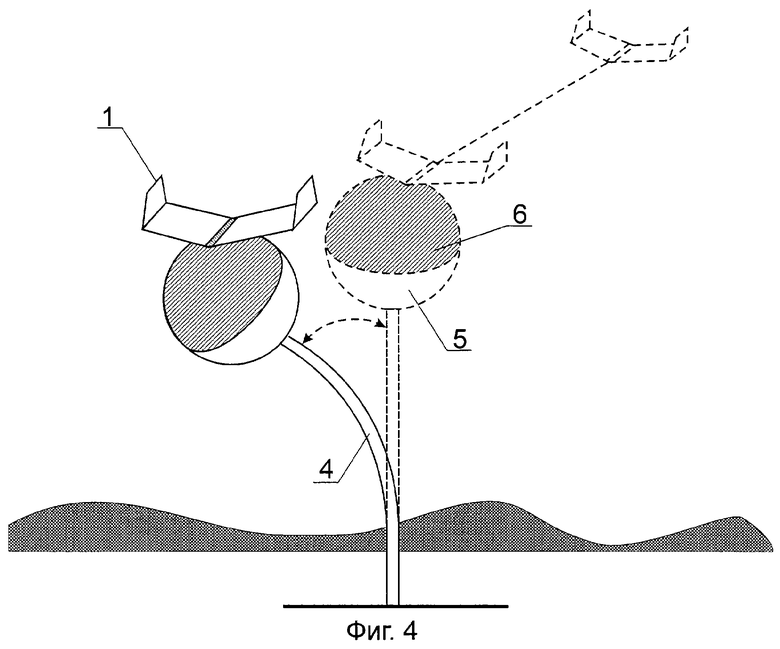
На фиг.3 показано взаимное расположение (вид сверху в горизонтальной плоскости):
- БЛА, оснащенного бортовой системой видеонаведения;
- посадочного приспособления-шара;
- наземных оптических источников излучения, распределенных по поверхности посадочного приспособления-шара.
Фиг.4 иллюстрирует процесс захвата и торможения БЛА посадочным приспособлением-шаром, установленным на посадочной платформе-шесте.
На фиг.1-4 использованы следующие обозначения: 1 - БЛА; 2 - система видеонаведения; 3 - наземные оптические источники излучения; 4 - посадочная платформа-шест; 5 - посадочное приспособление-шар; 6 - наземная лента-контакт; 7 - бортовая лента-контакт; 8 - силовая установка; 9 - внутренние элевоны; 10 - внешние элевоны; 11 - консоль; 12 - вертикальные стабилизаторы.
В роли БЛА 1 может выступать любой летательный аппарат с аэродинамической схемой построения. Для примера рассмотрим сверхлегкий малоразмерный БЛА 1 типа "летающее крыло" на электротяге (фиг.1) с полетной массой порядка 1 кг. На чертеже показаны основные элементы конструкции и характерные габаритные размеры опытного образца такого БЛА 1, разработанного на предприятии-заявителе.
Заявленный способ реализуется, благодаря следующим особенностям летно-посадочного оборудования:
- установке в носовой части БЛА 1 системы 2 видеонаведения, позволяющей БЛА 1 попасть в район расположения посадочной площадки;
- нанесению на нижнюю часть поверхности фюзеляжа БЛА 1 посадочного приспособления в виде бортовой ленты-контакта 7;
- установке на посадочной площадке посадочной платформы-шеста 4 в виде гибкого упругого шеста с жестко закрепленным на земле нижним концом и со свободным верхним концом, на котором жестко закреплено посадочное приспособление-шар 5;
- нанесению на верхнюю часть поверхности посадочного приспособления-шара 5 наземной ленты-контакта 6, ответной по отношению к бортовой ленте-контакту 7, нанесенной на нижнюю часть поверхности фюзеляжа БЛА 1. Взаимодействие наземной ленты-контакта 6 и бортовой ленты-контакта 7 обеспечивает при этом механический контакт, захват и торможение БЛА 1;
- полному гашению кинетической энергии БЛА 1 за счет отклонения посадочной платформы-шеста 4 от вертикального положения в момент механического контакта БЛА 1 с поверхностью посадочного приспособления-шара 5 и его последующего возвратно-поступательного движения с постепенно уменьшающейся амплитудой.
Рассматриваемый вариант БЛА 1 типа "летающее крыло" (фиг.1) состоит из консолей 11 и фюзеляжа. На консолях 11 располагаются плоскости управления - внутренние 9 и внешние 10 элевоны и вертикальные стабилизаторы 12, выполненные из легкого синтетического материала. Фюзеляж (центральная часть) содержит рабочий отсек, в котором располагаются элементы питания, навигации и управления, а также полезная нагрузка в виде системы 2 видеонаведения. Снаружи, на верхней части фюзеляжа, располагается силовая установка 8, представляющая собой турбину, приводимую в действие электродвигателем, расположенным внутри цилиндрического корпуса турбины. Горизонтальную тягу создает вращающаяся крыльчатка, находящаяся внутри цилиндрического корпуса турбины. Фюзеляж выполнен из стеклопластика или углепластика. На нижнюю часть его поверхности наклеена бортовая лента-контакт 7, обеспечивающая "прилипание" ЕЛА 1 к покрытой наземной лентой-контактом 6 верхней части сферической поверхности посадочного приспособления-шара 5.
Основные тактико-технические характеристики опытного образца БЛА 1 типа "летающее крыло" представлены в таблице 1.
Ключевым фактором, определяющим практическую возможность реализации заявленного способа, являются уникальные свойства наземной ленты-контакта 6 и бортовой ленты-контакта 7. Как отмечается в информационном материале, размещенном на сайте www.gamma.msk.ru, в настоящее время промышленностью серийно производится лента-контакт ("велькро", "репейник", "липучка"), устойчивая к воздействию воды и химических чистящих средств, которая обеспечивает высокую прочность сцепления. В авиационной технике такие виды ленты-контакта применяется для крепления (по типу текстильной застежки) различных приборов и аксессуаров внутри салона самолета.
В таблице 2 приведены характеристики прочности сцепления указанных бортовой 7 и наземной 6 лент-контактов в варианте текстильной застежки (http://www.igolochka.ru/lipuchka.php).
Как видно из таблицы 2, соединение между лентами-контактами шириной 5 см выдерживает усилие сдвига до 285 Н, что достаточно для гашения скорости сверхлегкого БЛА 1 с помощью описанной выше конструкции посадочной платформы-шеста 4 с жестко закрепленным посадочным приспособлением-шаром 5. Снижение ударной нагрузки на БЛА 1 в момент механического контакта БЛА 1 с посадочным приспособлением-шаром 5 обеспечивается, благодаря пружинящему действию упругой вертикально закрепленной штанги посадочной платформы-шеста 4. Если использовать природную аналогию, то это напоминает посадку насекомого на цветок.
Очевидно, что элементы такого посадочного оборудования более просты и удобны в эксплуатации, чем в прототипе (RU №2208555, В 64 F 1/18, B 64 C 13/20, G 08 C 5/02).
Так, посадочная платформа-шест 4 представляет собой цилиндрическую штангу, выполненную из упругого пластичного материала.
Посадочное приспособление-шар 5, устанавливаемое на верхней части посадочной платформы-шеста 4, значительно проще и безопаснее для БЛА 1, чем использованная в прототипе сетка в подвижной раме, установленная на тележке. При этом не требуется регулировать угол ориентации сетки в вертикальной плоскости и осуществлять торможение в горизонтальной плоскости с помощью тросового механизма. Благодаря форме посадочного приспособления-шара 5 заход на него БЛА 1 может осуществляться под любым углом в горизонтальной плоскости.
В качестве наземных оптических источников 3 излучения, размещаемых на посадочной площадке, могут быть применены простейшие оптические отражатели, например, зеркала, создающие значительный контраст по отношению к подстилающей поверхности (фиг.2).
Еще более простым является вариант практической реализации, при котором роль наземного посадочного оборудования играет посадочное приспособление-шар 5. Это достигается путем окрашивания наклеиваемой на его поверхности наземной ленты-контакта 6 в яркий цвет для достижения максимальной заметности поверхности посадочного приспособления-шара 5 на фоне подстилающей поверхности.
Возможен также вариант размещения наземных оптических источников 3 излучения - оптических отражателей - на поверхности посадочного приспособления-шара 5 (фиг.3).
Наконец, наземное посадочное оборудование может включать в свой состав любой источник света, размещенный внутри посадочного приспособления-шара 5, в верхней части оболочки которого проделаны отверстия для прохождения света.
Применяемая на БЛА 1 система 2 видеонаведения представляет собой видеомодуль, содержащий цифровую видеокамеру с оптической системой и цифровым видеопроцессором, выход которого подключен ко входу системы навигации и управления полетом БЛА 1.
В качестве видеомодуля может быть использована, к примеру, сверхкомпактная видеосистема ADCM-2650-0001 фирмы Agilent Technologies, Inc.
Она содержит высококачественный объектив, миниатюрную видеокамеру на комплементарных металлоксидных полевых интегральных схемах (CMOS), обеспечивающих сверхмалое потребление (не более 120 мВт при тактовой частоте свыше 13 МГц) и высокое разрешение в формате VGA (не хуже 480×640 пикселей), а также высокопроизводительный цифровой процессор, выполненный с возможностью обработки изображений в формате VGA и сжатия изображений в формате JPEG.
Видеопроцессор может быть запрограммирован на распознавание наземных объектов определенной конфигурации и цвета. Как отмечалось выше, это могут быть либо несколько распределенных по территории посадочной площадки наземных оптических источников 3 излучения в виде оптических отражателей (например, зеркал), либо используемое посадочное приспособление-шар 5 с контрастной по отношению к подстилающей поверхности цветной наземной лентой-контактом 6. Способ и устройство для распознавания таких объектов и видеонаведения на них БЛА 1 подробно описаны, например, в патенте RU №2248307, В 64 С 29/00, G 08 C 21/00.
Таким образом, рассматриваемый способ посадки БЛА 1 практически реализуем, а устройства, требуемые для его реализации, значительно проще устройств, требуемых для реализации способа-прототипа.
Предлагаемый способ посадки БЛА 1 включает в себя следующую последовательность операций. До начала полета БЛА 1 (фиг.1) на его борту устанавливают электронную аппаратуру, включающую в себя систему 2 видеонаведения, выполненную с возможностью визуального распознавания посадочной площадки, в пределах которой устанавливают один наземный оптический источник 3 излучения или заданную конфигурацию нескольких наземных оптических источников 3 излучения. В центральной части посадочной площадки устанавливается вертикальная посадочная платформа-шест 4 из упругого пластичного материала, на верхнем конце которой находится посадочное приспособление-шар 5. В свою очередь, на верхнюю часть поверхности посадочного приспособления-шара 5 наклеивается наземная лента-контакт 6.
На заключительном этапе полета БЛА 1 его выводят в зону действия системы 2 видеонаведения радиусом R (фиг.2, 3). С помощью системы 2 видеонаведения БЛА 1 автономно, под заданным углом возвышения, выходит на посадочное приспособление-шар 5. При этом должен обеспечиваться механический контакт верхней части посадочного приспособления-шара 5, на которую наклеена наземная лента-контакт 6, с нижней частью фюзеляжа БЛА 1, на которую наклеена ответная бортовая лента-контакт 7. До момента пересечения границы зоны действия системы 2 видеонаведения радиусом R БЛА 1 управляется, например, с помощью спутниковой радионавигационной системы или любой другой навигационной системы. После начала самонаведения ориентация и управление БЛА 1 осуществляются с более высокой точностью - по видеоизображениям, получаемым системой 2 видеонаведения. Самонаведение осуществляется на наземные оптические источники 3 излучения. При этом возможны различные варианты формирования наземных оптических источников 3 излучения.
Наземные оптические источники 3 излучения, размещаемые на посадочной площадке, могут быть оптическими отражателями, например, зеркалами, характеризующимися высоким контрастом по отношению к близлежащим техногенным и природным объектам.
В качестве наземного посадочного оборудования может быть использовано само посадочное приспособление-шар 5, при этом цвет наклеиваемой на его поверхность наземной ленты-контакта 6 выбирают, исходя из критерия ее максимальной заметности на фоне подстилающей поверхности.
Один или несколько оптических отражателей могут быть размещены и на поверхности посадочного приспособления-шара 5.
Наземные оптические источники 3 излучения могут быть сформированы также путем установки внутри посадочного приспособления-шара 5 источника света и проделывания в верхней части оболочки посадочного приспособления-шара 5 и в наклеенной на нее наземной ленте-контакте 6 отверстий для пропускания света.
Конкретный вид алгоритмов навигации и последующего самонаведения на заключительном участке посадки не является существенным для настоящего изобретения, и далее не уточняются.
При подлете на заранее заданное расстояние к посадочному приспособлению-шару 5 БЛА 1 переходит в посадочный режим:
- уменьшаются тяга электродвигателя силовой установки 8 и, соответственно, скорость вращения крыльчатки силовой установки 8;
- опускаются внутренние элевоны 9 и поднимаются внешние элевоны 10, в результате чего гасится горизонтальная составляющая скорости движения.
Таким образом, кинетическая энергия ЕЛА 1 уменьшается до некоторой безопасной величины.
При этом управление тягой двигателя, внутренними 9 и внешними 10 элевонами осуществляются таким образом, чтобы сближение БЛА 1 с посадочным приспособлением-шаром 5 происходило наиболее эффективно, то есть БЛА 1 плавно подходил бы к посадочной платформе-шесту 4 под заданным углом возвышения, постепенно гася кинетическую энергию своего движения. Как было отмечено выше, угол подхода в горизонтальной плоскости не имеет при этом значения, поскольку посадка производится на сферическую поверхность.
Малая масса БЛА 1 и большой размах консолей 11 крыльев, на концах которых расположены вертикальные стабилизаторы 12, определяют хорошую управляемость БЛА 1 на заключительном участке посадки.
В момент контакта БЛА 1 с посадочным приспособлением-шаром 5 БЛА 1 как бы "прилипает" к верхней части посадочного приспособления-шара 5, оклеенной наземной лентой-контактом 6 (фиг.4).
Остаточная кинетическая энергия гасится при этом за счет упругого отклонения посадочной платформы-шеста 4 от вертикального положения и возвратно-поступательного движения верхнего конца посадочной платформы-шеста 4 с постепенно уменьшающейся амплитудой, чем обеспечивается плавное торможение БЛА 1, "прилипшего" к посадочному приспособлению-шару 5.
Таким образом, предложена новая технология посадки сверхлегкого БЛА 1, которая не требует сложного и дорогостоящего летно-посадочного оборудования и обеспечивает при этом высокую вероятность неповреждения БЛА 1, благодаря чему решается поставленная задача изобретения.
Обеспечиваемый технический результат заключается в упрощении и уменьшении массы посадочной платформы, а также в упрощении конструкции и повышении надежности посадочного приспособления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| СПОСОБ ПОСАДКИ СВЕРХЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2307047C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| Наземное подвижное средство посадки (НПСП) беспилотного летательного аппарата (БЛА) и способ посадки БЛА на НПСП | 2016 |
|
RU2624522C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОГО ТИПА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2767389C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539703C2 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
Изобретение относится к способам посадки сверхлегких беспилотных летательных аппаратов (БЛА) аэродинамического типа. До начала полета на БЛА устанавливают электронную аппаратуру наведения. На посадочной площадке размещают наземное посадочное оборудование и посадочную платформу с посадочным приспособлением. При заходе БЛА на посадку выводят его в зону действия наземного посадочного оборудования. По сигналам последнего электронной аппаратурой наведения осуществляют наведение БЛА на посадочную площадку по заданной траектории, обеспечивая снижение скорости его движения и выход в точку механического контакта с посадочным приспособлением. После этого полностью гасят кинетическую энергию БЛА и высвобождают его из посадочного приспособления. До начала полета приклеивают к нижней части поверхности фюзеляжа БЛА ленту-контакт, лицевая сторона которой покрыта петлевыми мононитями с боковым разрезом, играющими роль крючков. В качестве электронной аппаратуры наведения БЛА используют систему видеонаведения. Посадочной платформой является вертикально установленный шест. Посадочное приспособление-шар крепят на верхнем конце шеста. Поверхность шара оклеивают лентой-контактом, лицевая сторона которой покрыта петлевыми мононитями, выполненными с возможностью крючкового сцепления по типу текстильной застежки с мононитями ленты-контакта БЛА. Наземным посадочным оборудованием являются пространственно разнесенные оптические источники, размещаемые на посадочной площадке. По их сигналам осуществляют самонаведение БЛА до механического контакта с верхней полусферой посадочного приспособления. Изобретение позволяет создать технологию посадки сверхлегкого БЛА, которая обеспечивает высокую вероятность неповреждения БЛА. 5 з.п. ф-лы, 4 ил., 2 табл.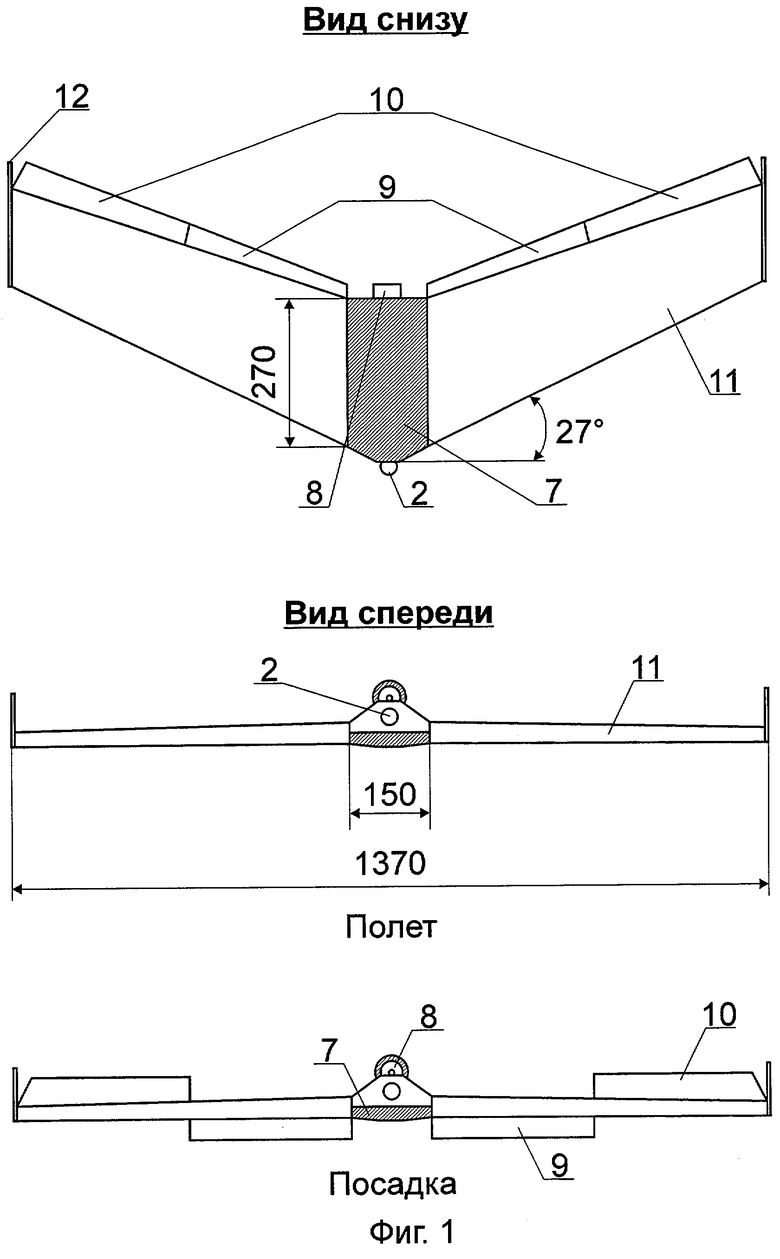
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| JP 2001354199, 25.12.2001 | |||
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К МЕСТУ ПРИЗЕМЛЕНИЯ И КОМПЛЕКС УСТРОЙСТВ НАЗЕМНОГО И БОРТОВОГО ОБОРУДОВАНИЯ | 1995 |
|
RU2110448C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |

